JP2019505902A - 自動航空機システム操作用システム及び方法 - Google Patents
自動航空機システム操作用システム及び方法 Download PDFInfo
- Publication number
- JP2019505902A JP2019505902A JP2018534095A JP2018534095A JP2019505902A JP 2019505902 A JP2019505902 A JP 2019505902A JP 2018534095 A JP2018534095 A JP 2018534095A JP 2018534095 A JP2018534095 A JP 2018534095A JP 2019505902 A JP2019505902 A JP 2019505902A
- Authority
- JP
- Japan
- Prior art keywords
- aircraft system
- rotor
- detecting
- event
- operating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U20/00—Constructional aspects of UAVs
- B64U20/80—Arrangement of on-board electronics, e.g. avionics systems or wiring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/26—Ducted or shrouded rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U70/00—Launching, take-off or landing arrangements
- B64U70/10—Launching, take-off or landing arrangements for releasing or capturing UAVs by hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U70/00—Launching, take-off or landing arrangements
- B64U70/30—Launching, take-off or landing arrangements for capturing UAVs in flight by ground or sea-based arresting gear, e.g. by a cable or a net
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0607—Rate of change of altitude or depth specially adapted for aircraft
- G05D1/0653—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing
- G05D1/0661—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing specially adapted for take-off
- G05D1/0669—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing specially adapted for take-off specially adapted for vertical take-off
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0607—Rate of change of altitude or depth specially adapted for aircraft
- G05D1/0653—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing
- G05D1/0676—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing specially adapted for landing
- G05D1/0684—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing specially adapted for landing on a moving platform, e.g. aircraft carrier
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/48—Control of altitude or depth
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/652—Take-off
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/654—Landing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/14—Flying platforms with four distinct rotor axes, e.g. quadcopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
ハウジングによって囲まれたロータを有する航空機システムを制御する方法であって:ロータを飛行モードで操作するステップと、航空機システムがつかまれていることを表すつかみ事象を検出するステップと、ロータを自動的にスタンバイモードで操作するステップと、を具える方法。航空機システムの外側面に垂直に伸びる中央軸を具える航空機システムを制御する方法であって:ハウジングで囲まれたロータセットで第1空気力学的力を発生するステップと、中央軸と重力ベクトルとの間の鋭角が閾値角度より大きいことを検出するステップと、を具え、ロータセットの各ロータが、ロータセットによる第1空気力学的力より小さい第2空気力学的力を共働して発生する、方法。【選択図】 図1
Description
本発明は、一般的に、航空機システムの分野に関し、特に、航空機システムの分野における自動航空機システム操作用の新規かつ有用なシステムと方法に関する。
関連出願のクロスリファレンス
本出願は、2015年12月29日に出願した国際特許出願PCT/CN2015/099339号、2016年1月11日に出願したPCT/CN2016/070579号、2016年1月11日に出願したPCT/CN2016/070583号、2016年1月11日に出願したPCT/CN2016/070581号、の一部継続出願である。これらはすべて引用により、全体がここに組み込まれている。
本出願は、2015年12月29日に出願した国際特許出願PCT/CN2015/099339号、2016年1月11日に出願したPCT/CN2016/070579号、2016年1月11日に出願したPCT/CN2016/070583号、2016年1月11日に出願したPCT/CN2016/070581号、の一部継続出願である。これらはすべて引用により、全体がここに組み込まれている。
本出願は、2016年6月22日に出願した米国暫定出願第62/353,337号、2016年4月22日に出願した米国暫定出願第62/326,600号の利益を請求する。これらは両方とも引用により全体がここに組み込まれている。
本発明の好ましい実施例についての以下の説明は、本発明をこれらの好ましい実施例に限定することを意図するものではなく、むしろ、この分野における当業者が本発明を製造し使用できるようにするものである。
1.概説
図1に示すように、自動航空機システム操作方法100は:航空機システムを飛行モードで操作するステップS120と、スタンバイ事象を検出するステップS150と、スタンバイモードの航空機システム操作するステップS160と、を具える。この方法100は、さらに、飛行事象を検出するステップS110と、制御指示を受信するステップS130と、及び/又は制御指示に応じて航空機システムを操作するステップS140と、を具える。
図1に示すように、自動航空機システム操作方法100は:航空機システムを飛行モードで操作するステップS120と、スタンバイ事象を検出するステップS150と、スタンバイモードの航空機システム操作するステップS160と、を具える。この方法100は、さらに、飛行事象を検出するステップS110と、制御指示を受信するステップS130と、及び/又は制御指示に応じて航空機システムを操作するステップS140と、を具える。
この方法は、航空機システムの飛行を、制御指示の受信に関係なく、自動的に中止するように機能する。第1変形例では、航空機システムは、航空機システムが飛行中に制止されていることを自動的に検出し、航空機システムの制止の検出に応じて自動的にスタンバイモードで操作する。特定例では、航空機システムは、ユーザが航空機システムが飛行中であるあるいは空中にあることを把握すると(例えば、図2に示すように)、そのリフト機構を低速にするか停止させる。第2変形例では、航空機システムが着陸地点を自動的に認識し、その着陸地点に着陸するように自動的に操作を行う。第1の特定例では、航空機システムは、航空機システムの下のユーザの手を自動的に検出し(例えば、視野が下側を向いたカメラと、視覚分析法を用いて)、プロペラの速度を徐々に落として、ユーザの手の上に航空機システムを着陸させる。第2特定例では、航空機システムが航空機システムの前にある着陸地点を自動的に検出し、その着陸地点に向けて自動的に飛行し、リフト機構を自動的に制御して着陸地点に着陸させる。しかしながら、この方法は、他の方法で航空機システムの飛行を中止することができる。
この方法は、さらに、制御指示の受信に関係なく、航空機システムを自動的に飛行させるように機能する。第1変形例では、航空機システムが解放されると(例えば、ユーザの手から)、航空機システムが自動的にホバリングする(例えば、適所で)。第2変形例では、航空機システムは、加力ベクトルに沿って投げられているあるいは押されている航空機システムに応じて、加力ベクトルに沿って自動的に飛行し、停止し、ホバリングする。第3変形例では、航空機システムは、ユーザの手から自動的に離陸することができる。しかしながら、この方法は、その他の方法で、航空機システムを飛行させることができる。
2.利点
この方法は、従来のシステムを超える数々の利点を提供できる。第1に、航空機システムのスタンバイモードに自動的に入り、航空機システムの始動に応じて自動的に飛行させ、及び/又はユーザの手又はユーザが特定する着陸地点に自動的に着陸することによって、この方法は、航空機システムとのユーザの間のより使いやすい相互作用を可能にする。第2に、外部からの制御指示を受けることに関係なく、自動的に動作することによって、この方法は、ユーザを航空機システムのフライトのこれらの態様を制御しなくても済むようになる。これによって、ユーザは補助システム(例えば、カメラシステム)を制御したり、マルチタスク処理を最小限にしたり、あるいは、航空機システムのフライトに必要なユーザとの相互作用を減らすことができる。しかしながら、この方法は、その他の適切な利点セットを提供することができる。
この方法は、従来のシステムを超える数々の利点を提供できる。第1に、航空機システムのスタンバイモードに自動的に入り、航空機システムの始動に応じて自動的に飛行させ、及び/又はユーザの手又はユーザが特定する着陸地点に自動的に着陸することによって、この方法は、航空機システムとのユーザの間のより使いやすい相互作用を可能にする。第2に、外部からの制御指示を受けることに関係なく、自動的に動作することによって、この方法は、ユーザを航空機システムのフライトのこれらの態様を制御しなくても済むようになる。これによって、ユーザは補助システム(例えば、カメラシステム)を制御したり、マルチタスク処理を最小限にしたり、あるいは、航空機システムのフライトに必要なユーザとの相互作用を減らすことができる。しかしながら、この方法は、その他の適切な利点セットを提供することができる。
3.システム
図5に示すように、この方法は、一またはそれ以上の航空機システム1で使用することが好ましく、選択的に、遠隔コンピュータシステム(例を図6に示す)と共に、あるいはその他の適切なシステムと共に使用することができる。航空機システム1は、飛行するよう機能し、さらに、写真を撮影する、貨物を送達する、及び/又は無線通信を中継するように機能する。航空機システム1は、好ましくは、回転翼航空機(例えば、クアッドコプター、ヘリコプター、サイクロコプター、他)であるが、代替的に、固定翼航空機、軽航空機であってもよく、あるいはその他の適切な航空機システム1であってもよい。航空機システム1は、リフト機構、電源、センサ、処理システム、通信システム、本体、及び/又はその他の適切な機器を具えている。
図5に示すように、この方法は、一またはそれ以上の航空機システム1で使用することが好ましく、選択的に、遠隔コンピュータシステム(例を図6に示す)と共に、あるいはその他の適切なシステムと共に使用することができる。航空機システム1は、飛行するよう機能し、さらに、写真を撮影する、貨物を送達する、及び/又は無線通信を中継するように機能する。航空機システム1は、好ましくは、回転翼航空機(例えば、クアッドコプター、ヘリコプター、サイクロコプター、他)であるが、代替的に、固定翼航空機、軽航空機であってもよく、あるいはその他の適切な航空機システム1であってもよい。航空機システム1は、リフト機構、電源、センサ、処理システム、通信システム、本体、及び/又はその他の適切な機器を具えている。
航空機システムのリフト機構は、リフトを提供するように機能し、好ましくは、一またはそれ以上のモータで駆動する(個別にあるいは全体的に)ロータセットを具えている。各ロータは、好ましくは、対応するロータ軸を中心に回転し、そのロータ軸に垂直な対応するロータ面を規定し、そのロータ面上の受風面積を掃引するように構成されている。モータは、好ましくは、ロータに十分な動力を提供して、航空機システムを飛行できるように構成されており、より好ましくは、2またはそれ以上のモードで操作可能であり、そのうちの少なくとも一つは、飛行に十分な動力を提供するモードを具え、また、そのうちの少なくとも一つは、飛行に必要な動力より少ない動力を提供する(例えば、最小飛行動力の10%を提供する、他)モードを具える。モータによって提供される動力は、好ましくは、ロータがそのロータ軸を中心に回転する角速度に影響する。航空機システムの飛行中は、ロータセットは、航空機システム1によって発生する総空気力学的力(おそらく、高対気速度で飛行中の場合など、本体で発生するけん引力を除く)のほぼすべて(例えば、99%以上、95%以上、90%以上、75%以上)を共働して又は個別に発生するように構成されていることが好ましい。代替的にあるいは追加で、航空機システム1は、ジェットエンジン、ロケットエンジン、翼、太陽帆、及び/又はその他の適切な力発生機器といった、航空機システムの飛行用の力を発生するよう機能する、その他の適切な飛行用機器を具えていてもよい。
一変形例では、航空機システム1は、4つのロータを具えており、各ロータは航空機システム本体のコーナーに配置されている。4つのロータは、好ましくは航空機システム本体の周りにほぼ均等に分散しており、各ロータ面は好ましくは、航空機システム本体の外側面(例えば、縦軸と横軸を含む)にほぼ平行(例えば、10°以内)である。ロータは、好ましくは、航空機システム1全体の比較的大きな部分(例えば、90%、80%、75%、又は、航空機システムの設置面積の大部分、又は、航空機システム1のその他の適切な割合)を占めている。例えば、各ロータの直径の2乗は、システムの主平面(例えば、外側面)上の航空機システム1の投影の凸包の閾値より大きくてもよい(例えば、10%、50%、75%、90%、110%)。しかしながら、ロータは別の方法で配置できる。
航空機システムの電源は、航空機システムの動的機器(例えば、リフト機構のモータ、電源、他)に電力を供給する。電源は、本体に装着して、動的機器に接続することができ、あるいは別の方法で配置できる。電源は、再充電可能なバッテリィ、二次電池、一次電池、燃料電池、あるいは、その他の適切な電源である。
航空機システムのセンサは、航空機システムの周囲環境及び/又は航空機システム操作を表す信号を取得するよう機能する。センサは、好ましくは本体に装着されているが、代替的にその他の適切な機器に装着することもできる。センサは、好ましくは電源から電力が供給され、プロセッサによって制御されるが、その他の適切な機器に接続して相互作用するようにしてもよい。センサは:カメラ(例えば、CCD、CMOS、多重スペクトル、有視界、ハイパースペクトル、立体、他)、方位センサ(例えば、慣性測定センサ、加速度計、ジャイロスコープ、高度計、磁力計、他)、音響センサ(例えば、トランスデューサ、マイクロホン、他)、バロメータ、光センサ、温度センサ、電流センサ(例えば、ホール効果センサ)、風量計、電圧計、タッチセンサ(例えば、抵抗、容量、他)、近接センサ、力センサ(例えば、歪ゲージ計、ロードセル)、振動センサ、化学センサ、太陽光センサ、位置センサ(例えば、GPS、GNSS、三角測量、他)、又はその他の適切なセンサ、の一またはそれ以上を具えていてもよい。一変形例では、航空機システム1は、航空機システム本体の第1端部に沿って装着した(例えば、静的に、又は回転可能に)、本体の外側面と交差する視野を持つ第1カメラと;航空機システム本体の底部に沿って装着した、外側面にほぼ平行な視野を持つ第2カメラと;高度計と加速度計などの方位センサセットと、を具える。しかしながら、システムは、その他の適切な数のセンサタイプを具えていてもよい。
航空機システムの処理システムは、航空機システム操作を制御するよう機能する。処理システムは、以下の方法を実行できる;飛行中に航空機システムを安定させる(例えば、飛行中の航空機システムの揺れを最小にするようロータを選択的に操作する);遠隔制御指示を受信し、解析し、それに基づいて航空機システム1を操作する;あるいは、別のやり方で航空機システム操作を制御する。処理システムは、好ましくは、センサでサンプリングした測定値を、より好ましくは、異種センサでサンプリングした測定値の組み合わせ(例えば、カメラと加速度計のデータを組み合わせる)を受信し、解析するように構成されている。航空機システム1は、一またはそれ以上処理システムを具えており、異なるプロセッサが同じ機能を実行することができる(例えば、マルチコアシステムとして機能する)か、あるいは特化されていてもよい。処理システムは:プロセッサ(例えば、CPU、GPU、マイクロプロセッサ、他)、メモリ(例えば、フラッシュ、RAM、他)、あるいはその他の適切な機器、の一またはそれ以上を具えていてもよい。処理システムは、好ましくは本体に装着されているが、代替的にその他の適切な機器にとりつけてもよい。処理システムは、好ましくは電源によって電力供給されているが、その他の方法で電力供給するようにしてもよい。処理システムは、好ましくはセンサ、通信システム、及びリフト機構に接続され、これらを制御するが、追加で、あるいは代替的に、その他の適切な機器に接続して、これと相互作用するようにしてもよい。
航空機システムの通信システムは、一またはそれ以上の遠隔コンピュータシステムと通信するように機能する。通信モジュールは、長距離通信モジュール、短距離通信モジュール、あるいはその他の適切な通信モジュールである。通信モジュールは有線/又は無線通信を容易にする。通信モジュールの例には、802.11x、Wi−Fi、Wi−Max、NFC、RFID、Bluetooth、Bluetooth Low Energy、ZigBee、セルラー通信工業会(例えば、2G、3G、4G、LTE、他)、ラジオ(RF)、有線接続(例えば、USB)、あるいはその他の適切な通信モジュール又はその組み合わせ、がある。通信システムは、好ましくは電源から電力を供給するが、その他の方法で電力供給してもよい。通信システムは、好ましくは、処理システムに接続されているが、追加で、あるいは代替的に、その他の適切な機器に接続して相互作用することができる。
航空機システムの本体は、航空機システムの機器を支持するように機能する。本体には、さらに、航空機システムの機器を保護する機能もある。本体は、好ましくは、通信システム、電源、処理システムを実質的に囲んでいるが、別の方法で構成してもよい。本体は、プラットフォーム、ハウジング、あるいはその他の適切な構造を具えている。一変形例では、本体は、通信システムと、電源と、処理システムを保護する主本体と、ロータ回転面に平行に延在し、主本体の第1及び第2側部に沿って配置した第1及び第2のフレーム(例えば、ケージ)を具えていてもよい。これらのフレームは、回転するロータと保持機構(例えば、ユーザの手のような保持機構)との間の中間機器として機能する。フレームは、本体の単一側部に沿って(例えば、ロータの底に沿って、ロータの上部に沿って)、本体の第1及び第2側部に沿って(例えば、ロータの上部及び底に沿って)延在する、ロータを囲む(例えば、ロータの全側部に沿って延在する)、あるいは別の方法で構成されていてもよい。フレームは、主本体に静的に、あるいは動作可能に装着されている。
フレームは、一またはそれ以上のロータを周囲環境に流体連通して接続する一またはそれ以上の開口(例えば、空気流開口)を具えていてもよい。この開口は、周囲環境とロータとの間で空気が流れる及び/又はその他の適切な流体が流れるように機能する(例えば、ロータが、航空機システムを周囲環境を通って移動させる空気力学的力を作ることができる)。この開口は、細長であってもよく、相当の長さと幅を有するものであってもよい。開口は、ほぼ同じであるか、互いに異なっていてもよい。開口は、好ましくは、保持機構の構成要素(例えば、手の指)が開口を通過しないように十分に小さい。ロータ近傍のフレームの幾何学的透明性(例えば、総面積に対する開面積の比)は、航空機システムが飛行できる、より好ましくは高性能飛行操縦できるように十分に大きいことが好ましい。例えば、各開口は、閾値サイズ(例えば、全寸法における閾値サイズより小さい、閾値サイズより狭いが、有意に長い細長いスロット、他)より小さくてもよい。特定の例では、フレームは80なし90%の幾何学的透明性を有し、開口(例えば、円、正五角形などの多角形、他)は、各々、直径12乃至16mmの限局性の円を規定する。しかしながら、本体は別の方法で構成することができる。
本体(及び/又はその他の適切な航空機システム機器)は、保持機構(例えば、人の手、航空機システムドック、クロー、他)によって保持できる保持領域を規定することができる。この保持領域は、好ましくは、一またはそれ以上のロータの一部を取り囲んでおり、より好ましくは全ロータを完全に取り囲んで、これによって、ロータと保持機構又は航空機システム1近傍のその他の物体の間の意図しない相互作用を防止している。例えば、保持領域の航空機システム面(例えば、外側面、ロータ面、他)への投影は、同じ航空機システム面への一またはそれ以上のロータの掃引領域(例えば、一のロータの掃引領域、ロータセットの全掃引領域、他)の投影と重なっていてもよい(例えば、部分的に、完全に、大部分が、少なくとも90%が、他)。
航空機システム1は、さらに、入力(例えば、マイクロホン、カメラ、他)、出力(例えば、ディスプレイ、スピーカ、発光素子、他)、又はその他の適切な機器を具えていてもよい。
遠隔コンピュータシステムは、補助ユーザ入力を受信するように機能し、さらに、自動的に航空機システム1用の制御指示を生成して、航空機システム1にこの制御指示を送信する。各航空機システム1は、一またはそれ以上の遠隔コンピュータシステムによって制御することができる。遠隔コンピュータシステムは、好ましくは、クライアント(例えば、ネーティブアプリケーション、ブラウザアプリケーション、他)を介して航空機システム1を制御するが、その他の方法で航空機システム1を制御するようにしてもよい。遠隔コンピュータシステムは、ユーザのデバイス、遠隔サーバシステム、接続器具であってもよく、あるいはその他の適切なシステムであってもよい。ユーザデバイスの例には、タブレット、スマートホン、モバイルホン、ラップトップ、時計、ウエアラブルデバイス(例えば、眼鏡)、又はその他の適切なユーザデバイスである。ユーザデバイスは、電力貯蔵システム(例えば、バッテリィ)、処理システム(例えば、CPU、GPU、メモリ、他)、ユーザ出力(例えば、ディスプレイ、スピーカ、振動機構、他)、ユーザ入力(例えば、キーボード、タッチスクリーン、マイクロホン、他)、位置測定システム(例えば、GPSシステム)、センサ(例えば、光センサとカメラなどの光学センサ、加速度計、ジャイロスコープ、及び高度計などの方位センサ、マイクロホンなどの音響センサ、他)、データ通信システム(例えば、WiFiモジュール、BLE、セルラーモジュール、他)、あるいはその他の適切な機器、がある。
4.方法
飛行事象を検出するステップS110は、差し迫った操作事象の要求、あるいは別の航空機システムの飛行に関連する要求を検出するように機能する。差し迫った操作事象は、自然落下(例えば、重力ベクトルに平行な第1軸に沿った航空機システムの動き)、緊急落下、あらかじめ決められた方位内の航空機システムの配置(例えば、0.5秒といった所定時間の重力ベクトルに直交する方向からあらかじめ決められた範囲内における主航空機面の配置)、空中での航空機システムの手動サポート(例えば、加速度パターン、回転パターン、振動パターン、温度パターン、他に基づく)、あるいはその他の適切な差し迫った操作事象であってもよい。ステップS110は、好ましくは、差し迫った操作に関連するセンサ信号の変化の検出を具える。この変化は、好ましくは、搭載されたセンサ(例えば、方位センサ)から受信した信号に基づいて処理システムによって検出されるが、代替的に、遠隔コンピュータシステム(例えば、センサ信号が遠隔コンピュータシステムに送信される)によって検出するようにしてもよく、あるいはその他の適切なシステムで検出してもよい。あらかじめ決められた変化は、製造者によって設定する、遠隔コンピュータシステムを稼働させているクライアントから受信する、ユーザから受信する、あるいは別の方法で決定することができる。この変化は:あらかじめ決められた頻度で、新たに方位センサ信号を受信するたびに、あるいはその他の適切な時点で、決定することができる。あらかじめ決められた変化は、信号の変化、パラメータの変化(例えば、加速度変化量、速度変化量、他)、変化率(例えば、加速度変化率)、又はその他の適切な変化であってもよい。
飛行事象を検出するステップS110は、差し迫った操作事象の要求、あるいは別の航空機システムの飛行に関連する要求を検出するように機能する。差し迫った操作事象は、自然落下(例えば、重力ベクトルに平行な第1軸に沿った航空機システムの動き)、緊急落下、あらかじめ決められた方位内の航空機システムの配置(例えば、0.5秒といった所定時間の重力ベクトルに直交する方向からあらかじめ決められた範囲内における主航空機面の配置)、空中での航空機システムの手動サポート(例えば、加速度パターン、回転パターン、振動パターン、温度パターン、他に基づく)、あるいはその他の適切な差し迫った操作事象であってもよい。ステップS110は、好ましくは、差し迫った操作に関連するセンサ信号の変化の検出を具える。この変化は、好ましくは、搭載されたセンサ(例えば、方位センサ)から受信した信号に基づいて処理システムによって検出されるが、代替的に、遠隔コンピュータシステム(例えば、センサ信号が遠隔コンピュータシステムに送信される)によって検出するようにしてもよく、あるいはその他の適切なシステムで検出してもよい。あらかじめ決められた変化は、製造者によって設定する、遠隔コンピュータシステムを稼働させているクライアントから受信する、ユーザから受信する、あるいは別の方法で決定することができる。この変化は:あらかじめ決められた頻度で、新たに方位センサ信号を受信するたびに、あるいはその他の適切な時点で、決定することができる。あらかじめ決められた変化は、信号の変化、パラメータの変化(例えば、加速度変化量、速度変化量、他)、変化率(例えば、加速度変化率)、又はその他の適切な変化であってもよい。
差し迫った操作を表す変化は、ユーザから受け取っても、クライアントから受け取っても、自動的に学習(例えば、ラベル化した「加速度計パターンの訓練学習に基づいて」)してもよく、あるいはその他の方法で決定できる。実際の変化は、その実際の変化が差し迫った操作を表すあらかじめ決められた変化に実質的に合致するのであれば、差し迫った操作を表す変化であると考えられ、差し迫った操作を表す変化として分類され、差し迫った操作を表すパターンパラメータ値と実質的に合致し、あるいはその他の方法で検出できる。
方位センサ信号は、あらかじめ決められた変化を周期的にモニタしており、この信号をモニタリングするステップは、以前の方位センサ信号セットを一時的にキャッシングするステップと、キャッシュした方位センサ信号と、新しい方位センサ信号との変化を決定するステップと、を具える。しかしながら、方位センサ信号は他の方法でモニタするようにしてもよい。一実施例(図3に示す)では、あらかじめ決められた変化が加速度(例えば、正しい加速度)、あるいは実質的にゼロに等しくなっている(例えば、0.1gより小さい、0.3gより小さい、航空機システムで観察された典型的な加速度の閾値の一部より例えば、10%又は30%小さい、他)加速度成分(例えば、重力ベクトルに関連する軸に沿った)、ゼロに向けての降下、閾値レートを超えたゼロに向けての降下、あるいは、その他の適切な絶対値変化、変化パターン、又は自然落下を表すその他の変化の表示であってもよい。重力ベクトルに関連する軸は、重力ベクトルの平行な軸、あらかじめ決められた航空機システムの軸及び/又は方位センサ軸(例えば、航空機システムの側方面に直交する中心軸)であってもよく、あるいは、その他の適切な軸であってもよい。特定の例では、飛行事象を検出するステップS110は、航空機システム本体に搭載された加速度計で実質的にゼロに等しい適切な加速度を検出するステップを具える。
この実施例の第1変形例では、この軸が航空機システムの底部(例えば、航空機システムのハウジングの底)に直交する軸である。第2変形例では、航空機システムが重力ベクトルに平行な軸を認識できる。これは、重力加速度の大きさとほぼ同じであるか、それより高い測定した加速度が(例えば、あらかじめ決められた時間)測定された軸を認識するステップを具える。この変形例では、あらかじめ決められた変化が生じたことの決定時に、この方法が、追加で、その他の軸からのセンサの測定値を分析して、航空機システムが本当に自然落下であるかどうか(例えば、その他の軸からの測定値が、重力加速度の大きさより小さい)、あるいは単に回転していただけであるかどうか(例えば、一又はそれ以上のその他の軸からの測定値が、重力加速度の大きさより大きいか、あるいはそれと同じである)を決定する。追加であるいは代替的に、この変形例では、この方法が、加速度測定値を異種の方位情報(例えば、ジャイロスコープや、カメラなどの一またはそれ以上のセンサからの測定値)と関連付けるステップを具えていてもよい。この方法は、選択的に、あらかじめ決められた軸(例えば、航空機システムの縦軸)についての測定値を選択的に無視するあるいは考慮しないようにすることもできる。しかしながら、この軸はその他の方法で決定することができ、あるいは単一の軸を用いなくてもよい(例えば、代わりに、トータルの大きさに依存する)。
第2実施例(図4に示す)では、高度計信号を周期的にモニタして、あらかじめ決められた変化を求めている。このあらかじめ決められた変化は、あらかじめ決められた高度の低下、あらかじめ決められた高度の変化率、あるいはその他の適切な変化である。
第3実施例では、加速度計及び/又はジャイロスコープ信号を周期的にモニタして、航空機システムがほぼ水平包囲に支持されていることを表示する(例えば、航空機システムの底に対して垂直な軸が、重力ベクトルから、1°、5°、10°、又は15°といった閾値角度内にある)。一例では、空間センサ信号が、航空機システムが閾値時間(例えば、100ms、350ms、1s、2s、5s、他)より長い時間ほぼ水平に支持されていたことを示すときに、ステップS110で飛行事象が検出されるが、航空機システムはスタンバイ状態にあり、ソナーと光センサがフライト制御用の有効データをサンプリングしている。しかしながら、差し迫った操作を表す変化は、他の方法で検出できる。
飛行モードにおける航空機システムを操作するステップS120は、航空機システムを飛行させるように機能する。ステップS120は、好ましくは、飛行モードでリフト機構を操作するステップを具えるが追加で、又は代替的に、飛行モードでその他の適切な航空機システムの機器を操作するステップを具えていてもよい。航空機システムは、好ましくは、処理システムによって自動的に操作されるが、代替的に、遠隔コンピュータシステム又はその他の適切なシステムによって自動的に操作するようにしてもよい。航空機システムは、好ましくは、飛行モードS120で、飛行事象を検出するステップS110に応じて自動的に操作されるが、追加であるいは代替的に、飛行事象の検出S120の後、あらかじめ決められた時間経過後、飛行システムの高度があらかじめ決められた高度変化を超えて変化した後(例えば、高度計で検出される)、あるいはその他の適切な時間に操作するようにしてもよい。航空機システムは、好ましくは、操作パラメータセットにしたがって操作され、ここでは、操作パラメータがあらかじめ決められている、選択される(例えば、変化が検出されたときあるいは変化の検出される前のセンサ測定値の組み合わせに基づいて、センサ測定パターンの分類又は組み合わせに基づいて、他)、あるいは他の方法で決定される。操作パラメータには、リフト機構に提供された電力(例えば、電圧、電流、他)、リフト機構の速度又は出力、タイミング、ターゲットセンサ測定値、あるいはその他の適切な操作パラメータが含まれる。
航空機システムは、前向きのカメラ、下向きのカメラ、方位センサ、レーザシステム(例えば、レンジファインダ、LIDAR)、レーダー、ステレオカメラシステム、飛行時間、あるいはその他の適切な、光学、音響、距離測定、あるいはその他のシステムからの信号を用いて、飛行モードで操作できる。航空機システムは、RRT、SLAM、運動学、オプティカルフロー、機械学習、ルールに基づくアルゴリズム、又はその他の適切な方法を用いて信号処理を行うことができる。特定の例では、経路移動モードは、前向きのカメラで撮った一連の画像をサンプリングするステップと、この一連の画像と、航空機システムに搭載されて稼動している位置決め方法(例えば、SLAM)を用いて3−D空間内の航空機システムの物理的位置を自動的に決めるステップを具える。第2特定例では、経路移動モードは、下向きのカメラで撮影した一連の画像をサンプリングするステップ(例えば、60fpsで、あるいはその他の適切な周波数でサンプリング)と、航空機システムの位置又は運動(例えば、速度、加速度)の検出を支援できる、航空機システムと、サンプリングした画像に基づく地上間の明らかな動きを自動的に検出するステップ(例えば、オプティカルフローを用いて)、及び、検出した明らかな動きに基づいて航空機システムのバランス又は位置を自動的に補正するステップと、を具える。第3特定例では、第1特定例を用いて決定した航空機システムの位置と、第2特定例を用いて決定した航空機システムの運動を、フライト制御アルゴリズムに送り、ホバリング、飛行、あるいはその他の航空機システムの制御を行うことができる。
飛行モードは、好ましくは、航空機システムの空中位置(例えば、垂直位置、水平位置、他)がほぼ維持されるホバリングモードを具えるが、代替的に書他の適切な飛行モードであってもよい。飛行モードは、好ましくは、航空機システムの方位を、航空機システムの外側面に垂直な中央軸が重力ベクトルにほぼ平行(例えば、20°以内、10°以内、3°以内、1°以内、他)になるように維持するステップを具える。しかしながら、この中央軸は、その他の方法で維持するようにしてもよい。飛行モードは、好ましくは、重力によって航空機システムにかかる力と同じ又は反対に、リフトシステムで力を発生するステップ(例えば、ホバリングに)を具えるが、代替的に、重力より大きい又は小さい縦方向の力を発生する(例えば、高度を上げる又は下げる、及び/又は、航空機システムの縦方向の動きを阻んで、航空機システムをホバリング状態にする)ステップを具えていてもよい。飛行モードは、追加であるいは代替的に、非垂直の力及び/又はトルク(例えば、航空機システムをピッチ又はロールに代える、横方向に動かす又は横方向の動きを阻む、他)を発生するステップを具えていてもよい。例えば、飛行モードは、方位、位置、及び/又は速度変化を検出するステップ、この変化が風によるものか、及び/又は、衝突などの別の外部摂動によるものかを決定するステップ(例えば、風、又は衝突事象として変化を分類し、風の摂動の可能性を決定し、つかみ事象である摂動の可能性を決定するステップ、他)、及び、リフト機構を相殺してこの変化を補正し、元のあるいは所望の位置、方位、及び/又は速度に戻すステップ、を具えていてもよい。
飛行モードは、追加であるいは代替的に、経路移動モード(例えば、直線方向に飛行する、あらかじめ決められた経路に沿って飛行する、他)、プログラムモード(例えば、飛行プログラムに基づいて動的に決定された経路に沿って飛行する、ある者を追跡するあるいは周りをまわる、あるいは、カメラの視野内にその者の顔を維持する、他、といった顔及び/又は身体追跡に基づいて飛行する)、及び/又はその他の適切なモードを具えていてもよい。飛行モードは、追加で、本体に装着した(あるいは、その他の方法で機械的に連結した)航空機カメラを用いて画像を捕捉するステップ(例えば、単一画像を保存するステップ、ビデオをストリーミングするステップ)を具えていてもよい。
飛行モードは追加で又は代替的に、撮像モードを具えていてもよく、ここでは、航空機システムが自動的に撮像ターゲット(例えば、人物、顔、物体、他)を認識し、物理的スペースを通ってこの撮像ターゲットを自動的に追跡するようにその飛行を制御する。一変形例では、航空機システムは、物体認識及び/又は追跡方法、顔認識及び/又は追跡方法、身体認識及び/又は追跡方法、及び/又はその他の適切な方法をサンプリングした画像(例えば、前向きのカメラからの画像)上で稼働させて、撮像ターゲットを認識し追跡する。特定例では、航空機システムは、システム自体の周りのほぼ360°の領域を自動的に撮像する(たとえば、中央軸の周りを回転させて、その周りをカメラを移動させて、360°のカメラを用いて、他)ことができ、自動的に画像から撮像ターゲットを認識して、物理的空間の周りで自動的に撮像ターゲット(例えば、自動的に認識した、あるいは手動で選択した)を追跡することができる。しかしながら、撮像モードは、その他の方法で実行することができる。しかしながら、飛行モードは、その他の適切な操作モードセットを具えていてもよい。
航空機システムは、各ロータの角速度及び/又は各ロータに送達される動力を独立して制御することで、飛行モードで操作することができる。しかしながら、ロータはグループであるいはその他の適切な態様で制御することができる。ステップS120は、好ましくは、ロータセットにおいて、航空機システムで発生した総空気力学的力とほぼ等しい、より好ましくは、航空機システムにかかった正味の力とほぼ等しい空気力学的力を発生するステップを具える(例えば、航空機システムは、周囲環境において、有意な空気力学的力を発生する、あるいは、有意な力をかけるように構成されたその他の機器を具えていない)。
一変形例では、飛行モードにある航空機システムは、各ロータのロータ角速度を取り込んで、スタンバイロータ速度(例えば、この速度で、ロータセットが飛行空気力学的力より低いスタンバイ空気力学的力を発生する)からフライトロータ速度(例えば、この速度でロータセットがほぼゼロの力、あるいは飛行空気力のわずかな部分といった飛行空気力学的力を発生する)にするステップを具える。この変形例では、飛行ロータ速度は、好ましくは、航空機システムがホバリングするホバリングロータ速度であり;代替的にこの速度はその他の適切な回転速度であってもよい。飛行速度は、あらかじめ設定する(例えば、製造者によって)、クライアントから受信する、自動的に決定する(例えば、信号変化率に基づいて)、あるいはその他の方法で決定することができる。スタンバイロータ速度は、低速であり(例えば、ホバリング速度の割合)、角速度はほぼゼロであり(例えば、ロータは回転していない)、あるいはその他の適切な速度であってもよい。スタンバイロータ速度は、あらかじめ設定する(例えば、製造者によって)、クライアントから受信する、あるいはその他の方法で決定することができる。ロータ速度は、スタンバイロータ速度から飛行ロータ速度に直ちに移行する、方位センサの信号変化率に基づいて移行する、あらかじめ決められた率で移行する、あるいはその他の適切な態様で移行することができる。
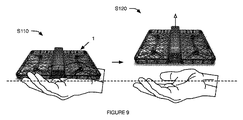
第1例では、回転速度はホバリング速度より高い速度にまず上がって、次いで、ホバリング速度に下がり、航空機システムが自然落下を止めて、自然落下が検出されたのちホバリングするようにしている。これは、支持面が突然外れたとき(図10参照)に航空機システムの自然落下を防止するよう機能する。第2例では、回転速度が加速度の変化率に比例する。特定例では、加速度の変化が自然落下に関連する変化率を超えるときに、回転速度がホバリング速度より早い(例えば、航空機システムが投げおろされたとき)。これは、航空機システムがより早くリカバーするように、あるいは初期の高度(例えば、変化が検出される前又はその後に測定した)をリカバーするように機能する。第2特定例では、回転速度が加速度の変化量に比例して上がる。操作中は、これによって、航空機システムがユーザから徐々に解放されるにつれて(図7参照)ロータが徐々にスプールアップする。第3特定例では、ロータの速度はあらかじめ決められた率で早くなる。操作中は、これによって、ロータが徐々にスプールアップして、航空機システムをユーザの手といった支持面から徐々に持ち上げる(図9参照)。この特定例では、この方法は追加で、支持面が突然取り外されたときに第1例に切り替えるステップを具える(例えば、方位センサ信号の突然の変化から決定する)。回転速度は、選択的に制限されて、伴流効果を防止するあるいは最小限にすることができる。しかしながら、リフト機構はその他の方法で、変化の検出に応じて操作することができる。
この方法は、選択的に、第2軸に関連するセンサ信号をモニタするステップと、第2軸に関連するセンサ信号に基づいてリフト機構の操作パラメータ(差し迫った操作の検出に応じたリフト機構の操作用)を決定するステップを具える。これは、停止又はホバリングの前に、航空機システムを第2軸に沿った距離だけ横に移動させるリフト機構操作パラメータを選択するよう機能する。第2軸は、好ましくは重力ベクトルにほぼ平行な軸と異なる(例えば、重力ベクトルにほぼ平行な軸に直交する、この軸に対して非ゼロ角度、他)が、代替的に同じでもよい。これらの軸は、航空機システムに対して固定されていてもよく、あるいは動的に変形されてもよい(例えば、可能であれば加速度計、ジャイロスコープ、カメラ、及び/又はその他の適切なセンサでサンプリングした測定値に基づいて、これらの軸を重力及び/又は周囲環境に対して、固定するよう試みる)。リフト機構操作パラメータの決定に考慮される第2軸用のセンサ信号は、第1軸用のセンサ信号と同時に、差し迫った操作の変化が検出される前、差し迫った操作の変化が検出された後(例えば、変化の検出に応じて)、あるいはその他の適時に取得したセンサ信号であってもよい。この距離は、あらかじめ決められていても、時間に基づいて決めても(例えば、航空機システムが解放された1秒間に第2軸に沿って横切る)、かかった力の量に基づいて決めてもよく、あるいはその他の適切な方法で決めてもよい。
図8に示す一変形例では、第2軸が本体の縦軸に対して平行であってもよい(例えば、カメラの視野と交差する)。第2軸に沿った加力を検出するステップ(例えば、変化検出の時間窓内)に応じて、航空機システムは自動的にリフト機構の操作支持を、加力に対向するように決定することができる。これは、航空機システムが、更なる横移動を停止する前に、第2軸に沿ってあらかじめ決められた距離移動できるように機能する。加力及び/又は加わった力の大きさは、第2軸(例えば、第2軸に関する加速度計)をモニタしている方位センサから決める、第2軸に直交する航空機システムの表面に沿って配置した力センサから決める、あるいは、その他の方法で決めることができる。対抗される加力は、あらかじめ決められた条件に合致した時の第2軸の瞬間的な力、差し迫った操作事象検出の時間窓内で測定された加力(例えば、最大力、最小力、他)、差し迫った操作事象検出と同時に測定した加力、あるいは、その他の適切な時間に測定したその他の力であってもよい。一例では、リフト操作指示は、ロータを取り込んで差し迫った操作事象検出の直後に、航空機システムをホバリングさせるステップと、航空機システムが差し迫った操作事象検出後直ちに航空機システムをホバリングさせるようにロータを取り込むステップと、あらかじめ決められた時間加力を用いて惰性で進むようにするステップと、リフト機構を制御して、あらかじめ決めた条件に合致した後に第2軸(又はその他の軸)に沿った更なる横移動をやめリフト機構を制御して航空機システムをホバリングさせる(例えば、ホバリング速度で操作するようリフト機構を制御するステップ)ステップと、を具える。第2例では、リフト操作指示が、加力による第2軸に沿った結果航空機システムの速度又は加速度を決定するステップ、差し迫った操作事象検出直後の第2軸に沿った航空機システムの速度又は加速度を、あらかじめ決められた条件に合致するまで維持するようにロータを取り込むステップと、あらかじめ決められた条件を満足した時に第2軸(又はその他の軸)に沿った更なる横移動を止めるようにリフト機構を制御するステップと、航空機システムをホバリングさせるようにリフト機構を制御するステップ(例えば、リフト機構をホバリング速度で操作するよう制御する)と、を具える。あらかじめ決めた条件は、差し迫った操作事象検出後の閾値時間内に、差し迫った操作事象検出後あらかじめ決めた条件に合致した後に(例えば、あらかじめ決められた距離だけ横移動した後、あらかじめ決められた時間が経過した後、その他)、あるいはその他適切な時間における、差し迫った操作事象検出であってもよい(例えば、ここでは差し迫った操作事象検出直後に、指示が実行される)。一例では、あらかじめ決められた条件は、かかった力の大きさ(例えば加速度の大きさ)に基づいて選択される。加力の大きさは、第2軸に沿ってかけられた力の大きさ、システムにかけられた力のトータルの大きさ(例えば、重力によってかかった力より小さい)であってもよく、あるいは、その他の方法で決めることができる。
第1特定例では、この指示の実行遅延が加力の量に比例しており、航空機システムの解放時のより大きい力がかかるときに、第2軸に沿った航空機システムの更なる横移動を停止する前に、航空機システムがさらに飛行する。第2特定例では、指示の実行遅延が加力の量に反比例しており、航空機システムの開放時により大きい力がかかるとき、停止前により短い距離航空機システムが飛行する。しかしながら、航空機システムは、第2軸に関するセンサ信号に基づいてほかの方法で操作するようにしてもよい。
この方法は、選択的に、航空機システムの高度に関連するセンサ信号をモニタするステップと、高度に基づいてリフト機構操作パラメータを決定するステップを具える。一変形例では、これは、リフト機構操作パラメータを選択して、初期航空機システム高度を取り戻すように機能する(例えば、回復前の自然落下による高度ロスを補償する)。高度は、高度計でサンプリングした信号に基づいて決める、及び/又は、相対高度は画像分析、距離測定(例えば、縦方向距離計を用いて、地面、床、及び/又は、天井からの距離を測定する)ことができる。リフト機構操作パラメータの決定に考慮される高度計信号(及び/又はその他の高度データ)は、第1軸に関するセンサ信号と同時に、差し迫った操作の変化が検出される前、差し迫った操作の変化が検出された後(例えば、変化の検出に応じて)、あるいはその他の適切な時間に取得した高度計信号であってもよい。例えば、この方法は、差し迫った操作事象検出からのあらかじめ決められた時間窓内(例えば、差し迫った操作事象検出の前、差し迫った操作事象検出の前に記録された高度計測定値に基づいた)の初期航空機システム高度を決定するステップと、ロータを巻き上げて差し迫った操作事象検出の直後に航空機システムをホバリングさせるステップと、ロータ速度を、航空機システムが安定した後に航空機システムが初期の航空機システム高度に到達するまで、ロータの速度を上げるステップと、を具える。しかしながら、高度計信号(及び/又はその他の高度データ)は、その他の適切な態様で使用することができる。
制御指示を受信するステップS130は、ユーザが自動航空機システム操作を増やす及び/又はオーバーライドできるように機能する。制御指示は、好ましくは航空機の飛行中に受信するが、追加で又は代替的に、飛行前及び/又はその他の適切な時間に受信することもできる。処理システムは、好ましくは、制御指示を受信するが、その他の適切なシステムが制御指示を受信することもできる。制御指示は、このましくはユーザから、ユーザ装置から、遠隔コントローラから、及び/又は航空機システムに関連するクライアント(例えば、ユーザシステムを稼働させている)から受信するが、代替的に、航空機システムに関連する位置から(例えば、その位置にあるデバイスから)、航空機システムに搭載したセンサ(例えば、手又は身体信号を解析する)、及び/又はその他の適切なシステムから受信することができる。ユーザは、航空機システムによって認識(例えば、顔あるいは身体の認識といった光学認識を介して)、することができ(例えば、航空機システムのセンサの範囲内で)、認識することができ、さもなければ航空機システムに関連する、又はその他の適切なユーザであってもよい。ユーザデバイス及び/又はクライアントは、航空機システムと対になることができ(例えば、ブルーツース接続を介して、航空機システムの開始時に動的に対になる、製造設備で対になる、他)、航空機システムについての相補的セキュリティキー対を持つ、航空機システムと同じユーザのアカウントに関連する、あるいはその他の方法でこの航空機システムに関連させることができる。制御指示は、ユーザが作成しても、ユーザデバイス又はクライアントで作成しても(例えば、ユーザの入力受信に応じて)、航空機システムに関連する位置にあるデバイスで作成しても、制御指示送信機の特性に基づいて決めても(例えば、位置出現特性、周辺環境音響特性、他)、航空機システムで作成しても、あるいはその他の適切な態様で作成又は決定してもよい。
一変形例では、制御指示が、着陸指示を具えている。第1実施例では、ステップS130が着陸地点を決定する(例えば、自動的に着陸地点を認識する)ステップを具える。これは、処理システム、遠隔コンピュータシステム、あるいはその他の適切なシステムによって、完全に、あるいは部分的に実行することができる。着陸地点は、航空機システムのセンサ測定値に基づいて自動的に決める、制御指示送信機から受信する、ユーザが特定する(例えば、クライアントに)、あるいはその他の方法で決めることができる。
この実施例の第1変形例では、保持機構の位置、タイプ、及び/又は構造に基づいて、保持機構(例えば、人の手、ドッキングステーション、捕獲デバイス、他)が着陸地点であると決められる。この変形例は、好ましくは、保持機構の位置、タイプ、及び/又は構造を光学的に検出するステップ(例えば、画像認識技術、分類技術、回帰技術、ルールに基づいた技術、パターンマッチング技術、他を用いて)を具えるが、追加であるいは代替的に、その他の適切な態様で、この位置、タイプ、及び/又は構造を決定するステップを具えていてもよい。
例えば、保持機構は、保持機構が人の手であってもよい。第1特定例では、着陸地点が下向きのカメラからの画像を用いて検出した開いた手である(図12参照)。第2特定例では、着陸地点が「つかむことができる」構造(例えば、図13に示すような)にある手である。第3特定例では、着陸地点が手招きゼスチュアをしている手である。
この変形例は、あらかじめ決められた構造タイプ(例えば、開いた手、「つかむことができる」手、他)の保持機構用の航空機システムのカメラ(例えば、航空機システムの上部、側部、及び/又は底に配置されている)で捕捉した画像などのセンサデータを周期的に分析する(例えば、視覚分析技術、画像分析技術、他を用いて)ステップと、あらかじめ決められた構造タイプを表すパラメータの検出に応じて着陸地点として保持機構を認識するステップとを具える。
第1例では、この方法は、赤外線画像セットをサンプリングするステップと、閾値を超える赤外線の特徴を有する画像内の領域を認識するステップと、認識した領域が手であることを決定する(例えば、パターンマッチング、決定論的方法、分類、回帰、確率論、他を用いて)ステップとを具える。例えば、その領域の周囲が、手の基準パターンにほぼ一致する場合、認識した領域が手であるとすることができる。第2例では、この方法は、視界画像セットをサンプリングするステップと、画像の前景から背景をセグメント化するステップと、前景領域が手であることを決定するステップと(例えば、上述した方法を用いて)、を具える。しかしながら、人の手はその他の方法で認識することができる。
この変形例は、選択的に、画像(例えば、下向きのカメラによって記録された)からユーザの手を認識するステップと、その手が航空機システムに関連している特定のユーザの手であるとの認識に応じてその手を着陸地点として認識する(例えば、分類技術、回帰技術、指紋などの生体認証データ、他を用いて)ステップとを具える。例えば、抽出した生体認証データは、航空機システムに、ユーザのデバイスに、あるいは遠隔データベースに保存することができるバイオメトリクスと比較することができる。ここで、ユーザは、その生体認証データが閾値パーセンテージを超えて合致しない場合、拒絶されることがあり、生体認証データが閾値パーセンテージを超えて合致している場合は受領される。この実施例は、選択的に、検出した手が、航空機システムに関連するユーザに関連しない場合、手から受け取った指令を無視する(例えば、その手を非着陸地点と認識する)ステップを具えていてもよい。
第2変形例では、着陸地点が、航空機システムの近位側にあるほぼ平坦な面(例えば、重力ベクトルに垂直)である(例えば、上向きのカメラ又は下向きのカメラで記録された画像の視覚的及び/又は画像処理に基づいて認識する、着陸地点近傍のビーコンで認識する、ユーザのデバイスから受信した指示によって特定する)。第3変形例では、着陸地点はあらかじめ決められた構造ドッキング地点(例えば、光学パターン、ビーコン信号、あらかじめ決められた地理的位置、又はその他の方法で認識したホームベース)である。しかしながら。着陸地点は、その他の適切な着陸地点であってもよく、その他の方法で決めるようにしてもよい。
第2実施例では、着陸指示が、時間及び/又は期間を具えている。例えば、着陸指示は、着陸する時間、所望の飛行期間(例えば、飛行事象検出時間から、安定化時間から、着陸指示受信時間から測定する、他)、及び/又はその他の適切なタイミング情報を具えていてもよい。
追加であるいは代替的に、制御指示は、飛行指示(例えば、速度、高度、向き、飛行パターン、目的地、衝突回避基準、他)、センサ指示(例えば、ビデオストリーミングの開始、ズームカメラ、他)、及び/又はその他の適切な指示を具えていてもよい。
制御指示によって航空機システムを操作するステップS140は、制御指示を実行するように機能する。ステップS140は、好ましくは、制御指示を受信するステップS130に応じて自動的に実行されるが、追加であるいは代替的に、制御指示を受信するステップS130の後の適切な時間に実行するようにしてもよい。処理システムは、好ましくは、制御指示に基づいてリフト機構及び/又はその他の航空機システムモジュールを操作するが、追加であるいは代替的に、その他の適切なシステムがこの航空機システムを操作することができる。第1変形例では、制御指示は、自動飛行指示に優先している。第2変形例では、制御指示が、自動飛行指示によって増えている(例えば、プロセッサがセンサデータに基づいて決められた自動飛行指示と、受信した制御指示に基づいた飛行指示の第3のセットを生成する)。第3変形例では、制御指示は、あらかじめ決められた飛行状態に達した後に実行される。第3変形例の一例では、制御指示は、航空機システムが安定化した後に実行される(例えば、横移動がほぼ止やまってから及び/又はホバリングしているとき)。しかしながら、制御指示は、適切な態様で適切な時点で実行することができる。ステップS140を実行した後、航空機システムは以前のモードで操作を再開する(例えば、ホバリングモードなど、ステップS140を実行する直前の操作モード)、別の飛行モードで操作を開始する、スタンバイモードに入る、及び/又はその他の適切なモードで操作することができる。
第1変形例では、制御指示が飛行指示を具え、ステップS140は、この飛行指示によって操作するステップを具える。例えば、高度を上げてカメラを左にパンするコマンドの受信に応じて、ステップS140は、リフト機構をこの指示に従うように自動的に操作し、次いで、新しい位置で航空機システムのホバリングを開始するステップを具える。第2例では、ロータの速度を上げるコマンドの受信に応じて、ステップS140はロータの速度を上げるステップを具える。
第2実施例では、制御指示が着陸地点を含む着陸指示であり、ステップS140は、その着陸地点までの飛行経路を生成するステップと、生成した飛行経路に従うリフト機構の操作指示を生成するステップと、これらの指示を実行するステップとを具える。これは、リフト機構を自動的に着陸させるように機能する。飛行経路は、航空機システムと着陸地点との間に介在する物理的体積(例えば、前向きのカメラ又は下向きのカメラによって記録された画像の視覚的処理又は画像処理に基づいて決まる)を生成することができ、あらかじめ決められた飛行経路であっても、あるいはその他の方法で決定することができる。一例では、飛行距離及び/又はリフト機構の操作指示を決定するステップは、航空機システムと着陸地点間の距離を決定する(例えば、LIDAR、視野内の基準物体または基準地点の相対的大きさに基づいて、他)ステップと、瞬間ロータ速度と、スタンバイ時ロータ速度と、距離とに基づいて、ロータのスプールダウン率を決定するステップと、を具える。第2例では、飛行経路及び/又はリフト機構の操作指示を決定するステップは、着陸地点をトラッキングする(着陸地点に向けて飛行進行をトラックする、移動している着陸地点の現在位置をトラックする、他)ステップと、航空機システムを着陸地点に着陸させるように自動的に制御するステップと、を具える。しかしながら、リフト機構操作指示はその他の方法で生成することができる。
第1特定例では、着陸地点が開いた手であり、ステップ140は、開いた手を検出するステップに応じて、航空機システムをこの開いた手の上に着陸させる(例えば、リフト機構を、ロータ速度を落とすことによるなどで、航空機システムを開いた手の上にゆっくり下降させるように操作する)ように自動的に制御するステップを具える。第2特定例では、着陸地点が「つかむことができる」手であり、ステップS140は、この手を検出するステップ(手を検出した直後、手を検出した後のある時間に、スタンバイ事象S150を検出する、及び/又は、スタンバイモードS160において操作するステップの前に、他)に応じて、航空機システムをこの手に近接して飛行させる(例えば、手の届く距離内に、手に接触させて、1インチ、3インチ、あるいは1フィートなど、手からの閾値距離内に、他)ように自動的に制御するステップを具える。
スタンバイ事象を検出するステップS150は、航空機システムがスタンバイ手順を開始するべきことを表すように機能する。スタンバイ事象(例えば、飛行中断事象)は、好ましくは、航空機システムが飛行モード(例えば、ホバリングモード、着陸モード、他)で動作している間に検出されるが、追加で又は代替的に、航空機システムがその他の適切なモードで動作している間及び/又はその他の適切な時点で検出するようにしてもよい。スタンバイ事象は、好ましくは、処理システム(例えば、航空機システムの処理システム)によって検出されるが、代替的に、遠隔コンピュータシステム、ユーザデバイス、あるいはその他の適切なシステムによって自動的に検出するようにしてもよい。
スタンバイ事象を検出するステップS150は、好ましくは、つかみ表示(例えば、航空機システムが人の手などの保持機構によって捕捉された、あるいは獲得されたことの表示)及び/又は保持表示(例えば、航空機システムがユーザと長く接触していることの表示、航空機システムがドッキングステーションに入っている表示)を検出するステップを具え、追加で又は代替的に、着陸表示(例えば、航空機システムが着陸地点に着陸した、及び/又は着陸地点に支持されていることの表示)、近接表示(例えば、ユーザの近傍、着陸地点近傍、他)、及び/又はその他の適切なスタンバイ表示を検出するステップを具えていてもよい。スタンバイ事象は、好ましくは、センサで、より好ましくは、航空機システムに搭載したセンサ(例えば、慣性測定ユニット、カメラ、高度計、GPS、温度センサ、他)でサンプリングしたデータに基づいて、検出される。例えば、スタンバイ事象は、航空機システムの、方位(例えば、重力に対する方位、方位の変化、及び/又は変化率、他)、高度(例えば、高度の変化、及び/又は変化率、高度計の読みに基づいて決まる、画像処理に基づいて決まる、他)、温度(例えば、航空機システムの温度の上昇、航空機システムの領域間の温度差、他)、及び/又は、力(例えば、航空機システムの圧縮)の値、及び/又は、その他の変化に基づいて検出することができる。しかしながら、スタンバイ事象は、追加で又は代替的に、送信信号(例えば、ユーザデバイスのクライアントなど、遠隔制御からの)に基づいて検出することもできる。
スタンバイ事象は、分類、回帰、パターンマッチング、経験則、ニューラルネットワーク、及び/又は、その他の適切な技術を用いて検出できる。スタンバイ事象を検出するためのモニタリング及び分析データは、好ましくは、スタンバイ事象(例えば、つかみ事象、他)とその他の事象(例えば、風事象、衝突事象、他)を区別するステップを具える。例えば、この方法は、航空機システムのセンサデータをモニタリングしながら、飛行モードで操作するステップと、最初の異常事象を検出してそれを風事象(例えば、風に起因する飛行障害)として分類するステップと、ついで、第2の異常事象を検出してそれをつかみ事象として分類するステップを具える。
第1変形例では、スタンバイ事象を検出するステップS150が、空間センサ信号の予想外の変化を検出するステップを具える。空間センサ信号の予想外の変化は、ユーザが飛行中の又は空中の航空機システムをつかんだことを、あるいはその他の適切な事象を表す。空間センサ信号の予想外の変化は、別の空間センサ信号(例えば、空間信号からの以前の信号、別の空間センサからの以前のあるいは現在の信号、他)に対する変化、予想外の空間センサ信号(例えば、ターゲット又は所望の航空機システムの方位、速度、及び/又は、その他の空間パラメータに対応する、リフト機構制御に基づく、他)に対する変化、及び/又は、その他の適切な空間センサ信号の変化であってもよい。この変形例の第1実施例では、空間センサ信号の予想外の変化を検出するステップが、自動的に発生した及び/又は遠隔で受信した制御指示に基づいて決められた予想空間センサ信号と異なる空間センサ信号の変化(例えば、ジャイロスコープ信号の変化、加速度計の変化、IMUの変化、高度計の変化、他)を検出するステップを具える。この実施例の第1例では、センサ融合モデル(例えば、拡大したカルマンフィルタ、ニューラルネットワークモデル、回帰モデル、分類モデル、他)を用いて、センサ信号に基づいてスタンバイ事象を検出することができる。この変形例の第2実施例では、空間センサ信号の予想外の変化が、あらかじめ決められた閾値を超える空間センサ信号の変化(例えば、IMUの変化)を検出するステップを具える。空間センサ信号は、軸に沿った加速、軸に沿った速度、角度変化(例えば、ヨー、ピッチ、ロール、他)を表しており、あるいは、その他の適切な航空機システムの動き及び/又は位置を表す。この実施例の第1例(図11に示す)では、航空機システムのピッチが、変化の閾値レート、あるいは閾値角度変化(例えば、加速度計及び/又はジャイロスコープ信号から決定される)を超えたときに、方位センサ信号の予想外の変化が検出されている。この実施例の第2例では、あらかじめ決められた閾値を下回る第1の空間センサ信号の予想外の変化は、スタンバイ事象としては認識されないが、むしろ風摂動事象として認識され、リフト機構がこの風摂動を補正するように制御される。この第2例では、第2の空間センサ信号の予想外の変化が、あらかじめ決められた閾値を超えており、スタンバイ事象として認識される。この実施例の第3例では、あらかじめ決められた閾値を超える空間センサ信号の予想外の変化と、補助信号(例えば、周囲環境温度を閾値分超える温度、閾値力を超える航空機システムの本体に係る圧縮力、他)との組み合わせに基づいてステップS150でスタンバイ事象が検出される。この実施例の第4例では、空間センサ信号の変化のパターンがスタンバイ事象に関連してあらかじめ決められたパターンとほぼ合致する場合、及び/又は、その他の飛行事象(例えば、風摂動)に関連するあらかじめ決められたパターンにほぼ合致しない場合に、スタンバイ事象がステップS150で検出される。しかしながら、スタンバイ事象は、その他の方法で検出してもよい。
第2変形例では、スタンバイ事象を検出するステップS150が、航空機システムが、重力ベクトル及び/又は予想方位ベクトルから(例えば、水平から及び/又は予想航空機システム方位から、35°、45°、60°傾いた)、あらかじめ決められた時間(例えば、100ms、350ms、1s、2s、他)閾値角度範囲内に残っていることを検出するステップを具える。例えば、スタンバイ事象は、航空機システム(例えば、航空機システムの主平面)が水平から及び/又は目的の航空機方位から、1秒間以上、45°以上傾いた場合に検出される。しかしながら、スタンバイ事象はその他の方法で検出してもよい。
第3変形例では、スタンバイ事象を検出するステップS150が、ユーザ及び/又は航空機システムへの保持機構の近接(例えば、空中の航空機システムをユーザがつかんだことを表す、他)を検出するステップを具える。ユーザ及び/又は保持機構の近接は、航空機システムの近接センサ、タッチセンサ、温度センサ(例えば、温度の上昇)、通信モジュール(例えば、航空機システムとユーザデバイス間に短距離接続が確立されたとき)、スイッチ、を用いて検出する、あるいはその他の方法で検出できる。例えば、ステップS150は、ハウジングに機械的に接続されているスイッチの駆動を検出するステップを具えていてもよい。このスイッチは、ボタン(例えば、ハウジング表面の上部又は底、ハウジング周辺近傍、あるいは航空機システムが人の手に保持されている場合は指先の下といった、保持機構に都合よく配置したボタン)、保持機構の導電素子によって電気的に接続することができる本体外側の電気的接点、及び/又は、その他の適切なスイッチであってもよい。
第4変形例では、スタンバイ事象を検出するステップS150が、遠隔制御(例えば、ユーザのデバイス)から指示(例えば、スタンバイ指示)を受信するステップを具える。しかしながら、スタンバイ事象は、その他の適切な態様で、ステップS150で検出することができる。
スタンバイモードにおいて航空機システムを操作するステップS160は、航空機システムの飛行制御を一時停止するように機能する。航空機システムは好ましくは、スタンバイ事象を検出するステップS150に応じて自動的にスタンバイモードS160で操作される(例えば、スタンバイ事象を検出するステップS150の直後、スタンバイ事象を検出するステップS150の後あらかじめ決められた時間に、スタンバイ事象を検出するステップS150と追加の基準を満たした後、他)。ステップS160は、好ましくは航空機システムのプロセッサによって実行されるが、追加で又は代替的に、その他の航空機システム機器、遠隔コンピュータシステム、ユーザデバイス、及び/又は、その他の適切なデバイスによって実行するようにしてもよい。
ステップS160は、好ましくはリフト機構によって発生した空気力学的力を航空機システムの飛行に必要な力より小さい力に低減する(例えば、ゼロの力に、必要な力の1%、5%、10%、50%、75%、1−10%、5−25%、他といった一部に低減する、必要な力の少し下に低減する、他)。リフト機構がロータセットを具えている変形例では、ロータを止める、あるいは出力を上げる(例えば、ゼロ又は最小角速度で回転するよう制御する、ロータを駆動するモータによりゼロ又は最小出力を提供する、他)、飛行モードにある場合より遅い角速度で回転させる(例えば、1%、5%、10%、50%、75%、1−10%、5−25%、他といった、飛行モードの角速度の一部、又は飛行に必要な最小角速度)、他の方法で協調的に飛行モードの時より小さい空気力学的力を発生する(例えば、ロータのブレード角を減らす)、及び/又は、その他の方法で制御するステップを具える。例えば、ロータセットの各ロータを、協調的に飛行モードの空気力学的力より小さい空気力学的力を発生するように操作するステップは、各ロータに提供される出力を航空機システムの飛行に必要な出力閾値より小さくなる(例えば、1%、5%、10%、50%、75%、1−10%、5−25%、他といった、必要な出力の一部)ように低減するステップを具える。更にあるいは代替的に、リフト機構によって発生した空気力学的力は、低減されるが航空機システムの飛行に必要な力を下回らないように、低減しないまま、あるいは、その他の適切なやり方で変更することができる。
リフト機構以外の航空機システムの機器は、好ましくはスタンバイモードで稼働を続けるが、代替的にスイッチを切る(例えば、出力しない)、スタンバイ状態で稼働する、あるいはその他の方法で稼動していてもよい。例えば、センサとプロセッサは、航空機システムの動作パラメータを検出し分析を続け、及び/又は、航空機システムの動作状態(空間状態、飛行状態、出力状態、他)を測定し、通信システムは、航空機システムからの(例えば、ユーザデバイス、遠隔コンピュータシステム、他へ)データ(例えば、ビデオストリーム、センサデータ、航空機システムの状態、他)の送信を続けることができる。航空機システムの状態を検出し分析し続けることによって、システムは、スタンバイモードS160で稼働しながら、飛行事象S110を検出することができる。例えば、これによって、航空機システムがつかまれて保持されている(例えば、及びそれに応じてスタンバイモードに入った)後に解放されたとき、この方法の反復(例えば、飛行事象に再度エンターする、他)が可能となる。さらに、このことで、事象がスタンバイ事象として不正に認識された場合、飛行モードの回復が可能である。特定例では、風又は物体との衝突が、つかみ事象として間違って認識された特定例では、航空機システムはスタンバイモードに入り、自然落下を開始できる(航空機システムは実際には保持機構によって支持されていないので)。この特定例では、この自然落下を検出して、航空機システムは自然落下の検出に応じて飛行モードS120の操作を再開できる。代替的に、スタンバイモードS160における航空機システムを操作するステップは、その他の航空機システム機器のいずれかあるいはすべての電力消費を切る及び/又は低減するステップ、航空機システム機器を適切な態様で適切な電力消費レベルで稼働させるステップ、及び/又はステップS160をその他の適切な態様で実行するステップを具えていてもよい。
簡潔にするために割愛したが、好ましい実施例は、様々なシステム機器と様々な方法手順の各組み合わせ及び変更を含むものであり、今方法手順は適切な順番で、順次、あるいは同時に実行できる。
当業者は、上述した詳細な説明、図面及び特許請求の範囲から、以下に述べる特許請求の範囲に規定した本発明の範囲から外れることなく、本発明の好ましい実施例に変形及び変更を行い得ることを認識するであろう。
Claims (23)
- ロータを具える航空機システムの制御方法において:
前記ロータを飛行モードで操作するステップであって、当該ロータが前記航空機システムのハウジングによって囲まれており、ロータ軸を中心に回転するように構成されているステップと;
前記ロータを飛行モードで操作しながら、前記航空機システムがつかまれていることを表すつかみ事象を検出するステップと;
前記航空機システムのハウジングに搭載されたプロセッサにおいて、前記つかみ事象の検出に応じて、前記ロータを自動的にスタンバイモードで操作するステップと;
を具えることを特徴とする方法。 - 請求項1に記載の方法がさらに、航空機システムの自然落下を表すスタート事象を検出するステップを具え、前記飛行モードがホバリングモードであり、前記ロータをホバリングモードで操作するステップが、スタート事象の検出に応じて自動的に行われることを特徴とする方法。
- 請求項2に記載の方法がさらに、前記ロータをホバリングモードで操作しながら、前記ハウジングに搭載したカメラで画像を捕捉するステップを具えることを特徴とする方法。
- 請求項1に記載の方法が更に:
前記ロータを飛行モードで操作しながら、選択的に、保持機構を検出するステップと;
前記プロセッサにおいて、前記保持機構を検出するステップに応じて、前記つかみ事象を検出する前に、前記航空機システムを前記保持機構に近接して飛行させるように自動的に制御するステップと;
を具えることを特徴とする方法。 - 請求項1に記載の方法において、前記つかみ事象が、前記ハウジングに搭載したセンサからの測定に基づいて検出されることを特徴とする方法。
- 請求項5に記載の方法において、
前記センサが慣性測定ユニットを具えており;
前記つかみ事象が、方位変更の閾値より大きい前記航空機システムの方位変更を具え、前記方位変更が前記慣性測定ユニットによってサンプリングされる;
ことを特徴とする方法。 - 請求項6に記載の方法において、前記方位変更閾値が35°であることを特徴とする方法。
- 請求項5に記載の方法において、前記ロータをスタンバイモードで操作するステップが、ロータの回転を止めるステップを具えることを特徴とする方法。
- 請求項8に記載の方法が更に:
前記ロータをスタンバイモードで操作するステップの後に、前記ロータを第2飛行モードで操作するステップと;
前記ロータを第2飛行モードで操作する間に、前記ハウジングに機械的に取り付けたスイッチの作動を検出するステップと;
前記作動の検出に応じて、前記ロータを第2スタンバイモードで操作するステップと;
を具えることを特徴とする方法。 - 請求項5に記載の方法において、前記つかみ事象を検出するステップが、前記測定に基づいて、前記つかみ事象を前記航空機システムがつかまれていることを表すものとして分類するステップを具えることを特徴とする方法。
- 請求項1に記載の方法において、前記ロータが掃引領域を規定しており、前記航空機システムが保持領域を規定しており、前記ロータ軸に垂直な前記ロータ面への保持領域の投影が、前記ロータ面への前記掃引領域の投影の大部分と重なる、ことを特徴とする方法。
- 航空機システムの側方面に垂直に伸びる中央軸を具える航空機システムを制御する方法において:
前記航空機システムのロータセットを用いて第1空気力学的力を発生するステップであって、前記ロータセットの各ロータが前記航空機システムのハウジングによって囲まれており、前記第1空気力学的力が、前記航空機システムによって発生した総空気力学的力とほぼ等しい、第1空気力学的力を発生するステップと;
前記第1空気力学的力を発生した後、前記航空機システムにおいて、前記中央軸と重力ベクトルの間の鋭角が35°より大きいことを検出するステップと;
前記鋭角が35°より大きいことを検出するステップに応じて、前記ロータセットの各ロータを、前記ロータセットによる第1空気力学的力より小さい第2空気力学的力を共働して発生するように操作するステップと;
を具えることを特徴とする方法。 - 請求項12に記載の方法において、前記ロータセットの各ロータを共働して第2空気力学的力を発生するように操作するステップが、前記ロータセットに提供する動力を、航空機システムの飛行に必要な動力閾値より小さくなるよう低減するステップを具えることを特徴とする方法。
- 請求項12に記載の方法がさらに、前記航空機システムにおいて、航空機システムの自然落下を表すスタート事象を検出するステップを具え、前記第1空気力学的力を発生するステップが、前記スタート事象の検出に応じて自動的に行われることを特徴とする方法。
- 請求項14に記載の方法において、前記スタート事象を検出するステップが、前記ハウジングに機械的に取り付けた加速度計においてほぼゼロに等しい大きさの適切な加速度を検出するステップを具えることを特徴とする方法。
- 請求項12に記載の方法がさらに、前記航空機システムにおいて:
前記第1空気力学的力を発生した後、選択的に保持機構を検出するステップと;
前記保持機構の検出に応じて、前記鋭角が35°より大きいことを検出するステップの前に、前記航空機システムを前記保持機構に近接して飛行するように自動的に制御するステップと;
を具えることを特徴とする方法。 - 請求項16に記載の方法において、前記保持機構が人の手であることを特徴とする方法。
- 請求項12に記載の方法において、前記ロータセットの各ロータの直径の2乗の和が、前記側方面への前記航空機システム投影の凸包の面積の50%より大きいことを特徴とする方法。
- 請求項18に記載の方法において、前記航空機システムが、保持領域を具え、前記外側面への前記ロータセットの総掃引領域の投影が、前記保持領域の前記外側面への投影と重なることを特徴とする方法。
- 請求項12に記載の方法において、前記ハウジングが、各ロータを周囲環境に流体連通する複数の空気流開口を具え、各開口が閾値サイズより小さいことを特徴とする方法。
- 請求項12に記載の方法がさらに、前記航空機システムにおいて、航空機システムサポートが閾値時間インターバルより長い時間インターバルを通してほぼ水平方位にあることを表すスタート事象を検出するステップを具え、前記第1空気力学的力の発生が、このスタート事象の検出に応じて自動的に行われることを特徴とする方法。
- ロータを具える航空機システムの制御方法において:
航空機システムサポートが閾値時間インターバルより大きい時間インターバルの間ほぼ水平方位にあることを表すスタート事象を検出するステップと;
前記航空機システムのハウジングに搭載したプロセッサにおいて、前記スタート事象を検出するステップに応じて、前記ロータを自動的に飛行モードで操作するステップであって、前記ロータが前記航空機システムのハウジングに囲まれており、ロータ軸を中心に回転するように構成されている;
ことを特徴とする方法。 - 請求項22に記載の方法がさらに:
前記ロータを飛行モードで操作する間に、前記航空機システムがつかまれていることを表すつかみ事象を検出するステップと;
前記プロセッサにおいて、前記つかみ事象の検出に応じて、前記ロータを自動的にスタンバイモードで操作するステップと;
を具えることを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662326600P | 2016-04-22 | 2016-04-22 | |
| US201662353337P | 2016-06-22 | 2016-06-22 | |
| PCT/IB2016/001699 WO2017115120A1 (en) | 2015-12-29 | 2016-11-11 | System and method for automated aerial system operation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019505902A true JP2019505902A (ja) | 2019-02-28 |
Family
ID=59224683
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018534095A Pending JP2019505902A (ja) | 2016-04-22 | 2016-11-11 | 自動航空機システム操作用システム及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3398021A4 (ja) |
| JP (1) | JP2019505902A (ja) |
| KR (1) | KR102220394B1 (ja) |
| WO (1) | WO2017115120A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019168079A1 (ja) * | 2018-02-28 | 2020-08-06 | 株式会社ナイルワークス | 安全性を向上した農業用ドローン |
| JP2020205505A (ja) * | 2019-06-14 | 2020-12-24 | Hapsモバイル株式会社 | アンテナ制御装置、プログラム、システム、及び制御方法 |
| JP2022093201A (ja) * | 2020-12-11 | 2022-06-23 | 合同会社酒井総合研究所 | 飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法 |
| JP2022106252A (ja) * | 2021-01-06 | 2022-07-19 | 合同会社酒井総合研究所 | 飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109562830A (zh) * | 2016-07-29 | 2019-04-02 | 索尼互动娱乐股份有限公司 | 无人飞行物体和控制无人飞行物体的方法 |
| JP2019057185A (ja) * | 2017-09-22 | 2019-04-11 | カシオ計算機株式会社 | 飛行装置、飛行方法及びプログラム |
| US11072434B2 (en) | 2018-04-24 | 2021-07-27 | Textron Innovations Inc. | Method and system for controlling rotor speeds of rotor systems |
| CN111824406A (zh) * | 2020-07-17 | 2020-10-27 | 南昌航空大学 | 一种基于机器视觉的公共安全自主巡查四旋翼无人机 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006112578A1 (en) * | 2005-04-20 | 2006-10-26 | Won-Sup Oh | Vertical take-off and landing aircraft |
| CN104679013A (zh) * | 2015-03-10 | 2015-06-03 | 无锡桑尼安科技有限公司 | 无人机自动着陆系统 |
| WO2015085598A1 (en) * | 2013-12-13 | 2015-06-18 | SZ DJI Technology Co., Ltd. | Methods for launching and landing an unmanned aerial vehicle |
| CN105182986A (zh) * | 2015-08-10 | 2015-12-23 | 北京零零无限科技有限公司 | 一种手持回收和放飞无人机的方法及装置 |
| WO2016107529A1 (zh) * | 2015-01-04 | 2016-07-07 | 北京零零无限科技有限公司 | 一种全保护无人机 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101976078A (zh) * | 2010-09-29 | 2011-02-16 | 清华大学 | 基于激光指引的无人直升机自动着陆方法 |
| JP6344791B2 (ja) * | 2013-01-23 | 2018-06-20 | 国立大学法人 名古屋工業大学 | 陸上(および可能な場合は水上を)走行可能なプロテクトフレーム付き飛行体および自動充電装置 |
| US8907846B2 (en) * | 2013-02-05 | 2014-12-09 | King Fahd University Of Petroleum And Minerals | Single-antenna direction finding system for multi-rotor platforms |
| CN105116909A (zh) * | 2015-08-10 | 2015-12-02 | 北京零零无限科技有限公司 | 一种手持放飞无人机的方法、装置及无人机 |
| CN104991561B (zh) * | 2015-08-10 | 2019-02-01 | 北京零零无限科技有限公司 | 一种手持无人机回收的方法、装置及无人机 |
| CN204406209U (zh) * | 2015-03-10 | 2015-06-17 | 无锡桑尼安科技有限公司 | 无人机自动着陆系统 |
-
2016
- 2016-11-11 JP JP2018534095A patent/JP2019505902A/ja active Pending
- 2016-11-11 EP EP16881334.3A patent/EP3398021A4/en not_active Withdrawn
- 2016-11-11 WO PCT/IB2016/001699 patent/WO2017115120A1/en not_active Ceased
- 2016-11-11 KR KR1020187021868A patent/KR102220394B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006112578A1 (en) * | 2005-04-20 | 2006-10-26 | Won-Sup Oh | Vertical take-off and landing aircraft |
| WO2015085598A1 (en) * | 2013-12-13 | 2015-06-18 | SZ DJI Technology Co., Ltd. | Methods for launching and landing an unmanned aerial vehicle |
| WO2016107529A1 (zh) * | 2015-01-04 | 2016-07-07 | 北京零零无限科技有限公司 | 一种全保护无人机 |
| CN104679013A (zh) * | 2015-03-10 | 2015-06-03 | 无锡桑尼安科技有限公司 | 无人机自动着陆系统 |
| CN105182986A (zh) * | 2015-08-10 | 2015-12-23 | 北京零零无限科技有限公司 | 一种手持回收和放飞无人机的方法及装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019168079A1 (ja) * | 2018-02-28 | 2020-08-06 | 株式会社ナイルワークス | 安全性を向上した農業用ドローン |
| JP2020205505A (ja) * | 2019-06-14 | 2020-12-24 | Hapsモバイル株式会社 | アンテナ制御装置、プログラム、システム、及び制御方法 |
| JP7249890B2 (ja) | 2019-06-14 | 2023-03-31 | Hapsモバイル株式会社 | アンテナ制御装置、プログラム、システム、及び制御方法 |
| JP2022093201A (ja) * | 2020-12-11 | 2022-06-23 | 合同会社酒井総合研究所 | 飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法 |
| JP7665139B2 (ja) | 2020-12-11 | 2025-04-21 | 合同会社酒井総合研究所 | 飛行型ロボット |
| JP2022106252A (ja) * | 2021-01-06 | 2022-07-19 | 合同会社酒井総合研究所 | 飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法 |
| JP7622938B2 (ja) | 2021-01-06 | 2025-01-28 | 合同会社酒井総合研究所 | 飛行型ロボット |
| JP2025061078A (ja) * | 2021-01-06 | 2025-04-10 | 合同会社酒井総合研究所 | 飛行型ロボット、制御プログラムおよび制御方法 |
| JP7834389B2 (ja) | 2021-01-06 | 2026-03-24 | 合同会社酒井総合研究所 | 飛行型ロボット、制御プログラムおよび制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3398021A1 (en) | 2018-11-07 |
| KR20180103935A (ko) | 2018-09-19 |
| WO2017115120A1 (en) | 2017-07-06 |
| EP3398021A4 (en) | 2019-09-04 |
| KR102220394B1 (ko) | 2021-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10824149B2 (en) | System and method for automated aerial system operation | |
| KR102220394B1 (ko) | 자동 항공 시스템 동작을 위한 시스템 및 방법 | |
| US11340606B2 (en) | System and method for controller-free user drone interaction | |
| US10156854B2 (en) | UAV and UAV landing control device and method | |
| US11914370B2 (en) | System and method for providing easy-to-use release and auto-positioning for drone applications | |
| US20250045949A1 (en) | Uav control method, device and uav | |
| CN112000118B (zh) | 一种无人机保护方法、装置及无人机 | |
| CN106054903B (zh) | 一种多旋翼无人机自适应降落方法及系统 | |
| CN108369243B (zh) | 风估计系统、风估计方法以及程序 | |
| CN107438805B (zh) | 无人机控制方法及装置 | |
| KR102729635B1 (ko) | 비행 실시 전 진단 비행을 수행하는 무인 비행 장치 및 방법 | |
| KR101990981B1 (ko) | 구조 장비 투척 방법 및 이를 이용한 구조용 드론 | |
| WO2017024761A1 (zh) | 一种手持回收和放飞无人机的方法及装置 | |
| CN105259917A (zh) | 一种无人飞行器安全快速降落装置及方法 | |
| CN107608378A (zh) | 控制无人机起飞的方法及装置、存储介质及无人机 | |
| CN107807668A (zh) | 一种多旋翼无人机自动控制方法 | |
| CN205121348U (zh) | 无人飞行器安全快速降落系统及其遥控设备和无人飞行器 | |
| CN106647788B (zh) | 无人机飞行控制方法及装置 | |
| CN108128455A (zh) | 一种多旋翼无人机控制方法 | |
| JP7754513B2 (ja) | 無人飛行体、無人飛行体の制御システム及び無人飛行体の制御方法 | |
| Luxman et al. | Implementation of back-stepping integral controller for a gesture driven quad-copter with human detection and auto follow feature |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180823 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200331 |