JP2019128147A - 風速測定システム、風速測定装置、風速測定方法、及びプログラム - Google Patents
風速測定システム、風速測定装置、風速測定方法、及びプログラム Download PDFInfo
- Publication number
- JP2019128147A JP2019128147A JP2018007569A JP2018007569A JP2019128147A JP 2019128147 A JP2019128147 A JP 2019128147A JP 2018007569 A JP2018007569 A JP 2018007569A JP 2018007569 A JP2018007569 A JP 2018007569A JP 2019128147 A JP2019128147 A JP 2019128147A
- Authority
- JP
- Japan
- Prior art keywords
- wind speed
- wind
- prediction
- unit
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
- G01P13/025—Indicating direction only, e.g. by weather vane indicating air data, i.e. flight variables of an aircraft, e.g. angle of attack, side slip, shear, yaw
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P5/00—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Indicating Or Recording The Presence, Absence, Or Direction Of Movement (AREA)
Abstract
【課題】装置構成を簡略化しつつ、任意の位置及び時刻の測定対象箇所の風速及び風向を予測することができる風速測定システム、風速測定装置、風速測定方法、及びプログラムを提供すること。
【解決手段】複数の箇所における風速を測定する複数の測定部(10―m)と、複数の測定部により測定された風速及び風向に基づいて第1風速情報を生成し、生成した第1風速情報に基づいて、複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部(21)と、予測部により予測された予測情報を出力する出力部(28)と、を備える風速測定システム(1)である。
【選択図】図3
【解決手段】複数の箇所における風速を測定する複数の測定部(10―m)と、複数の測定部により測定された風速及び風向に基づいて第1風速情報を生成し、生成した第1風速情報に基づいて、複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部(21)と、予測部により予測された予測情報を出力する出力部(28)と、を備える風速測定システム(1)である。
【選択図】図3
Description
本発明は、風速測定装置、風速測定システム、風速測定方法、及びプログラムに関する。
車両の燃費測定の際に、風の抵抗を考慮するため、車両がどのような風を受けているかを正確に認識する必要がある。これに関連して、レーザレーダを走査し、被観測点の風向および風速の測定を行う技術が知られている(例えば特許文献1参照)。
車両が走行する予定のコースの風速を、レーザレーダを用いて測定するためには、非常に高価な設備を設置する必要があった。なお、測定装置をコース上の多数の箇所に設置して各箇所の風速及び風向を測定することも想定されるが、この場合には大量の測定装置が必要となると共に、大量の装置を設置する手間が必要となるため、コストが増大すると共に作業効率が悪化する。
本発明は、このような事情を考慮してなされたものであり、装置構成を簡略化しつつ、任意の位置及び時刻の測定対象箇所の風速及び風向を予測することができる風速測定システム、風速測定装置、風速測定方法、及びプログラムを提供することを目的の一つとする。
(1):複数の位置における風速及び風向を測定する複数の測定部と、前記複数の測定部により測定された前記風速及び前記風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部と、前記予測部により予測された予測情報を出力する出力部と、を備える風速測定システムである。
(2):(1)の風速測定システムであって、前記第1風速情報は、前記複数の測定部により測定された前記風速及び前記風向に基づいて導出された風の群速度を含み、前記予測部は、前記第1風速情報と、前記複数の位置の内の第1箇所から前記予測必要箇所までの距離とに基づいて、前記予測必要箇所における風速及び風向を予測するものである。
(3):(2)の風速測定システムであって、前記予測部は、前記複数の箇所において所定時間の間に測定された前記風速及び前記風向の大きさに関する波形パターンが移動する速度に基づいて、前記群速度を導出するものである。
(4):(1)から(3)のいずれかの風速測定システムであって、第1箇所の風速及び風向を測定する第1測定部と、前記第1箇所と離間した第2箇所の風速及び風向を測定する第2測定部を更に有し、前記予測必要箇所は、前記第1箇所と前記第2箇所との間の箇所であり、前記予測部は、前記第1測定部により測定された風速及び風向と前記第2測定部により測定された風速及び風向とに基づいて、前記予測必要箇所の風速及び風向を予測するものである。
(5):(1)から(4)のうちいずれかの風速測定システムであって、前記複数の測定部のぞれぞれは、位置データを計測すると共に、計測時の時刻データを取得するGPS装置を更に備え、前記測定部は、測定した前記風速及び前記風向と、前記GPS装置から取得した前記位置データ及び前記時刻データとを含む前記第1風速情報を生成し、前記予測部は、前記複数の測定部のそれぞれから取得した複数の前記第1風速情報を前記第1風速情報に含まれる前記時刻データに基づいて時刻で同期し、任意の位置における予測必要箇所の風速及び風向を予測するものである。
(6):(1)から(5)のうちいずれかの風速測定システムであって、前記複数の測定部からデータを取得する基地局を更に備え、前記基地局は、所定方向に沿って配置された前記複数の測定部に対して略中央の位置に配置されているものである。
(7):複数の位置において測定された風速及び風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部と、前記予測部により予測された風速及び風向に関する情報を出力する出力部と、を備える、風速測定装置である。
(8):複数の位置に風速及び風向を測定するための複数の測定部を設置し、前記複数の測定部により前記複数の箇所における風速及び風向を測定し、コンピュータが、前記複数の測定部により測定された前記風速及び前記風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測し、予測された予測情報を出力する、風速測定方法である。
(9):コンピュータに、複数の位置において測定された風速及び風向に基づいて第1風速情報を生成させ、生成させた前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測させ、予測された予測情報を出力部に出力させる、プログラムである。
(1)〜(9)によれば、装置構成を簡略化しつつ、任意の位置及び時刻の測定対象箇所の風速及び風向を予測することができる。
以下、図面を参照し、本発明の風速測定装置、風速測定システム、風速測定方法、及びプログラムの実施形態について説明する。
図1は、第1実施形態の風速測定システム1の構成の一例を示す図である。風速測定システム1は、例えば、基地局T0と、複数の検出部Tm(mは任意の自然数)とを備える。基地局T0は、複数の検出部Tmから出力されたデータを収集する。基地局T0は、例えば、端末装置20と、出力部28と、送受信部50とを備える。
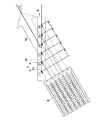
図2は、風速測定システム1がコースR上に配置されている様子を説明するための図である。図2に示されるように、風速測定システム1は、例えば、車両Mが走行するコースR上の第1箇所P1〜第m箇所Pmの複数の位置に設置された複数の第1測定部10により測定された風の風速及び風向に基づいて、複数の位置の間の任意の位置における予測必要箇所Q1の風速及び風向を予測するものである。
図1に戻り、検出部Tmは、例えば、第1測定部10―mと、端末装置20−mと、出力部28−mと、温度測定部30−mと、GPS装置40−mと、送受信部50mとを備える。第1測定部10―mは、三脚15−mに固定され、作業者により任意の位置に運搬される。第1測定部10−mは、例えば、端末装置20−mとケーブルC1を介して接続されている。
GPS装置40−mと、送受信部50−mとは、三脚60−mに固定され、作業者により任意の位置に設置される。GPS装置40−mは、端末装置20−mとケーブルC2を介して接続されている。送受信部50は、端末装置20−mとケーブルC3を介して接続されている。第1測定部10−m、GPS装置40−m、送受信部50−mのそれぞれと端末装置20−mとは無線で接続されていてもよい。
第1測定部10−mは、例えば、風向風速計である。第1測定部10−mは、例えば、複数の超音波送受信センサを11−m備える。第1測定部10−mは、超音波が各センサに到達する時間を測定し、風によって生じる時間の遅延に基づいて、風の風速及び風向の値を算出する。第1測定部は、例えば、車両が走行するコースR上の第m箇所Pm(図2参照)に設置され、第m箇所Pmにおける風の風速及び風向を測定する。第1測定部10−mは、所定のサンプリング間隔で測定結果を端末装置20−mに出力する。
端末装置20は、第1測定部10−mから第m箇所における風向および風速の測定結果を取得する。温度測定部30は、外気温を測定し、端末装置20−mに出力する。GPS装置40−mは、衛星電波の解析の過程で時刻を導出し、あるいは特定の衛星電波に含まれる時刻を利用することで、他装置と共通する時刻を特定する。また、GPS装置40−mは、衛星電波を解析し、自体の位置を測定し、位置データを時刻とともに端末装置20−mに出力する。但し、第1測定部10−mが予め定められた所定の位置に設置される場合、位置データは必ずしも必要ではない。
送受信部50−mは、例えば、セルラー網やWi−Fi(登録商標)網、Bluetooth(登録商標)、DSRC(Dedicated Short Range Communication)等を利用して、基地局T0と通信し、或いは無線基地局を介して各種サーバ装置と通信する。
端末装置20−mは、基地局T0に、第m箇所において計測された風速、風向、時刻、温度、位置等のデータを送信する。
基地局T0は、コースRに沿って配置された複数の検出部Tmの内、略中央に配置されている測定部の近傍に配置されている。このような配置関係により、基地局T0と検出部Tmとの間の送受信に用いられる電波強度を低減することができる。
次に、風速測定システム1の機能ブロックの構成について説明する。
図3は、風速測定システム1の構成の一例を示すブロック図である。基地局T0において、端末装置20は、予測部21と、出力制御部22と、記憶部23とを備える。端末装置20には、出力部28が接続されている。予測部21と出力制御部22は、それぞれ、CPU(Central Processing Unit)等のプロセッサがプログラム(ソフトウェア)を実行することで実現される。これらの各機能部のうち一部または全部は、LSI(Large Scale Integration)やASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)等のハードウェアによって実現されてもよいし、ソフトウェアとハードウェアの協働によって実現されてもよい。プログラムは、予めHDD(Hard Disk Drive)やフラッシュメモリなどの記憶装置に格納されていてもよいし、DVDやCD−ROMなどの着脱可能な記憶媒体に格納されており、記憶媒体がドライブ装置に装着されることで記憶部23にインストールされてもよい。
記憶部23は、HDDやフラッシュメモリ、RAM(Random Access Memory)、ROM(Read Only Memory)等の記憶装置である。記憶部23は、各検出部Tmから取得した測定情報24と、後述の予測部21が生成した第1風速情報25とを記憶する。
出力部28は、例えば、LCD(Liquid Crystal Display)や有機EL(Electroluminescence)ディスプレイである。出力部28は、端末装置20と一体のものであったもよい。出力部28は、タッチパッドと一体となったタッチパネルであってもよい。
予測部21は、複数の第1測定部10―mにより測定された測定結果及びGPS装置40−mから取得した複数の第1測定部10―mの位置データ及び時刻データを参照し、第1箇所P1から第m箇所Pmの複数の位置における経時的な風速及び風向のデータを取得する。
予測部21は、第1箇所P1の風速及び風向の情報に基づいて、第1箇所P1における風の風向、風速、及び位置の値を含む風速情報を時刻に対応付けて生成する。予測部21は、同様にして第m箇所Pmのそれぞれの複数の位置における風向及び風速の値を含む風速情報を時刻に対応付けて生成する。予測部21は、例えば、ベルヌイの定理に第1箇所P1から第m箇所Pmの複数の位置における風速を適用して風圧を算出し、風圧情報を時刻に対応付けて生成する。予測部21は、例えば、温度測定部30―mの出力値に基づいて、生成した群速情報、風圧情報、風速情報のそれぞれに対して温度補償を行う。
予測部21は、第1箇所P1における風速情報、風圧情報、位置情報、を含む第1風速情報25を時刻に対応付けて生成する。予測部21は、第1箇所P1と同様に、第m箇所Pmにおける第1風速情報25を時刻に対応して生成する。
予測部21は、生成した複数の位置における複数の第1風速情報25を第1風速情報25に含まれる時刻データを用いて同期し、複数の第1風速情報25を時刻に対応させて比較する。予測部21は、複数の第1風速情報25の比較結果に基づいて、風の風向方向の群速度を算出し、群速情報を生成する。群速度の詳しい算出方法については後述する。予測部21は、算出した群速度に基づいて、任意の位置である予測必要箇所Q1における任意の時刻の風速及び風向を予測する。予測必要箇所Q1は、例えば、コースRの方向に沿って配置された複数の第1測定部10―mの間の任意の位置に設定される(図2参照)。予測必要箇所Q1は、任意の位置(第m箇所Pm)を基準として位置が設定されてもよい。予測部21は、例えば、生成した第1風速情報25と、第1箇所P1と予測必要箇所Q1との間の距離とに基づいて、予測必要箇所Q1における任意の時刻の風速及び風向の予測値を算出する。
出力制御部22は、予測部21により算出された第1箇所や予測必要箇所の風速及び風向やその他の情報を出力部28に出力させる。
検出部Tmにおいて、端末装置20―mは、制御部29−mと、出力制御部22―mとを備える。端末装置20には、第1測定部10−m、出力部28―m、温度測定部30−m、GPS装置40−m、及び送受信部50−mが接続されている。制御部29−mは、第1測定部10−m、温度測定部30−m、及びGPS装置40−mにより計測されたデータを送受信部50−mを介して基地局T0に送信する。表示制御部22−mは、例えば、計測されたデータを出力部28−mに表示させる。
制御部29−mと表示制御部22−mとは、それぞれ、CPU等のプロセッサがプログラム(ソフトウェア)を実行することで実現される。これらの各機能部のうち一部または全部は、LSIやASIC、FPGA等のハードウェアによって実現されてもよいし、ソフトウェアとハードウェアの協働によって実現されてもよい。プログラムは、予めHDDやフラッシュメモリなどの記憶装置に格納されていてもよいし、DVDやCD−ROMなどの着脱可能な記憶媒体に格納されており、記憶媒体がドライブ装置に装着されることで記憶部23にインストールされてもよい。
出力部28―mは、例えば、LCDや有機ELディスプレイである。出力部28は、端末装置20―mと一体のものであったもよい。出力部28―mは、タッチパッドと一体となったタッチパネルであってもよい。
次に、風の群速度について説明する。
図4は、風の群速度について説明する図である。図示するように、所定距離Yの間の空気には、疎密状態があるものとする。疎密状態は、第1箇所において所定時間の間に測定された風速の大きさに関する波形パターン(波束)で表される。例えば、所定距離Yの間で空気に疎密が生じている場合には、疎密が生じている部分の間で空気が移動することによって風速が生じる。従って、所定距離Yの間の疎密状態の中で風速の強弱が生じる。そして、この疎密状態は、風速(疎密)の状態を保った状態で移動する。つまり、空気は、所定距離Yの間の疎密の状態を保ったまま移動方向に移動する。そうすると、位置Aで観測された風速は、t秒後に位置Bにおいて再び観測される。
同様に、ある位置で風の経時的変化が観測された場合、所定時間後に他の位置で同じような風の経時的変化が観測される。この現象を用いると、ある位置で測定した風速及び風向に基づいて、他の位置の任意の時刻の風速及び風向を予測することができる。
空気が疎密状態を維持しながら移動する速度を群速度とすると、第1箇所P1における群速度に基づいて、予測必要箇所Q1の風速及び風向が予測される。群速度は、例えば、第1箇所P1において所定時間の間に測定された風速及び風向と、第m箇所Pmにおいて所定時間の間に測定された風速及び風向とに基づいて算出される。例えば、群速度は、所定単位時間ごとの風の経時的変化(疎密状態)が保たれた状態で、風が移動する速度として算出される。
図5は、風速及び風向の測定実験における測定点を示す図である。図5の例では、複数の測定対象点の(3a)、(6a)、(7a)、(8a)、(9a)に風速計を配置して各点における風速及び風向を同時に測定する。
図6は、複数の測定対象点において所定時間の間に測定された風速及び風向の経時的変化の一例を示す図である。図6(A)の縦軸は風速[m/s]を示し、横軸は時間を示している。図6(B)に示されるように、各測定点における測定結果をそれぞれ縦軸方向にオフセットすると、各測定点で測定された風速及び風向の波形がほぼ同じであり、風は風速及び風向の経時的変化が保たれた状態で移動することが分かる。例えば、(3a)で測定された波形は、(6a)、(7a)、(8a)、(9a)の順に、ほぼ同じ波形が保たれたまま、時間差をもって測定される。
このような理論に基づいて、予測部21は、例えば、複数の検出部Tmにより測定された測定結果に基づいて生成された複数の第1風速情報を参照し、検出部T1において所定方向の風速の変化を時刻に対応付けて経時的にサンプリングして風速の波形を測定する。予測部21は、検出部T1で測定された風速の波形から、検出部Tmで測定された風速の波形と類似する波形を解析的に抽出する。予測部21は、波形を抽出する際に、2つの波形におけるサンプリング点の値が所定の誤差範囲内であれば2つの波形を同一のものと決定してもよい。誤差は、例えば2つの波形におけるサンプリング点の値の誤差を最小二乗法により算出する。予測部21は、複数の検出部Tmの内、任意の2つを選択してもよい。
予測部21は、検出部T1で測定された風速及び風向の波形と検出部Tmで測定された風速及び風向の波形とに基づいて、それぞれの波形の時間差t1を算出する。予測部21は、例えば、それぞれの波形データを所定の間隔でサンプリングし、サンプリングされたデータの誤差が最小となる時間差t1を算出する。予測部21は、第1箇所P1と第m箇所Pmとの間の距離X1とに基づいて群速度Vgを算出する。このとき群速度Vgは、コースRに対する風向のなす角をθとすると、式(1)により算出される。
Vg=X1/(t1cosθ)[m/s]…(1)
Vg=X1/(t1cosθ)[m/s]…(1)
予測部21は、第1箇所P1と第m箇所Pmとの間に位置する予測必要箇所Q1における風速及び風向を予測する。予測部21は、例えば、算出した群速度Vgに基づいて、予測必要箇所Q1における風速及び風向を算出する。
図7は、予測必要箇所Q1における風速及び風向を予測する方法の一例を示す図である。図7の例では、例えば、(1)に第1箇所P1に設定される、(2)に予測必要箇所Q1が設定される。図示するように、風Wが所定の風向で(1)の第1箇所P1を通過すると、第1箇所P1で測定された風速及び風向の経時的変化は、時間差をもって(2)の予測必要箇所Q1において、風速及び風向の経時的変化が保たれた状態で再び測定される。
図7の例では、コースRに沿った方向の風速及び風向は、風の風向に基づいて、コースRに沿った方向の成分(cosθ)を算出することによって得られる。このとき、風の群速度をVg、コースRに沿った方向と風の進行方向とのなす角をθ、第1箇所P1と予測必要箇所Q1との間の距離をXとすると、第1箇所P1における風は、t秒後に予測必要箇所Q1に到達する。このときtは、式(2)により算出される。
t=X/Vgcosθ[s]…(2)
t=X/Vgcosθ[s]…(2)
従って、第1箇所P1、第m箇所Pmで測定された風速及び風向に基づいて、予測必要箇所Q1の風速及び風向が予測される。予測必要箇所Q1の風速は、第1箇所P1で測定された風速及び風向に対して第1箇所の基準の時刻からt[秒]オフセットすることで算出される。
図8は、第1箇所P1と第m箇所Pmとで測定された風Wの波形を示す図である。図8において横軸は時間を表している。縦軸は風速を表している。図8には、第1箇所P1と第m箇所Pmとで測定された風速の経時的変化のそれぞれの測定結果が上下方向に便宜的にオフセットされて表示されている。予測部21は、第1検出部T1と、第m検出部Tmとにより測定された測定結果を参照し、第1検出部T1で測定された風速の波形から、第m検出部Tmで測定された風速の波形と類似する波形を抽出する。予測部21は、波形を抽出する際に、2つの波形におけるサンプリング点の値が所定の誤差範囲内であれば2つの波形を同一のものと決定してもよい。誤差は、例えば2つの波形におけるサンプリング点の値の誤差を最小二乗法により算出する。
予測部21は、第1箇所P1と第m箇所Pmとで測定された風速の波形に基づいて、それぞれの波形の時間差t1を算出する。予測部21は、例えば、それぞれの波形データを所定の間隔でサンプリングし、サンプリングされたデータの誤差が最小となる時間差t1を算出する。
予測部21は、第1箇所P1と第m箇所Pmとの間の距離X1とに基づいて群速度Vgを算出する。このとき群速度Vgは、式(3)により算出される。
Vg=X1/(t1cosθ)[m/s]…(3)
Vg=X1/(t1cosθ)[m/s]…(3)
