JP2019146364A - 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター - Google Patents
圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター Download PDFInfo
- Publication number
- JP2019146364A JP2019146364A JP2018028548A JP2018028548A JP2019146364A JP 2019146364 A JP2019146364 A JP 2019146364A JP 2018028548 A JP2018028548 A JP 2018028548A JP 2018028548 A JP2018028548 A JP 2018028548A JP 2019146364 A JP2019146364 A JP 2019146364A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- region
- drive device
- optical scale
- piezoelectric drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 112
- 239000000463 material Substances 0.000 claims description 64
- 239000011347 resin Substances 0.000 claims description 46
- 229920005989 resin Polymers 0.000 claims description 46
- 238000009434 installation Methods 0.000 claims description 36
- 239000000853 adhesive Substances 0.000 claims description 26
- 239000000758 substrate Substances 0.000 claims description 26
- 230000001070 adhesive effect Effects 0.000 claims description 25
- 229910052751 metal Inorganic materials 0.000 claims description 23
- 239000002184 metal Substances 0.000 claims description 23
- 229910021421 monocrystalline silicon Inorganic materials 0.000 claims description 14
- 239000013078 crystal Substances 0.000 claims description 13
- 238000005530 etching Methods 0.000 claims description 3
- 238000000059 patterning Methods 0.000 claims description 2
- 238000001514 detection method Methods 0.000 description 21
- 239000004973 liquid crystal related substance Substances 0.000 description 12
- 229910010293 ceramic material Inorganic materials 0.000 description 6
- 239000007769 metal material Substances 0.000 description 6
- 239000000843 powder Substances 0.000 description 5
- 238000005299 abrasion Methods 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000000470 constituent Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 229920001577 copolymer Polymers 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- -1 for example Substances 0.000 description 1
- LNEPOXFFQSENCJ-UHFFFAOYSA-N haloperidol Chemical compound C1CC(O)(C=2C=CC(Cl)=CC=2)CCN1CCCC(=O)C1=CC=C(F)C=C1 LNEPOXFFQSENCJ-UHFFFAOYSA-N 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 239000002923 metal particle Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 238000001579 optical reflectometry Methods 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 239000009719 polyimide resin Substances 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 238000007788 roughening Methods 0.000 description 1
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 description 1
- 229910010271 silicon carbide Inorganic materials 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000003746 surface roughness Effects 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 235000012431 wafers Nutrition 0.000 description 1
Images













Landscapes
- Optical Transform (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【課題】駆動状態の検出を安定して行うことができる圧電駆動装置を提供すること、また、この圧電駆動装置を備えるロボット、電子部品搬送装置、プリンターおよびプロジェクターを提供すること。【解決手段】第1部材と、前記第1部材に対して相対的に移動または回動可能に設けられている第2部材と、前記第1部材に配置されている被駆動部材と、前記第2部材に配置され、前記第1部材を前記第2部材に対して相対的に移動または回動させる駆動力を前記被駆動部材に伝達する圧電アクチュエーターと、前記第1部材および前記第2部材のうちの一方に配置され、基準電位に接続されている導電性の光学パターンを有する光学スケールと、前記第1部材および前記第2部材のうちの他方に配置され、前記光学スケールからの透過光または反射光を受光するセンサーと、を有することを特徴とする圧電駆動装置。【選択図】図6
Description
本発明は、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターに関するものである。
圧電素子を備える圧電アクチュエーターの駆動力により被駆動部材を駆動する圧電駆動装置が知られている。例えば、特許文献1に記載の駆動装置は、固定台と、固定台に対して移動可能に支持された可動体と、可動体に固定された摺動部材と、摺動部材との摩擦により可動体と固定台とを相対移動させる超音波モーターと、を備える。ここで、可動体にはスケールが固定され、固定台にはエンコーダーが固定されており、エンコーダーから出力される変位信号に応じて超音波モーターが制御される。
特許文献1に記載の駆動装置では、超音波モーター駆動時に発生した摩耗粉が静電気力によりスケールに付着し、エンコーダーの位置検出精度を低下させる可能性があるという課題がある。
本発明の適用例に係る圧電駆動装置は、第1部材と、
前記第1部材に対して相対的に移動または回動可能に設けられている第2部材と、
前記第1部材に配置されている被駆動部材と、
前記第2部材に配置され、前記第1部材を前記第2部材に対して相対的に移動または回動させる駆動力を前記被駆動部材に伝達する圧電アクチュエーターと、
前記第1部材および前記第2部材のうちの一方に配置され、基準電位に接続されている導電性の光学パターンを有する光学スケールと、
前記第1部材および前記第2部材のうちの他方に配置され、前記光学スケールからの透過光または反射光を受光するセンサーと、を有する。
前記第1部材に対して相対的に移動または回動可能に設けられている第2部材と、
前記第1部材に配置されている被駆動部材と、
前記第2部材に配置され、前記第1部材を前記第2部材に対して相対的に移動または回動させる駆動力を前記被駆動部材に伝達する圧電アクチュエーターと、
前記第1部材および前記第2部材のうちの一方に配置され、基準電位に接続されている導電性の光学パターンを有する光学スケールと、
前記第1部材および前記第2部材のうちの他方に配置され、前記光学スケールからの透過光または反射光を受光するセンサーと、を有する。
以下、本発明の圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターを添付図面に示す好適な実施形態に基づいて詳細に説明する。
1.圧電駆動装置
<第1実施形態>
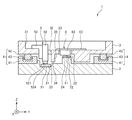
図1は、本発明の第1実施形態に係る圧電駆動装置を示す断面図である。図2は、図1に示す圧電駆動装置をZ軸方向から見た図(一部省略した図)である。図3は、図1に示す圧電駆動装置が備える圧電アクチュエーターの平面図である。図4は、図3に示す圧電アクチュエーターの動作を説明するための図である。
<第1実施形態>
図1は、本発明の第1実施形態に係る圧電駆動装置を示す断面図である。図2は、図1に示す圧電駆動装置をZ軸方向から見た図(一部省略した図)である。図3は、図1に示す圧電駆動装置が備える圧電アクチュエーターの平面図である。図4は、図3に示す圧電アクチュエーターの動作を説明するための図である。
なお、図2では、説明の便宜上、駆動部5および検出部6のそれぞれの一部および第2部材3の図示を省略している。また、以下では、説明の便宜上、互いに直交している3軸であるX軸、Y軸およびZ軸を適宜用いて説明を行う。また、各図において、これらの軸を示す矢印の先端側を「+」、基端側を「−」とする。また、X軸に平行な方向を「X軸方向」、Y軸に平行な方向を「Y軸方向」、Z軸に平行な方向を「Z軸方向」という。また、X軸およびY軸の双方に平行な平面(法線がZ軸方向となる平面)を「XY平面」、X軸およびZ軸の双方に平行な平面(法線がY軸方向となる平面)を「XZ平面」という。Y軸およびZ軸の双方に平行な平面(法線がX軸方向となる平面)を「YZ平面」という。
図1に示す圧電駆動装置1は、第1部材2と、第2部材3と、第2部材3を第1部材2に対してX軸方向に相対的に移動させるように案内する案内機構4と、第2部材3を第1部材2に対してX軸方向に相対的に移動させる駆動部5と、第1部材2に対する第2部材3のX軸方向での相対的な移動を検出する検出部6(エンコーダー)と、を有する。
第1部材2および第2部材3は、それぞれ、例えば、金属材料、セラミックス材料等で構成され、XY平面に沿った略板状の全体形状を有する。また、第1部材2および第2部材3の平面視での外形は、それぞれ、図示では、矩形(四角形)であるが、これに限定されず、例えば、五角形等の他の多角形、円形、楕円形等であってもよい。
ここで、図1に示すように、第1部材2の一方(図1中の上側)の面には、凹部23および凸部24が形成されている。そして、凹部23の底面は、後述する駆動部5の被駆動部材51が設置される設置面21を構成している。また、凸部24の頂面は、後述する検出部6の光学スケール61が設置される設置面22を構成している。なお、凹部23および凸部24は、必要に応じて設ければよく、省略してもよい。
このように、第1部材2の一方(図1中の上側)の面には、凹部23および凸部24が形成されることにより、XY平面に沿った互いに高さの異なる設置面21、22が形成されている。図2に示すように、凹部23は、X軸方向に沿って延びており、これに伴い、設置面21も、X軸方向に沿って延びている。また、凸部24は、X軸方向に沿って延びており、これに伴い、設置面22も、X軸方向に沿って延びている。
図1に示すように、第2部材3の一方(図1中の上側)の面には、第1部材2とは反対側に開放している凹部31が形成されている。また、第2部材3には、凹部31の底面に開口し、第2部材3の厚さ方向(Z軸方向)に貫通している孔32、33が形成されている。孔32には、後述する駆動部5の圧電アクチュエーター52が挿通される。また、孔33には、後述する検出部6のセンサー62が挿通される。
また、第2部材3の他方(図1中の下側)の面には、第1部材2側に向けて突出している構造体34(凸部)が設けられている。この構造体34は、図2に示すように、Z軸方向から見たとき、後述する検出部6の光学スケール61およびセンサー62を全周にわたって囲むように形成されている。ここで、構造体34の内側には、第1部材2側に開放している凹部35が形成されている。この凹部35内には、後述する検出部6の光学スケール61およびセンサー62が収納される。なお、構造体34および凹部35は、必要に応じて設ければよく、省略してもよい。
案内機構4は、直動軸受であり、図1に示すように、前述した第1部材2と第2部材3との間に配置されている。この案内機構4は、1対のスライダー41と、1対のスライダー41に対応して設けられている1対のレール42と、スライダー41とレール42との間に設けられている複数のボール43と、を有する。
1対のレール42は、それぞれ、X軸方向に沿って延びて配置され、第2部材3にネジ等を用いて固定されている。1対のスライダー41は、それぞれ、対応するレール42に沿って移動可能であり、第1部材2に例えばネジ等を用いて固定されている。また、スライダー41、レール42およびボール43は、第1部材2および第2部材3のX軸方向以外の方向での相対的な移動を規制(制限)するように構成されている。なお、スライダー41、レール42およびボール43は、第1部材2および第2部材3のX軸方向での相対的な移動を所定範囲内に規制(制限)するように構成されていてもよい。また、ボール43に代えて、スライダー41とレール42との間で転動するコロを用いてもよい。
駆動部5は、第1部材2に設置されている被駆動部材51と、被駆動部材51に駆動力を伝達する複数(図示では3つ)の圧電アクチュエーター52と、複数の圧電アクチュエーター52を第2部材3に対して支持している複数(図示では3つ)の支持部材53と、を有する。
被駆動部材51は、前述した第1部材2の設置面21上に設置され、例えば接着剤等を用いて第1部材2に固定されている。この被駆動部材51は、板状またはシート状をなし、例えばセラミックス材料等の比較的耐摩耗性の高い材料で構成されている。また、被駆動部材51は、図2に示すように、X軸方向に沿って延びている。
複数の圧電アクチュエーター52は、X軸方向に沿って並んで配置されている。図3に示すように、圧電アクチュエーター52は、振動部521と、支持部522と、これらを接続している1対の接続部523と、振動部521から突出している突出部524と、を有している。
振動部521は、XZ平面に沿った板状をなしている。また、振動部521は、Z軸方向に沿って延びている長手形状をなしている。この振動部521は、振動部521の幅方向(X軸方向)の中央部に振動部521の長手方向に沿って配置されている圧電素子5215と、圧電素子5215に対して振動部521の幅方向の一方側に振動部521の長手方向に沿って配置されている2つの圧電素子5211、5212と、圧電素子5215に対して振動部521の幅方向の他方側に振動部521の長手方向に沿って配置されている2つの圧電素子5213、5214と、を有する。
このような振動部521は、図示しないが、例えば、シリコン基板等の2つの基板と、これらの基板間に配置されているチタン酸ジルコン酸鉛(PZT)等の圧電体と、圧電体の表裏に適宜設けられている複数の電極(より具体的には、圧電素子5211〜5214に対応して一方の面に設けられた複数の個別電極、および、圧電素子5211〜5214に共通して他方の面に設けられた1つの共通電極)と、を有している。ここで、支持部522および1対の接続部523は、それぞれ、例えば、前述した振動部521が有する2つの基板と一体で形成されている2つの基板を有する。また、支持部522は、例えば、前述した振動部521が有する圧電体と同等の厚さを有する絶縁性のスペーサーが当該2つの基板間に介挿されている。
振動部521の長手方向(Z軸方向)での一方(図3中の下側)の端部(先端部)には、その幅方向での中央部に突出部524が突出して設けられている。突出部524は、例えば、セラミックス等の耐摩耗性に優れた材料で構成され、振動部521に接着剤等により接合されている。この突出部524は、振動部521の振動を被駆動部材51へ摩擦摺動により伝達する機能を有する。なお、突出部524の形状は、振動部521の駆動力を被駆動部材51に伝達可能であればよく、図示の形状に限定されない。
支持部材53は、例えば、金属材料、セラミックス材料等で構成され、第2部材3に対して、例えばネジ等を用いて固定されている。また、支持部材53は、前述した支持部522に対し、シリコン製の板バネ等の弾性部材(図示せず)を介して取り付けられている。この弾性部材は、例えば、支持部522に接着剤等により取り付けられ、一方、支持部材53にネジ等を用いて固定されている。
以上のような駆動部5が有する圧電アクチュエーター52は、図示しない回路部から所定周波数の駆動信号が圧電素子5211〜5215に適宜入力されることにより作動する。例えば、圧電素子5211、5214への駆動信号と圧電素子5212、5213への駆動信号との位相差を180°とし、圧電素子5211、5214への駆動信号と圧電素子5215への駆動信号との位相差を−90°〜+90°とすることで、図4に示すように、各圧電素子5211〜5215の伸縮により、振動部521がS字形状に屈曲振動し、これにより、突出部524の先端が図中矢印αで示す方向に楕円運動する。その結果、被駆動部材51は、突出部524から一方向(図中矢印βで示す方向)に駆動力を繰り返し受ける。これにより、第1部材2および第2部材3がX軸方向に相対的に移動する。
なお、図4に示す場合とは逆方向に、第1部材2および第2部材3をX軸方向に相対的に移動させる場合には、前述した駆動信号を180°反転させた駆動信号を用いればよい。
検出部6は、光学式のリニアエンコーダーである。この検出部6は、第1部材2に設置されている光学スケール61と、光学スケール61の移動を検出するセンサー62と、センサー62を第2部材3に対して支持している基板63と、を有する。
光学スケール61は、前述した第1部材2の設置面22上に設置され、例えば接着剤等を用いて第1部材2に固定されている。ここで、光学スケール61は、後述するように導電性の光学パターン72(スケール)を有しており、光学パターン72は、基準電位となる第1部材2に対して電気的に接続されている。これにより、光学スケール61の光学パターン72が帯電するのを低減することができ、その結果、後述する摩耗粉等の異物が光学パターン72に付着するのを低減することができる。なお、光学スケール61については、後に詳述する。
センサー62は、図示しないが、光学スケール61に光を照射する半導体レーザー等の発光素子と、光学スケール61からの反射光を受光するフォトダイオード等の受光素子と、を含んで構成されている。
基板63は、例えば、配線基板であり、ネジ等を用いて第2部材3に固定されている。この基板63は、第2部材3の凹部31側の面上に設置され、センサー62を支持するとともに、センサー62に電気的に接続されている。ここで、基板63は、センサー62が前述した孔33に挿通されるように、センサー62が設置されている面を第1部材2側に向けて配置されている。
以上のような検出部6では、第1部材2に対する第2部材3のX軸方向での相対的な移動状態(位置、移動速度等)に応じて、センサー62の受光素子の出力信号の波形が変化する。したがって、この受光素子の出力信号に基づいて、第1部材2に対する第2部材3のX軸方向での相対的な移動状態を検出することができる。
(光学スケールの詳細な説明)
図5は、図1に示す圧電駆動装置が備える光学スケールの平面図である。図6は、図5に示す光学スケールの断面図である。図7は、図5に示す光学スケールの他の設置例を示す断面図である。
図5は、図1に示す圧電駆動装置が備える光学スケールの平面図である。図6は、図5に示す光学スケールの断面図である。図7は、図5に示す光学スケールの他の設置例を示す断面図である。
図5に示す光学スケール61は、板状をなす基材71を有し、その一方の面には、光学スケール61のX軸方向での移動量、移動速度等を検出し得るパターンとして、X軸方向に沿って第1領域721および第2領域722を交互に並べた光学パターン72が形成されている。
ここで、光学パターン72の第1領域721および第2領域722は、それぞれ、平面視で、Y軸方向に沿って延びている。また、平面視で、第1領域721および第2領域722の幅がそれぞれY軸方向にわたって一定となっている。また、基材71の平面視での形状は、X軸方向を長辺とする長方形となっている。
本実施形態の光学スケール61は、図6に示すように、板状(円板状)の基材71と、基材71の上面上にパターニングされて設けられている樹脂層73と、これらを覆うように設けられている金属膜74と、を有し、平面視で樹脂層73が設けられている領域が第1領域721を構成し、平面視で第1領域721同士の間であって樹脂層73が設けられていない領域が第2領域722を構成している。したがって、金属膜74の樹脂層73と重なる部分の上面が第1領域721の表面であって反射面741を構成している。また、金属膜74の樹脂層73と重ならない部分の上面が第2領域722の表面であって反射面742を構成している。
基材71の一方(図6中上側)の面には、複数の凸部711が設けられている。各凸部711は、ピラミッド状(四角錘状)をなしており、基材71の板面に対して傾斜角度θで傾斜した4つの傾斜面711aを有する。この傾斜角度θは、金属膜74の反射面742が反射面741と異なる方向に光を反射することができればよく、特に限定されないが、例えば、後述するように基材71を単結晶シリコンで構成した場合、約55°(理論値)である。なお、本実施形態では、複数の凸部711は、基材71の一方の面の全域にわたって配置されているが、これに限定されず、例えば、樹脂層73の直下の領域では凸部711を省略してもよい。ただし、複数の凸部711を基材71の一方の面の全域にわたって配置することで、複数の凸部711を形成する際、その形成領域の位置決め等が不要となり、簡便であるという利点がある。
また、図示では、複数の凸部711は、互いに大きさが等しく、かつ、規則的に配置されているが、互いに大きさが異なっていてもよく、また、ランダムに配置されていてもよい。また、各凸部711は、平面視で四角形をなしており、複数の凸部711は、平面視での向きが揃っている。ここで、複数の凸部711は、平面視で、いかなる方向を向いていてもよいが、本実施形態では、複数の第2領域722間で互いに同じ方向を向いている。
このような基材71は、いかなる材料で構成されていてもよいが、単結晶シリコン、シリコンカーバイト、水晶等の異方性エッチングが可能な結晶材料で構成されていることが好ましい。これにより、前述したような傾斜面711aを簡単かつ高精度に形成することができる。そして、結晶材料の結晶面である傾斜面711aを利用して第2領域722の反射面742(第2面)を形成することができる。
また、基材71は、導電性を有することが好ましい。これにより、基材71を介して光学パターン72を基準電位に接続することができる。なお、基材71が絶縁性である場合、光学パターン72を基準電位に接続するため、基材71の表面に金属膜等を設けて導電性を付与するか、または、光学パターン72を基準電位に接続する配線を設ければよい。
また、基材71に用いる結晶材料は、単結晶シリコンであることが好ましい。単結晶シリコンは、他の結晶材料に比べて安価であり、高精度な加工が容易である。そのため、光学スケール61の基材71が単結晶シリコンで構成されていることで、光学スケール61の低コスト化および高精度化が容易に図れるという利点がある。また、単結晶シリコン基板は、導電性を有する。そのため、単結晶シリコン基板を基材71に用いることにより、基材71を介して光学パターン72と第1部材2とを電気的に接続することができる。この点、安価な単結晶シリコン基板は、不純物を含んでおり、純粋な単結晶シリコン基板に比べて導電性が高いため、基材71として好適である。
特に、基材71に用いる単結晶シリコンの面方位は、(100)であることが好ましい。これにより、[100]面を使用することで、第2領域722に形成される構造体を正四角錘とすることができる。また、このような単結晶シリコンを用いることで、リニアエンコーダーだけでなく、後述する第3実施形態のようにロータリーエンコーダーに適した光学スケール61を形成することができる。また、単結晶シリコンを用いて形成した光学スケール61の第2領域722で反射してセンサー62の受光部で受光される光の量は、センサー62の光源部からの光の光量に対して3%以下とすることができる。
このように基材71が異方性エッチング可能な結晶材料で構成されている場合、金属膜74の反射面742(第2面)は、基材71に用いる結晶材料の結晶面(傾斜面711a)に沿って設けられていることが好ましい。これにより、反射面741(第1面)に対する傾斜角度θのバラつきの少ない反射面742(第2面)を容易に形成することができる。
樹脂層73は、基材71の一方(図6中上側)の面上に配置されている。本実施形態では、前述したように基材71の一方の面の全域にわたって複数の凸部711が配置されているため、樹脂層73の直下には、複数の凸部711がある。この樹脂層73は、平面視で第1領域721の形状に対応した形状をなしている。また、樹脂層73の上面は、基材71の板面に沿った平坦面となっている。なお、図6に示す断面において、樹脂層73の側面は、樹脂層73の上面に対して直交しているが、樹脂層73の上面に対して傾斜していてもよく、その場合、反射面741の幅を規定しやすいという観点から、樹脂層73の幅が基材71側に向けて小さくなるように側面が形成されていることが好ましい。
このような樹脂層73は、感光性樹脂を用いて構成されている。かかる感光性樹脂としては、特に限定されず、例えば、感光性を有するポリイミド樹脂、エポキシ樹脂またはこれらのコポリマー等が挙げられる。また、かかる感光性樹脂は、ポジ型またはネガ型のいずれでもよいが、樹脂層73の上面と側面とからなる角部を直角または鋭角することで反射面741の寸法精度を高くすることができるという観点と環境信頼性の観点から、ネガ型であることが好ましい。このように、かかる感光性樹脂がネガ型であることで、感光性樹脂がポジ型である場合に比べて、高精度な第1領域721の形成が容易となる。なお、樹脂層73の構成材料には、前述した感光性樹脂以外の材料、例えば、フィラー、顔料、各種添加剤等が含まれていてもよい。
また、樹脂層73の厚さt1は、前述した凸部711の高さhよりも大きいことが好ましい。これにより、樹脂層73の直下に複数の凸部711が設けられていても、反射面741の平坦性を高めることができる。特に、樹脂層73の厚さt1および凸部711の高さhの比t1/hは、2以上12以下であることが好ましく、2以上10以下であることがより好ましく、2以上4以下であることがさらに好ましい。これにより、基材71上に樹脂層73を形成する際、複数の凸部711上に樹脂層73を形成する場合であっても、当該複数の凸部711の形状の影響を受け難くすることができ、CMP(chemical mechanical polishing)等の平坦化処理を行わなくても、平坦な表面を有する樹脂層73を形成することができる。
金属膜74は、基材71上および樹脂層73上に配置されている。この金属膜74の上面(基材71とは反対側の面)は、前述したように、第1領域721および第2領域722の表面を構成する。本実施形態では、金属膜74は、樹脂層73上だけでなく、基材71の樹脂層73が配置されていない部分上にも配置されているが、金属膜74と基材71とを電気的に接続することができれば、基材71上には金属膜74が配置されていなくてもよい。この場合、基材71の表面(より具体的には凸部711の傾斜面711a)が第2領域722の表面を構成する。ただし、第2領域722の表面に金属膜74が配置されていることにより、基材71の構成材料によらず、第2領域722の光の反射率を高めることができ、前述したような第2領域722の所望の反射特性を得やすい。また、本実施形態では、金属膜74は、樹脂層73の上面上だけでなく、樹脂層73の側面上にも配置されているが、樹脂層73の側面上には金属膜74が配置されていなくてもよい。
このような金属膜74の構成材料としては、反射面741、742が所望の反射特性を得られればよく、各種金属材料を用いることができるが、例えば、アルミニウム、銅、鉄、ニッケル、チタン、タングステンなどの金属またはこれらを含む合金(複合材料)が挙げられる。金属膜74の厚さt2(膜厚)は、特に限定されないが、10nm以上1000nm以下が好ましく、20nm以上50nm以下がより好ましい。
以上のように、光学スケール61は、光学パターン72が設けられている板状の基材71を有する。ここで、光学パターン72は、基材71上に感光性樹脂をパターニングした樹脂層73が設けられている領域である第1領域721と、基材71上の樹脂層73が設けられていない領域である第2領域722と、が交互に並んでいる。また、第1領域721の表面は、基材71の厚さ方向を法線とする第1面である反射面741を主体に構成されている。一方、第2領域722の表面は、反射面741に対して傾斜している第2面である反射面742を主体に構成されている。そして、第1領域721および第2領域722のそれぞれの表面には、金属膜74が設けられている。
ここで、「第1領域721が反射面741(第1面)を主体に構成されている」とは、平面視で第1領域721内における反射面741(第1面)の面積占有率が50%以上(好ましくは70%以上、より好ましくは90%以上)であることを言う。また、「第2領域722が反射面742(第2面)を主体に構成されている」とは、平面視で第2領域722内における反射面742(第2面)の面積占有率が50%以上(好ましくは70%以上、より好ましくは90%以上)であることを言う。また、第2領域722は、反射面741と同様に基材71の厚さ方向を法線とする面を含んでいてもよいが、その場合、平面視で、第2領域722内における当該面の面積占有率が第1領域721内における反射面741(第1面)の面積占有率よりも小さければよい。
このような光学スケール61によれば、第1領域721が基材71の厚さ方向を法線とする反射面741を主体に構成され、第2領域722が反射面741に対して傾斜している反射面742を主体に構成されているため、第1領域721および第2領域722で反射した光の方向を互いに異ならせ、第1領域721で反射した光のみを選択的にセンサー62の受光部で受光することができる。そのため、基材71を透明材料で構成する必要がなく、基材71の材料選択の自由度を高めることができ、その結果、より安価でかつ加工性に優れた材料を用いることができる。また、第1領域721に光が照射されている状態とそうでない状態とのセンサー62の受光部での受光量の差を大きくすることができ、その結果、検出精度を高めることができる。より具体的には、第1領域721に光が照射されている状態でのセンサー62の受光部の受光量をセンサー62の光源部からの光の光量に対して57%以上とし、第2領域722に光が照射されている状態でのセンサー62の受光部の受光量をセンサー62の光源部からの光の光量に対して5%以下とすることができる。
これに対し、例えば、仮に第2領域722が第1領域721(反射面741)の法線と平行な法線の平坦面で構成されている場合、当該平坦面に光の反射を低減する処理(例えば、光を散乱させるために主に曲面を組み合わせて構成されている凹凸面とする粗面化、光吸収率を高める黒色化等)を施したとしても、第2領域722での反射率を十分(5%以下)に小さくすることが難しい。そのため、第2領域722にセンサー62の光源部からの光が照射されている状態において、第2領域722で反射してセンサー62の受光部に入射する光の量を十分に小さくすることができない。
また、光学スケール61によれば、第1領域721が有する樹脂層73が、基材71上にパターニングされて配置され、感光性樹脂を含んで構成されているため、フォトリソグラフィ法を用いて第1領域721を高精度に形成することができる。そして、第1領域721が有する金属膜74(反射面741の部分)が、樹脂層73上に配置され、金属材料で構成されているため、第1領域721の光反射性を高めることができる。このように、第1領域721が樹脂層73および金属膜74を有することにより、この点でも、検出精度を高めることができる。
なお、光学スケール61は、光学パターン72が導電性を有していればよく、前述した構成に限定されず、例えば、金属板上に光学パターンを形成したものであってもよい。
以上のような光学スケール61は、前述した第1部材2の設置面22上に設置されており、設置面22に対して接着剤25により固定されている。すなわち、光学スケール61の基材71と設置面22との間には、接着剤25が介在しており、この接着剤25の接着力により、光学スケール61が設置面22に対して固定されている。また、第1部材2は、導電性を有し、基準電位(例えばグランド電位)に接続されている。
ここで、光学スケール61の基材71は、設置面22に対して部分的に接触している。これにより、基材71と第1部材2とが電気的に接続されている。本実施形態では、設置面22には、複数の凸部221が設けられており、凸部221の先端が基材71に接触している。
このように、第1部材2または第2部材3(本実施形態では第1部材2)は、光学スケール61が設置される設置面22を有し、設置面22は、凸部221を有する。これにより、設置面22に光学スケール61を接着剤25により接合しても、設置面22と光学スケール61とを接触させやすくすることができる。そして、設置面22と光学スケール61とを接触させることで、光学スケール61と第1部材2とを電気的に接続することができる。また、設置面22には、複数の凸部221の存在に伴って凹部222が設けられており、凹部222は、接着剤25の逃げを許容する逃げ部を構成している。また、このような凸部221および凹部222は、アンカー効果により接着剤25の接着力を高める機能も有する。このような凸部221および凹部222は、例えば、プラスト処理、エッチング、機械加工等により形成することができる。また、このような凸部221および凹部222を有する設置面22の表面粗さRaは、特に限定されないが、0.01μm以上1000μm以下であることが好ましい。
