JP2019220099A - ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム - Google Patents
ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム Download PDFInfo
- Publication number
- JP2019220099A JP2019220099A JP2018119162A JP2018119162A JP2019220099A JP 2019220099 A JP2019220099 A JP 2019220099A JP 2018119162 A JP2018119162 A JP 2018119162A JP 2018119162 A JP2018119162 A JP 2018119162A JP 2019220099 A JP2019220099 A JP 2019220099A
- Authority
- JP
- Japan
- Prior art keywords
- image
- reference image
- depth value
- stereo matching
- search range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Studio Devices (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
三次元復元手法には、例えば、ステレオカメラによる手法がある。ステレオカメラおいては、一定の間隔に並べられたキャリブレーション済みの複数のカメラの各々により画像を撮像し、撮像した画像の各々を用いてステレオマッチングを行うことにより、三角測量の原理に基づいて画像における各画素の奥行値を計算する。そして、計算した奥行値に基づいて三次元の位置情報を持つ点群に変換することで、三次元形状モデルを作成する。
まず、第1の実施形態について説明する。
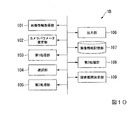
図1は、第1の実施形態に係るステレオマッチング処理装置1の構成例を示すブロック図である。ステレオマッチング処理装置1は、例えば、画像情報取得部101、カメラパラメータ推定部102、第1処理部103、選択部104、第2処理部105、出力部106及び画像情報記憶部107を備える。
カメラパラメータ推定部102は、多視点画像の画像情報を用いて、カメラパラメータを推定する。カメラパラメータ推定部102は、例えば、画像から特徴量を抽出して対応点の計算を行うStructure from Motion(SfM)に、多視点画像の画像情報を入力することにより、カメラパラメータの推定値を取得する。カメラパラメータ推定部102は、推定したカメラパラメータを画像情報記憶部107に記憶させる。
図2は、第1の実施形態に係る第1処理部103が行う処理を説明する図である。図2では、視点C1から撮像領域E1が撮像され、視点C2から撮像領域E2が撮像される様子を俯瞰した模式図を示している。
この例では、視点C1から撮像領域E1が撮像された画像を第1参照画像とし、視点C2から撮像領域E2が撮像された画像を第1近傍画像とする。
また、この例では、各視点において共通する座標系として、XYZ座標系を示している。このXYZ座標系においては、第1参照画像の画像面上の任意の方向をX軸、X軸に垂直な方向をY軸として示し、第1参照画像の画像面に対する奥行方向をZ軸として示している。つまり、この場合、第1処理部103が算出する奥行値の方向は、Z軸向である。
また、この例では、第1参照画像における任意の画素pについて、第1処理部103により奥行値zpが算出され、この画素pに対応する三次元点Pの位置座標が(Xp、Yp、Zp)であることを示している。また、多視点画像のうち、第1参照画像及び第1近傍画像とは異なる画像の視点C3及びC4を模式的に示している。
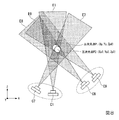
図3及び図4では、第1参照画像の視点C1(Xc1、Yc1、Zc1)、第2近傍画像の視点C7(Xc7、Yc7、Zc7)、及び多視点画像のうち、第1参照画像及び第2近傍画像とは異なる画像の視点C5及びC6を示している。また、第1参照画像における画素について第1処理部103により算出された奥行値に対応する三次元点P(Xp、Yp、Zp)を示している。
この例で所定の角度範囲が視差角γ6とγ7とを含み、視差角γ5を含まない範囲に設定された場合、視差角γ7に対応する視点C7から撮像された画像、及び視差角γ6に対応する視点C6から撮像された画像が、第2近傍画像として選択される。このように、選択部104は、複数の画像を第2近傍画像として選択してよい。
画像情報記憶部107は、多視点画像の画像情報及びそのカメラパラメータを記憶する。
画像情報取得部101は、多視点画像の画像情報を取得する。画像情報取得部101は、取得した画像情報を画像情報記憶部107に記憶させる。
ステップS2:
カメラパラメータ推定部102は、多視点画像の画像情報に基づいて、カメラパラメータを推定する。カメラパラメータ推定部102は、推定したカメラパラメータを、画像情報に対応付けて画像情報記憶部107に記憶させる。
第1処理部103は、多視点画像から任意の第1参照画像を選択する。
ステップS4:
第1処理部103は、多視点画像から第1近傍画像を選択する。第1処理部103は、例えば、多視点画像のうち第1参照画像の視点に近い視点を有する画像を、第1近傍画像として選択する。
ステップS5:
第1処理部103は、第1参照画像及び第1近傍画像を用いてステレオマッチングを行うことにより、第1参照画像における画素ごとの奥行値を算出する。第1処理部103は算出した奥行値(第1奥行値)を選択部104に出力する。
ステップS6:
選択部104は、第1処理部103により算出された奥行値に対応する三次元点に基づいて、第2近傍画像を選択する。選択部104は、例えば、三次元点に対する視差角が所定の視差角の範囲内であり、尚且つ、視点から三次元点までの距離が、第1参照画像の視点C1から三次元点までの距離L1に対して所定の距離比の範囲内である画像を第2近傍画像として選択する。
ステップS7:
第2処理部105は、第1参照画像及び、選択部104により選択された第2近傍画像を用いてステレオマッチングを行うことにより、第1参照画像における画素ごとの奥行値(第2奥行値)を算出する。
ステップS8:
出力部106は、第2処理部105により奥行値が算出された画素を対応する三次元点の位置座標に変換する。
ステップS9:
ステレオマッチング処理装置1は、ステレオマッチングを終了させるか否かを判定する。ステレオマッチング処理装置1は、例えば、所定の終了条件を充足した場合、ステレオマッチングを終了させると判定する。所定の終了条件とは、例えば、全ての多視点画像において奥行値が算出された場合である。ステレオマッチング処理装置1は、ステレオマッチングを終了させないと判定した場合、ステップS3に示す処理に戻り、再び、多視点画像から第1参照画像を選択する処理を行う。
次に、第2の実施形態について説明する。以下の説明においては、上述した実施形態と異なる部分についてのみ説明し、同じ部分については同等の符号を付してその説明を省略する。
この例では、視点C1から撮像領域E1が撮像された画像を第1参照画像とし、視点C7から撮像領域E7が撮像された画像を第2近傍画像とし、視点C8から撮像領域E8が撮像された画像を第2参照画像とし、視点C9から撮像領域E9が撮像された画像を第3近傍画像とする。
また、この例では、第2処理部105により第1参照画像における任意の画素の奥行値に対応する三次元点P(Xp、Yp、Zp#)を示している。また、第3処理部108により第2参照画像における任意の画素の奥行値に対応する三次元点P2(Xp2、Yp2、Zp2)を示している。
出力部106は、例えば、三次元点Pと三次元点P2とにおけるXY平面上の距離が、所定の距離未満にある場合に、三次元点Pと三次元点P2とを合成する。
出力部106は、三次元点の各座標値について単純加算平均することにより合成して一つの三次元点を生成する。この場合、三次元点P(Xp、Yp、Zp#)と三次元点P2(Xp2、Yp2、Zp2)とを合成した三次元点の位置座標は((Xp+Xp2)/2、(Yp+Yp2)/2、(Zp#+Zp2)/2)となる。或いは、出力部106は、三次元点の各座標値について重みづけを行った上で加算平均することにより合成して一つの三次元点の位置座標を生成するようにしてもよい。
第3処理部108は、第1処理部103により算出された奥行値(第1奥行値)に基づいて、第2参照画像を選択する。
ステップS109:
第3処理部108は、多視点画像から第2参照画像とは異なる第3近傍画像を選択する。第3処理部108は、例えば、第2参照画像の視点と近い位置に視点を有する画像を第3近傍画像として選択する。
ステップS110:
第3処理部108は、第2参照画像及び第3近傍画像を用いてステレオマッチングを行うことにより、第2参照画像における画素ごとの奥行値(第3奥行値)を算出する。
ステップS111:
出力部106は、複数の三次元点を合成する。出力部106は、第2処理部105により奥行値が算出された画素を、対応する三次元点の位置座標に変換する。出力部106は、第3処理部108により奥行値が算出された画素を、対応する三次元点の位置座標に変換する。そして、第3処理部108は、これらの三次元点を合成して一つの三次元点を生成する。
次に、第3の実施形態について説明する。以下の説明においては、上述した実施形態と異なる部分についてのみ説明し、同じ部分については同等の符号を付してその説明を省略する。
次に、第3の実施形態の変形例1について説明する。本変形例では、探索範囲決定部109が第1参照画像の画素の探索範囲に基づいて、第1参照画像の探索範囲を限定する。
本変形例の探索範囲決定部109が行う処理について、図12及び図13を用いて説明する。図12は、第3の実施形態の変形例1に係る探索範囲決定部109が行う処理を説明する図である。図12では、視点C1から撮像領域E1が撮像され、視点C2から撮像領域E2が撮像される様子を俯瞰した模式図を示している。
この例では、視点C1から撮像領域E1が撮像された画像を第1参照画像とし、視点C2から撮像領域E2が撮像された画像を第1近傍画像とする。
この場合、図13に示すように、例えば、探索範囲決定部109は、第1参照画像を縦及び横に四分割する直線の交点に対応する画素p10〜p18の各々について、奥行値の最大値Dmaxや最小値Dminをそれぞれ抽出する。例えば、探索範囲決定部109は、抽出した複数の奥行値の平均値、最大値及び最小値に基づいて、画素ごとの探索範囲を決定する。例えば、探索範囲決定部109は、探索範囲の上限を((平均値)+(最大値−最小値)×変数)とし、探索範囲の下限を((平均値)−(最大値−最小値)×変数)とする。ここでの変数は0.5以下の任意の正の実数である。これにより、最小値から最大値までの範囲が広すぎて、全ての範囲で奥行値を算出しようとした場合に、奥行値が精度よく算出できないことがあり得る場合であっても、範囲を狭めることにより奥行値を精度よく算出することが可能となる。
次に、第3の実施形態の変形例2について説明する。本変形例では、探索範囲決定部109が予め定められた探索範囲の上限に基づいて、探索範囲を限定する。
本変形例の探索範囲決定部109が行う処理について、図14を用いて説明する。図14は、第3の実施形態の変形例2に係る探索範囲決定部109が行う処理を説明する図である。図14では、図12同様に、視点C1から撮像領域E1が撮像され、視点C2から撮像領域E2が撮像される様子を俯瞰した模式図を示している。また、視点C1から撮像領域E1が撮像された画像を第1参照画像とし、視点C2から撮像領域E2が撮像された画像を第1近傍画像とする。
これにより、第3の実施形態の変形例2に係るステレオマッチング処理装置1Bでは、第1参照画像における光学中心に対応する視線ベクトルV1と、第1近傍画像における光学中心に対応する視線ベクトルV2とがほぼ平行となる位置関係である場合、撮像領域E1とE2の共通領域における奥行方向の最大値が無限大となる場合であっても、上限値Dmaxthを上限とすることができる。なお、ここでの上限値Dmaxthは、ステレオマッチング処理装置1(1A、1B)の計算処理の処理能力等に応じて、任意に決定されてよい。
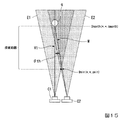
次に、第3の実施形態の変形例3について説明する。本変形例では、探索範囲決定部109が視差角に基づいて探索範囲を限定する。
本変形例の探索範囲決定部109が行う処理について、図15を用いて説明する。図15は、第3の実施形態の変形例3に係る探索範囲決定部109が行う処理を説明する図である。図15では、図14同様に、視点C1から撮像領域E1が撮像され、視点C2から撮像領域E2が撮像される様子を俯瞰した模式図を示している。また、この例では、視点C1から撮像領域E1が撮像された画像を第1参照画像とし、視点C2から撮像領域E2が撮像された画像を第1近傍画像とする。
次に、第3の実施形態の変形例4について説明する。本変形例では、探索範囲決定部109がSfMの結果に基づいて探索範囲を限定する。
次に、第3の実施形態の変形例5について説明する。本変形例では、探索範囲決定部109が探索範囲を更新させる。
101…画像情報取得部
102…カメラパラメータ推定部
103…第1処理部
104…選択部
105…第2処理部
106…出力部
107…画像情報記憶部
108…第3処理部
109…探索範囲決定部
Claims (16)
- 対象物体が互いに異なる撮像位置から撮像された複数の画像を用いて前記対象物体の奥行値を算出するステレオマッチング処理装置であって、
前記複数の画像における第1参照画像と前記第1参照画像とは異なる第1近傍画像とのステレオマッチングを行うことにより、前記第1参照画像における画素ごとの奥行値である第1奥行値を算出する第1処理部と、
前記第1奥行値に基づいて、前記複数の画像における前記第1参照画像とは異なる第2近傍画像を選択する選択部と、
前記第1参照画像と前記第2近傍画像とのステレオマッチングを行うことにより前記第1参照画像における画素ごとの奥行値である第2奥行値を算出する第2処理部
を備えることを特徴とするステレオマッチング処理装置。 - 前記第1参照画像及び前記第1近傍画像の各々のカメラパラメータにおける撮像位置及び撮像方向に基づいて、前記第1奥行値の探索を行う探索範囲を決定する探索範囲決定部
を更に備え、
前記第1処理部は、前記探索範囲決定部により決定された前記探索範囲の範囲で第1奥行値を算出する
ことを特徴とする請求項1に記載のステレオマッチング処理装置。 - 前記探索範囲決定部は、前記第1参照画像の撮像領域と前記第1近傍画像の撮像領域とが共通する範囲に基づいて、前記探索範囲を決定する
ことを特徴とする請求項2に記載のステレオマッチング処理装置。 - 前記探索範囲決定部は、前記第1参照画像の撮像位置及び前記第1参照画像における任意の画素を通る視線ベクトルが、前記第1近傍画像の撮像領域と交差する領域に基づいて、前記探索範囲を決定する
ことを特徴とする請求項2に記載のステレオマッチング処理装置。 - 前記探索範囲決定部は、SfM(Structure from Motion)に、前記複数の画像を入力することにより得られる三次元点群に対応する前記第1参照画像の画素の奥行値に基づいて、前記探索範囲を決定する
ことを特徴とする請求項2に記載のステレオマッチング処理装置。 - 前記探索範囲決定部は、前記第1参照画像の撮像領域の一部を前記探索範囲とした場合において、前記第1処理部により算出された前記第1奥行値に基づいて決定される他の探索範囲が、前記探索範囲よりも狭い範囲である場合、前記他の探索範囲を前記探索範囲として更新する
ことを特徴とする請求項2に記載のステレオマッチング処理装置。 - 前記探索範囲決定部は、前記第1参照画像の撮像位置、及び前記第1参照画像の撮像領域において奥行値が所定の上限値となる奥行上限点を通る視線ベクトルと、前記第1近傍画像の撮像位置及び前記第1近傍画像の撮像領域において前記奥行上限点に対応する位置を通る視線ベクトルとの間の視差角が、所定の視差角閾値未満である場合、前記探索範囲を範囲なしとする
ことを特徴とする請求項2に記載のステレオマッチング処理装置。 - 前記選択部は、前記第1奥行値に対応する三次元点及び前記複数の画像の各々の撮像位置を通るベクトル群のうち、前記第1参照画像の撮像位置を通るベクトルとの間の角度が、所定の範囲内であるベクトルに対応する撮像位置で撮像された画像を、前記第2近傍画像として選択する
請求項1から請求項7の何れか一項に記載のステレオマッチング処理装置。 - 前記選択部は、前記第1奥行値に対応する三次元点から前記第1参照画像の撮像位置までの距離、及び前記三次元点から前記複数の画像の各々の撮像位置までの距離に基づいて、前記第2近傍画像を選択する
請求項1から請求項8の何れか一項に記載のステレオマッチング処理装置。 - 前記選択部は、第1参照画像における画素ごとに、前記第2近傍画像を選択する
請求項1から請求項9の何れか一項に記載のステレオマッチング処理装置。 - 前記選択部は、第1参照画像ごとに、前記第2近傍画像を選択する
請求項1から請求項9の何れか一項に記載のステレオマッチング処理装置。 - 前記選択部は、前記第1参照画像における所定の代表画素、及び所定の代表奥行値に基づいて、前記第2近傍画像を選択する
請求項11に記載のステレオマッチング処理装置。 - 前記選択部は、前記代表画素を前記第1参照画像における光学中心に対応する画素とし、前記代表奥行値を前記第1参照画像において算出された複数の前記第1奥行値の中央値として、前記第2近傍画像を選択する
請求項12に記載のステレオマッチング処理装置。 - 前記複数の画像のうち前記第1参照画像とは異なる第2参照画像、及び前記複数の画像に含まれる前記第2参照画像とは異なる第3近傍画像を用いてステレオマッチングを行うことにより、第2参照画像における画素ごとの奥行値である第3奥行値を算出する第3処理部
を更に備えることを特徴とする請求項1から請求項13の何れか一項に記載のステレオマッチング処理装置。 - 対象物体が互いに異なる撮像位置から撮像された複数の画像を用いて前記対象物体の奥行値を算出するステレオマッチング処理方法であって、
第1処理部が、前記複数の画像における第1参照画像と前記第1参照画像とは異なる第1近傍画像とのステレオマッチングを行うことにより、前記第1参照画像における画素ごとの奥行値である第1奥行値を算出する第1処理工程と、
選択部が、前記第1奥行値に基づいて、前記複数の画像における前記第1参照画像とは異なる第2近傍画像を選択する選択工程と、
第2処理部が、前記第1参照画像と前記第2近傍画像とのステレオマッチングを行うことにより前記第1参照画像における画素ごとの奥行値である第2奥行値を算出する第2処理工程
を含むことを特徴とするステレオマッチング処理方法。 - 対象物体が互いに異なる撮像位置から撮像された複数の画像を用いて前記対象物体の奥行値を算出するステレオマッチング処理装置としてコンピュータを動作させるプログラムであって、
前記コンピュータを、
前記複数の画像における第1参照画像と前記第1参照画像とは異なる第1近傍画像とのステレオマッチングを行うことにより、前記第1参照画像における画素ごとの奥行値である第1奥行値を算出する第1処理手段と、
前記第1奥行値に基づいて、前記複数の画像における前記第1参照画像とは異なる第2近傍画像を選択する選択手段と、
前記第1参照画像と前記第2近傍画像とのステレオマッチングを行うことにより前記第1参照画像における画素ごとの奥行値である第2奥行値を算出する第2処理手段
として動作させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018119162A JP2019220099A (ja) | 2018-06-22 | 2018-06-22 | ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018119162A JP2019220099A (ja) | 2018-06-22 | 2018-06-22 | ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019220099A true JP2019220099A (ja) | 2019-12-26 |
Family
ID=69096695
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018119162A Pending JP2019220099A (ja) | 2018-06-22 | 2018-06-22 | ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019220099A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023019521A (ja) * | 2021-07-29 | 2023-02-09 | 株式会社東芝 | 学習方法、プログラム及び画像処理装置 |
| WO2023095375A1 (ja) * | 2021-11-29 | 2023-06-01 | パナソニックIpマネジメント株式会社 | 三次元モデル生成方法及び三次元モデル生成装置 |
| CN117456114A (zh) * | 2023-12-26 | 2024-01-26 | 北京智汇云舟科技有限公司 | 基于多视图的三维图像重建方法及系统 |
| CN117576180A (zh) * | 2024-01-15 | 2024-02-20 | 常熟理工学院 | 基于自适应多尺度窗口的多视图深度估计方法及应用 |
| JP7518040B2 (ja) | 2021-06-17 | 2024-07-17 | Kddi株式会社 | 三次元モデル復元装置、方法及びプログラム |
| CN118864350A (zh) * | 2024-06-07 | 2024-10-29 | 无锡学院 | 一种应用于输电线路检修的螺栓定位算法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014141522A1 (ja) * | 2013-03-12 | 2014-09-18 | 富士フイルム株式会社 | 画像判定装置、撮像装置、3次元計測装置、画像判定方法、及びプログラム |
| JP2016524125A (ja) * | 2013-03-15 | 2016-08-12 | ペリカン イメージング コーポレイション | カメラアレイを用いた立体撮像のためのシステムおよび方法 |
| JP2016217944A (ja) * | 2015-05-22 | 2016-12-22 | シャープ株式会社 | 計測装置、および計測方法 |
| JP2017054481A (ja) * | 2015-07-02 | 2017-03-16 | 株式会社リコー | 視差画像生成装置、視差画像生成方法及び視差画像生成プログラム、物体認識装置、機器制御システム |
| US20170154219A1 (en) * | 2014-06-17 | 2017-06-01 | Yujin Robot Co., Ltd. | Apparatus of recognizing position of mobile robot using direct tracking and method thereof |
| JP2018057532A (ja) * | 2016-10-04 | 2018-04-12 | 凸版印刷株式会社 | 補装具装着部形状取得方法及び補装具装着部形状取得システム |
-
2018
- 2018-06-22 JP JP2018119162A patent/JP2019220099A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014141522A1 (ja) * | 2013-03-12 | 2014-09-18 | 富士フイルム株式会社 | 画像判定装置、撮像装置、3次元計測装置、画像判定方法、及びプログラム |
| JP2016524125A (ja) * | 2013-03-15 | 2016-08-12 | ペリカン イメージング コーポレイション | カメラアレイを用いた立体撮像のためのシステムおよび方法 |
| US20170154219A1 (en) * | 2014-06-17 | 2017-06-01 | Yujin Robot Co., Ltd. | Apparatus of recognizing position of mobile robot using direct tracking and method thereof |
| JP2016217944A (ja) * | 2015-05-22 | 2016-12-22 | シャープ株式会社 | 計測装置、および計測方法 |
| JP2017054481A (ja) * | 2015-07-02 | 2017-03-16 | 株式会社リコー | 視差画像生成装置、視差画像生成方法及び視差画像生成プログラム、物体認識装置、機器制御システム |
| JP2018057532A (ja) * | 2016-10-04 | 2018-04-12 | 凸版印刷株式会社 | 補装具装着部形状取得方法及び補装具装着部形状取得システム |
Non-Patent Citations (1)
| Title |
|---|
| 吉田 武史 ほか: "Epipolar Transferを利用した対応点探索と回転型ステレオカメラによる密な三次元再構成", 日本ロボット学会誌, vol. 第31巻 第10号(通巻238号), JPN6022016123, 15 December 2013 (2013-12-15), JP, pages 75 - 83, ISSN: 0004759671 * |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7518040B2 (ja) | 2021-06-17 | 2024-07-17 | Kddi株式会社 | 三次元モデル復元装置、方法及びプログラム |
| JP2023019521A (ja) * | 2021-07-29 | 2023-02-09 | 株式会社東芝 | 学習方法、プログラム及び画像処理装置 |
| JP7451465B2 (ja) | 2021-07-29 | 2024-03-18 | 株式会社東芝 | 学習方法、プログラム及び画像処理装置 |
| WO2023095375A1 (ja) * | 2021-11-29 | 2023-06-01 | パナソニックIpマネジメント株式会社 | 三次元モデル生成方法及び三次元モデル生成装置 |
| CN117456114A (zh) * | 2023-12-26 | 2024-01-26 | 北京智汇云舟科技有限公司 | 基于多视图的三维图像重建方法及系统 |
| CN117456114B (zh) * | 2023-12-26 | 2024-04-30 | 北京智汇云舟科技有限公司 | 基于多视图的三维图像重建方法及系统 |
| CN117576180A (zh) * | 2024-01-15 | 2024-02-20 | 常熟理工学院 | 基于自适应多尺度窗口的多视图深度估计方法及应用 |
| CN117576180B (zh) * | 2024-01-15 | 2024-03-26 | 常熟理工学院 | 基于自适应多尺度窗口的多视图深度估计方法及应用 |
| CN118864350A (zh) * | 2024-06-07 | 2024-10-29 | 无锡学院 | 一种应用于输电线路检修的螺栓定位算法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019220099A (ja) | ステレオマッチング処理装置、ステレオマッチング処理方法、及びプログラム | |
| CN111968229B (zh) | 高精度地图制图方法及装置 | |
| CN110568447B (zh) | 视觉定位的方法、装置及计算机可读介质 | |
| US8199977B2 (en) | System and method for extraction of features from a 3-D point cloud | |
| JP4392507B2 (ja) | 3次元サーフェス生成方法 | |
| KR101681095B1 (ko) | 컬러 영상과 시점 및 해상도가 동일한 깊이 영상 생성 방법 및 장치 | |
| JP5955028B2 (ja) | 画像処理装置、画像処理方法および画像処理用のプログラム | |
| CN105336005B (zh) | 一种获取目标物体体征数据的方法、装置及终端 | |
| US11348271B2 (en) | Image processing device and three-dimensional measuring system | |
| KR102407137B1 (ko) | 영상 처리 방법 및 장치 | |
| US11803982B2 (en) | Image processing device and three-dimensional measuring system | |
| Gadasin et al. | Reconstruction of a three-dimensional scene from its projections in computer vision systems | |
| Shivakumar et al. | Real time dense depth estimation by fusing stereo with sparse depth measurements | |
| EP4064206A1 (en) | Three-dimensional model generation method and three-dimensional model generation device | |
| CN117456114A (zh) | 基于多视图的三维图像重建方法及系统 | |
| CN105701787B (zh) | 基于置信度的深度图融合方法 | |
| KR101926953B1 (ko) | 4카메라 그룹 평면 어레이의 특징점의 매칭 방법 및 그에 기초한 측정 방법 | |
| CN113052880A (zh) | 一种sfm稀疏重建方法、系统及应用 | |
| WO2023199583A1 (ja) | ビューワ制御方法及び情報処理装置 | |
| US20240296621A1 (en) | Three-dimensional model generation method and three-dimensional model generation device | |
| CN108564604B (zh) | 基于平面约束和三角剖分的双目视觉立体匹配方法及装置 | |
| JP4424797B2 (ja) | 立体形状検出方法 | |
| JP4701848B2 (ja) | 画像マッチング装置、画像マッチング方法および画像マッチング用プログラム | |
| WO2023088127A1 (zh) | 室内导航方法、服务器、装置和终端 | |
| Kyöstilä et al. | Merging overlapping depth maps into a nonredundant point cloud |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220621 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20221011 |