予測部21は、第1箇所P1と第m箇所Pmとの間に位置する予測必要箇所Q1における風速及び風向を予測する。予測部21Aは、例えば、算出した群速度Vgに基づいて、予測必要箇所Q1における風速及び風向を算出する。第1箇所P1で計測された風速及び風向は、t秒後に予測必要箇所Q1に到達するので、式(2)に基づいて、予測必要箇所Q1の風速及び風向が算出される。
例えば、第1箇所P1から20[m]離れた位置に予測必要箇所Q1を設定する。風の群速度が20[m/s]と算出され、ある時点において第1箇所P1での風速が5[m/s]と測定された場合、予測必要箇所Q1では1[s]後に風速5[m/s]の風が測定される。
予測部21は、算出結果を予測情報として出力制御部22に出力する。出力制御部22は、予測情報に基づいて、出力部28に予測必要箇所Q1の風速及び風向を出力する。図7の例では、同様にして、第1箇所P1から離間した任意のコースR上の位置(例えば、(3)から(6))の位置における風速及び風向は、群速度Vgと第1箇所P1からの距離に基づいて、予測することができる。但し、上記の予測方法は、測定対象の位置が平地であり、壁等の風に影響を与える要因が無いことを前提とする。
次に、風速測定システム1を用いた風速及び風向の測定方法について説明する。
図9は、風速測定システム1を用いた風速及び風向の測定方法の一例を示すフローチャートである。まず、作業者は、端末装置20のプログラムを起動する(ステップS100)。次に、作業者は、測定対象点であるコースR上の複数の第m箇所Pmの位置にマーカを付ける(ステップS102)。次に、作業者は、マーカを目印として複数の第m箇所Pm上にGPS装置40を設置する(ステップS104)。次に、作業者がGPS装置40―mを作動させると、GPS装置40―mは、複数の第m箇所Pmの位置を測定する(ステップS106)。次に、作業者は、複数の第m箇所Pm上に複数の第1測定部10―mを設置(ステップS108)。次に、作業者は、複数の第1測定部10−mを作動させ、複数の第m箇所Pmにおける風速及び風向を測定する(ステップS110)。
次に、予測部21は、複数の第1測定部10−mにより測定された複数の第m箇所Pmの風速及び風向の情報に基づいて、第1風速情報25を生成する(ステップS112)。次に、予測部21は、生成した第1風速情報25に基づいて、複数の第m箇所Pmの間の任意の位置における予測必要箇所Q1の風速及び風向を予測する(ステップS114)。次に、出力制御部22は、予測情報に基づいて、予測結果を出力部28に出力する(ステップS116)。次に、予測部21は、第m箇所Pmにおける測定が終了したか否かを判定する(ステップS118)。
ステップS1118で否定的な結果を得た場合、予測部21は、所定のタイミングでステップS110に処理を戻し、ステップS110からステップS118の処理を繰り返し、予測必要箇所Q1における風速及び風向の経時的変化を予測する。ステップS118で肯定的な判定を得た場合、予測部21は、処理を終了する。
上述したように第1実施形態によれば、風速測定システム1は、風速及び風向の測定により、任意の位置及び時刻の風速及び風向を予測することができる。この結果、風速測定システム1によれば、装置構成及び測定方法を簡略化することができる。
<第2実施形態>
第1実施形態では、複数の検出部Tmにおいて測定された風速及び風向に基づいて基地局T0が予測必要箇所の風速及び風向を予測した。第2実施形態では、基地局T0を設けることなく、測定部が第1箇所P1と、第2箇所とにおいて測定された風速に基づいて予測必要箇所の風速及び風向を予測する。以下の説明では、第1実施形態と同一の構成については同一の名称及び符号を用い、重複する説明については適宜省略する。
第1実施形態では、複数の検出部Tmにおいて測定された風速及び風向に基づいて基地局T0が予測必要箇所の風速及び風向を予測した。第2実施形態では、基地局T0を設けることなく、測定部が第1箇所P1と、第2箇所とにおいて測定された風速に基づいて予測必要箇所の風速及び風向を予測する。以下の説明では、第1実施形態と同一の構成については同一の名称及び符号を用い、重複する説明については適宜省略する。
図10及び図11は、第2実施形態の風速測定システム1Aの構成の一例を示す図である。第1実施形態における風速測定システム1に比して風速測定システム1Aは、基地局T0が設けられておらず、測定部において第2測定部12を更に備える。そして、風速測定システム1Aは、端末装置20Aにおいて実行される処理が異なる。
図12は、風速測定システム1Aの風速及び風向の測定原理を説明する図である。図示するように、風速測定システム1Aでは、第1箇所P1と距離X2離間した位置(例えば、(6)の位置)に第2箇所P2が設置される。予測部21Aは、第2測定部12の測定結果を取得する。
予測部21Aは、第1測定部10と、第2測定部12とにより測定された測定結果に基づいて、解析的に風Wの群速度を算出する。図13は、第1測定部10と、第2測定部12とにより測定された風Wの波形を示す図である。図13において横軸は時間を表している。縦軸は風速を表している。
図13には、第1測定部10と、第2測定部12とにより測定された風速の経時的変化のそれぞれの測定結果が上下方向に便宜的にオフセットされて表示されている。予測部21Aは、第1測定部10と、第2測定部12とにより測定された測定結果を参照し、第1測定部10で測定された風速の波形から、第2測定部12で測定された風速の波形と類似する波形を抽出する。
予測部21Aは、抽出された第1測定部10で測定された風速の波形と第2測定部12で測定された風速の波形とに基づいて、それぞれの波形の時間差t2を算出する。予測部21Aは、第1箇所P1と第2箇所P2との間の距離X2とに基づいて群速度Vgを算出する。予測部21Aは、第1実施形態と同様に、式(2)、(3)に基づいて、第1箇所P1と第2箇所P2との間に位置する予測必要箇所Q1における風速及び風向を予測する。予測部21Aは、例えば、算出した群速度Vgに基づいて、予測必要箇所Q1における風速及び風向を算出する。
第1箇所P1で測定された風の疎密状態は、第2箇所P2に到達するまでに変化する可能性がある。予測部21Aは、比較対象となる第1測定部10で測定された風速の波形と第2測定部12で測定された風速の波形において、サンプリング点における風速に誤差がある場合、サンプリング点における風速の平均値を風速としてもよい。
図12に戻り、第1箇所P1で測定される風速の値は、第2箇所P2で測定される風速の時間軸上での将来の値と近似する。
予測部21Aは、第1箇所P1における第1風速情報25を生成することに加え、第2箇所P2における第2風速情報を生成し、第1風速情報25と第2風速情報26とのそれぞれに基づいて、予測必要箇所の風速を予測してもよい。このとき、第1風速情報25と第2風速情報26とのそれぞれに基づいて、予測された予測必要箇所の風速のそれぞれの値が異なる場合、平均値を予測必要箇所の風速としてもよい。
次に、風速測定システム1Aを用いた風速及び風向の測定方法について説明する。
図14は、風速測定システム1Aを用いた風速及び風向の測定方法の工程の一例を示すフローチャートである。ステップS200からステップS208は、第1実施形態のステップS100からステップS108と同様である。ステップS208の後、作業者は、測定対象点であるコースR上の第1箇所P1から離間した第2箇所P2にマーカを付ける(ステップS210)。
次に、作業者は、マーカを目印として第2箇所P2上にGPS装置40を設置する(ステップS212)。次に、作業者は、GPS装置40を作動させ、第2箇所P2の位置を測定する(ステップS214)。次に、作業者は、第2箇所P2上に第2測定部12を設置する(ステップS216)。次に、作業者は、第1測定部10を作動させ、第1箇所P1における風速及び風向を測定する(ステップS218)。次に、作業者は、第1測定部10と同時に第2測定部12を作動させ、第2箇所P2における風速及び風向を測定する(ステップS220)。
次に、予測部21は、第1測定部10により測定された第1箇所P1の風速及び風向の情報と、第2測定部12により測定された第2箇所P2の風速及び風向の情報とに基づいて、風の群速度を算出する(ステップS222)。次に、予測部21は、算出した群速度に基づいて、第1箇所P1と第2箇所P2との間に位置する予測必要箇所Q1の予測必要箇所Q1の風速及び風向を予測する(ステップS224)。次に、出力制御部22は、予測情報に基づいて、予測結果を出力部28に出力する(ステップS226)。次に、予測部21は、第1箇所P1における測定が終了したか否かを判定する(ステップS228)。
ステップS228で否定的な結果を得た場合、予測部21は、所定のタイミングでステップS218に処理を戻し、ステップS218からステップS228の処理を繰り返し、予測必要箇所Q1における風速の経時的変化を予測する。ステップS228で肯定的な判定を得た場合、予測部21は、処理を終了する。
上述したように第2実施形態によれば、風速測定システム1Aは、2箇所で風速及び風向を測定して予測必要箇所Q1の風速を時間軸上における過去のデータと未来のデータの両方に基づいて予測するため、装置構成を簡略化すると共に風速の予測を、より正確に行うことができる。
[ハードウェア構成]
上述した実施形態の風速測定システム1の端末装置20は、例えば、図15に示すようなハードウェアの構成により実現される。図15は、実施形態の端末装置20のハードウェア構成の一例を示す図である。
上述した実施形態の風速測定システム1の端末装置20は、例えば、図15に示すようなハードウェアの構成により実現される。図15は、実施形態の端末装置20のハードウェア構成の一例を示す図である。
制御部は、通信コントローラ20−1A、CPU20−2A、RAM20−3A、ROM20−4A、フラッシュメモリやHDDなどの二次記憶装置20−5A、およびドライブ装置20−6Aが、内部バスあるいは専用通信線によって相互に接続された構成となっている。ドライブ装置20−6Aには、光ディスクなどの可搬型記憶媒体が装着される。二次記憶装置20−5Aに格納されたプログラム20−5aがDMAコントローラ(不図示)などによってRAM20−3に展開され、CPU20−2Aによって実行されることで、制御部が実現される。CPU20−2Aが参照するプログラムは、ドライブ装置20−6Aに装着された可搬型記憶媒体に格納されていてもよいし、ネットワークNWを介して他の装置からダウンロードされてもよい。
上記実施形態は、以下のように表現することができる。
記憶装置と、
前記記憶装置に格納されたプログラムを実行するハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサは、前記プログラムを実行することにより、
第1箇所において測定された風速及び風向に基づいて第1風速情報を生成し、
生成させた前記第1風速情報に基づいて、前記第1箇所以外から所定距離離間した予測必要箇所の風速及び風向を予測し、
予測した予測情報を出力部に出力する、
風速測定システム。
記憶装置と、
前記記憶装置に格納されたプログラムを実行するハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサは、前記プログラムを実行することにより、
第1箇所において測定された風速及び風向に基づいて第1風速情報を生成し、
生成させた前記第1風速情報に基づいて、前記第1箇所以外から所定距離離間した予測必要箇所の風速及び風向を予測し、
予測した予測情報を出力部に出力する、
風速測定システム。
本発明を実施するための形態について実施形態を用いて説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
1、1A‥風速測定システム、10−m‥第1測定部、12‥第2測定部、15、60―m‥三脚、20、20−m、20−A‥端末装置、20−1A‥通信コントローラ、20−2A‥CPU、20−3A‥RAM、20−4A‥ROM、20−5A‥二次記憶装置、20−5a‥プログラム、20−6A‥ドライブ装置、21、21A‥予測部、22、22−m‥出力制御部、23‥記憶部、24‥測定情報、25‥第1風速情報、26‥第2風速情報、28、28−m‥出力部、30―m‥温度測定部、40−m‥GPS装置、50、50−m‥送受信部、C1、C2、C3‥ケーブル、M‥車両、NW‥ネットワーク、P1‥第1箇所、P2‥第2箇所、Pm‥、第m箇所、Q1‥予測必要箇所、R‥コース
Claims (9)
- 複数の位置における風速及び風向を測定する複数の測定部と、
前記複数の測定部により測定された前記風速及び前記風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部と、
前記予測部により予測された予測情報を出力する出力部と、
を備える風速測定システム。 - 前記第1風速情報は、前記複数の測定部により測定された前記風速及び前記風向に基づいて導出された風の群速度を含み、
前記予測部は、前記第1風速情報と、前記複数の位置の内の第1箇所から前記予測必要箇所までの距離とに基づいて、前記予測必要箇所における風速及び風向を予測する、
請求項1に記載の風速測定システム。 - 前記予測部は、前記複数の箇所において所定時間の間に測定された前記風速及び前記風向の大きさに関する波形パターンが移動する速度に基づいて、前記群速度を導出する、
請求項2に記載の風速測定システム。 - 第1箇所の風速及び風向を測定する第1測定部と、前記第1箇所と離間した第2箇所の風速及び風向を測定する第2測定部を更に有し、
前記予測必要箇所は、前記第1箇所と前記第2箇所との間の箇所であり、
前記予測部は、前記第1測定部により測定された風速及び風向と前記第2測定部により測定された風速及び風向とに基づいて、前記予測必要箇所の風速及び風向を予測する、
請求項1から3のうちいずれか1項に記載の風速測定システム。 - 前記複数の測定部のぞれぞれは、位置データを計測すると共に、計測時の時刻データを取得するGPS装置を更に備え、
前記測定部は、測定した前記風速及び前記風向と、前記GPS装置から取得した前記位置データ及び前記時刻データとを含む前記第1風速情報を生成し、
前記予測部は、前記複数の測定部のそれぞれから取得した複数の前記第1風速情報を前記第1風速情報に含まれる前記時刻データに基づいて時刻で同期し、任意の位置における予測必要箇所の風速及び風向を予測する、
請求項1から4のうちいずれか1項に記載の風速測定システム。 - 前記複数の測定部からデータを取得する基地局を更に備え、
前記基地局は、所定方向に沿って配置された前記複数の測定部に対して略中央の位置に配置されている、
請求項1から5のうちいずれか1項に記載の風速測定システム。 - 複数の位置において測定された風速及び風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測する予測部と、
前記予測部により予測された風速及び風向に関する情報を出力する出力部と、を備える、
風速測定装置。 - 複数の位置に風速及び風向を測定するための複数の測定部を設置し、
前記複数の測定部により前記複数の箇所における風速及び風向を測定し、
コンピュータが、前記複数の測定部により測定された前記風速及び前記風向に基づいて第1風速情報を生成し、生成した前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測し、
予測された予測情報を出力する、
風速測定方法。 - コンピュータに、
複数の位置において測定された風速及び風向に基づいて第1風速情報を生成させ、
生成させた前記第1風速情報に基づいて、前記複数の位置の間の任意の位置における予測必要箇所の風速及び風向を予測させ、
予測された予測情報を出力部に出力させる、
プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018007569A JP2019128147A (ja) | 2018-01-19 | 2018-01-19 | 風速測定システム、風速測定装置、風速測定方法、及びプログラム |
| CN201910034223.2A CN110058045A (zh) | 2018-01-19 | 2019-01-14 | 风速测定系统、风速测定装置、风速测定方法及存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018007569A JP2019128147A (ja) | 2018-01-19 | 2018-01-19 | 風速測定システム、風速測定装置、風速測定方法、及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019128147A true JP2019128147A (ja) | 2019-08-01 |
Family
ID=67315976
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018007569A Pending JP2019128147A (ja) | 2018-01-19 | 2018-01-19 | 風速測定システム、風速測定装置、風速測定方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2019128147A (ja) |
| CN (1) | CN110058045A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116678641B (zh) * | 2023-06-07 | 2026-01-02 | 中通客车股份有限公司 | 一种车辆测试期间的风速补偿方法及系统 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120173191A1 (en) * | 2011-01-03 | 2012-07-05 | Moeller Lothar B | Airspeed And Velocity Of Air Measurement |
| CN103389388B (zh) * | 2012-05-08 | 2015-08-19 | 华锐风电科技(集团)股份有限公司 | 风电场风速预测方法及其装置和功率预测方法及其系统 |
| JP3179566U (ja) * | 2012-08-26 | 2012-11-08 | 株式会社バイオスシステム | 走行車両の風向風速測定システム |
-
2018
- 2018-01-19 JP JP2018007569A patent/JP2019128147A/ja active Pending
-
2019
- 2019-01-14 CN CN201910034223.2A patent/CN110058045A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN110058045A (zh) | 2019-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Alam et al. | A DSRC Doppler-based cooperative positioning enhancement for vehicular networks with GPS availability | |
| US8655372B2 (en) | Determining positions in a wireless radio system | |
| Hu et al. | Measuring air quality in city areas by vehicular wireless sensor networks | |
| JP5125962B2 (ja) | 位置検出装置、位置検出システム、位置検出方法およびプログラム | |
| EP2446294B1 (en) | Method and system for determining the location of a moving sensor node | |
| Chen et al. | Vehicle localization and velocity estimation based on mobile phone sensing | |
| JP5792412B1 (ja) | ロケーション判定システム | |
| CN105183800A (zh) | 信息预测的方法和装置 | |
| KR101234177B1 (ko) | 사용자 단말의 위치 측정 방법 | |
| JP6470647B2 (ja) | ロケーション判定方法 | |
| EP3076128B1 (en) | Backtracking indoor trajectories using mobile sensors | |
| KR20230020385A (ko) | 초정밀 객체-포지셔닝 시스템 및 이를 이용한 자기 위치 측정 방법 | |
| JP6551969B2 (ja) | 位置測定装置、位置測定方法、プログラム、および位置測定システム | |
| KR20160090199A (ko) | 무선 신호를 이용한 실내 위치 측정 장치 및 방법 | |
| KR20060096729A (ko) | 개인 항법 시스템 및 개인 항법 시스템에서 경로 안내 방법 | |
| JP2019128147A (ja) | 風速測定システム、風速測定装置、風速測定方法、及びプログラム | |
| JP2015224969A (ja) | 携帯電子機器、制御方法、及びプログラム | |
| Magnani et al. | Self-organized, scalable GPS-free localization of wireless sensors | |
| Kaya et al. | A battery-friendly data acquisition model for vehicular speed estimation | |
| KR101161097B1 (ko) | 분실 디바이스 추적 방법, 장치 및 시스템 | |
| CN104215990B (zh) | 一种基于无线网络单节点的辅助gps定位方法和系统 | |
| CN101136678B (zh) | 一种用于移动台定位业务的定位数据处理方法及装置 | |
| US20250343744A1 (en) | Systems and methods for location accuracy estimation over a wireless network | |
| RU2583157C2 (ru) | Способ определения местоположения подвижных объектов | |
| Lunar et al. | Crashing Waves: An Empirical Vehicle-to-Barrier Communication Channel Model via Crash Tests |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200303 |