JP2019175280A - エアステージ装置、サーボ装置 - Google Patents
エアステージ装置、サーボ装置 Download PDFInfo
- Publication number
- JP2019175280A JP2019175280A JP2018064834A JP2018064834A JP2019175280A JP 2019175280 A JP2019175280 A JP 2019175280A JP 2018064834 A JP2018064834 A JP 2018064834A JP 2018064834 A JP2018064834 A JP 2018064834A JP 2019175280 A JP2019175280 A JP 2019175280A
- Authority
- JP
- Japan
- Prior art keywords
- pressure chamber
- fixed guide
- spaces
- slider
- fluid pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 claims abstract description 41
- 238000006073 displacement reaction Methods 0.000 claims abstract description 21
- 238000005192 partition Methods 0.000 claims abstract description 11
- 238000013459 approach Methods 0.000 claims description 7
- 230000000903 blocking effect Effects 0.000 claims description 2
- 238000000638 solvent extraction Methods 0.000 claims 1
- 230000004044 response Effects 0.000 abstract description 8
- 238000000034 method Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 9
- 239000007789 gas Substances 0.000 description 9
- 230000000052 comparative effect Effects 0.000 description 7
- 230000003068 static effect Effects 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000010894 electron beam technology Methods 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- KFVPJMZRRXCXAO-UHFFFAOYSA-N [He].[O] Chemical compound [He].[O] KFVPJMZRRXCXAO-UHFFFAOYSA-N 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images



Landscapes
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Feedback Control In General (AREA)
- Control Of Position Or Direction (AREA)
Abstract
Description
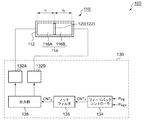
110 流体圧アクチュエータ
112 第1部材
114 圧力室
116 空間
120 第2部材
122 隔壁
130 駆動部
132 圧縮空気源
134 フィードバックコントローラ
136 ノッチフィルタ
138 出力部
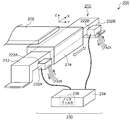
200 エアステージ装置
202 ステージテーブル
210 流体圧アクチュエータ
212 固定ガイド
214 スライダ
216 圧力室
218 空間
220 隔壁
222 給排ポート
230 駆動部
232 サーボ弁
234 コントローラ
236 ノッチフィルタ
Claims (4)
- ステージテーブルと、
前記ステージテーブルを位置決めする流体圧アクチュエータと、
前記流体圧アクチュエータを駆動する駆動部と、
を備え、
前記駆動部は、その制御ループに設けられ、前記ステージテーブルの位置に応じて阻止周波数が変化するノッチフィルタを含むことを特徴とするエアステージ装置。 - 前記流体圧アクチュエータは、
固定ガイドと、
前記固定ガイドに沿って移動可能なスライダと、
を備え、
前記固定ガイドには、前記スライダとの間に形成される圧力室を、2つの空間に区画する隔壁と、前記圧力室と通ずる少なくともひとつの給排ポートと、が設けられており、
前記駆動部は、
前記少なくともひとつの給排ポートと接続される少なくともひとつのサーボ弁と、
前記少なくともひとつのサーボ弁を制御するコントローラと、
を含むことを特徴とする請求項1に記載のエアステージ装置。 - 固定ガイドと、
前記固定ガイドに沿って移動可能なスライダと、
を備え、
前記固定ガイドには、前記スライダとの間に形成される圧力室を、2つの空間に区画する隔壁と、前記圧力室と通ずる少なくともひとつの給排ポートと、が設けられており、
前記少なくともひとつの給排ポートと接続される少なくともひとつのサーボ弁と、
前記少なくともひとつのサーボ弁に対する制御指令を生成するコントローラと、
をさらに備え、
前記コントローラは、その制御ループに設けられ、前記スライダの位置に応じて阻止周波数が変化するノッチフィルタを含むことを特徴とするサーボ装置。 - 内部に圧力室を有する第1部材と、前記圧力室を2つの空間に区画する隔壁を有する第2部材と、を有する流体圧アクチュエータと、
前記2つの空間に流入および/または流出する流体を操作することにより、前記第1部材と前記第2部材との相対的な変位量を制御する駆動部と、
を備え、
前記駆動部は、
前記変位量が目標値に近づくように制御指令を生成するフィードバックコントローラと、
前記制御指令の経路上に設けられ、前記変位量に応じて阻止周波数が変化するノッチフィルタと、
を含むことを特徴とするサーボ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018064834A JP7045237B2 (ja) | 2018-03-29 | 2018-03-29 | エアステージ装置、サーボ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018064834A JP7045237B2 (ja) | 2018-03-29 | 2018-03-29 | エアステージ装置、サーボ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019175280A true JP2019175280A (ja) | 2019-10-10 |
| JP7045237B2 JP7045237B2 (ja) | 2022-03-31 |
Family
ID=68167057
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018064834A Active JP7045237B2 (ja) | 2018-03-29 | 2018-03-29 | エアステージ装置、サーボ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7045237B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62126402A (ja) * | 1985-11-27 | 1987-06-08 | Omron Tateisi Electronics Co | Xyステ−ジ制御装置 |
| JP2004031978A (ja) * | 2003-08-05 | 2004-01-29 | Sumitomo Heavy Ind Ltd | 露光装置 |
-
2018
- 2018-03-29 JP JP2018064834A patent/JP7045237B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62126402A (ja) * | 1985-11-27 | 1987-06-08 | Omron Tateisi Electronics Co | Xyステ−ジ制御装置 |
| JP2004031978A (ja) * | 2003-08-05 | 2004-01-29 | Sumitomo Heavy Ind Ltd | 露光装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7045237B2 (ja) | 2022-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100424981C (zh) | 电机控制装置 | |
| KR101460463B1 (ko) | 모터 제어 장치 | |
| CN108304005B (zh) | 阀控制装置 | |
| CN101187446B (zh) | 药液供给系统及药液供给控制装置 | |
| US11035488B2 (en) | Vacuum valve and valve control device | |
| CN111095132B (zh) | 伺服控制装置 | |
| CN114909367B (zh) | 一种基于扩张状态观测器的非奇异终端滑模气动定位控制方法 | |
| KR20080016865A (ko) | 기계 위치 제어 장치 | |
| KR20010031347A (ko) | 전동기 속도제어장치 및 그 장치의 게인설정방법 | |
| JP2019175280A (ja) | エアステージ装置、サーボ装置 | |
| TWI783961B (zh) | 馬達控制裝置 | |
| CN117307564A (zh) | 用于调节液压部件的方法 | |
| JP2019527314A (ja) | 電気力学式の駆動装置を備えた往復動する容積形ポンプおよび容積形ポンプを運転するための方法 | |
| JP6967760B2 (ja) | Xyステージ移動機構 | |
| JP4559822B2 (ja) | 気体圧制御弁 | |
| CN114763848B (zh) | 控制装置 | |
| JPWO2020044685A1 (ja) | ステージ装置 | |
| KR101433712B1 (ko) | 리니어 모션 스테이지의 제어 장치 | |
| JP2001336504A (ja) | 気体圧アクチュエータの制御方法及び制御装置 | |
| JP2010007704A (ja) | アクチュエータおよび制御方法 | |
| JP6769329B2 (ja) | 自動圧力調整バルブおよびバルブ制御装置 | |
| JP2002110523A (ja) | 露光装置 | |
| JP7845018B2 (ja) | 制御システム、姿勢調整装置及び制御方法 | |
| JP7122994B2 (ja) | 液圧システム制御装置 | |
| Ishii et al. | Proposal of speeding up scheme for pneumatic stage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7045237 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |