JP2019197009A - 情報処理装置、情報処理方法およびプログラム - Google Patents
情報処理装置、情報処理方法およびプログラム Download PDFInfo
- Publication number
- JP2019197009A JP2019197009A JP2018091768A JP2018091768A JP2019197009A JP 2019197009 A JP2019197009 A JP 2019197009A JP 2018091768 A JP2018091768 A JP 2018091768A JP 2018091768 A JP2018091768 A JP 2018091768A JP 2019197009 A JP2019197009 A JP 2019197009A
- Authority
- JP
- Japan
- Prior art keywords
- observation
- calculation unit
- information processing
- time
- equation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
- G01S19/47—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement the supplementary measurement being an inertial measurement, e.g. tightly coupled inertial
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
- G01S19/44—Carrier phase ambiguity resolution; Floating ambiguity; LAMBDA [Least-squares AMBiguity Decorrelation Adjustment] method
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【課題】測位信号の受信が途切れるサイクルスリップが発生しても整数バイアスの推定し直しを不要とする。【解決手段】前観測時の位置をセンサからの観測情報に基づいて更新する。衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る。例えば、第2の演算部は、第1の演算部で更新される位置の誤差が搬送波波長の1/2より小さい間に、上記更新位置を初期値として変形観測方程式を解くようにする。【選択図】図10
Description
本技術は、情報処理装置、情報処理方法およびプログラムに関し、詳しくは、GNSS(Global Navigation Satellite System / 全球測位衛星システム)による測位を行う情報処理装置等に関する。
従来、GNSSを構成する複数の衛星からの測位信号(電波)を観測して得られた観測情報に基づいて測位を行う測位技術が知られている。そして、測位方式のひとつとして、RTK(Real Time Kinematic)測位が知られている(例えば、特許文献1参照)。このRTK測位では、観測情報としての搬送波位相および疑似距離の二重差から構成される観測方程式から位置が算出される。
この場合、観測方程式に存在する整数バイアスが非線形最小二乗法、さらには整数最小二乗法を用いて推定され、その推定値が用いられて観測方程式が解かれることで基準局からの相対位置が算出される。ここで、ある観測時(エポック時)で得られた整数バイアスの推定値は、測位信号を補足している限り、その後の観測時においても用いることができる。しかし、測位信号の受信が途切れるサイクルスリップが発生した場合には、整数バイアスが変化することから、整数バイアスの推定し直しが必要となる。この整数バイアスの推定し直しには、ある程度の時間を要し、その間は位置精度が低下したものとなる。
本技術の目的は、測位信号の受信が途切れるサイクルスリップが発生しても整数バイアスの推定し直しを不要とすることにある。
本技術の概念は、
前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算部と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算部を備える
情報処理装置にある。
前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算部と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算部を備える
情報処理装置にある。
本技術において、第1の演算部により、前観測時の位置がセンサからの観測情報に基づいて更新される。例えば、センサは、慣性計測装置(IMU:Inertial Measurement Unit)を構成するセンサである、ようにされてもよい。第2の演算部により、衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式が、上記更新位置を初期値として解かれて、現観測時の位置が得られる。例えば、周期関数は、三角関数である、ようにされてもよい。
例えば、第2の演算部は、第1の演算部で更新される位置の誤差が搬送波波長の1/2より小さい間に、上記更新位置を初期値として変形観測方程式を解く、ようにされてもよい。これにより、変形観測方程式を効率的に解いて現観測時の位置を高精度で得ることが可能となる。また、例えば、搬送波は、第1の搬送波と第2の搬送波をワイドレーン線形結合して得られた搬送波である、ようにされてもよい。これにより、第1の演算部で更新される位置の誤差の許容を大きくすることが可能となる。
また、例えば、衛星からの測位信号から観測される搬送波位相および疑似距離の二重差から構成される観測方程式を解いて位置を得る第3の計算部をさらに備え、第1の演算部における最初の前観測時の位置は第3の演算部で得られる、ようにされてもよい。
このように本技術においては、搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を解くことで現観測時の位置を得るものである。そのため、測位信号の受信が途切れるサイクルスリップが発生しても整数バイアスの推定し直しを不要とすることが可能となる。また、本技術においては、前観測時の位置をセンサからの観測情報に基づいて更新された位置(十分に解に近い位置)を初期値として変形観測方程式を解くものである。そのため、現観測時の位置を高い精度で得ることが可能となる。
本技術によれば、測位信号の受信が途切れるサイクルスリップが発生しても整数バイアスの推定し直しを不要として位置精度の低下を回避できる。なお、ここに記載された効果は必ずしも限定されるものではなく、本開示中に記載されたいずれかの効果であってもよい。
以下、発明を実施するための形態(以下、「実施の形態」とする)について説明する。なお、説明は以下の順序で行う。
1.実施の形態
2.変形例
1.実施の形態
2.変形例
<1.実施の形態>
最初に、従来のRTK測位を説明する。図1は、従来のRTK測位における初期の観測時(エポック時)の手順の一例を示している。ステップST1において、GNSSを構成する複数の衛星からの測位信号(電波)を観測することで、RTK測位に必要な観測情報(疑似距離、搬送波位相)が取得される。
最初に、従来のRTK測位を説明する。図1は、従来のRTK測位における初期の観測時(エポック時)の手順の一例を示している。ステップST1において、GNSSを構成する複数の衛星からの測位信号(電波)を観測することで、RTK測位に必要な観測情報(疑似距離、搬送波位相)が取得される。
図2は、受信機rで取得される疑似距離について説明するための図である。(x1,y1,z1)は衛星の位置(既知)を示し、(xu,yu,zu)は受信機rの位置を示している。受信機rは、衛星から受信した測位信号に含まれる拡散コード(測位コード)により測定された衛星との間の信号伝搬時間に光速を掛けることで疑似距離Pを得る。拡散コードの1単位である1チップは、300[m]である。
この疑似距離Pは、以下の数式(1)のように表される。ここで、ρは、衛星と受信機rとの間の幾何学距離(m)、cは光速(m/s)、δtuは受信機時計誤差、δtsは衛星時計誤差、Iは電離層遅延(m)、Tは対流圏遅延(m)、ερはその他の誤差である。
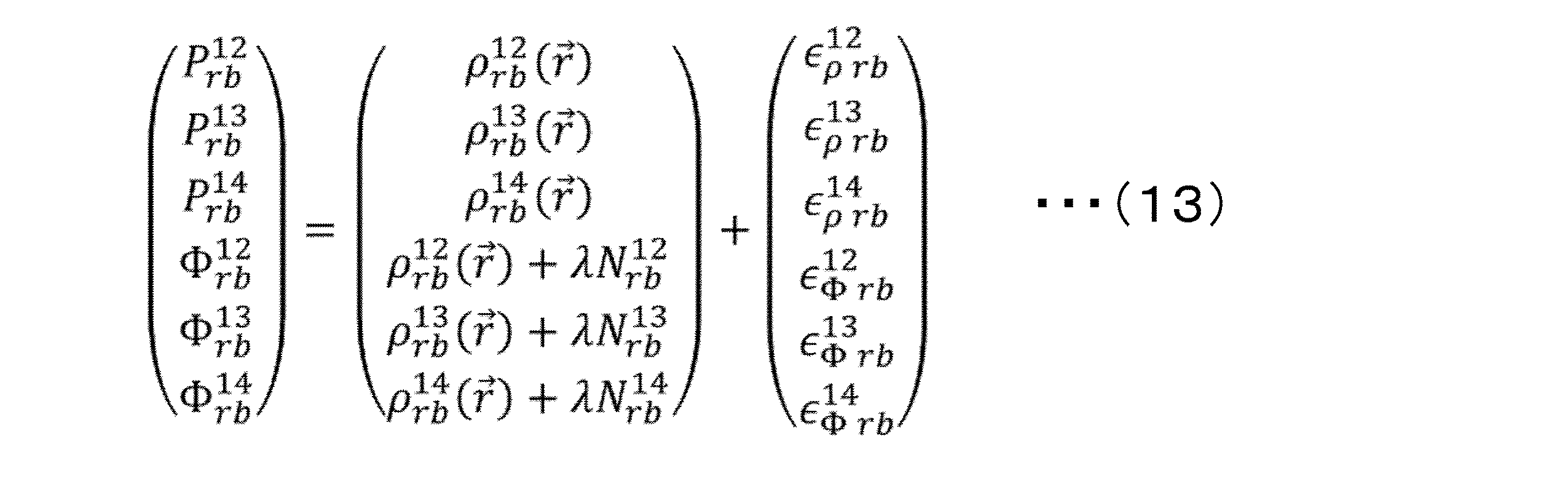
図3は、受信機rで取得される搬送波位相について説明するための図である。(x1,y1,z1)は衛星の位置(既知)を示し、(xu,yu,zu)は受信機rの位置を示している。受信機rは、搬送波位相φを観測する。ここで、例えば、L1搬送波の場合、その周波数は1.5[GHz]程度であり、搬送波の1単位である1波長は19[cm]である。
この搬送波位相φは、以下の数式(2)のように表される。ここで、ρは衛星と受信機rとの間の幾何学距離(m)、cは光速(m/s)、δtuは受信機時計誤差、δtsは衛星時計誤差、Iは電離層遅延(m)、Tは対流圏遅延(m)、λは搬送波の波長、Bは位相バイアス、εφはその他の誤差である。
RTK測定を行うには、図4に示すように、最低4基以上の衛星が必要となると共に、位置が既知である基準局bを用意する必要がある。つまり、衛星と受信機rとの間の観測情報(疑似距離・搬送波位相)と、衛星と基準局bとの間の観測情報(疑似距離・搬送波位相)で、16(=4×2+4×2)の観測数が必要とされる。なお、実際には、後述するように、二重差が取られることから、観測数は6になる。
図1に戻って、ステップST1の次に、ステップST2において、疑似距離と搬送波位相の二重差が算出される。この場合、図5に示すように、2基の衛星1,2に係る受信機rおよび基準局bの観測情報が用いられて二重差が計算される。ここで、衛星1に係る基準局bの観測量がA、衛星1に係る受信機rの観測量がB、衛星2に係る基準局bの観測量がC、衛星2に係る受信機rの観測量がDであるとき、二重差=(A−B)−(C−D)と計算される。この二重差の計算は、受信機rの時計誤差および大気圏に由来する遅延および受信機rと衛星の初期位相バイアスを打ち消すために行われる。
図6に示すように、4基の衛星1〜4があれば、疑似距離・搬送波位相について、それぞれ衛星の組合せから6通りの二重差を計算できるが、通常は天頂に近い衛星1を固定し、その衛星1と他の衛星2〜4とを組み合わせた二重差、つまり3通りの二重差を計算して用いることが多い。
図7は、基準局bおよび受信機rで観測される衛星S1,S2に係る疑似距離を示している。衛星S1と受信機rとの間の疑似距離は、以下の数式(3)で表され、衛星S2と受信機rとの間の疑似距離は、以下の数式(4)で表され、衛星S1と基準局bとの間の疑似距離は、以下の数式(5)で表され、衛星S2と基準局bとの間の疑似距離は、以下の数式(6)で表される。
そのため、疑似距離の二重差は、以下の数式(7)で表され、電離層遅延と対流圏遅延は打ち消されたものとなる。
図8は、基準局bおよび受信機rで観測される衛星S1,S2に係る搬送波位相を示している。衛星S1と受信機rとの間の搬送波位相は、以下の数式(8)で表され、衛星S2と受信機rとの間の搬送波位相は、以下の数式(9)で表され、衛星S1と基準局bとの間の搬送波位相は、以下の数式(10)で表され、衛星S2と基準局bとの間の搬送波位相は、以下の数式(11)で表される。
そのため、搬送波位相の二重差は、以下の数式(12)で表され、電離層遅延と対流圏遅延は打ち消されたものとなる。また、位相バイアス「B」の部分は二重差をとることで整数バイアス「N」となる。
図1に戻って、ステップST2の次に、ステップST3において、搬送波位相および疑似距離の二重差から構成される観測方程式に基づいて整数バイアスが算出される。
以下の数式(13)は、搬送波位相および疑似距離の二重差から構成される観測方程式を示している。
なお、この観測方程式に関して、以下では、添え字の煩雑さを回避するため、適宜、以下の数式(14)あるいは数式(15)に示すように、簡略化した記号を用いて表すものとする。なお、数式(15)において、(x,y,z)は基準局bに対する受信機rの相対位置を示し、(N1,N2,N3)は3つの搬送波位相の二重差に含まれる整数バイアスを示している。
整数バイアスを算出するために、最初に、観測方程式に対して、非線形最小二乗法を適用して、整数バイアスと相対位置を算出する。具体的には、例えば、ガウス・ニュートン法(Gauss-Newton method)により解かれる。この場合、(x,y,z,N1,N2,N3)の初期値をセットし、以下の数式(16)の更新を収束するまで実行する。ただし、Hは、以下の数式(17)で表される。
このHを求めるには、観測方程式の幾何距離の二重差の微分の計算が必要となるが、それは以下の数式(18)で与えられる。
上述の非線形最小二乗法では、整数バイアスは実数解として求められてしまうので、次に、非線形最小二乗法における解を初期値として、観測方程式に対して、整数最小二乗法を適用して、整数バイアス値の整数解を求める。つまり、整数バイアスを整数とした制約で最小二乗条件を満たす解を探索するものである。
整数最小二乗法としては、例えば、以下の(1)あるいは(2)の方法が知られている。
(1)P.J.G.Teunissen, The least-square ambiguity decorrelation adjustment: a method for fast GPS ambiguity stimation, J.Geodesy, Vol.70, 65-82, 1995
(2)
X.-W.Chang, X.Yang, T.Zhou, MLAMBDA: A modified LAMBDA method for integer least-squares estimation, J.Geodesy, Vol.79, 552-565, 2005
(1)P.J.G.Teunissen, The least-square ambiguity decorrelation adjustment: a method for fast GPS ambiguity stimation, J.Geodesy, Vol.70, 65-82, 1995
(2)
X.-W.Chang, X.Yang, T.Zhou, MLAMBDA: A modified LAMBDA method for integer least-squares estimation, J.Geodesy, Vol.79, 552-565, 2005
図1に戻って、ステップST3の次に、ステップST4において、観測方程式に対して、算出された整数解の整数バイアスが用いられた状態で、非線形最小二乗法が適用されて、相対位置である(x、y、z)が算出される。
なお、初期観測時以降の観測時(エポック時)においては、測位信号の受信が途切れるサイクルスリップが発生するまでは、新たな観測情報に基づく観測方程式に、上述したように算出された整数解の整数バイアスがそのまま用いられて、相対位置である(x、y、z)が算出される。サイクルスリップが発生する場合には、上述の初期観測時の処理と同様に整数バイアスの算出処理を含めた処理が行われて、相対位置の算出が行われる。
「受信機の構成」
図9は、実施の形態としての受信機100の構成例を示している。この受信機100は、GNSS(Global Navigation Satellite System:全地球衛星測位システム)受信部101と、測位演算部102と、通信部103と、センサとしてのIMU(Inertial Measurement Unit:慣性計測装置)部104と、積算部105を有している。
図9は、実施の形態としての受信機100の構成例を示している。この受信機100は、GNSS(Global Navigation Satellite System:全地球衛星測位システム)受信部101と、測位演算部102と、通信部103と、センサとしてのIMU(Inertial Measurement Unit:慣性計測装置)部104と、積算部105を有している。
GNSS受信部101は、GNSSを構成する複数の衛星からの測位信号(電波)を受信して測位演算部102に供給する。通信部103は、位置が既知である基準局で観測された観測情報(疑似距離、搬送波位相)を、例えばインターネットを介して受信して測位演算部102に供給する。
IMU部104は、例えば、ジャイロセンサ、加速度センサ等を備え、周期的に、観測値として3軸方向の角速度および加速度を出力する。積算部105は、測位演算部102で求められた相対位置(x,y,z)を、IMU部104の観測情報に基づく積算処理を行って更新し、更新位置を測位演算部102に供給する。
測位演算部102は、初期観測時(初期エポック時)においては、上述した従来のRTK測位と同様の処理を行って相対位置(x,y,z)を求める。また、測位演算部102は、初期観測時以降の観測時においては、搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上述の積算部105からの更新位置を初期値として、最小二乗法によって解いて、相対位置(x,y,z)を求める。なお、疑似距離に関しては、観測誤差が大きいので使用しない。
この実施の形態では、周期関数として三角関数が使用され、以下の数式(19)で示すように整数バイアスが消去された変形観測方程式が用いられる。
図10のフローチャートは、測位演算部102における測位処理の手順の一例を示している。なお、「s」は観測情報(疑似距離・搬送波位相)の更新ステップを表している。一般に、GNSSの観測情報とIMUの観測情報では観測頻度においてIMUの方が多いので、それを表現するために導入している。例えば、s=3であるとすると、GNSSの観測情報とIMUの観測情報の取得頻度は以下のようになる。
GNSSの観測情報:i=0, 3, 6, 9, ...
IMUの観測情報 :i=0, 1, 2, 3, 4, 5, 6, 7, 8, 9, ...
GNSSの観測情報:i=0, 3, 6, 9, ...
IMUの観測情報 :i=0, 1, 2, 3, 4, 5, 6, 7, 8, 9, ...
左側のステップST11〜ST14の処理は、エポック「i=0」における処理を示しており、従来のRTK測位における処理(図1参照)に対応している。まず、測位演算部102は、ステップST11において、エポック「i=0」の観測情報(疑似距離、搬送波位相)を取得する。この場合、自身の受信機rの観測情報(疑似距離、搬送波位相)はGNSS受信部101から供給され、基準局bの観測情報(疑似距離、搬送波位相)は通信部103から供給される。
次に、測位演算部102は、ステップST12において、疑似距離と搬送波位相の二重差を算出する(数式(7)、(12)参照)。次に、測位演算部102は、ステップST13において、搬送波位相および疑似距離の二重差から構成される観測方程式(数式(13)、(14)参照)に基づいて、非線形最小二乗法、整数最小二乗法を順に適用して、整数バイアスを算出する。
次に、測位演算部102は、ステップST14において、観測方程式に対して、算出された整数解の整数バイアスを用いた状態で、非線形最小二乗法を適用して、基準局bに対する受信機100の相対位置(x、y、z)を算出する。このように算出された相対位置(x、y、z)は、エポック「i=0」における位置情報となる。
また、中央および右側のステップST15〜18の処理は、初期観測時以降における処理を示している。測位演算部102は、ステップST15において、IMU観測情報(角速度、加速度)を取得する。次に、測位演算部102は、ステップST16において、ステップST14、あるいは後述するステップST18で算出された相対位置を、ステップST11で取得されたIMU観測情報に基づく積算処理で更新する。
また、測位演算部102は、ステップST17において、エポック「i+s」の観測情報(疑似距離、搬送波位相)を取得する。この場合、自身の受信機rの観測情報(疑似距離、搬送波位相)はGNSS受信部101から供給され、基準局bの観測情報(搬送波位相)は通信部103から供給される。
次に、測位演算部102は、ステップST18において、搬送波位相の二重差を算出し、その二重差から構成される変形観測方程式(数式(19)参照)を、ステップST16で得られた更新位置を初期値として、非線形最小二乗法によって解いて、相対位置(x,y,z)を求める。このように算出された相対位置(x、y、z)は、エポック「i+s」における位置情報となる。
なお、上述したように変形観測方程式を用いて相対位置(x,y,z)を求める場合、解に十分近い初期値を選ばないと正しい解に収束しない。この場合、ステップST16で得られる更新位置の誤差(IMU積算誤差)は、λ/2より小さいことが必要である。つまり、IMU積算誤差がλ/2より小さい間にステップST18の計算を行う必要があると言える。なお、GNSS観測が得られずに、IMU積算誤差が閾値を超えてしまう場合は、波長程度の長さの格子点を設定し、誤差球内の各点を初期値として探索を行うことができる。
以上説明したように、図9に示す受信機100においては、搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を解くことで現観測時の位置(基準局bからの相対位置)が得られる。そのため、測位信号の受信が途切れるサイクルスリップが発生しても整数バイアスの推定し直すことが必要でなくなる。
また、図9に示す受信機100においては、前観測時(前エポック時)の位置をIMUの観測情報に基づく積算処理で更新された位置(十分に解に近い位置)を初期値として変形観測方程式が最小二乗法で解かれる。そのため、現観測時(現エポック時)の位置(基準局bからの相対位置)を高い精度で得ることができる。
<2.変形例>
なお、上述実施の形態においては、初期観測時以降の観測時においては、整数バイアスを消去してなる変形観測方程式を解くことで現観測時の位置を得る例を説明した。しかし、初期観測時以降の観測時においても初期観測時と同様にRTK測位で現観測時の位置を得ることを続け、整数バイアスが正しく求めることができずRTK測位に失敗した場合に、変形観測方程式を用いて現観測時の位置を得るようにすることも考えられる。
なお、上述実施の形態においては、初期観測時以降の観測時においては、整数バイアスを消去してなる変形観測方程式を解くことで現観測時の位置を得る例を説明した。しかし、初期観測時以降の観測時においても初期観測時と同様にRTK測位で現観測時の位置を得ることを続け、整数バイアスが正しく求めることができずRTK測位に失敗した場合に、変形観測方程式を用いて現観測時の位置を得るようにすることも考えられる。
図11のフローチャートは、その場合における、測位演算部102における測位処理の手順の一例を示している。この図11において、図10のフローチャートのステップと対応するステップには同一符号を付して示している。初期観測時におけるステップST11〜ST14の処理については、その説明は省略する。
初期観測時以降における処理について説明する。測位演算部102は、ステップST17において、エポック「i+s」の観測情報(疑似距離、搬送波位相)を取得する。次に、ステップST21において、疑似距離と搬送波位相の二重差を算出する(数式(7)、(12)参照)。次に、測位演算部102は、ステップST22において、搬送波位相および疑似距離の二重差から構成される観測方程式(数式(13)、(14)参照)に基づいて、非線形最小二乗法、さらには整数最小二乗法を順に適用して、整数バイアスを算出する。
次に、測位演算部102は、ステップST23において、整数バイアスが正しく求まったか、つまり成功した否かを判断する。成功であるとき、測位演算部102は、ステップST24において、観測方程式に対して、算出された整数解の整数バイアスを用いた状態で、非線形最小二乗法を適用して、基準局bに対する受信機100の相対位置(x、y、z)を算出する。このように算出された相対位置(x、y、z)は、エポック「i+s」における位置情報となる。
一方、ステップST23で成功でないとき、測位演算部102は、ステップST18の処理に移る。このステップST18において、測位演算部102は、搬送波位相の二重差を算出し、その二重差から構成される変形観測方程式(数式(19)参照)を、ステップST16で得られた更新位置を初期値として、非線形最小二乗法によって解いて、相対位置(x,y,z)を求める。このように算出された相対位置(x、y、z)は、エポック「i+s」における位置情報となる。
また、上述実施の形態においては、周期関数として三角関数を用いた例を示したが、周期関数はこれに限定されるものではなく、指数関数やmod関数を用いることも可能である。ここで、最適化法で問題を解く場合には関数が連続であったほうがよい。さらに、最適化法がヤコビアン(Jacobian)等を要求する場合は、関数は少なくとも一回微分可能であったほうがよい.以下の数式(20)は指数関数を用いた場合の変形観測方程式の一例を示している。また、以下の数式(21)は、mod関数を用いた場合の変形観測方程式の一例を示している。
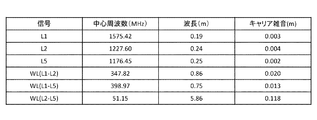
また、上述実施の形態のように、整数バイアスが消去された変形観測方程式を用いて相対位置(x,y,z)を求める場合、積算部105における更新位置の誤差(IMU積算誤差)は、λ/2より小さいことが必要である。ワイドレーン線形結合と呼ばれる手法によって長波長の搬送波の観測とすることで、IMUの許容積算誤差を大きくできる。
図12は、L1,L2,L5の搬送波の波長、それらのワイドレーン結合時における波長等を示している。例えば、L1搬送波(波長は19.0cm)とL2搬送波(波長は24.4cm)のワイドレーン線形結合は、以下の数式(22)で与えられ、波長は、以下の数式(23)で示すように、86.2cmとなる。
また、上述実施の形態においては、GNSS計算がRTKでフィージョン相手がIMUである組み合わせの例を示したが、GNSS計算とフィージョン相手との組み合わせは、これに限定されない。例えば、{RTK、PPP、PPP−RTK}×{IMU、RIDAR、SLAM、リローカライズ}の組み合わせが考えられる。
また、上述の実施の形態において、受信機100における各部の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な汎用のパーソナルコンピュータなどが含まれる。
図13は、パーソナルコンピュータ700の構成例を示している。CPU(Central Processing Unit)701は、ROM(Read Only Memory)702に記憶されているプログラム、または記憶部713からRAM(Random Access Memory)703にロードされたプログラムに従って各種の処理を実行する。RAM703にはまた、CPU701が各種の処理を実行する上において必要なデータなども適宜記憶される。
CPU701、ROM702、およびRAM703は、バス704を介して相互に接続されている。このバス704にはまた、入出力インタフェース710も接続されている。
入出力インタフェース710には、キーボード、マウスなどよりなる入力部711、CRT(Cathode Ray Tube)やLCD(Liquid Crystal Display)などよりなるディスプレイ、並びにスピーカなどよりなる出力部712、ハードディスクなどより構成される記憶部713、モデムなどより構成される通信部714が接続されている。通信部714は、インターネットを含むネットワークを介しての通信処理を行う。
入出力インタフェース710にはまた、必要に応じてドライブ715が接続され、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどのリムーバブルメディア721が適宜装着され、それらから読み出されたコンピュータプログラムが、必要に応じて記憶部713にインストールされる。
また、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
また、本技術は、以下のような構成を取ることもできる。
(1)前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算部と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算部を備える
情報処理装置。
(2)上記センサは、慣性計測装置を構成するセンサである
前記(1)に記載の情報処理装置。
(3)上記周期関数は、三角関数である
前記(1)または(2)に記載の情報処理装置。
(4)上記第2の演算部は、上記第1の演算部で更新される位置の誤差が搬送波波長の1/2より小さい間に、上記更新位置を初期値として上記変形観測方程式を解く
前記(1)から(3)のいずれかに記載の情報処理装置。
(5)上記搬送波は、第1の搬送波と第2の搬送波をワイドレーン線形結合して得られた搬送波である
前記(1)から(4)のいずれかに記載の情報処理装置。
(6)衛星からの測位信号から観測される搬送波位相および疑似距離の二重差から構成される観測方程式を解いて位置を得る第3の計算部をさらに備え、
上記第1の演算部における最初の上記前観測時の位置は上記第3の演算部で得られる
前記(1)から(5)のいずれかに記載の情報処理装置。
(7)前観測時の位置をセンサからの観測情報に基づいて更新する手順と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る手順を有する
情報処理方法。
(8)コンピュータを、
前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算手段と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算手段として機能させる
プログラム。
(1)前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算部と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算部を備える
情報処理装置。
(2)上記センサは、慣性計測装置を構成するセンサである
前記(1)に記載の情報処理装置。
(3)上記周期関数は、三角関数である
前記(1)または(2)に記載の情報処理装置。
(4)上記第2の演算部は、上記第1の演算部で更新される位置の誤差が搬送波波長の1/2より小さい間に、上記更新位置を初期値として上記変形観測方程式を解く
前記(1)から(3)のいずれかに記載の情報処理装置。
(5)上記搬送波は、第1の搬送波と第2の搬送波をワイドレーン線形結合して得られた搬送波である
前記(1)から(4)のいずれかに記載の情報処理装置。
(6)衛星からの測位信号から観測される搬送波位相および疑似距離の二重差から構成される観測方程式を解いて位置を得る第3の計算部をさらに備え、
上記第1の演算部における最初の上記前観測時の位置は上記第3の演算部で得られる
前記(1)から(5)のいずれかに記載の情報処理装置。
(7)前観測時の位置をセンサからの観測情報に基づいて更新する手順と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る手順を有する
情報処理方法。
(8)コンピュータを、
前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算手段と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算手段として機能させる
プログラム。
100・・・受信機
101・・・GNSS受信部
102・・・測位演算部
103・・・通信部
104・・・IMU部
105・・・積算部
101・・・GNSS受信部
102・・・測位演算部
103・・・通信部
104・・・IMU部
105・・・積算部
Claims (8)
- 前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算部と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新位置を初期値として解くことで現観測時の位置を得る第2の演算部を備える
情報処理装置。 - 上記センサは、慣性計測装置を構成するセンサである
請求項1に記載の情報処理装置。 - 上記周期関数は、三角関数である
請求項1に記載の情報処理装置。 - 上記第2の演算部は、上記第1の演算部で更新される位置の誤差が搬送波波長の1/2より小さい間に、上記更新位置を初期値として上記変形観測方程式を解く
請求項1に記載の情報処理装置。 - 上記搬送波は、第1の搬送波と第2の搬送波をワイドレーン線形結合して得られた搬送波である
請求項1に記載の情報処理装置。 - 衛星からの測位信号から観測される搬送波位相および疑似距離の二重差から構成される観測方程式を解いて位置を得る第3の計算部をさらに備え、
上記第1の演算部における最初の上記前観測時の位置は上記第3の演算部で得られる
請求項1に記載の情報処理装置。 - 前観測時の位置をセンサからの観測情報に基づいて更新する手順と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新された位置を初期値として解くことで現観測時の位置を得る手順を有する
情報処理方法。 - コンピュータを、
前観測時の位置をセンサからの観測情報に基づいて更新する第1の演算手段と、
衛星からの測位信号から観測される搬送波位相の二重差から構成される観測方程式に周期関数を適用して整数バイアスを消去してなる変形観測方程式を、上記更新された位置を初期値として解くことで現観測時の位置を得る第2の演算手段として機能させる
プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018091768A JP2019197009A (ja) | 2018-05-10 | 2018-05-10 | 情報処理装置、情報処理方法およびプログラム |
| US17/049,560 US11573334B2 (en) | 2018-05-10 | 2019-04-26 | Information processing device, information processing method, and program |
| PCT/JP2019/017874 WO2019216261A1 (ja) | 2018-05-10 | 2019-04-26 | 情報処理装置、情報処理方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018091768A JP2019197009A (ja) | 2018-05-10 | 2018-05-10 | 情報処理装置、情報処理方法およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019197009A true JP2019197009A (ja) | 2019-11-14 |
Family
ID=68468220
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018091768A Pending JP2019197009A (ja) | 2018-05-10 | 2018-05-10 | 情報処理装置、情報処理方法およびプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11573334B2 (ja) |
| JP (1) | JP2019197009A (ja) |
| WO (1) | WO2019216261A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113917509A (zh) * | 2021-12-15 | 2022-01-11 | 腾讯科技(深圳)有限公司 | 一种双差模糊度固定方法、设备以及可读存储介质 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111999750B (zh) * | 2020-10-29 | 2021-01-08 | 中国人民解放军国防科技大学 | 针对杆臂不准的实时单站周跳探测改进方法 |
| CN112147663B (zh) * | 2020-11-24 | 2021-02-09 | 中国人民解放军国防科技大学 | 一种卫星和惯性组合动对动实时精密相对定位方法 |
| CN117250647A (zh) * | 2022-06-09 | 2023-12-19 | 腾讯科技(深圳)有限公司 | 定位方法、装置、设备及存储介质 |
| US20240210569A1 (en) * | 2022-12-22 | 2024-06-27 | Ixblue | System and method for estimating the movement or position of a moving object |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6278945B1 (en) | 1997-11-24 | 2001-08-21 | American Gnc Corporation | Fully-coupled positioning process and system thereof |
| JPH11281728A (ja) * | 1998-03-31 | 1999-10-15 | Japan Aviation Electronics Ind Ltd | キネマテック法gpsと慣性航法装置併用測位方法 |
| US6449559B2 (en) | 1998-11-20 | 2002-09-10 | American Gnc Corporation | Fully-coupled positioning process and system thereof |
| JP2012207919A (ja) | 2011-03-29 | 2012-10-25 | Toyota Central R&D Labs Inc | 異常値判定装置、測位装置、及びプログラム |
| JP2017198531A (ja) | 2016-04-27 | 2017-11-02 | ソニー株式会社 | 測位装置、測位システム、測位方法 |
| CN108732603B (zh) * | 2017-04-17 | 2020-07-10 | 百度在线网络技术(北京)有限公司 | 用于定位车辆的方法和装置 |
| WO2019083523A1 (en) * | 2017-10-23 | 2019-05-02 | Deere & Company | VECTOR PHASE LOCKING LOOP ARCHITECTURE RTK |
-
2018
- 2018-05-10 JP JP2018091768A patent/JP2019197009A/ja active Pending
-
2019
- 2019-04-26 WO PCT/JP2019/017874 patent/WO2019216261A1/ja not_active Ceased
- 2019-04-26 US US17/049,560 patent/US11573334B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113917509A (zh) * | 2021-12-15 | 2022-01-11 | 腾讯科技(深圳)有限公司 | 一种双差模糊度固定方法、设备以及可读存储介质 |
| CN113917509B (zh) * | 2021-12-15 | 2022-03-01 | 腾讯科技(深圳)有限公司 | 一种双差模糊度固定方法、设备以及可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11573334B2 (en) | 2023-02-07 |
| US20210239854A1 (en) | 2021-08-05 |
| WO2019216261A1 (ja) | 2019-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019216261A1 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| EP3805803B1 (en) | Positioning method and device | |
| US10564293B2 (en) | Navigation satellite orbit and low latency clock determination with wide-lane and narrow-lane bias corrections | |
| US10386496B2 (en) | Navigation satellite orbit and clock determination with low latency clock corrections | |
| US10260888B2 (en) | Navigation satellite system, electronic device, and positioning method | |
| US10338232B2 (en) | Navigation satellite wide-lane bias determination system and method | |
| RU2389037C2 (ru) | Навигация gps с использованием последовательных разностей измерений фазы несущей | |
| CN105807300B (zh) | 一种用北斗双频接收机进行高精度动态单点定位的方法 | |
| AU2015277932B2 (en) | Conversion device and program | |
| US11125890B2 (en) | Advanced navigation satellite system positioning method and system using seeding information | |
| JP2010504523A (ja) | 3つのGPS周波数を用いて整数値サイクル(whole−cycle)搬送波位相アンビギュイティを解消する方法 | |
| BRPI0923463A2 (pt) | método, receptor de navegação de satélite móvel, e, meio de armazenamento legível por computador | |
| CN110174104A (zh) | 一种组合导航方法、装置、电子设备及可读存储介质 | |
| JP2007529010A (ja) | 2周波数の一方で測定データが利用できない場合に短期間バックアップ2周波数ナビゲーションを行なう方法 | |
| JP2016128837A (ja) | Gnss測位装置およびgnss測位方法 | |
| CN112444832A (zh) | 一种一机多天线接收机的周跳修复方法 | |
| US20230194731A1 (en) | Calculating a position of one device relative to another | |
| CN109752747B (zh) | 差分数据确定方法、装置、服务器及存储介质 | |
| KR102365291B1 (ko) | 위성항법 및 기압고도계의 상대 위치 정확도를 향상 시키는 위성항법 시스템 및 그 방법 | |
| JP2007163335A (ja) | 姿勢標定装置、姿勢標定方法および姿勢標定プログラム | |
| JP6546730B2 (ja) | 衛星信号受信装置 | |
| WO2015192599A1 (zh) | 一种定位方法和设备、存储介质 | |
| CN116577816A (zh) | 利用双差定位确定用户站位置的方法、装置及存储介质 | |
| Zhang et al. | A smartphone RTK algorithm based on velocity constraint | |
| CN112987048A (zh) | 一种适用于Andriod智能终端的高精度定位方法、智能终端以及存储介质 |