接着剤25としては、光学スケール61と第1部材2とを接合することができればよく、特に限定されず、各種接着剤を用いることができるが、エポキシ系、ウレタン系、アクリル系等の接着剤組成物中に金属粒子等の導電性材料を混合した導電性接着剤を用いることが好ましい。すなわち、光学スケール61は、導電性接着剤である接着剤25を介して第1部材2または第2部材3(本実施形態では第1部材2)に接合されていることが好ましい。これにより、光学スケール61を第1部材2または第2部材3(本実施形態では第1部材2)に接合するとともに、接着剤25を介して設置面22と光学スケール61とを電気的に接続することができる。
なお、接着剤25が導電性接着剤である場合、前述したような凸部221および凹部222を省略してもよい。また、図7に示すように、基材71の表面にレジスト膜等の絶縁膜26が設けられている場合には、絶縁膜26の一部を除去し、当該一部を通じて、導電性接着剤である接着剤25を介して基材71と第1部材2とを接合すればよい。
以上のように、圧電駆動装置1は、第1部材2と、第1部材2に対して相対的に移動可能に設けられている第2部材3と、第1部材2に配置されている被駆動部材51と、第2部材3に配置され、第1部材2を第2部材3に対して相対的に移動させる駆動力を被駆動部材51に伝達する圧電アクチュエーター52と、第1部材2および第2部材3のうちの一方(本実施形態では第1部材2)に配置され、基準電位に接続されている導電性の光学パターン72を有する光学スケール61と、第1部材2および第2部材3のうちの他方(本実施形態では第2部材3)に配置され、光学スケール61からの透過光または反射光を受光するセンサー62と、を有する。
このような圧電駆動装置1によれば、光学スケール61の光学パターン72が導電性を有し基準電位に接続されているため、光学パターン72が帯電することを低減することができる。そのため、被駆動部材51と圧電アクチュエーター52とが接触する領域で発生する摩耗粉が光学パターン72に付着することを低減することができる。その結果、駆動状態の検出を安定して行うことができる。
<第2実施形態>
図8は、本発明の第2実施形態に係る圧電駆動装置を示す断面図である。図9は、図8に示す圧電駆動装置をZ軸方向から見た図(一部省略した図)である。なお、以下の説明では、本実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図8および図9において、前述した実施形態と同様の構成については、同一符号を付している。
図8は、本発明の第2実施形態に係る圧電駆動装置を示す断面図である。図9は、図8に示す圧電駆動装置をZ軸方向から見た図(一部省略した図)である。なお、以下の説明では、本実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図8および図9において、前述した実施形態と同様の構成については、同一符号を付している。
図8に示す圧電駆動装置1Aは、第1部材8と、第2部材9と、第2部材9を第1部材8に対してZ軸に平行な軸線aZまわりに相対的に回動可能に支持している軸受4Aと、第2部材9を第1部材8に対して軸線aZまわりに相対的に回動させる駆動部5Aと、第1部材8に対する第2部材9の軸線aZまわりの相対的な回動を検出する検出部6A(エンコーダー)と、を有する。
ここで、第1部材8および第2部材9の軸線aZまわりの相対的な回動の角度範囲は、360°以下の所定の角度以下に制限されていてもよいし、360°以上であってもよい。この角度範囲が360°以上である場合、すなわち、第1部材8および第2部材9が軸線aZまわりに相対的に回転可能である場合、圧電駆動装置1Aを回転型の圧電モーターとして用いることができる。
第1部材8および第2部材9は、それぞれ、例えば、金属材料、セラミックス材料等で構成されている。図9に示すように、第1部材8の平面視での外形は円形であり、第2部材9の平面視での外形は矩形(四角形)であるが、これらの外形は、これに限定されない。
ここで、図8に示すように、第1部材8の一方(図8中の上側)の面には、凹部83および凸状の構造体86が形成されている。そして、凹部83の底面は、後述する駆動部5Aの被駆動部材54が設置される設置面81を構成している。構造体86は、凹部83の外周を囲むように環状をなしている。そして、構造体86の外側であって、第1部材8の一方(図8中の上側)の面には、後述する検出部6Aの光学スケール64が設置される設置面82が設けられている。なお、凹部83および構造体86は、必要に応じて設ければよく、省略してもよい。
このように、第1部材8の一方(図8中の上側)の面には、凹部83が形成されることにより、互いに高さの異なる設置面81、82が形成されている。また、第1部材8には、凹部83の底面に開口し、軸線aZを中心として第1部材8の厚さ方向(Z軸方向)に貫通している孔84が形成されている。図9に示すように、凹部83および孔84の外形は、それぞれ、Z軸方向から見たとき(以下、「平面視」ともいう)、軸線aZを中心とする円形をなしている。これに伴い、設置面81は、平面視で、軸線aZを中心とする円環状をなしている。また、設置面82は、平面視で、軸線aZを中心とする円環状をなしている。
また、図8に示すように、第1部材8の外周面85には、幅(径)が小さい縮径部851と、縮径部851に対して+Z軸方向側において縮径部851よりも幅(径)が大きい拡径部852と、を有する。なお、第1部材8の平面視での外形は、図示では、円形であるが、これに限定されず、例えば、四角形、五角形等の他の多角形、楕円形等であってもよい。また、孔84は、必要に応じて設ければよく、省略してもよい。
図8に示すように、第2部材9の一方(図8中の上側)の面には、第1部材8側に開放している凹部91と、第1部材8とは反対側に開放している凹部92と、凹部91、92の両底面に開口して第2部材9を厚さ方向(Z軸方向)に貫通している孔93と、が形成されている。凹部91は、平面視で、円形をなしており、この凹部91内には、前述した第1部材8が挿入されている。
軸受4Aは、図8に示すように、前述した第1部材8と第2部材9との間に配置されている。この軸受4Aは、内輪44と、外輪45と、これらの間に設けられている複数のボール46と、を有する。
内輪44は、前述した第1部材8の外周面85(縮径部851)に嵌合して固定されている。外輪45は、前述した第2部材9の凹部91の内周面に嵌合して固定されている。また、内輪44、外輪45およびボール46は、第1部材8および第2部材9の軸線aZまわりの回動方向以外の方向での相対的な移動を規制(制限)するように構成されている。なお、ボール46に代えて、内輪44と外輪45との間で転動するコロを用いてもよい。
駆動部5Aは、図8に示すように、第1部材8に設置されている被駆動部材54と、被駆動部材54に駆動力を伝達する複数(図9では3つ)の圧電アクチュエーター52と、複数の圧電アクチュエーター52を第2部材3に対して支持している複数(3つの)の支持部材55と、を有する。
被駆動部材54は、前述した第1部材8の設置面81上に設置され、例えば接着剤等を用いて第1部材8に固定されている。また、被駆動部材54は、図9に示すように、平面視で、軸線aZを中心とする円環状をなしている。ここで、被駆動部材54は、前述した被駆動部材51と同様、板状またはシート状をなし、例えばセラミックス材料等の比較的耐摩耗性の高い材料で構成されている。なお、被駆動部材54の平面視形状は、図示の形状(環状)に限定されず、例えば、圧電駆動装置1Aの可動範囲によっては、周方向での一部が欠損していてもよい。
複数の支持部材55は、複数の圧電アクチュエーター52に対応して設けられ、複数の圧電アクチュエーター52が軸線aZを中心とする同一円周上に沿って並ぶように配置されている。そして、各支持部材55は、支持部522(図3参照)および第2部材9のそれぞれに対して、例えばネジ等を用いて固定されている。ここで、支持部材55は、前述した支持部材53と同様、例えば、金属材料、セラミックス材料等で構成されている。なお、駆動部5Aの複数の圧電アクチュエーター52の配置は、図示の配置に限定されず、例えば、軸線aZを中心とする同一円周上に等角度間隔に並んでいなくてもよい。
以上のような駆動部5Aの圧電アクチュエーター52は、前述した駆動部5の圧電アクチュエーター52と同様に作動することで、被駆動部材54に駆動力を与え、第1部材8および第2部材9を軸線aZまわりに相対的に回動させる。
検出部6Aは、第1部材8に設置されている光学スケール64と、光学スケール64の移動を検出するセンサー62と、センサー62を第2部材9に対して支持している基板(図示せず)と、を有する。
光学スケール64は、前述した第1部材8の設置面82上に設置され、例えば接着剤等を用いて第1部材8に固定されている。この光学スケール64は、前述した光学スケール61と同様に構成することができる。ここで、光学スケール64は、前述した第1実施形態の光学スケール61と同様、導電性の光学パターン(図示せず)を有しており、当該光学パターンは、基準電位となる第1部材8に対して電気的に接続されている。これにより、光学スケール64の光学パターンが帯電するのを低減することができ、その結果、後述する摩耗粉等の異物が当該光学パターンに付着するのを低減することができる。ただし、光学スケール64の光学パターンは、第1領域と第2領域とが軸線aZまわりの周方向に沿って交互に並んでいる。また、光学スケール64は、平面視で、軸線aZを中心とする円環状をなしている。なお、光学スケール64の平面視形状は、図示の形状(環状)に限定されず、例えば、圧電駆動装置1Aの可動範囲によっては、周方向での一部が欠損していてもよい。
以上のような検出部6Aでは、第1部材8に対する第2部材9の軸線aZまわりの相対的な回動状態(回動位置、角速度等)に応じて、センサー62の受光素子の出力信号の波形が変化する。したがって、この受光素子の出力信号に基づいて、第1部材8に対する第2部材9の軸線aZまわりの相対的な回動状態を検出することができる。
以上のように、圧電駆動装置1Aは、第1部材8と、第1部材8に対して相対的に回動可能に設けられている第2部材9と、第1部材8に配置されている被駆動部材54と、第2部材9に配置され、第1部材8を第2部材9に対して相対的に回動させる駆動力を被駆動部材54に伝達する圧電アクチュエーター52と、第1部材8および第2部材9のうちの一方(本実施形態では第1部材8)に配置され、基準電位に接続されている導電性の光学パターン75を有する光学スケール64と、第1部材8および第2部材9のうちの他方(本実施形態では第2部材9)に配置され、光学スケール64からの透過光または反射光を受光するセンサー62と、を有する。
このような圧電駆動装置1Aによれば、光学スケール64の光学パターン75が導電性を有し基準電位に接続されているため、光学パターン75が帯電することを低減することができる。そのため、被駆動部材54と圧電アクチュエーター52とが接触する領域で発生する摩耗粉が光学パターン75に付着することを低減することができる。その結果、駆動状態の検出を安定して行うことができる。
<第3実施形態>
図10は、本発明の第3実施形態に係る圧電駆動装置(圧電駆動ユニット)の概略構成を示す斜視図である。なお、以下の説明では、本実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図10において、前述した実施形態と同様の構成については、同一符号を付している。
図10は、本発明の第3実施形態に係る圧電駆動装置(圧電駆動ユニット)の概略構成を示す斜視図である。なお、以下の説明では、本実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図10において、前述した実施形態と同様の構成については、同一符号を付している。
図10に示す圧電駆動装置10は、X軸方向(図中矢印X1で示す方向)、Y軸方向(図中矢印Y1で示す方向)およびZ軸まわり(図中矢印θ1で示す方向)の駆動を行う圧電駆動ユニットである。この圧電駆動装置10は、X軸方向での駆動を行う圧電駆動装置1X(第1圧電駆動装置)と、Y軸方向での駆動を行う圧電駆動装置1Y(第2圧電駆動装置)と、Z軸まわりの駆動を行う圧電駆動装置1θ(第3圧電駆動装置)と、を有し、これらがZ軸方向に沿って並んで連結されている。
ここで、圧電駆動装置1X、1Yは、それぞれ、前述した第1実施形態の圧電駆動装置1である。ただし、圧電駆動装置1YのXY平面内での姿勢は、圧電駆動装置1Xとは90°異なる。ここで、圧電駆動装置1Yの第2部材3は、圧電駆動装置1Xの第1部材2に対して、前述した姿勢となるように、例えばネジ、ボルト/ナット等を用いて固定されている。なお、圧電駆動装置1Yの第2部材3は、圧電駆動装置1Xの第1部材2と一体で構成されていてもよい。
圧電駆動装置1θは、前述した第2実施形態の圧電駆動装置1Aである。ここで、第2部材9には、前述した圧電駆動装置1Yの第1部材2が例えばネジ、ボルト/ナット等を用いて固定されている。なお、第2部材9は、前述した圧電駆動装置1Yの第1部材2と一体で構成されていてもよい。
以上のような第3実施形態によっても、駆動状態の検出を安定して行うことができる。
以上のような第3実施形態によっても、駆動状態の検出を安定して行うことができる。
2.ロボット
次に、本発明のロボットの実施形態について説明する。
次に、本発明のロボットの実施形態について説明する。
図11は、本発明のロボットの実施形態を示す斜視図である。
図11に示すロボット1000は、いわゆる6軸ロボットであり、例えば、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うのに用いられる。
図11に示すロボット1000は、いわゆる6軸ロボットであり、例えば、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うのに用いられる。
ロボット1000は、床や天井に固定されるベース1010と、ベース1010に回動自在に連結されたアーム1020と、アーム1020に回動自在に連結されたアーム1030と、アーム1030に回動自在に連結されたアーム1040と、アーム1040に回動自在に連結されたアーム1050と、アーム1050に回動自在に連結されたアーム1060と、アーム1060に回動自在に連結されたアーム1070と、これらアーム1020、1030、1040、1050、1060、1070の駆動を制御する制御部1080と、を有している。また、アーム1070にはハンド接続部が設けられており、ハンド接続部にはロボット1000に実行させる作業に応じたエンドエフェクター1090が装着される。
また、各関節部のうちの全部または一部には、圧電モーターとして、前述した第2実施形態の圧電駆動装置1Aが搭載されている。この圧電駆動装置1Aの駆動によって各アーム1020、1030、1040、1050、1060、1070が回動する。圧電駆動装置1Aの駆動は、制御部1080によって制御される。
以上のようなロボット1000は、圧電駆動装置1Aを備える。このようなロボット1000によれば、圧電駆動装置1Aが安定した駆動状態の検出結果を用いて高精度な駆動を行うことができる。そのため、このような圧電駆動装置1Aの駆動特性を利用して、ロボット1000の特性を向上させることができる。
3.電子部品搬送装置
次に、本発明の電子部品搬送装置の実施形態について説明する。
次に、本発明の電子部品搬送装置の実施形態について説明する。
図12は、本発明の電子部品搬送装置の実施形態を示す斜視図である。
図12に示す電子部品搬送装置2000は、電子部品検査装置に適用されており、基台2100と、基台2100の側方に配置された支持台2200と、を有している。また、基台2100には、検査対象の電子部品Qが載置されてY軸方向に搬送される上流側ステージ2110と、検査済みの電子部品Qが載置されてY軸方向に搬送される下流側ステージ2120と、上流側ステージ2110と下流側ステージ2120との間に位置し、電子部品Qの電気的特性を検査する検査台2130と、が設けられている。なお、電子部品Qの例として、例えば、半導体、半導体ウェハー、CLDやOLED等の表示デバイス、水晶デバイス、各種センサー、インクジェットヘッド、各種MEMSデバイス等が挙げられる。
図12に示す電子部品搬送装置2000は、電子部品検査装置に適用されており、基台2100と、基台2100の側方に配置された支持台2200と、を有している。また、基台2100には、検査対象の電子部品Qが載置されてY軸方向に搬送される上流側ステージ2110と、検査済みの電子部品Qが載置されてY軸方向に搬送される下流側ステージ2120と、上流側ステージ2110と下流側ステージ2120との間に位置し、電子部品Qの電気的特性を検査する検査台2130と、が設けられている。なお、電子部品Qの例として、例えば、半導体、半導体ウェハー、CLDやOLED等の表示デバイス、水晶デバイス、各種センサー、インクジェットヘッド、各種MEMSデバイス等が挙げられる。
また、支持台2200には、支持台2200に対してY軸方向に移動可能なYステージ2210が設けられており、Yステージ2210には、Yステージ2210に対してX軸方向に移動可能なXステージ2220が設けられており、Xステージ2220には、Xステージ2220に対してZ軸方向に移動可能な電子部品保持部2230が設けられている。
また、電子部品保持部2230は、前述した圧電駆動装置10と、電子部品Qを保持する保持部2233と、を有している。ここで、圧電駆動装置10は、微小な位置決めを行う位置決めユニットとして用いられる。圧電駆動装置10が備える圧電駆動装置1Xの第2部材3は、Xステージ2220に対して固定されている(図10参照)。また、保持部2233は、圧電駆動装置10が備える圧電駆動装置1θの第1部材8に対して固定されている(図10参照)。
以上のような電子部品搬送装置2000は、圧電駆動装置10(1、1A)を備える。このような電子部品搬送装置2000によれば、圧電駆動装置10(1、1A)が安定した駆動状態の検出結果を用いて高精度な駆動を行うことができる。そのため、このような圧電駆動装置10(1、1A)の駆動特性を利用して、電子部品搬送装置2000の特性を向上させることができる。
4.プリンター
図13は、本発明のプリンターの実施形態を示す斜視図である。
図13に示すプリンター3000は、インクジェット記録方式のプリンターである。このプリンター3000は、装置本体3010と、装置本体3010の内部に設けられている印刷機構3020、給紙機構3030および制御部3040と、を備えている。
図13は、本発明のプリンターの実施形態を示す斜視図である。
図13に示すプリンター3000は、インクジェット記録方式のプリンターである。このプリンター3000は、装置本体3010と、装置本体3010の内部に設けられている印刷機構3020、給紙機構3030および制御部3040と、を備えている。
装置本体3010には、記録用紙Pを設置するトレイ3011と、記録用紙Pを排出する排紙口3012と、液晶ディスプレイ等の操作パネル3013とが設けられている。
印刷機構3020は、ヘッドユニット3021と、キャリッジモーター3022と、キャリッジモーター3022の駆動力によりヘッドユニット3021を往復動させる往復動機構3023と、を備えている。ヘッドユニット3021は、インクジェット式記録ヘッドであるヘッド3021aと、ヘッド3021aにインクを供給するインクカートリッジ3021bと、ヘッド3021aおよびインクカートリッジ3021bを搭載したキャリッジ3021cと、を有している。往復動機構3023は、キャリッジ3021cを往復移動可能に支持しているキャリッジガイド軸3023aと、キャリッジモーター3022の駆動力によりキャリッジ3021cをキャリッジガイド軸3023a上で移動させるタイミングベルト3023bと、を有している。
給紙機構3030は、互いに圧接している従動ローラー3031および駆動ローラー3032と、駆動ローラー3032を駆動する給紙モーターである圧電駆動装置1A(圧電モーター)と、を有している。
制御部3040は、例えばパーソナルコンピュータ等のホストコンピュータから入力された印刷データに基づいて、印刷機構3020や給紙機構3030等を制御する。
このようなプリンター3000では、給紙機構3030が記録用紙Pを一枚ずつヘッドユニット3021の下部近傍へ間欠送りする。このとき、ヘッドユニット3021が記録用紙Pの送り方向とほぼ直交する方向に往復移動して、記録用紙Pへの印刷が行なわれる。
以上説明したようなプリンター3000は、圧電駆動装置1Aを備える。このようなプリンター3000によれば、圧電駆動装置1Aが安定した駆動状態の検出結果を用いて高精度な駆動を行うことができる。そのため、このような圧電駆動装置1Aの駆動特性を利用して、プリンター3000の特性を向上させることができる。
5.プロジェクター
図14は、本発明のプロジェクターの実施形態を示す模式図である。
図14は、本発明のプロジェクターの実施形態を示す模式図である。
図14に示すプロジェクター4000は、赤色光を出射する光源4100Rと、緑色光を出射する光源4100Gと、青色光を出射する光源4100Bと、レンズアレイ4200R、4200G、4200Bと、透過型の液晶ライトバルブ(光変調部)4300R、4300G、4300Bと、クロスダイクロイックプリズム4400と、投射レンズ(投射部)4500と、前述した圧電駆動装置10と、を有している。
光源4100R、4100G、4100Bから出射された光は、各レンズアレイ4200R、4200G、4200Bを介して、液晶ライトバルブ4300R、4300G、4300Bに入射する。各液晶ライトバルブ4300R、4300G、4300Bは、入射した光をそれぞれ画像情報に応じて変調する。
各液晶ライトバルブ4300R、4300G、4300Bによって変調された3つの色光は、クロスダイクロイックプリズム4400に入射して合成される。クロスダイクロイックプリズム4400によって合成された光は、投射光学系である投射レンズ4500に入射する。投射レンズ4500は、液晶ライトバルブ4300R、4300G、4300Bによって形成された像を拡大して、スクリーン(表示面)4600に投射する。これにより、スクリーン4600上に所望の映像が映し出される。ここで、投射レンズ4500は、圧電駆動装置10に支持されており、圧電駆動装置10の駆動により位置および姿勢の変更(位置決め)が可能となっている。これにより、スクリーン4600に投射される映像の形状や大きさ等を調整することができる。
なお、上述の例では、光変調部として透過型の液晶ライトバルブを用いたが、液晶以外のライトバルブを用いてもよいし、反射型のライトバルブを用いてもよい。このようなライトバルブとしては、例えば、反射型の液晶ライトバルブや、デジタルマイクロミラーデバイス(Digital Micromirror Device)が挙げられる。また、投射光学系の構成は、使用されるライトバルブの種類によって適宜変更される。また、プロジェクターとしては、光をスクリーン上で走査させることにより、表示面に所望の大きさの画像を表示させる走査型のプロジェクターであってもよい。
以上のように、プロジェクター4000は、圧電駆動装置10(1、1A)を備える。このようなプロジェクター4000によれば、圧電駆動装置10(1、1A)が安定した駆動状態の検出結果を用いて高精度な駆動を行うことができる。そのため、このような圧電駆動装置10(1、1A)の駆動特性を利用して、プロジェクター4000の特性を向上させることができる。
以上、本発明の圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターを、図示の実施形態に基づいて説明したが、本発明は、これに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、各実施形態を適宜組み合わせてもよい。
また、前述した実施形態では圧電駆動装置をロボット、電子部品搬送装置、プリンターおよびプロジェクターに適用した構成について説明したが、圧電駆動装置は、これら以外の各種電子デバイスに適用することができる。また、圧電駆動装置は、プリンターに用いる場合、プリンターの紙送りローラーの駆動源に限定されず、例えば、プリンターのインクジェットヘッドの駆動源等に適用することもできる。
前述した実施形態では、反射型の光学エンコーダーを用いた場合を例に説明したが、透過型の光学エンコーダーを用いてもよい。この場合、センサーが有する発光素子および受光素子は、光学スケールを挟むように配置される。そしては、センサーは、光学スケールからの透過光を受光する。
1…圧電駆動装置、1A…圧電駆動装置、1X…圧電駆動装置、1Y…圧電駆動装置、1θ…圧電駆動装置、2…第1部材、3…第2部材、4…案内機構、4A…軸受、5…駆動部、5A…駆動部、6…検出部、6A…検出部、8…第1部材、9…第2部材、10…圧電駆動装置、21…設置面、22…設置面、23…凹部、24…凸部、25…接着剤、26…絶縁膜、31…凹部、32…孔、33…孔、34…構造体、35…凹部、41…スライダー、42…レール、43…ボール、44…内輪、45…外輪、46…ボール、51…被駆動部材、52…圧電アクチュエーター、53…支持部材、54…被駆動部材、55…支持部材、61…光学スケール、62…センサー、63…基板、64…光学スケール、71…基材、72…光学パターン、73…樹脂層、74…金属膜、75…光学パターン、81…設置面、82…設置面、83…凹部、84…孔、85…外周面、86…構造体、91…凹部、92…凹部、93…孔、221…凸部、222…凹部、521…振動部、522…支持部、523…接続部、524…突出部、711…凸部、711a…傾斜面、721…第1領域、722…第2領域、741…反射面、742…反射面、851…縮径部、852…拡径部、1000…ロボット、1010…ベース、1020…アーム、1030…アーム、1040…アーム、1050…アーム、1060…アーム、1070…アーム、1080…制御部、1090…エンドエフェクター、2000…電子部品搬送装置、2100…基台、2110…上流側ステージ、2120…下流側ステージ、2130…検査台、2200…支持台、2210…Yステージ、2220…Xステージ、2230…電子部品保持部、2233…保持部、3000…プリンター、3010…装置本体、3011…トレイ、3012…排紙口、3013…操作パネル、3020…印刷機構、3021…ヘッドユニット、3021a…ヘッド、3021b…インクカートリッジ、3021c…キャリッジ、3022…キャリッジモーター、3023…往復動機構、3023a…キャリッジガイド軸、3023b…タイミングベルト、3030…給紙機構、3031…従動ローラー、3032…駆動ローラー、3040…制御部、4000…プロジェクター、4100B…光源、4100G…光源、4100R…光源、4200B…レンズアレイ、4200G…レンズアレイ、4200R…レンズアレイ、4300B…液晶ライトバルブ、4300G…液晶ライトバルブ、4300R…液晶ライトバルブ、4400…クロスダイクロイックプリズム、4500…投射レンズ、4600…スクリーン、5211…圧電素子、5212…圧電素子、5213…圧電素子、5214…圧電素子、5215…圧電素子、P…記録用紙、Q…電子部品、X1…矢印、Y1…矢印、aZ…軸線、h…高さ、t1…厚さ、t2…厚さ、α…矢印、β…矢印、θ…傾斜角度、θ1…矢印
Claims (13)
- 第1部材と、
前記第1部材に対して相対的に移動または回動可能に設けられている第2部材と、
前記第1部材に配置されている被駆動部材と、
前記第2部材に配置され、前記第1部材を前記第2部材に対して相対的に移動または回動させる駆動力を前記被駆動部材に伝達する圧電アクチュエーターと、
前記第1部材および前記第2部材のうちの一方に配置され、基準電位に接続されている導電性の光学パターンを有する光学スケールと、
前記第1部材および前記第2部材のうちの他方に配置され、前記光学スケールからの透過光または反射光を受光するセンサーと、を有することを特徴とする圧電駆動装置。 - 前記光学スケールは、前記光学パターンが設けられている板状の基材を有し、
前記光学パターンは、前記基材上に感光性樹脂をパターニングした樹脂層が設けられている領域である第1領域と、前記基材上の前記樹脂層が設けられていない領域である第2領域と、が交互に並んでおり、
前記第1領域の表面は、前記基材の厚さ方向を法線とする第1面を主体に構成され、
前記第2領域の表面は、前記第1面に対して傾斜している第2面を主体に構成され、
前記第1領域および前記第2領域のそれぞれの表面には、金属膜が設けられている請求項1に記載の圧電駆動装置。 - 前記基材は、異方性エッチングが可能な結晶材料で構成されている請求項2に記載の圧電駆動装置。
- 前記結晶材料は、単結晶シリコンである請求項3に記載の圧電駆動装置。
- 前記単結晶シリコンの面方位が(100)である請求項4に記載の圧電駆動装置。
- 前記第2面は、前記結晶材料の結晶面に沿って設けられている請求項3ないし5のいずれか1項に記載の圧電駆動装置。
- 前記基材は、導電性を有する請求項2ないし6のいずれか1項に記載の圧電駆動装置。
- 前記第1部材または前記第2部材は、前記光学スケールが設置される設置面を有し、
前記設置面は、凸部を有する請求項1ないし7のいずれか1項に記載の圧電駆動装置。 - 前記光学スケールは、導電性接着剤を介して前記第1部材または前記第2部材に接合されている請求項1ないし8のいずれか1項に記載の圧電駆動装置。
- 請求項1ないし9のいずれか1項に記載の圧電駆動装置を備えることを特徴とするロボット。
- 請求項1ないし9のいずれか1項に記載の圧電駆動装置を備えることを特徴とする電子部品搬送装置。
- 請求項1ないし9のいずれか1項に記載の圧電駆動装置を備えることを特徴とするプリンター。
- 請求項1ないし9のいずれか1項に記載の圧電駆動装置を備えることを特徴とするプロジェクター。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018028548A JP2019146364A (ja) | 2018-02-21 | 2018-02-21 | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018028548A JP2019146364A (ja) | 2018-02-21 | 2018-02-21 | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019146364A true JP2019146364A (ja) | 2019-08-29 |
Family
ID=67774054
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018028548A Pending JP2019146364A (ja) | 2018-02-21 | 2018-02-21 | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019146364A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021192010A (ja) * | 2020-06-05 | 2021-12-16 | 株式会社ミツトヨ | スケールおよびその製造方法 |
-
2018
- 2018-02-21 JP JP2018028548A patent/JP2019146364A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021192010A (ja) * | 2020-06-05 | 2021-12-16 | 株式会社ミツトヨ | スケールおよびその製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108880324B (zh) | 压电驱动装置、电子部件输送装置、机器人、投影仪 | |
| CN108696180B (zh) | 压电驱动装置、压电电机、机器人及电子部件输送装置 | |
| CN109724635B (zh) | 编码器标尺、编码器标尺的制造方法以及编码器 | |
| US11411512B2 (en) | Control device and method for controlling a piezoelectric drive device using phase difference | |
| US7082832B2 (en) | Sheet material identifying device and image forming apparatus having sheet material identifying device | |
| CN108801303B (zh) | 编码器标尺及其制造方法、编码器、机器人以及打印机 | |
| CN108696178B (zh) | 压电驱动装置、电子部件输送装置、机器人、投影仪 | |
| JP2019146364A (ja) | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| US11205974B2 (en) | Piezoelectric driving device, piezoelectric motor, robot, electronic component conveyance apparatus, printer, and projector | |
| JP2019095316A (ja) | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、プリンターおよびプロジェクター | |
| JP2019068545A (ja) | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| US11430938B2 (en) | Piezoelectric driving device having a detection element at the center of a vibrating portion | |
| US20080225418A1 (en) | Methods and systems for improving optical flatness in a path length control driver | |
| JP2019146435A (ja) | 圧電駆動装置、圧電アクチュエーターの制御方法、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JPWO2020184238A1 (ja) | 光学制御装置および、これを含むヘッドアップディスプレイ装置 | |
| US20190128707A1 (en) | Optical Scale, Encoder, Robot, Electronic-Component Conveying Apparatus, Printer, And Projector | |
| JP2018185191A (ja) | 電子部品搬送装置、検査装置およびロボット | |
| JP2019160975A (ja) | 圧電アクチュエーター、圧電アクチュエーターの付加力検出方法、圧電アクチュエーターの共振状態検出方法、圧電駆動装置、ハンド、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2019117853A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2019146365A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181121 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200807 |