JP2019209457A - 動作計画装置及び動作計画方法 - Google Patents
動作計画装置及び動作計画方法 Download PDFInfo
- Publication number
- JP2019209457A JP2019209457A JP2018110248A JP2018110248A JP2019209457A JP 2019209457 A JP2019209457 A JP 2019209457A JP 2018110248 A JP2018110248 A JP 2018110248A JP 2018110248 A JP2018110248 A JP 2018110248A JP 2019209457 A JP2019209457 A JP 2019209457A
- Authority
- JP
- Japan
- Prior art keywords
- path
- smoothing
- point
- time
- maximum allowable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1661—Program controls characterised by programming, planning systems for manipulators characterised by task planning, object-oriented languages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract
Description
好ましくは、前記仮時間調整部は、前記第1の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化した結果、前記空間平滑化経路が前記障害物と干渉していた場合、前記主要点を含み前記第1の平滑化範囲よりも狭い範囲である第2の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化する。以上の構成によれば、前記空間平滑化経路と前記障害物との干渉を解消することができる。
好ましくは、前記仮時間調整部は、前記第2の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化した結果、前記第2の平滑化範囲において前記動作速度が最大許容加速度を越えていたら、前記第2の平滑化範囲において前記動作速度が前記最大許容加速度を越えないように前記主要点以降の前記複数の主要点の前記仮時間を再び引き延ばす。以上の構成によれば、簡単な演算で、かつ、確実に、障害物と干渉することがなく、最大許容速度や最大許容加速度に関する条件を満足したロボットの動作計画が実現される。
好ましくは、前記中間点は、前記空間平滑化経路上の通過点のうち、前記空間平滑化経路の距離に対する傾きが前記通過点の前後で所定量以上変化した通過点である。
好ましくは、前記ロボットは複数の関節を有する多関節ロボットであり、前記複数の関節間で前記仮時間は同期している。
本願発明の第2の観点によれば、ロボットの動作計画方法であって、予め設定された始点と終点との間で前記ロボットが障害物と干渉しない非干渉経路を生成する非干渉経路生成ステップと、前記非干渉経路を空間的に平滑化した空間平滑化経路を生成する空間平滑化経路生成ステップと、前記空間平滑化経路に含まれる複数の主要点を通過する時間を決定することで、時空間における経路としての時空間経路を生成する時間決定ステップと、を備え、前記複数の主要点は、前記空間平滑化経路の始点と、前記空間平滑化経路の終点と、前記空間平滑化経路の始点と前記空間平滑化経路の終点の間における中間点と、を含み、前記時間決定ステップは、前記複数の主要点間で動作速度が最大許容速度を越えないように、各主要点毎に、前記始点から各主要点に至るまでに経過する時間である仮時間を設定する仮時間設定ステップと、前記主要点を含む第1の平滑化範囲において前記空間平滑化経路を軟化関数を用いて空間的に平滑化し、前記第1の平滑化範囲において前記動作速度が最大許容加速度を越えていたら、前記第1の平滑化範囲において前記動作速度が前記最大許容加速度を越えないように前記主要点以降の前記複数の主要点の前記仮時間を引き延ばす仮時間調整ステップと、を有する、動作計画方法が提供される。以上の方法によれば、簡単な演算で、障害物と干渉することがなく、最大許容速度や最大許容加速度に関する条件を満足したロボットの動作計画が実現される。

関節ベクトル2=(関節1角度2、関節2角度2、・・・、関節M角度2)
関節ベクトル3=(関節1角度3、関節2角度3、・・・、関節M角度3)
・・・
関節ベクトル8=(関節1角度8、関節2角度8、・・・、関節M角度8)
ここで、「関節a角度b」は、距離軸上でb番目の関節ベクトルにおけるa番目の関節の角度を意味している。
関節ベクトル1=(関節1角度1、関節2角度1、・・・、関節M角度1)
関節速度ベクトル1=(関節1角速度1、関節2角速度1、・・・、関節M角速度1)
関節ベクトル8=(関節1角度8、関節2角度8、・・・、関節M角度8)
関節速度ベクトル8=(関節1角速度8、関節2角速度8、・・・、関節M角速度8)
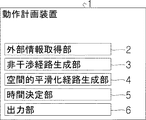
2 外部情報取得部
3 非干渉経路生成部
4 空間的平滑化経路生成部
5 時間決定部
6 出力部
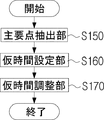
7 主要点抽出部
8 仮時間設定部
9 仮時間調整部
Claims (6)
- ロボットの動作計画装置であって、
予め設定された始点と終点との間で前記ロボットが障害物と干渉しない非干渉経路を生成する非干渉経路生成部と、
前記非干渉経路を空間的に平滑化した空間平滑化経路を生成する空間平滑化経路生成部と、
前記空間平滑化経路に含まれる複数の主要点を通過する時間を決定することで、時空間における経路としての時空間経路を生成する時間決定部と、
を備え、
前記複数の主要点は、前記空間平滑化経路の始点と、前記空間平滑化経路の終点と、前記空間平滑化経路の始点と前記空間平滑化経路の終点の間における中間点と、を含み、
前記時間決定部は、
前記複数の主要点間で動作速度が最大許容速度を越えないように、各主要点毎に、前記始点から各主要点に至るまでに経過する時間である仮時間を設定する仮時間設定部と、
前記主要点を含む第1の平滑化範囲において前記空間平滑化経路を軟化関数を用いて空間的に平滑化し、前記第1の平滑化範囲において前記動作速度が最大許容加速度を越えていたら、前記第1の平滑化範囲において前記動作速度が前記最大許容加速度を越えないように前記主要点以降の前記複数の主要点の前記仮時間を引き延ばす仮時間調整部と、
を有する、
動作計画装置。 - 請求項1に記載の動作計画装置であって、
前記仮時間調整部は、前記第1の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化した結果、前記空間平滑化経路が前記障害物と干渉していた場合、前記主要点を含み前記第1の平滑化範囲よりも狭い範囲である第2の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化する、
動作計画装置。 - 請求項2に記載の動作計画装置であって、
前記仮時間調整部は、前記第2の平滑化範囲において前記空間平滑化経路を前記軟化関数を用いて空間的に平滑化した結果、前記第2の平滑化範囲において前記動作速度が最大許容加速度を越えていたら、前記第2の平滑化範囲において前記動作速度が前記最大許容加速度を越えないように前記主要点以降の前記複数の主要点の前記仮時間を再び引き延ばす、
動作計画装置。 - 請求項1から3までの何れか1項に記載の動作計画装置であって、
前記中間点は、前記空間平滑化経路上の通過点のうち、前記空間平滑化経路の距離に対する傾きが前記通過点の前後で所定量以上変化した通過点である、
動作計画装置。 - 請求項1から4までの何れか1項に記載の動作計画装置であって、
前記ロボットは複数の関節を有する多関節ロボットであり、
前記複数の関節間で前記仮時間は同期している、
動作計画装置。 - ロボットの動作計画方法であって、
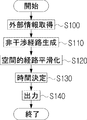
予め設定された始点と終点との間で前記ロボットが障害物と干渉しない非干渉経路を生成する非干渉経路生成ステップと、
前記非干渉経路を空間的に平滑化した空間平滑化経路を生成する空間平滑化経路生成ステップと、
前記空間平滑化経路に含まれる複数の主要点を通過する時間を決定することで、時空間における経路としての時空間経路を生成する時間決定ステップと、
を備え、
前記複数の主要点は、前記空間平滑化経路の始点と、前記空間平滑化経路の終点と、前記空間平滑化経路の始点と前記空間平滑化経路の終点の間における中間点と、を含み、
前記時間決定ステップは、
前記複数の主要点間で動作速度が最大許容速度を越えないように、各主要点毎に、前記始点から各主要点に至るまでに経過する時間である仮時間を設定する仮時間設定ステップと、
前記主要点を含む第1の平滑化範囲において前記空間平滑化経路を軟化関数を用いて空間的に平滑化し、前記第1の平滑化範囲において前記動作速度が最大許容加速度を越えていたら、前記第1の平滑化範囲において前記動作速度が前記最大許容加速度を越えないように前記主要点以降の前記複数の主要点の前記仮時間を引き延ばす仮時間調整ステップと、
を有する、
動作計画方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018110248A JP7067289B2 (ja) | 2018-06-08 | 2018-06-08 | 動作計画装置及び動作計画方法 |
| CN201910433164.6A CN110576437B (zh) | 2018-06-08 | 2019-05-23 | 动作计划装置及动作计划方法 |
| US16/433,299 US11167418B2 (en) | 2018-06-08 | 2019-06-06 | Operation planning apparatus and operation planning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018110248A JP7067289B2 (ja) | 2018-06-08 | 2018-06-08 | 動作計画装置及び動作計画方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019209457A true JP2019209457A (ja) | 2019-12-12 |
| JP7067289B2 JP7067289B2 (ja) | 2022-05-16 |
Family
ID=68763972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018110248A Active JP7067289B2 (ja) | 2018-06-08 | 2018-06-08 | 動作計画装置及び動作計画方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11167418B2 (ja) |
| JP (1) | JP7067289B2 (ja) |
| CN (1) | CN110576437B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114589695A (zh) * | 2022-03-08 | 2022-06-07 | 苏州艾利特机器人有限公司 | 一种机器人运动轨迹的转接方法、装置及存储介质 |
| WO2023032288A1 (ja) * | 2021-08-31 | 2023-03-09 | TechMagic株式会社 | ロボット装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7028196B2 (ja) * | 2019-01-15 | 2022-03-02 | オムロン株式会社 | ロボット制御装置、ロボット制御方法、及びロボット制御プログラム |
| CN114310921B (zh) * | 2022-03-16 | 2022-06-10 | 珞石(北京)科技有限公司 | 一种最小曲率的直线过渡路径生成方法 |
| CN115488898A (zh) * | 2022-10-31 | 2022-12-20 | 上海节卡机器人科技有限公司 | 轨迹规划方法、装置、机器人及计算机可读取存储介质 |
| CN116197917B (zh) * | 2023-04-28 | 2023-08-01 | 苏州艾利特机器人有限公司 | 自适应最大加速度计算方法、装置、存储介质及电子设备 |
| CN116922398B (zh) * | 2023-09-15 | 2023-12-22 | 华侨大学 | 一种绳索机器人及其路径规划方法和装置 |
| CN119635620B (zh) * | 2024-10-28 | 2025-10-24 | 深圳市朗宇芯科技有限公司 | 基于机械手控制系统实现精准定位与快速平滑运行的方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6228810A (ja) * | 1985-07-31 | 1987-02-06 | Matsushita Electric Ind Co Ltd | ロボツトの制御装置 |
| JP2005309990A (ja) * | 2004-04-23 | 2005-11-04 | Toyota Motor Corp | 経路設定方法 |
| JP2009053926A (ja) * | 2007-08-27 | 2009-03-12 | Toyota Motor Corp | 経路計画装置及び経路計画方法 |
| JP2014161917A (ja) * | 2013-02-21 | 2014-09-08 | Seiko Epson Corp | ロボット制御システム、ロボット、ロボット制御方法及びプログラム |
| JP2018069428A (ja) * | 2016-11-04 | 2018-05-10 | トヨタ自動車株式会社 | 動作経路計画方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7979158B2 (en) * | 2007-07-31 | 2011-07-12 | Rockwell Automation Technologies, Inc. | Blending algorithm for trajectory planning |
| US9821458B1 (en) * | 2016-05-10 | 2017-11-21 | X Development Llc | Trajectory planning with droppable objects |
| US10580682B2 (en) * | 2017-02-15 | 2020-03-03 | Persimmon Technologies, Corp. | Material-handling robot with multiple end-effectors |
| CN107030697B (zh) * | 2017-04-28 | 2019-05-28 | 广州大学 | 一种机器人笛卡尔空间平滑轨迹的规划方法 |
-
2018
- 2018-06-08 JP JP2018110248A patent/JP7067289B2/ja active Active
-
2019
- 2019-05-23 CN CN201910433164.6A patent/CN110576437B/zh not_active Expired - Fee Related
- 2019-06-06 US US16/433,299 patent/US11167418B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6228810A (ja) * | 1985-07-31 | 1987-02-06 | Matsushita Electric Ind Co Ltd | ロボツトの制御装置 |
| JP2005309990A (ja) * | 2004-04-23 | 2005-11-04 | Toyota Motor Corp | 経路設定方法 |
| JP2009053926A (ja) * | 2007-08-27 | 2009-03-12 | Toyota Motor Corp | 経路計画装置及び経路計画方法 |
| JP2014161917A (ja) * | 2013-02-21 | 2014-09-08 | Seiko Epson Corp | ロボット制御システム、ロボット、ロボット制御方法及びプログラム |
| JP2018069428A (ja) * | 2016-11-04 | 2018-05-10 | トヨタ自動車株式会社 | 動作経路計画方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023032288A1 (ja) * | 2021-08-31 | 2023-03-09 | TechMagic株式会社 | ロボット装置 |
| JP2023034620A (ja) * | 2021-08-31 | 2023-03-13 | TechMagic株式会社 | ロボット装置 |
| JP7542262B2 (ja) | 2021-08-31 | 2024-08-30 | TechMagic株式会社 | ロボット装置 |
| CN114589695A (zh) * | 2022-03-08 | 2022-06-07 | 苏州艾利特机器人有限公司 | 一种机器人运动轨迹的转接方法、装置及存储介质 |
| CN114589695B (zh) * | 2022-03-08 | 2023-09-22 | 苏州艾利特机器人有限公司 | 一种机器人运动轨迹的转接方法、装置及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11167418B2 (en) | 2021-11-09 |
| CN110576437A (zh) | 2019-12-17 |
| CN110576437B (zh) | 2023-03-24 |
| US20190375100A1 (en) | 2019-12-12 |
| JP7067289B2 (ja) | 2022-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019209457A (ja) | 動作計画装置及び動作計画方法 | |
| Yao et al. | Crowd-aware robot navigation for pedestrians with multiple collision avoidance strategies via map-based deep reinforcement learning | |
| JP6717164B2 (ja) | 動作経路計画方法 | |
| Shin et al. | Path generation for robot vehicles using composite clothoid segments | |
| TWI829561B (zh) | 機械臂動態環境路徑規劃之方法與系統 | |
| KR101196374B1 (ko) | 이동 로봇의 경로 생성 시스템 | |
| US9862095B2 (en) | Control device for mobile robot | |
| US20100174435A1 (en) | Path planning apparatus of robot and method thereof | |
| KR20120073616A (ko) | 로봇의 경로 계획 장치 및 그 방법 | |
| JP7258046B2 (ja) | 経路決定装置、ロボット及び経路決定方法 | |
| JP2003241836A (ja) | 自走移動体の制御方法および装置 | |
| JP2009211571A (ja) | 軌道計画装置及び軌道計画方法、並びにコンピュータ・プログラム | |
| KR102330754B1 (ko) | 궤도 생성 장치 및 궤도 생성 방법 | |
| Liang et al. | Adaptiveon: Adaptive outdoor local navigation method for stable and reliable actions | |
| US8055383B2 (en) | Path planning device | |
| JP2014161918A (ja) | ロボット制御システム、ロボット、ロボット制御方法及びプログラム | |
| JP4667764B2 (ja) | 経路設定方法 | |
| JP2014161917A (ja) | ロボット制御システム、ロボット、ロボット制御方法及びプログラム | |
| JPWO2020161910A1 (ja) | 制御装置、制御方法、プログラム | |
| JP2008105132A (ja) | アームの関節空間における経路を生成する方法と装置 | |
| Gaskett et al. | Reinforcement learning for visual servoing of a mobile robot | |
| Yang et al. | State estimation for legged robots using contact-centric leg odometry | |
| Urcola et al. | Cooperative robot team navigation strategies based on an environment model | |
| JP5107533B2 (ja) | 移動ロボット | |
| JP2007257200A (ja) | 移動体及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220411 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7067289 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |