JP2019199865A - 鞍乗型車両 - Google Patents
鞍乗型車両 Download PDFInfo
- Publication number
- JP2019199865A JP2019199865A JP2018096431A JP2018096431A JP2019199865A JP 2019199865 A JP2019199865 A JP 2019199865A JP 2018096431 A JP2018096431 A JP 2018096431A JP 2018096431 A JP2018096431 A JP 2018096431A JP 2019199865 A JP2019199865 A JP 2019199865A
- Authority
- JP
- Japan
- Prior art keywords
- pump
- turning
- type vehicle
- air
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A50/00—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE in human health protection, e.g. against extreme weather
- Y02A50/20—Air quality improvement or preservation, e.g. vehicle emission control or emission reduction by using catalytic converters
Landscapes
- Exhaust Gas After Treatment (AREA)
Abstract
【課題】二次エア供給用のエアポンプを備えた鞍乗型車両において、車両旋回時における操作性を向上させる。【解決手段】鞍乗型車両は、エンジン7の燃焼室31から排出された排気ガスが流れる排気通路53と、排気通路53内に配置される触媒52と、触媒52よりも上流側において排気通路53に接続される二次エア供給通路61と、エアクリーナ41から供給される二次エアを排気通路53に向けて送り出すエアポンプ62と、エアポンプ62の回転数を制御するポンプ制御部83と、鞍乗型車両が旋回しているか否かを判定する旋回判定部82と、を備え、ポンプ制御部83は、旋回判定部82の判定結果に応じてエアポンプ62の回転数に対する制御内容を変える。【選択図】図2
Description
本発明は、二次エア供給用のエアポンプを備えた鞍乗型車両に関する。
従来、自動二輪車等の鞍乗型車両は、エンジンの燃焼室から排出された排気ガスが流れる排気通路を備えており、この排気通路には、排気ガスを浄化するための触媒が設けられている。この触媒による排気ガスの浄化性能を向上させるために、排気通路に向けて二次エアを送り出すエアポンプを備えた鞍乗型車両が知られている。例えば、特許文献1には、二次空気を専用排気経路に向かって圧送するポンプを有する鞍乗型車両が開示されている。
ところで、鞍乗型車両や自動四輪車等の車両の部品には、車輪やクランク軸等の回転体が含まれている。このような回転体が車両走行時に回転すると、回転体の回転軸の向きを保とうとする力(いわゆる「ジャイロ効果」)が発生することが知られている。
特に、車両旋回時に車体を傾けることになる鞍乗型車両は、自動四輪車と比べて、車両旋回時にジャイロ効果が車両の安定性や運動性能に与える影響が大きい。そのため、車両旋回時に二次エア供給用のエアポンプが回転すると、エアポンプの制御内容によっては、エアポンプの回転によって発生するジャイロ効果によって、ライダーが操作性に違和感を覚える可能性がある。
また、鞍乗型車両の一種である自動二輪車は、自動四輪車と比べて軽量であるが、高出力の機種が多い。このような高出力の自動二輪車において、触媒による排気ガスの浄化性能を十分に向上させるためには、二次エア供給用のエアポンプを大型化することが求められる。そのため、高出力の自動二輪車にエアポンプを搭載する場合には、自動四輪車にエアポンプを搭載する場合と比べて、車両に対するエアポンプの比重が大きくなる。これに伴って、車両旋回時におけるジャイロ効果の影響が大きくなり、ライダーが操作性に違和感を覚える可能性が高まる。
そこで、本発明は、二次エア供給用のエアポンプを備えた鞍乗型車両において、車両旋回時における操作性を向上させることを目的とする。
本発明に係る鞍乗型車両は、少なくとも1個の燃焼室が内部に形成されたエンジンと、前記燃焼室から排出された排気ガスが流れる排気通路と、前記排気通路内に配置される触媒と、前記触媒よりも上流側において前記排気通路に接続される二次エア供給通路と、前記二次エア供給通路に接続されるエアクリーナと、前記二次エア供給通路に配置され、前記エアクリーナから供給される二次エアを前記排気通路に向けて送り出すエアポンプと、前記エアポンプの回転数を制御するポンプ制御部と、鞍乗型車両の状態を検出する状態検出部と、前記状態検出部の検出結果に基づいて前記鞍乗型車両が旋回しているか否かを判定する旋回判定部と、を備え、前記ポンプ制御部は、前記旋回判定部の判定結果に応じて前記エアポンプの回転数に対する制御内容を変える。
本発明によれば、二次エア供給用のエアポンプを備えた鞍乗型車両において、車両旋回時における操作性を向上させることができる。
本発明の一実施形態では、ポンプ制御部は、旋回判定部の判定結果に応じてエアポンプの回転数に対する制御内容を変える。これにより、車両旋回時に適切な大きさのジャイロ効果を発生させることができ、車両旋回時における操作性を向上させることができる。
また、上記のように車両旋回時に適切な大きさのジャイロ効果を発生させることができるため、車両旋回時にジャイロ効果の影響を懸念してエアポンプの駆動を停止させる必要がない。そのため、車両旋回時もエアポンプを駆動させることができ、エアポンプの駆動時間を増加させて、触媒による排気ガスの浄化性能を向上させることができる。
(自動二輪車1)
以下、図面に基づき、本発明の一実施例に係るオンロード型の自動二輪車1(鞍乗型車両の一例)について説明する。以下、前後、左右、上下等の方向を示す語は、自動二輪車1のライダーから見た方向を基準として用いる。図1に付される矢印Fr、Rr、U、Loは、それぞれ自動二輪車1の前方、後方、上方、下方を示している。なお、図2は模式図であるため、図2の図面上における自動二輪車1の各構成要素の位置は、実際の空間上における自動二輪車1の各構成要素の位置とは、必ずしも一致していない。
以下、図面に基づき、本発明の一実施例に係るオンロード型の自動二輪車1(鞍乗型車両の一例)について説明する。以下、前後、左右、上下等の方向を示す語は、自動二輪車1のライダーから見た方向を基準として用いる。図1に付される矢印Fr、Rr、U、Loは、それぞれ自動二輪車1の前方、後方、上方、下方を示している。なお、図2は模式図であるため、図2の図面上における自動二輪車1の各構成要素の位置は、実際の空間上における自動二輪車1の各構成要素の位置とは、必ずしも一致していない。
図1、図2を参照して、自動二輪車1は、車体フレーム2と、車体フレーム2の前方に配置されるステアリング機構3及び前輪4(車輪の一例)と、車体フレーム2の後下方に配置されるスイングアーム5及び後輪6(車輪の一例)と、車体フレーム2に支持されるエンジン7と、エンジン7に接続される吸気装置8、排気装置9及び二次エア供給装置10と、エンジン7及び二次エア供給装置10を制御する制御装置11と、を主体として構成されている。以下、上記各構成要素について順番に説明する。
(車体フレーム2)
図1を参照して、車体フレーム2は、ヘッドパイプ13と、ヘッドパイプ13から後方に向けて延びている左右一対のメインフレーム14と、左右一対のメインフレーム14の後方に設けられる左右一対のシートレール15と、を主体として構成されている。各メインフレーム14には、燃料タンク18が支持されている。各シートレール15には、ライダーシート(図示せず)が支持されている。
図1を参照して、車体フレーム2は、ヘッドパイプ13と、ヘッドパイプ13から後方に向けて延びている左右一対のメインフレーム14と、左右一対のメインフレーム14の後方に設けられる左右一対のシートレール15と、を主体として構成されている。各メインフレーム14には、燃料タンク18が支持されている。各シートレール15には、ライダーシート(図示せず)が支持されている。
(ステアリング機構3及び前輪4)
図1を参照して、ステアリング機構3は、ヘッドパイプ13に挿通されているステアリングシャフト(図示せず)と、ステアリングシャフトに接続されているハンドルバー3a及び左右一対のフロントフォーク3bと、を備えている。各フロントフォーク3bの下端部には、前輪4が回転可能に支持されている。
図1を参照して、ステアリング機構3は、ヘッドパイプ13に挿通されているステアリングシャフト(図示せず)と、ステアリングシャフトに接続されているハンドルバー3a及び左右一対のフロントフォーク3bと、を備えている。各フロントフォーク3bの下端部には、前輪4が回転可能に支持されている。
(スイングアーム5及び後輪6)
図1を参照して、スイングアーム5の前端部は、各メインフレーム14の後部にピボット軸19を介して接続されている。これにより、スイングアーム5がピボット軸19を中心に揺動可能となっている。スイングアーム5の後端部には、後輪6が回転可能に支持されている。
図1を参照して、スイングアーム5の前端部は、各メインフレーム14の後部にピボット軸19を介して接続されている。これにより、スイングアーム5がピボット軸19を中心に揺動可能となっている。スイングアーム5の後端部には、後輪6が回転可能に支持されている。
(エンジン7)
図1、図2を参照して、エンジン7は、例えば、水冷式の並列4気筒エンジンである。以下、エンジン7の気筒ごとに設けられている構成要素は、エンジン7の1気筒分のみ説明を行う。
図1、図2を参照して、エンジン7は、例えば、水冷式の並列4気筒エンジンである。以下、エンジン7の気筒ごとに設けられている構成要素は、エンジン7の1気筒分のみ説明を行う。
エンジン7は、クランクケース21と、クランクケース21の上方に配置されるシリンダブロック22と、シリンダブロック22の上方に配置されるシリンダヘッド23と、シリンダヘッド23を上方から覆うシリンダヘッドカバー24と、を備えている。
図2を参照して、クランクケース21には、クランク軸25が収容されている。クランク軸25は、左右方向(車幅方向)を長手方向としている。クランク軸25は、所定の回転方向に回転する(図2の矢印R1参照)。
シリンダブロック22には、ピストン26が収容されている。ピストン26は、コネクティングロッド27を介してクランク軸25に接続されている。
シリンダブロック22とシリンダヘッド23の間には、燃焼室31が設けられている。シリンダヘッド23の後壁部には吸気ポート32が開口され、シリンダヘッド23の前壁部には排気ポート33が開口されている。吸気ポート32及び排気ポート33は、燃焼室31と連通している。シリンダヘッド23には、燃焼室31を開閉する吸気バルブ34及び排気バルブ35が取り付けられている。シリンダヘッド23には、燃焼室31内の混合気に点火する点火プラグ36が取り付けられている。
(吸気装置8)
図2を参照して、吸気装置8は、エアクリーナ41と、エアクリーナ41とエンジン7を接続する吸気管42と、吸気管42に配置されるスロットルバルブ43と、を備えている。吸気管42は、エンジン7の吸気ポート32と共に、吸気通路44を構成している。以下、吸気装置8の構成要素について「上流側」又は「下流側」と記載する場合には、吸気通路44内における空気の流れ方向(図2の実線矢印参照)における「上流側」又は「下流側」を示す。
図2を参照して、吸気装置8は、エアクリーナ41と、エアクリーナ41とエンジン7を接続する吸気管42と、吸気管42に配置されるスロットルバルブ43と、を備えている。吸気管42は、エンジン7の吸気ポート32と共に、吸気通路44を構成している。以下、吸気装置8の構成要素について「上流側」又は「下流側」と記載する場合には、吸気通路44内における空気の流れ方向(図2の実線矢印参照)における「上流側」又は「下流側」を示す。
エアクリーナ41は、フィルタ46を備えている。フィルタ46は、エアクリーナ41の内部空間をダーティサイドS1(上流側の空間)とクリーンサイドS2(下流側の空間)に区画している。
吸気管42の上流側の端部は、エアクリーナ41のクリーンサイドS2に接続されている。吸気管42の下流側の端部は、エンジン7の吸気ポート32に接続されている。
(排気装置9)
図2を参照して、排気装置9は、排気管51と、排気管51内に配置される触媒52と、を備えている。排気管51は、エンジン7の排気ポート33と共に、排気通路53を構成している。以下、排気装置9の構成要素について「上流側」又は「下流側」と記載する場合には、排気通路53内における排気ガスの流れ方向(図2の点線矢印参照)における「上流側」又は「下流側」を示す。
図2を参照して、排気装置9は、排気管51と、排気管51内に配置される触媒52と、を備えている。排気管51は、エンジン7の排気ポート33と共に、排気通路53を構成している。以下、排気装置9の構成要素について「上流側」又は「下流側」と記載する場合には、排気通路53内における排気ガスの流れ方向(図2の点線矢印参照)における「上流側」又は「下流側」を示す。
排気管51の上流側の端部は、エンジン7の排気ポート33に接続されている。排気管51の下流側の端部は、マフラ(図示せず)に接続されている。
触媒52は、例えば、ハニカム構造の三元触媒によって構成されている。触媒52は、排気管51内を流れる排気ガス中の有害成分(例えば、一酸化炭素、炭化水素、窒素酸化物)を化学反応によって無害成分(例えば、二酸化炭素、水、窒素)に変化させることで、排気管51内を流れる排気ガスを浄化する。
(二次エア供給装置10)
図2を参照して、二次エア供給装置10は、二次エア供給通路61と、二次エア供給通路61に配置されるエアポンプ62、制御バルブ63及びリードバルブ64と、を備えている。以下、二次エア供給装置10の構成要素について「上流側」又は「下流側」と記載する場合には、二次エア供給通路61内における二次エアの流れ方向(図2の二点鎖線矢印参照)における「上流側」又は「下流側」を示す。
図2を参照して、二次エア供給装置10は、二次エア供給通路61と、二次エア供給通路61に配置されるエアポンプ62、制御バルブ63及びリードバルブ64と、を備えている。以下、二次エア供給装置10の構成要素について「上流側」又は「下流側」と記載する場合には、二次エア供給通路61内における二次エアの流れ方向(図2の二点鎖線矢印参照)における「上流側」又は「下流側」を示す。
二次エア供給通路61は、エンジン7の外部に設けられる第1〜第3配管61a〜61cと、エンジン7の内部に設けられるエンジン内通路61dと、を備えている。第1配管61aは、エアクリーナ41のクリーンサイドS2とエアポンプ62を接続している。第2配管61bは、エアポンプ62と制御バルブ63を接続している。第3配管61cは、制御バルブ63とリードバルブ64を接続している。エンジン内通路61dは、リードバルブ64とエンジン7の排気ポート33を接続している。
エアポンプ62は、駆動軸62aと、駆動軸62aの外周に設けられるファン62bと、駆動軸62aに接続されるモータ(図示せず)と、を備えている。駆動軸62a及びファン62bは、モータの駆動力によって、エンジン7のクランク軸25と同一の回転方向に回転する(図2の矢印R2参照)。つまり、エアポンプ62は、電動式である。駆動軸62aは、左右方向を軸方向としている。駆動軸62aは、エンジン7のクランク軸25と平行に配置されている。ファン62bは、放射状に配置された複数の羽根(図示せず)を備えている。
制御バルブ63は、エアポンプ62よりも下流側に配置されている。制御バルブ63は、例えば、ソレノイドバルブによって構成されている。制御バルブ63は、バルブ制御部84(詳細は後述)からの制御信号によって開閉する。
リードバルブ64は、制御バルブ63よりも下流側に配置されている。リードバルブ64は、大気圧(リードバルブ64よりも上流側の圧力)と排気通路53内の圧力(リードバルブ64よりも下流側の圧力)の差圧によって開閉する。リードバルブ64は、エンジン7の排気ポート33を流れる排気ガスが二次エア供給通路61を通ってエアクリーナ41へと逆流するのを抑制する逆止弁である。
(制御装置11)
図2を参照して、制御装置11は、各種センサ71〜79と、各種センサ71〜79に接続されるECU80(Engine Control Unit)と、を備えている。
図2を参照して、制御装置11は、各種センサ71〜79と、各種センサ71〜79に接続されるECU80(Engine Control Unit)と、を備えている。
傾斜センサ71(状態検出部の一例)は、例えば、ジャイロセンサ及び加速度センサによって構成されている。傾斜センサ71は、自動二輪車1の左右方向の傾斜角度(自動二輪車1の状態の一例)を検出し、検出結果をECU80に出力する。
車速センサ72(状態検出部の一例)は、前輪4又は後輪6の近傍に配置されている。車速センサ72は、前輪4又は後輪6の回転数(以下、「車輪回転数」と称する)を検出することで、自動二輪車1の車速(自動二輪車1の状態の一例)を検出し、検出結果をECU80に出力する。
水温センサ73は、エンジン7の冷却水通路に配置されている。水温センサ73は、エンジン7の冷却水の温度(以下、「エンジン7の水温」と称する)を検出し、検出結果をECU80に出力する。
油温センサ74は、エンジン7のオイル通路に配置されている。油温センサ74は、エンジン7の潤滑オイルの温度(以下、「エンジン7の油温」と称する)を検出し、検出結果をECU80に出力する。
スロットルポジションセンサ75は、スロットルバルブ43の近傍に配置されている。スロットルポジションセンサ75は、スロットルバルブ43の開度(以下、「スロットル開度」と称する)を検出し、検出結果をECU80に出力する。
クランクポジションセンサ76は、エンジン7のクランク軸25の近傍に配置されている。クランクポジションセンサ76は、クランク軸25の回転数(以下、「クランク回転数」と称する)及びクランク軸25の角度を検出し、検出結果をECU80に出力する。
酸素センサ77は、触媒52の上流側において排気管51に取り付けられている。酸素センサ78は、触媒52の下流側において排気管51に取り付けられている。各酸素センサ77、78は、排気管51を流れる排気ガス中の酸素濃度を検出し、検出結果をECU80に出力する。
触媒温度センサ79は、触媒52に取り付けられている。触媒温度センサ79は、触媒52の温度を検出し、検出結果をECU80に出力する。
ECU80は、各種センサ71〜79の検出結果に応じてエンジン7を制御している。ECU80は、点火プラグ36に接続されており、各種センサ71〜79の検出結果に応じて点火プラグ36の点火回数や点火タイミングを制御している。また、ECU80は、スロットルバルブ43に接続されており、各種センサ71〜79の検出結果に応じてスロットル開度を制御している。なお、図2では、ECU80と点火プラグ36を繋ぐ配線やECU80とスロットルバルブ43を繋ぐ配線の表示が省略されている。
ECU80は、条件判定部81を備えている。条件判定部81は、水温センサ73又は油温センサ74の検出結果に基づいてエアポンプ62が駆動条件を満たしているか否かを判定する。例えば、条件判定部81は、エンジン7の水温又は油温が所定の基準温度以下である場合には、エアポンプ62が駆動条件を満たしていると判定する。一方で、条件判定部81は、エンジン7の水温又は油温が上記基準温度を超える場合には、エアポンプ62が駆動条件を満たしていないと判定する。同様に、条件判定部81は、エアポンプ62が停止条件を満たしているか否かを判定する。
ECU80は、旋回判定部82を備えている。旋回判定部82は、傾斜センサ71及び車速センサ72の検出結果に基づいて自動二輪車1が旋回しているか否かを判定する。例えば、旋回判定部82は、傾斜センサ71が検出する自動二輪車1の左右方向の傾斜角度が所定の基準値以上であり、且つ、車速センサ72が検出する自動二輪車1の車速が所定の基準範囲内である場合には、自動二輪車1が旋回していると判定する。一方で、旋回判定部82は、傾斜センサ71が検出する自動二輪車1の左右方向の傾斜角度が上記基準値未満である場合や、車速センサ72が検出する自動二輪車1の車速が上記基準範囲外である場合には、自動二輪車1が旋回していないと判定する。
ECU80は、ポンプ制御部83を備えている。ポンプ制御部83は、エアポンプ62に接続されており、エンジン7及び触媒52の状態に応じてエアポンプ62の回転数(以下、「ポンプ回転数」と称する)を制御している。
ECU80は、バルブ制御部84を備えている。バルブ制御部84は、制御バルブ63に接続されており、エンジン7及び触媒52の状態に応じて制御バルブ63を制御している。
(エンジン7の吸排気)
図2を参照して、エンジン7の駆動時には、自動二輪車1の前方の空気がエアクリーナ41のダーティサイドS1に吸入される。エアクリーナ41のダーティサイドS1に吸入された空気は、エアクリーナ41のフィルタ46によって浄化された後、エアクリーナ41のクリーンサイドS2から吸気管42に導入される。吸気管42に導入された空気は、吸気管42と吸気ポート32を順次流れて、燃焼室31に導入される。
図2を参照して、エンジン7の駆動時には、自動二輪車1の前方の空気がエアクリーナ41のダーティサイドS1に吸入される。エアクリーナ41のダーティサイドS1に吸入された空気は、エアクリーナ41のフィルタ46によって浄化された後、エアクリーナ41のクリーンサイドS2から吸気管42に導入される。吸気管42に導入された空気は、吸気管42と吸気ポート32を順次流れて、燃焼室31に導入される。
また、エンジン7の駆動時には、燃焼室31から排気ガスが排出される。燃焼室31から排出された排気ガスは、排気ポート33と排気管51を順次流れて、触媒52によって浄化された後、マフラ(図示せず)を介して自動二輪車1の後方に排出される。
(触媒52への二次エアの供給)
図2を参照して、触媒52に二次エアを供給する時には、バルブ制御部84からの制御信号によって制御バルブ63が開放されると共に、ポンプ制御部83からの制御信号によってエアポンプ62のモータ(図示せず)が駆動する。このようにエアポンプ62のモータが駆動すると、エアポンプ62の駆動軸62a及びファン62bが回転する。これに伴って、エアクリーナ41のクリーンサイドS2から第1配管61aに導入された二次エアが、第1配管61a、エアポンプ62、第2配管61b、制御バルブ63、第3配管61c、リードバルブ64、エンジン内通路61dを順次流れて、排気ポート33に供給される。つまり、エアポンプ62は、エアクリーナ41のクリーンサイドS2から供給される二次エアを排気ポート33に向けて送り出す。
図2を参照して、触媒52に二次エアを供給する時には、バルブ制御部84からの制御信号によって制御バルブ63が開放されると共に、ポンプ制御部83からの制御信号によってエアポンプ62のモータ(図示せず)が駆動する。このようにエアポンプ62のモータが駆動すると、エアポンプ62の駆動軸62a及びファン62bが回転する。これに伴って、エアクリーナ41のクリーンサイドS2から第1配管61aに導入された二次エアが、第1配管61a、エアポンプ62、第2配管61b、制御バルブ63、第3配管61c、リードバルブ64、エンジン内通路61dを順次流れて、排気ポート33に供給される。つまり、エアポンプ62は、エアクリーナ41のクリーンサイドS2から供給される二次エアを排気ポート33に向けて送り出す。
上記のように排気ポート33に供給された二次エアは、排気ポート33と排気管51を順次流れて、触媒52に供給される。これにより、触媒52による排気ガスの浄化性能が向上する。なお、触媒52への二次エアの供給を停止する時には、ポンプ制御部83からの制御信号によってエアポンプ62のモータの駆動が停止すると共に、バルブ制御部84からの制御信号によって制御バルブ63が閉止される。
(第1制御例)
以下、図3を参照しつつ、自動二輪車1の第1制御例について説明する。第1制御例は、ポンプ回転数を目標値N(N≠0)まで上昇させるための制御例である。
以下、図3を参照しつつ、自動二輪車1の第1制御例について説明する。第1制御例は、ポンプ回転数を目標値N(N≠0)まで上昇させるための制御例である。
第1制御例がスタートすると、条件判定部81は、エアポンプ62が駆動条件を満たしているか否かを判定する(ステップS101)。ステップS101の判定がNoの場合には、ポンプ制御部83がエアポンプ62を駆動させることなく、第1制御例が終了する。
一方で、ステップS101の判定がYesの場合には、旋回判定部82は、自動二輪車1が旋回しているか否かを判定する(ステップS102)。
ステップS102の判定がNoの場合には、ポンプ制御部83は、ポンプ回転数をT1秒で素早く目標値Nまで上昇させる(ステップS103)。
一方で、ステップS102の判定がYesの場合には、ポンプ制御部83は、ポンプ回転数をT1+X秒掛けて目標値Nまで上昇させる(ステップS104)。つまり、ポンプ制御部83は、ステップS102の判定がYesの場合には、ステップS102の判定がNoの場合よりも時間を掛けてポンプ回転数を目標値Nまで上昇させる。具体的には、ポンプ制御部83は、ステップS102の判定がYesの場合には、ステップS102の判定がNoの場合よりもポンプ回転数の上昇速度を減少させる。
(第2制御例)
以下、図4を参照しつつ、自動二輪車1の第2制御例について説明する。第2制御例は、エアポンプ62を停止させるための制御例である。言い換えると、第2制御例は、ポンプ回転数を目標値0まで下降させるための制御例である。
以下、図4を参照しつつ、自動二輪車1の第2制御例について説明する。第2制御例は、エアポンプ62を停止させるための制御例である。言い換えると、第2制御例は、ポンプ回転数を目標値0まで下降させるための制御例である。
第2制御例がスタートすると、条件判定部81は、エアポンプ62が停止条件を満たしているか否かを判定する(ステップS201)。ステップS201の判定がNoの場合には、ポンプ制御部83がエアポンプ62を停止させることなく、第2制御例が終了する。
一方で、ステップS201の判定がYesの場合には、旋回判定部82は、自動二輪車1が旋回しているか否かを判定する(ステップS202)。
ステップS202の判定がNoの場合には、ポンプ制御部83は、エアポンプ62をT2秒で素早く停止させる(ステップS203)。
一方で、ステップS202の判定がYesの場合には、ポンプ制御部83は、エアポンプ62をT2+Y秒掛けて停止させる(ステップS204)。つまり、ポンプ制御部83は、ステップS202の判定がYesの場合には、ステップS202の判定がNoの場合よりも時間を掛けてエアポンプ62を停止させる。具体的には、ポンプ制御部83は、ステップS202の判定がYesの場合には、ステップS202の判定がNoの場合よりもポンプ回転数の下降速度を減少させる。
(第3制御例)
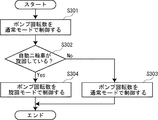
以下、図5を参照しつつ、自動二輪車1の第3制御例について説明する。第3制御例は、複数の制御内容でポンプ回転数を制御するための制御例である。
以下、図5を参照しつつ、自動二輪車1の第3制御例について説明する。第3制御例は、複数の制御内容でポンプ回転数を制御するための制御例である。
第3制御例がスタートすると、ポンプ制御部83は、ポンプ回転数を通常モードで制御する(ステップS301)。この通常モードでは、ポンプ制御部83は、触媒52による排気ガスの浄化性能を向上させるために必要な二次エアの供給量に応じて、ポンプ回転数を制御する。例えば、ポンプ制御部83は、各酸素センサ77、78が検出する排気ガス中の酸素濃度又は触媒温度センサ79が検出する触媒52の温度に応じて、ポンプ回転数を制御する。
次に、旋回判定部82は、自動二輪車1が旋回しているか否かを判定する(ステップS302)。
ステップS302の判定がNoの場合には、ポンプ制御部83は、ステップS301と同様に、ポンプ回転数を通常モードで制御する(ステップS303)。つまり、ステップS302の判定がNoの場合には、ポンプ制御部83は、第3制御例のスタート時と同一の制御内容でポンプ回転数を制御する。
一方で、ステップS302の判定がYesの場合には、ポンプ制御部83は、ポンプ回転数を旋回モードで制御する(ステップS304)。この旋回モードでは、ポンプ制御部83は、適切な大きさのジャイロ効果を発生させるように、ポンプ回転数を制御する。以下、旋回モードの例1〜例4について説明する。
(旋回モードの例1)
旋回モードの例1では、ポンプ制御部83は、スロットルポジションセンサ75が検出するスロットル開度に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるスロットル開度とポンプ回転数を基準に、Δt秒ごとのスロットル開度の変化にポンプ回転数の変化を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間にスロットル開度が上昇した場合にはポンプ回転数も上昇させ、ステップS302の時点からΔt秒間にスロットル開度が下降した場合にはポンプ回転数も下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。
旋回モードの例1では、ポンプ制御部83は、スロットルポジションセンサ75が検出するスロットル開度に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるスロットル開度とポンプ回転数を基準に、Δt秒ごとのスロットル開度の変化にポンプ回転数の変化を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間にスロットル開度が上昇した場合にはポンプ回転数も上昇させ、ステップS302の時点からΔt秒間にスロットル開度が下降した場合にはポンプ回転数も下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。
(旋回モードの例2)
旋回モードの例2では、ポンプ制御部83は、クランクポジションセンサ76が検出するクランク回転数に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるクランク回転数とポンプ回転数を基準に、Δt秒ごとのクランク回転数の変化率にポンプ回転数の変化率を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間にクランク回転数が10%上昇した場合にはポンプ回転数も10%上昇させ、ステップS302の時点からΔt秒間にクランク回転数が10%下降した場合にはポンプ回転数も10%下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。なお、この場合、クランク回転数の変化率(上記の例では10%)とポンプ回転数の変化率(上記の例では10%)は一致しているのが好ましいが、クランク回転数自体とポンプ回転数自体は必ずしも一致していなくても良い。
旋回モードの例2では、ポンプ制御部83は、クランクポジションセンサ76が検出するクランク回転数に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるクランク回転数とポンプ回転数を基準に、Δt秒ごとのクランク回転数の変化率にポンプ回転数の変化率を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間にクランク回転数が10%上昇した場合にはポンプ回転数も10%上昇させ、ステップS302の時点からΔt秒間にクランク回転数が10%下降した場合にはポンプ回転数も10%下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。なお、この場合、クランク回転数の変化率(上記の例では10%)とポンプ回転数の変化率(上記の例では10%)は一致しているのが好ましいが、クランク回転数自体とポンプ回転数自体は必ずしも一致していなくても良い。
(旋回モードの例3)
旋回モードの例3では、ポンプ制御部83は、車速センサ72が検出する車輪回転数に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)における車輪回転数とポンプ回転数を基準に、Δt秒ごとの車輪回転数の変化率にポンプ回転数の変化率を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間に車輪回転数が10%上昇した場合にはポンプ回転数も10%上昇させ、ステップS302の時点からΔt秒間に車輪回転数が10%下降した場合にはポンプ回転数も10%下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。なお、この場合、車輪回転数の変化率(上記の例では10%)とポンプ回転数の変化率(上記の例では10%)は一致しているのが好ましいが、車輪回転数自体とポンプ回転数自体は必ずしも一致していなくても良い。
旋回モードの例3では、ポンプ制御部83は、車速センサ72が検出する車輪回転数に応じてポンプ回転数を制御する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)における車輪回転数とポンプ回転数を基準に、Δt秒ごとの車輪回転数の変化率にポンプ回転数の変化率を追従させる。例えば、ポンプ制御部83は、ステップS302の時点からΔt秒間に車輪回転数が10%上昇した場合にはポンプ回転数も10%上昇させ、ステップS302の時点からΔt秒間に車輪回転数が10%下降した場合にはポンプ回転数も10%下降させる(それ以降も、Δt秒ごとに同様の制御が繰り返される)。なお、この場合、車輪回転数の変化率(上記の例では10%)とポンプ回転数の変化率(上記の例では10%)は一致しているのが好ましいが、車輪回転数自体とポンプ回転数自体は必ずしも一致していなくても良い。
(旋回モードの例4)
旋回モードの例4では、ポンプ制御部83は、自動二輪車1が旋回していないと旋回判定部82が判定するまで、ポンプ回転数を固定する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるポンプ回転数を基準に、自動二輪車1が旋回していないと旋回判定部82が判定するまで、ポンプ回転数の目標値を一定に保つ。
旋回モードの例4では、ポンプ制御部83は、自動二輪車1が旋回していないと旋回判定部82が判定するまで、ポンプ回転数を固定する。具体的には、ポンプ制御部83は、ステップS302の時点(自動二輪車1が旋回しているか否かを判定した時点)におけるポンプ回転数を基準に、自動二輪車1が旋回していないと旋回判定部82が判定するまで、ポンプ回転数の目標値を一定に保つ。
なお、旋回モードの例4の実行中には、旋回判定部82は、自動二輪車1が旋回しているか否かの判定を定期的に繰り返す。ポンプ制御部83は、自動二輪車1が旋回していると旋回判定部82が判定している間は、ポンプ回転数の制御モードを旋回モードのまま維持する。一方で、ポンプ制御部83は、自動二輪車1が旋回していないと旋回判定部82が判定した時点で、ポンプ回転数の制御モードを旋回モードから通常モードに復帰させる。
(第4制御例)
以下、図6〜図8を参照しつつ、自動二輪車1の第4制御例について説明する。第4制御例は、ポンプ回転数の目標値を設定するための制御例である。
以下、図6〜図8を参照しつつ、自動二輪車1の第4制御例について説明する。第4制御例は、ポンプ回転数の目標値を設定するための制御例である。
第4制御例がスタートすると、旋回判定部82は、自動二輪車1が旋回しているか否かを判定する(ステップS401)。
ステップS401の判定がNoの場合には、ポンプ制御部83は、ポンプ回転数の目標値をZに設定する(ステップS402)。その際に、ポンプ制御部83は、触媒52による排気ガスの浄化性能を向上させるために必要な二次エアの供給量に応じて、Zの値を決定する。例えば、ポンプ制御部83は、各酸素センサ77、78が検出する排気ガス中の酸素濃度又は触媒温度センサ79が検出する触媒52の温度に応じて、Zの値を決定する。
一方で、ステップS401の判定がYesの場合には、ECU80は、後輪6の空転を抑制するためのトラクションコントロールを介入させる(ステップS403)。このトラクションコントロールでは、ECU80は、後輪6の空転しやすさに関連する検出値(例えば、傾斜センサ71が検出する自動二輪車1の左右方向の傾斜角度)に基づいてトラクションコントロールの制御量(例えば、点火カットの実行頻度)を決定する。
次に、ECU80は、トラクションコントロールの制御量が閾値Th1以上であるか否かを判定する(ステップS404)。
ステップS404の判定がYesの場合には、トラクションコントロールの制御量が「大」である。この場合、ポンプ制御部83は、ポンプ回転数の目標値をAに設定する(ステップS405)。
一方で、ステップS404の判定がNoの場合には、ECU80は、トラクションコントロールの制御量が閾値Th2(但し、Th2<Th1)以上であるか否かを判定する(ステップS406)。
ステップS406の判定がYesの場合には、トラクションコントロールの制御量が「中」である。この場合、ポンプ制御部83は、ポンプ回転数の目標値をBに設定する(ステップS407)。
一方で、ステップS406の判定がNoの場合には、トラクションコントロールの制御量が「小」である。この場合、ポンプ制御部83は、ポンプ回転数の目標値をCに設定する(ステップS408)。
上記のようにポンプ回転数の目標値A〜Cを設定する際に、ポンプ制御部83は、目標値A>目標値B>目標値Cとなるように目標値A〜Cを設定しても良い(図7参照)。つまり、ポンプ制御部83は、トラクションコントロールの制御量に比例するように目標値A〜Cを変化させても良い。これにより、トラクションコントロールの制御量が大きくなるのに従ってエアポンプ62の回転に伴うジャイロ効果も大きくなり、自動二輪車1の安定性が向上する。
一方で、上記のようにポンプ回転数の目標値A〜Cを設定する際に、ポンプ制御部83は、目標値A<目標値B<目標値Cとなるように目標値A〜Cを設定しても良い(図8参照)。つまり、ポンプ制御部83は、トラクションコントロールの制御量に反比例するように目標値A〜Cを変化させても良い。これにより、トラクションコントロールの制御量が大きくなるのに従ってエアポンプ62の回転に伴うジャイロ効果が小さくなり、自動二輪車1の旋回性が向上する。
(効果)
上記した第1〜第4制御例では、ポンプ制御部83は、旋回判定部82の判定結果に応じてポンプ回転数に対する制御内容を変えている。そのため、自動二輪車1の旋回時に適切な大きさのジャイロ効果を発生させることができ、自動二輪車1の旋回時における操作性を向上させることができる。
上記した第1〜第4制御例では、ポンプ制御部83は、旋回判定部82の判定結果に応じてポンプ回転数に対する制御内容を変えている。そのため、自動二輪車1の旋回時に適切な大きさのジャイロ効果を発生させることができ、自動二輪車1の旋回時における操作性を向上させることができる。
また、上記のように自動二輪車1の旋回時に適切な大きさのジャイロ効果を発生させることができるため、自動二輪車1の旋回時にジャイロ効果の影響を懸念してエアポンプ62の駆動を停止させる必要がない。そのため、自動二輪車1の旋回時もエアポンプ62を駆動させることができ、エアポンプ62の駆動時間を増加させて、触媒52による排気ガスの浄化性能を向上させることができる。
また、上記した第1、第2制御例では、ポンプ制御部83は、自動二輪車1が旋回していると旋回判定部82が判定した場合に、自動二輪車1が旋回していないと旋回判定部82が判定した場合よりも時間を掛けて、ポンプ回転数を目標値(第1制御例ではN、第2制御例では0)に到達させている。このような制御を実行することで、自動二輪車1の旋回時におけるポンプ回転数の急激な変化を抑制することができる。そのため、自動二輪車1の旋回時におけるジャイロ効果の急激な変化も抑制することができ、自動二輪車1の旋回時における操作性を一層向上させることができる。
また、上記した第3制御例の旋回モードの例1では、ポンプ制御部83は、スロットル開度に応じてポンプ回転数を制御している。このような制御を実行することで、自動二輪車1の旋回時に、ライダーによるスロットル開度の操作に合わせてポンプ回転数を変化させることができる。そのため、ポンプ回転数の変化に伴ってジャイロ効果が変化しても、ライダーが違和感を覚えにくくなる。
また、上記した第3制御例の旋回モードの例2では、ポンプ制御部83は、クランク回転数に応じてポンプ回転数を制御している。このような制御を実行することで、自動二輪車1の旋回時に、クランク軸25の回転により発生する大きなジャイロ効果の変化に、エアポンプ62の回転により発生するジャイロ効果の変化を同調させることができる。そのため、ポンプ回転数の変化に伴ってジャイロ効果が変化しても、ライダーが違和感を覚えにくくなる。
また、上記した第3制御例の旋回モードの例3では、ポンプ制御部83は、車輪回転数に応じてポンプ回転数を制御している。このような制御を実行することで、自動二輪車1の旋回時に、前輪4又は後輪6の回転により発生する大きなジャイロ効果の変化に、エアポンプ62の回転により発生するジャイロ効果の変化を同調させることができる。そのため、ポンプ回転数の変化に伴ってジャイロ効果が変化しても、ライダーが違和感を覚えにくくなる。
また、上記した第3制御例の旋回モードの例4では、ポンプ制御部83は、自動二輪車1が旋回していると旋回判定部82が判定した場合に、自動二輪車1が旋回していないと旋回判定部82が判定するまで、ポンプ回転数を固定している。これに伴って、自動二輪車1の旋回時に、ポンプ回転数の変化に伴うジャイロ効果の変化を無くすことができ、ライダーが違和感を覚えにくくなる。
また、上記した第4制御例では、ポンプ制御部83は、トラクションコントロールの制御量に応じてポンプ回転数の目標値を変化させている。このような制御を実行することで、トラクションコントロールの制御量に応じた適切な大きさのジャイロ効果を発生させることができ、ライダーが違和感を覚えにくくなる。
特に、上記した第4制御例では、トラクションコントロールの制御量に比例するようにポンプ回転数の目標値を変化させるか、又は、トラクションコントロールの制御量に反比例するようにポンプ回転数の目標値を変化させるかを、選択可能となっている。そのため、エアポンプ62の搭載位置、エアポンプ62の回転方向、自動二輪車1の車両特性等を考慮した上で、ポンプ回転数の目標値を適切に設定することができる。
(変形例)
本実施例では、傾斜センサ71及び車速センサ72を状態検出部として用いている。一方で、他の異なる実施例では、水温センサ73、油温センサ74、スロットルポジションセンサ75、クランクポジションセンサ76、各酸素センサ77、78、触媒温度センサ79、エンジン温度センサ(エンジン7のクランクケース21、シリンダブロック22又はシリンダヘッド23等の温度を検出するセンサ)、吸気温度センサ(エンジン7の吸気温度を検出するセンサ)、吸気量センサ(エンジン7の吸気量を検出するセンサ)、吸気圧センサ(エンジン7の吸気圧を検出するセンサ)、排気温度センサ(エンジン7の排気温度を検出するセンサ)、エキゾーストバルブポジションセンサ(排気管51に設置されたエキゾーストバルブの開度を検出するセンサ)、カムポジションセンサ(吸気バルブ34及び排気バルブ35を駆動させる動弁機構に設けられたカムの位置を検出するセンサ)、ギヤポジションセンサ(変速装置のギヤポジションを検出するセンサ)、慣性センサ(自動二輪車1の加速度及び角速度を検出するセンサ)、加速度センサ(自動二輪車1の加速度を検出するセンサ)、サスストロークセンサ(サスペンションのストローク位置を検出するセンサ)、サス荷重センサ(サスペンションの荷重を検出するセンサ)、ブレーキスイッチ(ブレーキのON/OFFを検出するスイッチ)、ブレーキ油圧センサ(ブレーキの油圧を検出するセンサ)、GPS(Global Positioning System)等を状態検出部として用いても良い。
本実施例では、傾斜センサ71及び車速センサ72を状態検出部として用いている。一方で、他の異なる実施例では、水温センサ73、油温センサ74、スロットルポジションセンサ75、クランクポジションセンサ76、各酸素センサ77、78、触媒温度センサ79、エンジン温度センサ(エンジン7のクランクケース21、シリンダブロック22又はシリンダヘッド23等の温度を検出するセンサ)、吸気温度センサ(エンジン7の吸気温度を検出するセンサ)、吸気量センサ(エンジン7の吸気量を検出するセンサ)、吸気圧センサ(エンジン7の吸気圧を検出するセンサ)、排気温度センサ(エンジン7の排気温度を検出するセンサ)、エキゾーストバルブポジションセンサ(排気管51に設置されたエキゾーストバルブの開度を検出するセンサ)、カムポジションセンサ(吸気バルブ34及び排気バルブ35を駆動させる動弁機構に設けられたカムの位置を検出するセンサ)、ギヤポジションセンサ(変速装置のギヤポジションを検出するセンサ)、慣性センサ(自動二輪車1の加速度及び角速度を検出するセンサ)、加速度センサ(自動二輪車1の加速度を検出するセンサ)、サスストロークセンサ(サスペンションのストローク位置を検出するセンサ)、サス荷重センサ(サスペンションの荷重を検出するセンサ)、ブレーキスイッチ(ブレーキのON/OFFを検出するスイッチ)、ブレーキ油圧センサ(ブレーキの油圧を検出するセンサ)、GPS(Global Positioning System)等を状態検出部として用いても良い。
本実施例では、エアポンプ62を駆動するタイミングと制御バルブ63を開放するタイミングを同期させている。一方で、他の異なる実施例では、エアポンプ62を駆動するタイミングと制御バルブ63を開放するタイミングをずらしても良い。例えば、エアポンプ62の回転に伴うジャイロ効果を発生させたいが触媒52に二次エアを供給したくない場合には、制御バルブ63を閉止した状態でエアポンプ62を駆動しても良い。
なお、このように制御バルブ63を閉止した状態でエアポンプ62を駆動する場合には、図9に示されるように、制御バルブ63よりも上流側において二次エア供給通路61に弁体91を設け、この弁体91とエアクリーナ41のクリーンサイドS2を補助配管92で接続するのが好ましい。このような構成を採用することで、制御バルブ63を閉止した状態でエアポンプ62を駆動した際に、二次エア供給通路61内の二次エアを弁体91及び補助配管92を介してエアクリーナ41のクリーンサイドS2に戻すことができる。そのため、二次エア供給通路61内の圧力が高まって配管61a、61bの接続が解除されるような不具合を抑制することができる。
本実施例では、エアポンプ62の駆動軸62a及びファン62bがエンジン7のクランク軸25と同一の回転方向に回転する。一方で、他の異なる実施例では、エアポンプ62の駆動軸62a及びファン62bがエンジン7のクランク軸25と逆の回転方向に回転しても良い。
本実施例では、燃焼室31への吸気用と二次エアの供給用に1個のエアクリーナ41を併用している。そのため、二次エアを供給するための専用のエアクリーナ41が不要となり、自動二輪車1の軽量化を図ることができる。一方で、他の異なる実施例では、燃焼室31への吸気用のエアクリーナ41と二次エアの供給用のエアクリーナ41を別個に設けても良い。
本実施例では、触媒52よりも上流側において二次エア供給通路61が排気ポート33に接続されている。一方で、他の異なる実施例では、触媒52よりも上流側において二次エア供給通路61が排気管51に接続されていても良い。
本実施例では、水冷式の並列4気筒エンジンをエンジン7の一例としている。一方で、他の異なる実施例では、空冷式エンジンや油冷式エンジン等、水冷式以外の冷却方式のエンジンをエンジン7の一例としても良い。また、他の異なる実施例では、並列2気筒エンジンやV型エンジン等、並列4気筒エンジン以外の多気筒エンジンをエンジン7の一例としても良いし、単気筒エンジンをエンジン7の一例としても良い。従って、エンジン7の内部には、燃焼室31が複数個形成されていても良いし、燃焼室31が1個だけ形成されていても良い。
本実施例では、オンロード型の自動二輪車1を鞍乗型車両の一例としている。一方で、他の異なる実施例では、オフロード型の自動二輪車を鞍乗型車両の一例としても良いし、自動三輪車等の自動二輪車以外の車両を鞍乗型車両の一例としても良い。
1 自動二輪車(鞍乗型車両の一例)
4 前輪(車輪の一例)
6 後輪(車輪の一例)
7 エンジン
25 クランク軸
31 燃焼室
41 エアクリーナ
43 スロットルバルブ
44 吸気通路
52 触媒
53 排気通路
61 二次エア供給通路
62 エアポンプ
71 傾斜センサ(状態検出部の一例)
72 車速センサ(状態検出部の一例)
82 旋回判定部
83 ポンプ制御部
4 前輪(車輪の一例)
6 後輪(車輪の一例)
7 エンジン
25 クランク軸
31 燃焼室
41 エアクリーナ
43 スロットルバルブ
44 吸気通路
52 触媒
53 排気通路
61 二次エア供給通路
62 エアポンプ
71 傾斜センサ(状態検出部の一例)
72 車速センサ(状態検出部の一例)
82 旋回判定部
83 ポンプ制御部
Claims (7)
- 少なくとも1個の燃焼室が内部に形成されたエンジンと、
前記燃焼室から排出された排気ガスが流れる排気通路と、
前記排気通路内に配置される触媒と、
前記触媒よりも上流側において前記排気通路に接続される二次エア供給通路と、
前記二次エア供給通路に接続されるエアクリーナと、
前記二次エア供給通路に配置され、前記エアクリーナから供給される二次エアを前記排気通路に向けて送り出すエアポンプと、
前記エアポンプの回転数を制御するポンプ制御部と、
鞍乗型車両の状態を検出する状態検出部と、
前記状態検出部の検出結果に基づいて前記鞍乗型車両が旋回しているか否かを判定する旋回判定部と、を備え、
前記ポンプ制御部は、前記旋回判定部の判定結果に応じて前記エアポンプの回転数に対する制御内容を変えることを特徴とする鞍乗型車両。 - 前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定した場合に、前記鞍乗型車両が旋回していないと前記旋回判定部が判定した場合よりも時間を掛けて、前記エアポンプの回転数を目標値に到達させることを特徴とする請求項1に記載の鞍乗型車両。
- 前記燃焼室に導入される空気が流れる吸気通路と、
前記吸気通路に配置されるスロットルバルブと、を更に備え、
前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定した場合に、前記スロットルバルブの開度に応じて前記エアポンプの回転数を制御することを特徴とする請求項1又は2に記載の鞍乗型車両。 - 前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定した場合に、前記エンジンのクランク軸の回転数に応じて前記エアポンプの回転数を制御することを特徴とする請求項1又は2に記載の鞍乗型車両。
- 前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定した場合に、車輪の回転数に応じて前記エアポンプの回転数を制御することを特徴とする請求項1又は2に記載の鞍乗型車両。
- 前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定した場合に、前記鞍乗型車両が旋回していないと前記旋回判定部が判定するまで、前記エアポンプの回転数を固定することを特徴とする請求項1〜5のいずれか1項に記載の鞍乗型車両。
- 前記ポンプ制御部は、前記鞍乗型車両が旋回していると前記旋回判定部が判定し、且つ、車輪の空転を抑制するためのトラクションコントロールが実行された場合に、前記トラクションコントロールの制御量に応じて前記エアポンプの回転数の目標値を変化させることを特徴とする請求項1〜6のいずれか1項に記載の鞍乗型車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018096431A JP2019199865A (ja) | 2018-05-18 | 2018-05-18 | 鞍乗型車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018096431A JP2019199865A (ja) | 2018-05-18 | 2018-05-18 | 鞍乗型車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019199865A true JP2019199865A (ja) | 2019-11-21 |
Family
ID=68613048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018096431A Pending JP2019199865A (ja) | 2018-05-18 | 2018-05-18 | 鞍乗型車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019199865A (ja) |
-
2018
- 2018-05-18 JP JP2018096431A patent/JP2019199865A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3236035B1 (en) | Straddled vehicle | |
| EP3165737B1 (en) | Saddle-driven vehicle and single-cylinder 4-stroke engine unit | |
| CN106661981B (zh) | 车辆和单缸四冲程发动机单元 | |
| JP6208353B2 (ja) | ビークルおよび単気筒4ストロークエンジンユニット | |
| CN106471229B (zh) | 车辆和单缸四冲程发动机单元 | |
| TWI700429B (zh) | 跨坐型車輛及單缸四衝程引擎單元 | |
| WO2016002958A1 (ja) | 鞍乗型車両 | |
| JP6690440B2 (ja) | 排気ガスセンサの配置構造 | |
| JP2019015277A (ja) | 排気ガスセンサの配置構造及び自動二輪車 | |
| JP2018115652A (ja) | 排気ガスセンサの配置構造 | |
| JP2019199865A (ja) | 鞍乗型車両 | |
| WO2016002951A1 (ja) | ビークルおよび単気筒4ストロークエンジンユニット | |
| WO2016002953A1 (ja) | 鞍乗型車両 | |
| WO2016002957A1 (ja) | 鞍乗型車両、及び、単気筒4ストロークエンジンユニット | |
| JP2010196633A (ja) | 鞍乗り型車両の吸気装置構造 | |
| JP6690441B2 (ja) | 排気ガスセンサの配置構造 | |
| WO2016002954A1 (ja) | 鞍乗型車両 | |
| JP2017150308A (ja) | エンジンユニットおよび乗り物 | |
| JP6011319B2 (ja) | 自動二輪車の吸気系 | |
| JP2019199866A (ja) | 鞍乗型車両 | |
| JP2019199867A (ja) | 鞍乗型車両 | |
| JP2013204514A (ja) | 可変気筒エンジンの排気装置 | |
| JP2019002301A (ja) | 排気装置 | |
| JP2010012914A (ja) | オフロードビークル |