JP2019201207A - 閉ループチャッキング力制御を用いたリアルタイム監視 - Google Patents
閉ループチャッキング力制御を用いたリアルタイム監視 Download PDFInfo
- Publication number
- JP2019201207A JP2019201207A JP2019091811A JP2019091811A JP2019201207A JP 2019201207 A JP2019201207 A JP 2019201207A JP 2019091811 A JP2019091811 A JP 2019091811A JP 2019091811 A JP2019091811 A JP 2019091811A JP 2019201207 A JP2019201207 A JP 2019201207A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- force
- chucking
- backside gas
- gas pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32697—Electrostatic control
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32009—Arrangements for generation of plasma specially adapted for examination or treatment of objects, e.g. plasma sources
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32715—Workpiece holder
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05H—PLASMA TECHNIQUE; PRODUCTION OF ACCELERATED ELECTRICALLY-CHARGED PARTICLES OR OF NEUTRONS; PRODUCTION OR ACCELERATION OF NEUTRAL MOLECULAR OR ATOMIC BEAMS
- H05H1/00—Generating plasma; Handling plasma
- H05H1/24—Generating plasma
- H05H1/46—Generating plasma using applied electromagnetic fields, e.g. high frequency or microwave energy
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0402—Apparatus for fluid treatment
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0602—Temperature monitoring
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0604—Process monitoring, e.g. flow or thickness monitoring
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0606—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/72—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using electrostatic chucks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/72—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using electrostatic chucks
- H10P72/722—Details of electrostatic chucks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P74/00—Testing or measuring during manufacture or treatment of wafers, substrates or devices
- H10P74/23—Testing or measuring during manufacture or treatment of wafers, substrates or devices characterised by multiple measurements, corrections, marking or sorting processes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/002—Cooling arrangements
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/20—Positioning, supporting, modifying or maintaining the physical state of objects being observed or treated
- H01J2237/2007—Holding mechanisms
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/245—Detection characterised by the variable being measured
- H01J2237/24571—Measurements of non-electric or non-magnetic variables
- H01J2237/24585—Other variables, e.g. energy, mass, velocity, time, temperature
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/32—Processing objects by plasma generation
- H01J2237/33—Processing objects by plasma generation characterised by the type of processing
- H01J2237/332—Coating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/32—Processing objects by plasma generation
- H01J2237/33—Processing objects by plasma generation characterised by the type of processing
- H01J2237/334—Etching
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32715—Workpiece holder
- H01J37/32724—Temperature
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0402—Apparatus for fluid treatment
- H10P72/0418—Apparatus for fluid treatment for etching
- H10P72/0421—Apparatus for fluid treatment for etching for drying etching
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7612—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by lifting arrangements, e.g. lift pins
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Electromagnetism (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Drying Of Semiconductors (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
【解決手段】この方法は、加工品を処理チャンバ内の静電チャックに配置することから開始する。プラズマが処理チャンバの中に与えられる。加工品にかかる撓み力が監視される。最小値のチャッキング電圧が加えられる。最小圧の裏側ガス圧が加えられる。チャッキング電圧および/または裏側ガス圧力は、撓み力が閾値未満になるように調整される。また、チャッキング電圧および裏側ガス圧は同時に引き上げられる。
【選択図】図1
Description
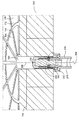
センサ280は、加工品101の撓みの変化を短い時間間隔で測定することができる。
702 第2の時間ブロック
703 第3の時間ブロック
704 第4の時間ブロック
705 第5の時間ブロック
706 第6の時間ブロック
707 第7の時間ブロック
708 第8の時間ブロック
740 チャッキング電圧
741 最小チャッキング電圧
742 チャッキング最小電圧
749 加工品を処理する、および/または加工品をESCに静電的に保持するのに適切なレベル
760 裏側ガス圧
762 最小ガス圧
763 裏側ガス最小圧
769 高い圧力
780 撓み力
Claims (11)
- プラズマ処理チャンバ内の静電チャック上に配置された加工品にかかるチャッキング力を最小限にする方法であって、
処理チャンバ内の静電チャック上に加工品を配置するステップと、
前記処理チャンバの中にプラズマを与えるステップと、
前記加工品にかかる撓み力を監視するステップと、
最小値のチャッキング電圧を加えるステップと、
最小圧の裏側ガス圧を加えるステップと、
前記撓み力が閾値未満になるように前記チャッキング電圧および/または裏側ガス圧を調整するステップと、
前記チャッキング電圧および前記裏側ガス圧を同時に引き上げるステップとを含む、方法。 - チャッキング解除のために前記方法を逆にするステップをさらに含む、請求項1に記載の方法。
- 前記チャッキング電圧力の最小値が前記裏側ガス圧の最小値未満である、請求項1に記載の方法。
- 前記加工品がチャッキングされるときに、前記裏側ガス圧の値が前記チャッキング電圧力の値未満である、請求項1に記載の方法。
- 前記撓み力が約50ミリトルから約50トルの間である、請求項1に記載の方法。
- 前記撓み力が約1トル以下である、請求項5に記載の方法。
- 前記プラズマを前記与えるステップと前記加工品を前記チャッキングするステップとの間に小さな時間遅延を導入するステップをさらに含む、請求項1に記載の方法。
- 前記小さな時間遅延が約200ミリ秒から約10秒の間である、請求項7に記載の方法。
- 前記チャッキング力および裏側ガス圧の閉ループ制御を設けるステップと、
前記閉ループ制御に応じて前記チャッキング力を最小限にするステップとをさらに含む、請求項1に記載の方法。 - クランプ力が目標合計クランプ力に到達し維持されるように、前記ESCへのクランプ電圧を調整するステップをさらに含む、請求項1に記載の方法。
- 前記最小値の前記チャッキング電圧を加えるステップがさらに、
最小力を得るように前記チャッキング電圧を選択するステップを含む、請求項1に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762506313P | 2017-05-15 | 2017-05-15 | |
| US15/979,787 US10460916B2 (en) | 2017-05-15 | 2018-05-15 | Real time monitoring with closed loop chucking force control |
| US15/979,787 | 2018-05-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019201207A true JP2019201207A (ja) | 2019-11-21 |
| JP7362293B2 JP7362293B2 (ja) | 2023-10-17 |
Family
ID=64096762
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019091811A Active JP7362293B2 (ja) | 2017-05-15 | 2019-05-15 | 閉ループチャッキング力制御を用いたリアルタイム監視 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10460916B2 (ja) |
| JP (1) | JP7362293B2 (ja) |
| KR (1) | KR102670418B1 (ja) |
| CN (1) | CN110491756B (ja) |
| TW (1) | TWI815889B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024507507A (ja) * | 2021-02-25 | 2024-02-20 | アプライド マテリアルズ インコーポレイテッド | プロセスシフトが発生した場合に調整されたチャッキング電圧を使用してチャッキング動作を実行するための方法、システム、及び装置 |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017209901A2 (en) * | 2016-06-03 | 2017-12-07 | Applied Materials, Inc. | Substrate distance monitoring |
| US10510575B2 (en) | 2017-09-20 | 2019-12-17 | Applied Materials, Inc. | Substrate support with multiple embedded electrodes |
| US10732615B2 (en) * | 2017-10-30 | 2020-08-04 | Varian Semiconductor Equipment Associates, Inc. | System and method for minimizing backside workpiece damage |
| US10555412B2 (en) | 2018-05-10 | 2020-02-04 | Applied Materials, Inc. | Method of controlling ion energy distribution using a pulse generator with a current-return output stage |
| US11054317B2 (en) * | 2018-09-28 | 2021-07-06 | Applied Materials, Inc. | Method and apparatus for direct measurement of chucking force on an electrostatic chuck |
| US11476145B2 (en) | 2018-11-20 | 2022-10-18 | Applied Materials, Inc. | Automatic ESC bias compensation when using pulsed DC bias |
| US11373890B2 (en) * | 2018-12-17 | 2022-06-28 | Applied Materials, Inc. | Wireless in-situ real-time measurement of electrostatic chucking force in semiconductor wafer processing |
| CN118315254A (zh) | 2019-01-22 | 2024-07-09 | 应用材料公司 | 用于控制脉冲电压波形的反馈回路 |
| US11508554B2 (en) | 2019-01-24 | 2022-11-22 | Applied Materials, Inc. | High voltage filter assembly |
| JP7599428B2 (ja) * | 2019-03-08 | 2024-12-13 | アプライド マテリアルズ インコーポレイテッド | 基板処理チャンバ向けのチャッキングのプロセス及びシステム |
| CN112750726B (zh) * | 2019-10-30 | 2024-12-31 | 台湾积体电路制造股份有限公司 | 半导体制程系统以及处理半导体晶圆的方法 |
| CN113035682B (zh) * | 2019-12-25 | 2023-03-31 | 中微半导体设备(上海)股份有限公司 | 一种下电极组件及其等离子体处理装置 |
| WO2021148195A1 (en) * | 2020-01-24 | 2021-07-29 | Evatec Ag | Phase shift controlled sputter system and process |
| TWI869928B (zh) * | 2020-03-20 | 2025-01-11 | 荷蘭商Asml荷蘭公司 | 用於檢查晶圓之系統及其相關非暫時性電腦可讀媒體 |
| KR20260042214A (ko) | 2020-07-06 | 2026-03-30 | 어플라이드 머티어리얼스, 인코포레이티드 | 온도 제어가 개선된 정전 척 |
| US11848176B2 (en) | 2020-07-31 | 2023-12-19 | Applied Materials, Inc. | Plasma processing using pulsed-voltage and radio-frequency power |
| CN116134721A (zh) * | 2020-08-05 | 2023-05-16 | 株式会社堀场Stec | 静电夹头装置、压力计算方法以及程序 |
| US11508608B2 (en) * | 2020-08-20 | 2022-11-22 | Taiwan Semiconductor Manufacturing Co., Ltd. | Vacuum wafer chuck for manufacturing semiconductor devices |
| US11798790B2 (en) | 2020-11-16 | 2023-10-24 | Applied Materials, Inc. | Apparatus and methods for controlling ion energy distribution |
| US11901157B2 (en) | 2020-11-16 | 2024-02-13 | Applied Materials, Inc. | Apparatus and methods for controlling ion energy distribution |
| US11495470B1 (en) | 2021-04-16 | 2022-11-08 | Applied Materials, Inc. | Method of enhancing etching selectivity using a pulsed plasma |
| US11791138B2 (en) | 2021-05-12 | 2023-10-17 | Applied Materials, Inc. | Automatic electrostatic chuck bias compensation during plasma processing |
| US11948780B2 (en) | 2021-05-12 | 2024-04-02 | Applied Materials, Inc. | Automatic electrostatic chuck bias compensation during plasma processing |
| US11967483B2 (en) | 2021-06-02 | 2024-04-23 | Applied Materials, Inc. | Plasma excitation with ion energy control |
| US12525441B2 (en) | 2021-06-09 | 2026-01-13 | Applied Materials, Inc. | Plasma chamber and chamber component cleaning methods |
| US12148595B2 (en) | 2021-06-09 | 2024-11-19 | Applied Materials, Inc. | Plasma uniformity control in pulsed DC plasma chamber |
| US20220399186A1 (en) | 2021-06-09 | 2022-12-15 | Applied Materials, Inc. | Method and apparatus to reduce feature charging in plasma processing chamber |
| US11810760B2 (en) | 2021-06-16 | 2023-11-07 | Applied Materials, Inc. | Apparatus and method of ion current compensation |
| US11569066B2 (en) | 2021-06-23 | 2023-01-31 | Applied Materials, Inc. | Pulsed voltage source for plasma processing applications |
| US11476090B1 (en) | 2021-08-24 | 2022-10-18 | Applied Materials, Inc. | Voltage pulse time-domain multiplexing |
| US12106938B2 (en) | 2021-09-14 | 2024-10-01 | Applied Materials, Inc. | Distortion current mitigation in a radio frequency plasma processing chamber |
| CN115810530B (zh) * | 2021-09-15 | 2025-02-14 | 江苏鲁汶仪器股份有限公司 | 离子束刻蚀机及其下电极结构 |
| US12497697B2 (en) * | 2021-10-08 | 2025-12-16 | Applied Materials, Inc. | Layer with discrete islands formed on a substrate support |
| US12341048B2 (en) * | 2021-11-29 | 2025-06-24 | Applied Materials, Inc. | Porous plug for electrostatic chuck gas delivery |
| US11694876B2 (en) | 2021-12-08 | 2023-07-04 | Applied Materials, Inc. | Apparatus and method for delivering a plurality of waveform signals during plasma processing |
| CN114582780B (zh) * | 2022-03-01 | 2022-12-23 | 江苏京创先进电子科技有限公司 | 太鼓晶圆去环方法及太鼓晶圆去环装置 |
| US11972924B2 (en) | 2022-06-08 | 2024-04-30 | Applied Materials, Inc. | Pulsed voltage source for plasma processing applications |
| US12315732B2 (en) | 2022-06-10 | 2025-05-27 | Applied Materials, Inc. | Method and apparatus for etching a semiconductor substrate in a plasma etch chamber |
| US12586768B2 (en) | 2022-08-10 | 2026-03-24 | Applied Materials, Inc. | Pulsed voltage compensation for plasma processing applications |
| US12272524B2 (en) | 2022-09-19 | 2025-04-08 | Applied Materials, Inc. | Wideband variable impedance load for high volume manufacturing qualification and on-site diagnostics |
| US12111341B2 (en) | 2022-10-05 | 2024-10-08 | Applied Materials, Inc. | In-situ electric field detection method and apparatus |
| US20250343067A1 (en) * | 2024-05-01 | 2025-11-06 | Applied Materials, Inc. | Volume reduction in semiconductor processing chamber |
| CN119472308B (zh) * | 2025-01-14 | 2025-04-25 | 广东芯华镁半导体技术有限公司 | 半导体设备控制系统的优化方法及系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04206546A (ja) * | 1990-11-30 | 1992-07-28 | Hitachi Ltd | プラズマ処理方法および装置 |
| JP2001351968A (ja) * | 2000-06-07 | 2001-12-21 | Mitsubishi Electric Corp | プラズマ処理装置およびプラズマ処理方法 |
| US20150138687A1 (en) * | 2013-11-19 | 2015-05-21 | Applied Materials, Inc. | Control systems employing deflection sensors to control clamping forces applied by electrostatic chucks, and related methods |
| JP2016139649A (ja) * | 2015-01-26 | 2016-08-04 | 住友大阪セメント株式会社 | 静電チャック装置 |
| JP2018530150A (ja) * | 2015-09-11 | 2018-10-11 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | リアルタイムの力および膜応力制御を備えた基板支持体 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8422193B2 (en) * | 2006-12-19 | 2013-04-16 | Axcelis Technologies, Inc. | Annulus clamping and backside gas cooled electrostatic chuck |
| US8313612B2 (en) * | 2009-03-24 | 2012-11-20 | Lam Research Corporation | Method and apparatus for reduction of voltage potential spike during dechucking |
| US9287092B2 (en) * | 2009-05-01 | 2016-03-15 | Advanced Energy Industries, Inc. | Method and apparatus for controlling ion energy distribution |
-
2018
- 2018-05-15 US US15/979,787 patent/US10460916B2/en active Active
-
2019
- 2019-05-13 KR KR1020190055863A patent/KR102670418B1/ko active Active
- 2019-05-15 JP JP2019091811A patent/JP7362293B2/ja active Active
- 2019-05-15 TW TW108116655A patent/TWI815889B/zh active
- 2019-05-15 CN CN201910406928.2A patent/CN110491756B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04206546A (ja) * | 1990-11-30 | 1992-07-28 | Hitachi Ltd | プラズマ処理方法および装置 |
| JP2001351968A (ja) * | 2000-06-07 | 2001-12-21 | Mitsubishi Electric Corp | プラズマ処理装置およびプラズマ処理方法 |
| US20150138687A1 (en) * | 2013-11-19 | 2015-05-21 | Applied Materials, Inc. | Control systems employing deflection sensors to control clamping forces applied by electrostatic chucks, and related methods |
| JP2016139649A (ja) * | 2015-01-26 | 2016-08-04 | 住友大阪セメント株式会社 | 静電チャック装置 |
| JP2018530150A (ja) * | 2015-09-11 | 2018-10-11 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | リアルタイムの力および膜応力制御を備えた基板支持体 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024507507A (ja) * | 2021-02-25 | 2024-02-20 | アプライド マテリアルズ インコーポレイテッド | プロセスシフトが発生した場合に調整されたチャッキング電圧を使用してチャッキング動作を実行するための方法、システム、及び装置 |
| JP7716486B2 (ja) | 2021-02-25 | 2025-07-31 | アプライド マテリアルズ インコーポレイテッド | プロセスシフトが発生した場合に調整されたチャッキング電圧を使用してチャッキング動作を実行するための方法、システム、及び装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20190130971A (ko) | 2019-11-25 |
| TW201947702A (zh) | 2019-12-16 |
| US10460916B2 (en) | 2019-10-29 |
| CN110491756A (zh) | 2019-11-22 |
| KR102670418B1 (ko) | 2024-05-28 |
| CN110491756B (zh) | 2024-03-29 |
| TWI815889B (zh) | 2023-09-21 |
| JP7362293B2 (ja) | 2023-10-17 |
| US20180330926A1 (en) | 2018-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102670418B1 (ko) | 폐쇄 루프 척킹력 제어를 이용한 실시간 모니터링 | |
| JP7443430B2 (ja) | リアルタイムの力および膜応力制御を備えた基板支持体 | |
| US4931135A (en) | Etching method and etching apparatus | |
| US7869184B2 (en) | Method of determining a target mesa configuration of an electrostatic chuck | |
| US7582491B2 (en) | Method for diagnosing electrostatic chuck, vacuum processing apparatus, and storage medium | |
| US8383000B2 (en) | Substrate processing apparatus, method for measuring distance between electrodes, and storage medium storing program | |
| TWI816890B (zh) | 電漿處理裝置及環構件之厚度測定方法 | |
| CN114975065A (zh) | 用于处理基板的装置和方法 | |
| JP2010010231A (ja) | プラズマ処理装置 | |
| KR20260001417A (ko) | 반도체 웨이퍼 처리 장치 | |
| TW202314778A (zh) | 用於決定環在處理套件內的位置的方法和裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230526 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230904 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7362293 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |