JP2019140776A - 回転電機制御装置、回転電機制御方法 - Google Patents
回転電機制御装置、回転電機制御方法 Download PDFInfo
- Publication number
- JP2019140776A JP2019140776A JP2018021337A JP2018021337A JP2019140776A JP 2019140776 A JP2019140776 A JP 2019140776A JP 2018021337 A JP2018021337 A JP 2018021337A JP 2018021337 A JP2018021337 A JP 2018021337A JP 2019140776 A JP2019140776 A JP 2019140776A
- Authority
- JP
- Japan
- Prior art keywords
- rotating electrical
- electrical machine
- frequency
- current
- diaphragm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K9/00—Devices in which sound is produced by vibrating a diaphragm or analogous element, e.g. fog horns, vehicle hooters or buzzers
- G10K9/12—Devices in which sound is produced by vibrating a diaphragm or analogous element, e.g. fog horns, vehicle hooters or buzzers electrically operated
- G10K9/13—Devices in which sound is produced by vibrating a diaphragm or analogous element, e.g. fog horns, vehicle hooters or buzzers electrically operated using electromagnetic driving means
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/40—Regulating or controlling the amount of current drawn or delivered by the motor for controlling the mechanical load
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/50—Reduction of harmonics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/17—Circuit arrangements for detecting position and for generating speed information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Multimedia (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
Description
(2)の構成によれば、高トルクの場合に、力強さをイメージする音を出すことができる。
(3)の構成によれば、高いトルクかつ加速時に、大きい音を出すことで、高揚感を演出することができる。
(5)の構成によれば、ロードノイズ、風切り音にかき消されない音量を確保ことができる。
(6)、(7)の構成によれば、音を発生させるために電力を消費することなく、回転電機の回転によって、人にとって心地よい感覚を得ることができる音を発生させることができる。
回転電機1は、例えばハイブリッド自動車や電気自動車のような車両に搭載される走行用モータである。図1に示すように、回転電機1は、ハウジング2、ステータ10、ロータ20、シャフト4、および音発生装置30を備えている。
ステータコア11は、軸方向に延在する円筒状に形成されている。ステータコア11は、例えば電磁鋼板を軸方向に複数枚積層することにより形成されている。
ロータコア21は、軸方向に一様に延在する円筒状に形成され、ステータコア11の内周面11a(図2参照)に対向配置されている。ロータコア21は、例えば電磁鋼板を軸方向に複数枚積層することにより形成されている。ロータコア21の内側には、シャフト4が挿入され、圧入などにより固定されている。これにより、ロータコア21は、シャフト4と一体となって、軸線C回りに回転可能になっている。
取付ボルト37は、例えば仕切壁27のボス28に締結されている。よって、取付ブラケット31は、仕切壁27のボス28に取付ボルト37で取り付けられる。仕切壁27は、ハウジング2の内部に配置されている。
図2は、本実施形態に係る回転電機1のステータ10およびロータ20を軸線に対して交差する方向に破断した断面図である。図3は、図2のIII部を拡大した状態を示す断面図である。
複数の磁石23のうち、隣接する3個の磁石23A,磁石23B,磁石23Cは、軸線C方向から見てV字状に配置されている。
隣接する3個の磁石23A,磁石23B,磁石23Cは、ロータコア21の周方向に交互に異なる磁極となるようにロータコア21内に磁極として埋設されている。
以下、一対の第1非同一形状部51,第1非同一形状部52のうち、第1非同一形状部51について詳しく説明して、第1非同一形状部52についての詳しい説明を省略する。
ここで、第1非同一形状部51は、軸線Cから径方向外側に延びる直線C27上に配置されている。直線C27は、軸線Cと、磁極(すなわち、3個の磁石23A,磁石23B,磁石23C)の周方向の中心とを結ぶ直線である。第1非同一形状部51の周方向の中心が軸線C上に配置されている。
一対の第1非同一形状部51,第1非同一形状部52は、周方向の極毎に設定された電磁領域の繰返し形状と異なるように形成されている。一対の第1非同一形状部51,第1非同一形状部52は、ロータコア21の周方向に均等に配置されている。
ステータコア11は、一対の第2非同一形状部53(非同一形状部),第2非同一形状部54(非同一形状部)を有する。
ロータコア21の一対の第1非同一形状部51,第1非同一形状部52と、ステータコア11の一対の第2非同一形状部53,第2非同一形状部54により音発生機構が構成されている。
以下、一対の第2非同一形状部53,第2非同一形状部54のうち、第2非同一形状部53について詳しく説明して、第2非同一形状部54についての詳しい説明を省略する。
一対の第2非同一形状部53,第2非同一形状部54は、周方向の極毎に設定された電磁領域の繰返し形状と異なるように形成されている。一対の第2非同一形状部53,第2非同一形状部54は、ステータコア11の周方向に均等に配置されている。
回転電機1は、上述したように、ロータコア21の外周面21aに、一対の第1非同一形状部51,第1非同一形状部52が周方向に対して均等の間隔で形成されている。また、ステータコア11の内周面11aに、一対の第2非同一形状部53,第2非同一形状部54が周方向に対して均等の間隔で形成されている。

この結果、本実施形態の回転電機1は、運転者にとって高揚感や心地よい感覚を得ることができるモータ音を発生することができる。
また、本実施形態では、一対の第1非同一形状部51,第1非同一形状部52や一対の第2非同一形状部53,第2非同一形状部54を凹状に形成することにより、ロータコア21およびステータコア11間の間隙を、第1非同一形状部51,第1非同一形状部52や第2非同一形状部53,第2非同一形状部54に対応させて調整する必要がない。
これにより、本実施形態では、回転電機1のコストを抑えた状態で、回転電機1に一対の第1非同一形状部51,第1非同一形状部52および一対の第2非同一形状部53,第2非同一形状部54を形成することができる。
さらに本実施形態では、以下に説明する音発生装置30の構成を用いて、回転電機1に発生するトルクに応じて、基本音に音を追加する。
これにより、本実施形態によれば、回転電機1で発生する基本音に、異なる次数を混ぜることで軽快で心地よい音を発生させることができる。
図5は、図1のII部を拡大した断面図である。図6は、本発実施形態に係る回転電機の音発生装置30を示す断面図である。図7は、本実施形態に係る回転電機1を示す斜視図である。なお、本実施形態では、図5〜図7に示す構成の音発生装置30を、漏れ磁束デバイスともいう。
具体的には、例えば、第1支え基部44に第1振動板33の基端部がインサート成形により一体に取り付けられている。第1振動板33は、第1支え基部44の第1対向面44aからステータコア11の内周面11aに向けて延びるように延在されている。第1振動板33は、例えば一対の平坦面33aで平板状に加工され、平面視において矩形状に形成された電磁鋼板(金属片)である。第1振動板33は、第1対向面44aから先端33bまでの長さ寸法がL1に形成されている。
さらに、第1振動板33は、一対の平坦面33aが径方向に対して交差(直交)するように配置されている。さらに、第2振動板34は、一対の平坦面34aが径方向に対して交差(直交)するように配置されている。また、第3振動板35は、一対の平坦面35aが径方向に対して交差(直交)するように配置されている。
また、第1振動板33、第2振動板34、および第3振動板35は、ステータコア11の軸方向に延びて、ステータコア11の周方向に並んで配置されている。
よって、第1振動板33の先端33b、第2振動板34の先端34b、および第3振動板35の先端35bは、ステータコア11の内周面11aに対して同じ距離に配置されている。すなわち、第1振動板33、第2振動板34および第3振動板35は、ステータコア11の内周面11aに対して同一の距離に隣接して配置されている。
さらに、第1振動板33、第2振動板34および第3振動板35は、外部に漏れた磁束で加振しやすいように、平板状の平坦面33a,34a,35aを磁束に対して交差する方向を向けて配置されている。
よって、外部に漏れた磁束による電磁力により、第1振動板33、第2振動板34、および第3振動板35を、それぞれ加振させて振動させることができる。
さらに、第1振動板33、第2振動板34、および第3振動板35の長さ寸法L1,L2,L3を相互に異ならせることにより、例えば第1振動板33、第2振動板34、および第3振動板35それぞれの振動周波数(共振周波数)を変えることができる。これにより、第1振動板33、第2振動板34、および第3振動板35の振動により発生する音で、モータ音の音色を微妙に調整できる。
図8は、本実施形態に係る回転電機1の回転数と音発生装置30によって発生する音の周波数主成分との関係例を示す図である。図8において、横軸は重畳する周波数、左の縦軸は回転電機1の回転数である。また、右の縦軸は音圧を表す。
符号g12が示す領域は、例えば回転数が2000〜6000rpmかつ周波数が150Hz以上の領域であり、人が軽快(スポーティ感)を感じる領域である。
符号g13が示す領域は、例えば回転数が2000〜4000rpmかつ周波数が150Hz以下の領域であり、音の成分によって人が力強さ(迫力感)を感じる領域である。
図9は、本実施形態に係る回転電機制御装置100の構成例を示す図である。図9に示すように、回転電機制御装置100は、センサ101、制御部110、電源121、および回転電機1を備える。センサ101は、車速センサ102、アクセルポジションセンサ103、およびトルクセンサ104を備える。制御部110は、モータ制御部111、および電源制御部112を備える。なお、回転電機制御装置100は、車両に搭載されている。
アクセルポジションセンサ103は、アクセル・ペダルの踏み込み量と踏み込み速度を検出し、検出した検出結果を制御部110に出力する。
トルクセンサ104は、回転電機1の発生トルクを検出し、検出した検出結果を制御部110に出力する。
図10は、本実施形態に係る制御部110が行う制御例を示すフローチャートである。
さらに、本実施形態では、車速に応じて、高調波電流の振幅を制御部110が調整する。この理由は、ロードノイズ、風切り音にかき消されない音量を確保ためである。
また、本実施形態では、車速に応じて、高調波電流の周波数を制御部110が上げていく。この理由は、車速に連動した音色に調整するためである。
次に、回転電機1に電流を重畳した場合のトルクリプルへの影響を検討した結果を説明する。
図11は、回転電機1に電流を重畳した場合のトルクリプルへの影響を検討した結果を説明するための図である。図11において、横軸は時間、縦軸は電流である。
また、時刻0〜t3がロータ20の1回転に相当する。波形g101は、回転電機1の回転時の電流波形である。波形g102は、重畳する電流波形である。
また、重畳する電流(以下、重畳電流ともいう)I’は、次式(4)式のように表される。
また、磁石の磁束Bは、次式(5)のように表される。
ロータ20の回転によって発生する発生トルクTは、磁石の磁束Bに比例する。このため、発生トルクTは、次式(6)のように表される。
符号g111は、36次波による成分を表す。また、符号g112は、72次波による成分を表す。なお、基本電流の周波数は、36次波の1/6の周波数である。
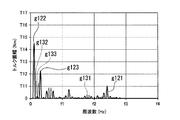
図13は、基本電流の周波数の1/2の周波数を重畳した場合のトルクリプルの周波数成分例と、基本電流の周波数の約1/6の周波数を重畳した場合のトルクリプルの周波数成分例を示す図である。図13において、横軸は周波数、縦軸はトルク振幅である。
符号g121は、基本電流の周波数の1/2の周波数を重畳した場合のトルクリプルの周波数成分を表す。また、符号g131は、基本電流の周波数の1/6の周波数を重畳した場合のトルクリプルの周波数成分を表す。
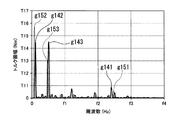
図14は、基本電流の周波数の1.5倍の周波数を重畳した場合のトルクリプルの周波数成分例と、基本電流の周波数の約1.33倍の周波数を重畳した場合のトルクリプルの周波数成分例を示す図である。図14において、横軸は周波数、縦軸はトルク振幅である。
符号g141は、基本電流の周波数の1.5倍の周波数を重畳した場合のトルクリプルの周波数成分を表す。また、符号g151は、基本電流の周波数の約1.33倍の周波数を重畳した場合のトルクリプルの周波数成分を表す。
図15は、加速感を表す音の波形例を示す図である。図15において、横軸は電気角であり、縦軸は電流である。
また、波形g161は、基本電流の波形を表す。波形g162は、重畳電流の波形を表す。波形g163は、合成電流の波形を表す。符号g164は、基本電流の1周気分を表す。
なお、図15において、基本電流の電流値が約I3〜−I3に対して、重畳電流の電流値は、約1/3の約I1〜−I1である。上述したように、重畳電流の振幅は、車速に応じて制御部110が調整する。
図16は、加速感を表す音の波形例を示す図である。図16において、横軸は電気角であり、縦軸は電流である。
また、波形g171は、基本電流の波形を表す。波形g172は、重畳電流の波形を表す。波形g173は、合成電流の波形を表す。符号g174は、基本電流の1周気分を表す。
図16において、基本電流の電流値が約I3〜−I3に対して、重畳電流の電流値は、基本電流の電流値と同等の約I3〜−I3がそれ以上である。
また、本実施形態では、加速度が閾値Y以上のときに、第1周波数以上かつ第2周波数未満の高調波電流を重畳する。これにより、本実施形態によれば、高いトルクかつ加速時に、大きい音を出すことで、高揚感を演出することができる。
また、本実施形態では、車速に応じて、高調波電流の振幅を制御部110が調整する。これにより、本実施形態によれば、ロードノイズ、風切り音にかき消されない音量を確保ことができる。
さらに、本実施形態では、車速に応じて、高調波電流の周波数を制御部110が上げていく。これにより、本実施形態によれば、車速に連動した音色に調整することができる。
また、本実施形態では、漏れ磁束デバイスの振動板を漏れ磁束によって振動させることで多様な周波数の音を演出することができる。さらに本実施形態では、回転電機1に、トルク、加速度、速度(車速)に応じて、電流を重畳することで、漏れ磁束デバイスによって発生する音の周波数を制御することができる。これにより、本実施形態によれば、車両の走行状態に応じて、回転電機1の回転を利用して、乗員に心地よい音を発生させることができる。この結果、本実施形態によれば、車両が回転電機1を備える車両であっても、単調なモータ音でなく、エンジンを搭載している車両で乗員が馴染んでいる音を演出することができる。
Claims (8)
- 回転電機と、
前記回転電機の状態を検出するセンサと、
前記センサが検出した結果に基づいて、前記回転電機に供給する電流に重畳する電流成分を制御する制御部と、
を備える回転電機制御装置。 - 前記制御部は、前記センサが検出した結果に含まれるトルクがトルク閾値以上の場合に、前記回転電機に第1周波数未満の電流を重畳する、請求項1に記載の回転電機制御装置。
- 前記制御部は、前記センサが検出した結果に含まれる加速度が加速度閾値以上の場合に、前記回転電機に第1周波数以上かつ第2周波数以下の電流を重畳する、請求項2に記載の回転電機制御装置。
- 前記制御部は、前記センサが検出した結果に含まれる車両の速度が車速閾値以上の場合に、前記回転電機に第1周波数以上かつ第2周波数以下の電流を重畳する、請求項1または請求項2に記載の回転電機制御装置。
- 前記制御部は、前記センサが検出した結果に含まれる車両の速度が車速閾値以上の場合に、前記車両の速度に応じて重畳する電流の振幅を調整する、請求項4に記載の回転電機制御装置。
- ステータコアにコイルが装着され、前記コイルに通電することにより磁束を発生するステータと、
前記ステータコアに振動板が隣接して設けられ、前記磁束による電磁力で前記振動板が振動することにより所定の音を発生する音発生装置と、
を備える、請求項1から請求項5のいずれか1項に記載の回転電機制御装置。 - ロータコアに磁石が装着されたロータと、
ステータコアにコイルが装着されたステータと、を備え、
前記ロータコアの外周面および前記ステータコアの内周面の両方に、
周方向の極毎に設定された電磁領域の繰返し形状とは異なる非同一形状部が設けられている、請求項1から請求項6のいずれか1項に記載の回転電機制御装置。 - 回転電機を有する回転電機制御装置の回転電機制御方法であって、
センサが、前記回転電機の状態を検出する手順と、
制御部が、前記センサによって検出された結果に基づいて、前記回転電機に供給する電流に重畳する電流成分を制御する手順と、
を含む回転電機制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018021337A JP6648172B2 (ja) | 2018-02-08 | 2018-02-08 | 回転電機制御装置、回転電機制御方法 |
| CN201910088674.4A CN110138166B (zh) | 2018-02-08 | 2019-01-29 | 旋转电机控制装置和旋转电机控制方法 |
| US16/261,612 US10862411B2 (en) | 2018-02-08 | 2019-01-30 | Rotating electrical machine control device and rotating electrical machine control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018021337A JP6648172B2 (ja) | 2018-02-08 | 2018-02-08 | 回転電機制御装置、回転電機制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019140776A true JP2019140776A (ja) | 2019-08-22 |
| JP6648172B2 JP6648172B2 (ja) | 2020-02-14 |
Family
ID=67476170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018021337A Expired - Fee Related JP6648172B2 (ja) | 2018-02-08 | 2018-02-08 | 回転電機制御装置、回転電機制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10862411B2 (ja) |
| JP (1) | JP6648172B2 (ja) |
| CN (1) | CN110138166B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022523900A (ja) * | 2019-03-18 | 2022-04-27 | ベバスト エスエー | 車両屋根部品を駆動するために使用される電気モータを用いて音を発生させる方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010023768A1 (ja) * | 2008-08-28 | 2010-03-04 | 日産自動車株式会社 | 車両の作動音制御装置及び制御方法 |
| JP2011055697A (ja) * | 2009-08-03 | 2011-03-17 | Hisashi Takahashi | 有音化制御したモータ機構及び電気自動車 |
| JP2012115092A (ja) * | 2010-11-26 | 2012-06-14 | Denso Corp | インバータ制御装置および車両 |
| JP2012228138A (ja) * | 2011-04-22 | 2012-11-15 | Toyota Motor Corp | 車両駆動装置 |
| JP2014168998A (ja) * | 2013-03-01 | 2014-09-18 | Sumitomo Electric Ind Ltd | 電力変換装置 |
| JP2016063650A (ja) * | 2014-09-18 | 2016-04-25 | 株式会社東芝 | 永久磁石型回転電機 |
| JP2017520444A (ja) * | 2014-04-29 | 2017-07-27 | エルエス オートモーティブ コーポレーション | エコカーの作動サウンド発生装置およびこの制御方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4449035B2 (ja) * | 2004-03-10 | 2010-04-14 | 日立オートモティブシステムズ株式会社 | 電動車両用の永久磁石回転電機 |
| US8212505B2 (en) * | 2008-12-02 | 2012-07-03 | GM Global Technology Operations LLC | Method and system for creating a vibration in an automobile |
| DE102010019502B4 (de) * | 2010-05-06 | 2023-03-23 | Bühler Motor GmbH | Pumpe mit integriertem elektronisch kommutierten Gleichstrommotor |
| JP2013162556A (ja) * | 2012-02-01 | 2013-08-19 | Suzuki Motor Corp | 電動回転機 |
-
2018
- 2018-02-08 JP JP2018021337A patent/JP6648172B2/ja not_active Expired - Fee Related
-
2019
- 2019-01-29 CN CN201910088674.4A patent/CN110138166B/zh not_active Expired - Fee Related
- 2019-01-30 US US16/261,612 patent/US10862411B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010023768A1 (ja) * | 2008-08-28 | 2010-03-04 | 日産自動車株式会社 | 車両の作動音制御装置及び制御方法 |
| JP2011055697A (ja) * | 2009-08-03 | 2011-03-17 | Hisashi Takahashi | 有音化制御したモータ機構及び電気自動車 |
| JP2012115092A (ja) * | 2010-11-26 | 2012-06-14 | Denso Corp | インバータ制御装置および車両 |
| JP2012228138A (ja) * | 2011-04-22 | 2012-11-15 | Toyota Motor Corp | 車両駆動装置 |
| JP2014168998A (ja) * | 2013-03-01 | 2014-09-18 | Sumitomo Electric Ind Ltd | 電力変換装置 |
| JP2017520444A (ja) * | 2014-04-29 | 2017-07-27 | エルエス オートモーティブ コーポレーション | エコカーの作動サウンド発生装置およびこの制御方法 |
| JP2016063650A (ja) * | 2014-09-18 | 2016-04-25 | 株式会社東芝 | 永久磁石型回転電機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022523900A (ja) * | 2019-03-18 | 2022-04-27 | ベバスト エスエー | 車両屋根部品を駆動するために使用される電気モータを用いて音を発生させる方法 |
| JP7241180B2 (ja) | 2019-03-18 | 2023-03-16 | ベバスト エスエー | 車両屋根部品を駆動するために使用される電気モータを用いて音を発生させる方法 |
| US12043098B2 (en) | 2019-03-18 | 2024-07-23 | Webasto SE | Method for using an electric motor to generate sound, said electric motor being employed to drive a vehicle roof component |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110138166A (zh) | 2019-08-16 |
| US20190245462A1 (en) | 2019-08-08 |
| JP6648172B2 (ja) | 2020-02-14 |
| CN110138166B (zh) | 2021-08-06 |
| US10862411B2 (en) | 2020-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Han et al. | Comparative analysis of vibration and noise in IPMSM considering the effect of MTPA control algorithms for electric vehicles | |
| Callegaro et al. | Radial force density analysis of switched reluctance machines: The source of acoustic noise | |
| US8560129B2 (en) | Vibration control device and vehicle | |
| US7170247B2 (en) | Method of control of magnetic sound of alternating current rotating machine | |
| CN103248187A (zh) | 电动旋转机器 | |
| KR102307178B1 (ko) | 모터로 구동되는 차량에서의 승차감 제어 장치 및 방법 | |
| Lu et al. | Comparative study on vibration behaviors of permanent magnet assisted synchronous reluctance machines with different rotor topologies | |
| CN110525364A (zh) | 一种电动汽车主动发声系统及其声音控制方法 | |
| CN110691717A (zh) | 用于产生行驶噪音的方法、声控制器和机动车 | |
| Wu et al. | Modelling, calculation and analysis of electromagnetic force and vibroacoustic behavior of integer-slot permanent magnet synchronous motor considering current harmonics | |
| JP6648172B2 (ja) | 回転電機制御装置、回転電機制御方法 | |
| JP2005117876A (ja) | 交流回転電機装置 | |
| US20050231142A1 (en) | Method of control of magnetic sound of alternating current rotating machine | |
| US4808863A (en) | Active control system and method for reducing engine noise and vibration | |
| JP5440383B2 (ja) | モータ制御装置 | |
| Devillers et al. | Sound quality aspects of electric vehicles | |
| CN114670750A (zh) | 一种用于驱动电机的声浪模拟方法 | |
| JP2019054624A (ja) | 回転電機 | |
| Sun et al. | Vibration control of in-wheel SRM for electric vehicle applications | |
| Chang et al. | Development of the Active Sound Generation Technology using Motor Driven Power Steering System | |
| JPH07177613A (ja) | 電気自動車のモータ制御装置 | |
| Elamin | Acoustic noise mitigation of switched reluctance machines through skewing methods | |
| JP6875967B2 (ja) | 回転電機 | |
| JP5433338B2 (ja) | 車両の作動音制御装置 | |
| CN115556552A (zh) | 配备用于实现能与电动马达相关联的声音的再现装置的道路车辆及相关方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200115 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6648172 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |