JP2020003230A - レゾルバ - Google Patents
レゾルバ Download PDFInfo
- Publication number
- JP2020003230A JP2020003230A JP2018120170A JP2018120170A JP2020003230A JP 2020003230 A JP2020003230 A JP 2020003230A JP 2018120170 A JP2018120170 A JP 2018120170A JP 2018120170 A JP2018120170 A JP 2018120170A JP 2020003230 A JP2020003230 A JP 2020003230A
- Authority
- JP
- Japan
- Prior art keywords
- resolver
- coil
- rotor
- core
- stator core
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】レゾルバステータコア25と、回転軸線方向でレゾルバステータコア25と対向するレゾルバロータコア42と、レゾルバステータコア25に設けられたステータトランスコイル、及び励磁コイルと、レゾルバロータコア42に設けられたロータトランスコイル、及び検出コイルと、を備え、レゾルバステータコア25、及びレゾルバロータコア42の少なくともいずれか一方で、かつ少なくともステータトランスコイル、ロータトランスコイル、励磁コイル、及び検出コイルが配置されている箇所の一部に重なる領域に、レゾルバステータコア25、及びレゾルバロータコア42よりも電気抵抗が高く、渦電流の流れを阻害するスリット38,39が少なくとも1つ設けられている。
【選択図】図4
Description
また、前記抵抗部は、前記ロータコアの回転方向に沿うように、回転軸線方向からみて湾曲形成されていてもよい。
また、前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成された凹部であってもよい。
(ブラシレスモータ)
図1は、本発明に係るレゾルバ6が設けられたブラシレスモータ1の軸方向に沿う断面図である。
図1に示すように、ブラシレスモータ1は、略有底筒状のモータケース2と、モータケース2の開口部2aを閉塞する略円板状のブラケット3と、モータケース2内に収納されているモータステータ4と、モータステータ4に対して回転自在に設けられたモータロータ5と、モータロータ5の回転位置を検出するレゾルバ6と、を備えている。
なお、以下の説明では、モータロータ5の回転軸線方向を単に軸方向、モータロータ5の回転方向を周方向、軸方向及び周方向に直交するモータロータ5の径方向を単に径方向、と称する。
また、ブラケット3には、モータステータ4とは反対側の一面3aに、凹部3bが形成されている。この凹部3bに、レゾルバ6の一方を構成するレゾルバステータ21(図2参照)が固定されている。なお、レゾルバ6の詳細構造については、後述する。
モータロータコア14は、略円柱状に形成されている。モータロータコア14は、プレス加工によって略環状に打ち抜いた金属板(電磁鋼板)を軸方向に積層してなる。しかしながら、モータロータコア14を、軟磁性粉を加圧成形して形成することも可能である。
また、モータロータコア14の径方向略中央には、軸方向に貫通する貫通孔14aが形成されている。この貫通孔14aに、回転軸13が、例えば圧入等により固定されている。
図2は、図1のA部拡大図である。なお、図2以降では、説明を分かりやすくするために、各部の縮尺を適宜変更して示している。
図2に示すように、レゾルバ6は、いわゆるシートコイル型レゾルバである。レゾルバ6は、ブラケット3に固定されている略円板状のレゾルバステータ21と、レゾルバステータ21のブラケット3とは反対側に所定間隔をあけて配置され、レゾルバステータ21と軸方向で対向する略円板状のレゾルバロータ22と、を備えている。
レゾルバステータ21は、略円板状に形成されたレゾルバステータ部23を有している。このレゾルバステータ部23が、ブラケット3の凹部3bに接するように配置される。そして、ブラケット3に、レゾルバステータ21が固定されている。
レゾルバステータ部23の径方向略中央には、ブラケット3とは反対側に向かって円筒部24が突出形成されている。円筒部24の内径は、回転軸13の軸径よりも大きく設定されている。このような円筒部24を介し、レゾルバステータ21からレゾルバロータ22側に回転軸13の他端13bが突出されている。
レゾルバステータコア25は磁性材料から成り、凹部23bの形状に対応するように、軸方向からみて略円環状に形成されている。すなわち、レゾルバステータコア25の径方向略中央には、円筒部24を挿通可能な開口部25aが形成されている。レゾルバステータコア25は、後述の励磁コイル29による交番磁束の形成効率を高めるためのものである。
図3は、励磁コイル29の形成パターンを図2における矢印Y方向からみた平面図であって、(a)は、第2絶縁シート27におけるレゾルバロータ22側の表面27bを示し、(b)は、第2絶縁シート27における第1絶縁シート26側の裏面27c示している。なお、図3(b)において、レゾルバロータ22側から第2絶縁シート27をみると、本来裏面27c側は視認できないが、ここでは、第2絶縁シート27を透過してみているものとする。以下の図6で示す第3絶縁シート43、変形例の図16、図17で示す第2絶縁シート27、第3絶縁シート43も同様である。
ステータトランスコイル30は、第2絶縁シート27の開口部27aの周囲を取り囲むように、渦巻き状に形成されている。ステータトランスコイル30の両端末部30a,30bは、リード線等を介して制御部(いずれも不図示)に電気的に接続されている。
2つの渦巻きコイル33,34のうちの一方の渦巻きコイル33は、大きい略半円状のループの内側に小さい略半円状のループが形成されるように、かつ内側のループほど円周角が小さくなるように形成されている。2つの渦巻きコイル33,34のうちの他方の渦巻きコイル34は、回転軸13の回転軸線を通る径方向の任意の直線に対し、一方の渦巻きコイル33と線対称や点対称(2回回転対称)に形成されている。なお、レゾルバ6の軸倍角をN(Nは2以上の整数)とすると、2N回転対称に形成するとよい。
cos励磁コイル32は、sin励磁コイル31と基本的構成が同一である。cos励磁コイル31は、軸方向からみてsin励磁コイル31と重なるように配置されている。但し、cos励磁コイル32は、sin励磁コイル31に対し、軸方向からみて機械角で90°ずれて配置されている。なお、本第1実施形態は軸倍角1のレゾルバ6であるが、軸倍角Nのレゾルバの場合、90°/Nずれた位置に配置する。
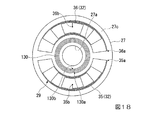
図4は、レゾルバステータコア25を軸方向からみた平面図である。
図4に示すように、レゾルバステータコア25には、開口部25aの周縁から径方向に沿って、かつ径方向外側に向かって延びる複数(例えば、本第1実施形態では9つ)の内スリット38が形成されている。また、レゾルバステータコア25には、外周縁25cから径方向に沿って、かつ径方向内側に向かって延びる複数(例えば、本第1実施形態では9つ)の外スリット39が形成されている。内スリット38及び外スリット39は、周方向に等間隔で、交互に配置されている。
図5に示すように、レゾルバステータコア25は、内周部側がステータトランスコイル30の軸方向の投影上となるように、かつ外周部側がsin励磁コイル31(cos励磁コイル32)の軸方向の投影上となるように略円環状に形成されている。ここで、レゾルバステータコア25に形成されている内スリット38及び外スリット39は、ステータトランスコイル30、sin励磁コイル31、及びcos励磁コイル32を径方向に跨るように延在されている。
図2に戻り、レゾルバロータ22は、略円板状に形成されたレゾルバロータ部41を有している。レゾルバロータ部41の径方向略中央には、厚さ方向に貫通する貫通孔41aが形成されている。この貫通孔41aに、回転軸13の他端13b側が圧入等により固定されている。これにより、回転軸13とレゾルバロータ22とが一体となって回転する。
レゾルバロータコア42は磁性材料により形成されており、基本的構成は前述のレゾルバステータコア25(図4参照)と同一である。このため以下では、レゾルバロータコア42の構成について、レゾルバステータコア25と同一符号で説明し、レゾルバロータコア42の詳細についての説明を省略する。
第3絶縁シート43のレゾルバステータ21側の表面43bには、第3絶縁シート43に成膜処理等を施すことにより、ロータトランスコイル44、及び検出コイル45が形成されている。第3絶縁シート43は、ロータトランスコイル44、及び検出コイル45と、レゾルバロータコア42との絶縁を確保するためのものである。
図6に示すように、ロータトランスコイル44は、第3絶縁シート43の開口部43aの周囲を取り囲むように、渦巻き状に形成されている。また、検出コイル45は、ロータトランスコイル44の周囲を取り囲むように形成されている。検出コイル45は、2極で構成されている。すなわち、検出コイル45は、励磁コイル29の形状に対応するように、軸方向からみて略半円状の2つの渦巻きコイル46,47からなる。より具体的には、2つの渦巻きコイル46,47は、各励磁コイル31,32の最外側のループ形状とほぼ同じ大きさの略半円状に形成されている。また、2つの渦巻きコイル46,47は、回転軸13の回転軸線を通る径方向の任意の直線を中心として、線対称に形成されている。
すなわち、2つの渦巻きコイル46,47の各端末部46a,46b,47a,47bを、それぞれ径方向外側に位置する外側端末部46a,47aと径方向内側に位置する内側端末部46b,47bとしたとき、一方の渦巻きコイル46の内側端末部46bと他方の渦巻きコイル47の内側端末部47bとが接続されている。
また、ロータトランスコイル44の両端末部44a,44bのうちの径方向内側の端末部44bは、一方の渦巻きコイル46の外側端末部46aに接続されている。すなわち、ロータトランスコイル44、及び検出コイル45は、1つの閉回路とされている。
次に、レゾルバ6の作用について説明する。
レゾルバ6の励磁コイル29(sin励磁コイル31、cos励磁コイル32)には、不図示の外部電源、制御部を介して予め励磁信号が入力されている。励磁コイル29に励磁信号を入力することにより、励磁コイル29に電流が生じ、それに伴ってレゾルバステータ21に交番磁束が発生する。具体的には、位相のずれた2つの励磁コイル31,32(sin励磁コイル31、cos励磁コイル32)により、レゾルバステータ21には、位相のずれた2つの交番磁束が発生する。これら交番磁束により、レゾルバロータ22の検出コイル45に誘起電圧が生じ、検出コイル45に交番電流が流れる。この交番電流は、2つの励磁コイル31,32により発生した2つの交番磁束を合成した形で生成される。
モータロータ5が回転することにより、レゾルバステータ21に対してレゾルバロータ22が回転する。レゾルバロータ22が回転すると、レゾルバステータ21に対するレゾルバロータ22の位置が変化すると、励磁コイル29に入力する高周波の入力信号に対して検出コイル45から各トランスコイル30,44を介して出力される出力信号は回転位置に応じた位相差を持つ。この位相差を不図示の制御部によって検出し、モータロータ5の回転位置が検出される。
ここで、図7に示すように、各コイル31,32,44,45に交番電流が流れると、交番磁束を発生するとともに、レゾルバステータコア25やレゾルバロータコア42に渦電流Uが発生しようとする。渦電流Uは、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所及びその周囲全ての位置に面方向に沿って渦状に発生し、特にコイルの近傍に強く生じる。すなわち、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所及びその周囲全ての箇所、特にコイルの近傍が、渦電流Uの発生領域Rである。換言すれば、発生領域Rは、レゾルバステータコア25やレゾルバロータコア42の各コイル31,32,44,45が配置されている箇所の一部に重なる領域である。渦電流Uは、各コイル31,32,44,45に流れる交番電流を妨げる向きに磁束を生じるため、効率よく交番磁束を形成するのを阻害してしまう。
また、内スリット38、及び外スリット39を、レゾルバステータコア25、及びレゾルバロータコア42における渦電流Uの流れの抵抗としている。このように、簡素な構造で渦電流Uの流れを阻害できるので、レゾルバ6の製造コストを低減できる。
なお、上述の第1実施形態では、レゾルバステータコア25、及びレゾルバロータコア42に形成された内スリット38及び外スリット39を、周方向に等間隔で配置した場合について説明した。しかしながら、これに限られるものではなく、内スリット38及び外スリット39を等間隔に配置しなくてもよい。
また、上述の第1実施形態では、各スリット38,42の個数がそれぞれ9つである場合について説明した。しかしながら、これに限られるものではなく、各スリット38,42の個数は、任意に設定することが可能である。
このように、スリット53と縦スリット54とを組み合わせることにより、渦電流Uの流れる経路を効果的に寸断することができ、渦電流Uを小さくすることができる。
図11に示すように、スリット53と縦スリット54とを組み合わせることにより、レゾルバステータコア25上の渦電流U(図7参照)の発生領域Rで渦電流Uの流れを阻害することができる。より効果的に渦電流Uの流れを阻害するために、略円環状のスリット53は、各コイル30,31の一部と重なるように配置されている。レゾルバロータコア42についても、同様の効果を奏する。
図6に示すように、検出コイル45は、2極で構成されている。すなわち、検出コイル45は、軸方向からみて略半円状の2つの渦巻きコイル46,47からなる。これら2つの渦巻きコイル46,47の周方向中央が、レゾルバロータコア42(検出コイル45)の磁極中心Cとなる。
次に、図14に基づいて、本発明の第2実施形態について説明する。なお、第1実施形態と同一態様には、同一符号を付して説明を省略する。
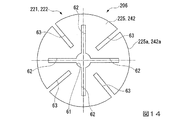
図14は、第2実施形態におけるレゾルバステータコア225、及びレゾルバロータコア242を軸方向からみた平面図である。
第2実施形態において、ブラシレスモータ1の基本的構成は、前述の第1実施形態と同様である。また、レゾルバ206の基本的構成も前述の第1実施形態と同様である。
このため、特に図示は省略するが、レゾルバロータ222は、回転軸13の他端13bに固定される。また、レゾルバステータ221は、前述の第1実施形態におけるレゾルバステータ21の位置とは反対側に配置される。すなわち、レゾルバステータ221は、レゾルバロータ222のモータステータ4とは反対側に配置される。そして、レゾルバステータ221は、ブラシレスモータ1に別途設けられるカバー等(不図示)に取り付けられる。
なお、上述の第2実施形態では、レゾルバステータコア225、及びレゾルバロータコア242に形成された内スリット62及び外スリット63を、周方向に等間隔で配置した場合について説明した。しかしながら、これに限られるものではなく、内スリット62及び外スリット63を等間隔に配置しなくてもよい。
また、上述の第1実施形態では、各スリット62,63の個数がそれぞれ4つである場合について説明した。しかしながら、これに限られるものではなく、各スリット62,63の個数は、任意に設定することが可能である。
このように、スリット66と縦スリット67とを組み合わせることにより、渦電流Uの流れる経路を効果的に寸断することができ、渦電流Uを小さくすることができる。この結果、スリット66のスリット幅を大きくすることが可能になる。
なお、各コア225,242の磁気的な抵抗を増やさないためには、各スリット66,67を設けることで減少する各コア225,242の面積を最小限にすべきであり、スリットの幅は狭い方が望ましい。例えば、各コア225,242が薄板鋼板材であれば、板厚の0.5倍からから板厚の1.5倍とするのが望ましい。
例えば、上述の実施形態では、レゾルバ6,206は、ブラシレスモータ1に設けられ、モータロータ5の回転位置を検出するために用いられる場合について説明した。しかしながら、これに限られるものではなく、さまざまな回転電機に、レゾルバ6,206を用いることが可能である。
また、レゾルバステータコア25,225、及びレゾルバロータコア42,242の渦電流Uの発生領域Rであれば、抵抗となる形状は、如何なる形状でもよい。軸方向からみてU字状やV字状等、さまざまな形状を採用できる。
少なくともレゾルバステータコア25,225の励磁コイル29が形成されている箇所に、渦電流Uの流れを阻害する抵抗があれば、レゾルバステータコア25,225、及びレゾルバロータコア42,242のいずれかに各種スリット38,39,51〜54,62〜67や貫通孔61が形成されていても、形成されていなくてもよい。
このように構成することで、ステータトランスコイル30,130とロータトランスコイル44との間の電磁誘導を、より促進させることができる。この結果、レゾルバ6によるモータロータ5の回転位置の検出精度を、さらに向上できる。
また、各コイル29,45の形成方法は、絶縁シート27,43上に形成した銅箔シートからエッチングで形成する他、絶縁シート27,43状に銅や銀を直接印刷してパターン形成する方法や、電線でコイル状に形成する方法であってもよい。
Claims (5)
- ステータコアと、
前記ステータコアに対して回転可能に設けられ、回転軸線方向で前記ステータコアと対向するロータコアと、
前記ステータコアに設けられた第1トランスコイルと、
前記ロータコアに設けられ、前記第1トランスコイルと対向する第2トランスコイルと、
前記ステータコアに設けられ前記第1トランスコイルと同心円上に設けられた励磁コイルと、
前記ロータコアに設けられ、かつ前記励磁コイルと対向する検出コイルと、
を備え、
前記ステータコア、及び前記ロータコアの少なくともいずれか一方で、かつ少なくとも前記第1トランスコイル、前記第2トランスコイル、前記励磁コイル、及び前記検出コイルが配置されている箇所の一部に重なる領域に、前記ステータコア、及び前記ロータコアよりも電気抵抗が高く、渦電流の流れを阻害する抵抗部が少なくとも1つ設けられている
ことを特徴とするレゾルバ。 - 前記抵抗部は、前記ロータコアの回転軸線方向に直交する径方向に沿って形成されている
ことを特徴とする請求項1に記載のレゾルバ。 - 前記抵抗部は、前記ロータコアの回転方向に沿うように、回転軸線方向からみて湾曲形成されている
ことを特徴とする請求項1に記載のレゾルバ。 - 前記ステータコア、及び前記ロータコアは、板状に形成されており、
前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成されたスリットである
ことを特徴とする請求項1〜請求項3のいずれか1項に記載のレゾルバ。 - 前記抵抗部は、前記ステータコア、及び前記ロータコアの少なくともいずれかに形成された凹部である
ことを特徴とする請求項1〜請求項3のいずれか1項に記載のレゾルバ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120170A JP7118766B2 (ja) | 2018-06-25 | 2018-06-25 | レゾルバ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120170A JP7118766B2 (ja) | 2018-06-25 | 2018-06-25 | レゾルバ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020003230A true JP2020003230A (ja) | 2020-01-09 |
| JP7118766B2 JP7118766B2 (ja) | 2022-08-16 |
Family
ID=69099567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018120170A Active JP7118766B2 (ja) | 2018-06-25 | 2018-06-25 | レゾルバ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7118766B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021190375A (ja) * | 2020-06-03 | 2021-12-13 | ホシデン株式会社 | シールド部材、シールドユニット、及びコネクタモジュール |
| WO2022124416A1 (ja) * | 2020-12-11 | 2022-06-16 | マブチモーター株式会社 | レゾルバ |
| WO2025139441A1 (zh) * | 2023-12-27 | 2025-07-03 | 峰岹科技(深圳)股份有限公司 | 一种用于角度传感器的电磁结构及角度传感器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006006081A (ja) * | 2004-06-21 | 2006-01-05 | Asmo Co Ltd | ブラシレスモータおよび車両用送風装置 |
| JP2006138806A (ja) * | 2004-11-15 | 2006-06-01 | Tamagawa Seiki Co Ltd | ブラシレスレタイプ回転検出器 |
| JP2011226907A (ja) * | 2010-04-20 | 2011-11-10 | Aisan Ind Co Ltd | 回転角センサ |
-
2018
- 2018-06-25 JP JP2018120170A patent/JP7118766B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006006081A (ja) * | 2004-06-21 | 2006-01-05 | Asmo Co Ltd | ブラシレスモータおよび車両用送風装置 |
| JP2006138806A (ja) * | 2004-11-15 | 2006-06-01 | Tamagawa Seiki Co Ltd | ブラシレスレタイプ回転検出器 |
| JP2011226907A (ja) * | 2010-04-20 | 2011-11-10 | Aisan Ind Co Ltd | 回転角センサ |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021190375A (ja) * | 2020-06-03 | 2021-12-13 | ホシデン株式会社 | シールド部材、シールドユニット、及びコネクタモジュール |
| JP7411505B2 (ja) | 2020-06-03 | 2024-01-11 | ホシデン株式会社 | シールド部材、シールドユニット、及びコネクタモジュール |
| WO2022124416A1 (ja) * | 2020-12-11 | 2022-06-16 | マブチモーター株式会社 | レゾルバ |
| JP2022092918A (ja) * | 2020-12-11 | 2022-06-23 | マブチモーター株式会社 | レゾルバ |
| CN116648599A (zh) * | 2020-12-11 | 2023-08-25 | 马渊马达株式会社 | 旋转变压器 |
| CN116648599B (zh) * | 2020-12-11 | 2024-04-09 | 马渊马达株式会社 | 旋转变压器 |
| US12013263B2 (en) | 2020-12-11 | 2024-06-18 | Mabuchi Motor Co., Ltd. | Resolver |
| WO2025139441A1 (zh) * | 2023-12-27 | 2025-07-03 | 峰岹科技(深圳)股份有限公司 | 一种用于角度传感器的电磁结构及角度传感器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7118766B2 (ja) | 2022-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5275944B2 (ja) | シートコイル型レゾルバ | |
| EP1918681A1 (en) | Angle detector | |
| JP5110233B2 (ja) | 回転検出器用ステータの巻線方法とその巻線構造体及び回転検出器を用いた電動機 | |
| JPWO2011158415A1 (ja) | 回転検出器用ステータの巻線方法とその構造及び回転検出器を有する電動機 | |
| JP7118766B2 (ja) | レゾルバ | |
| JP2019530400A (ja) | ロータ位置感知装置およびこれを含むモータ | |
| JP2010043908A (ja) | 角度検出装置及びその製造方法 | |
| JP2018189485A (ja) | 角度検出器 | |
| US12018962B2 (en) | Resolver | |
| JP5275930B2 (ja) | シートコイル型レゾルバ | |
| JP2007267565A (ja) | コアレスモータ | |
| JP5295023B2 (ja) | 電動機 | |
| JP5342963B2 (ja) | シートコイル型レゾルバ | |
| JP2011002388A (ja) | シートコイル型レゾルバ | |
| JP4790054B2 (ja) | 磁気レゾルバ | |
| JP2009247112A (ja) | 磁束干渉低減型冗長系レゾルバ構造 | |
| JP7461967B2 (ja) | 回転電機、回転子及び電磁鋼板 | |
| JP5698715B2 (ja) | アキシャルギャップ型ブラシレスモータ | |
| JP2015119523A (ja) | レゾルバ | |
| US10686340B2 (en) | Interior permanent magnet motor | |
| JP2020003232A (ja) | レゾルバ | |
| JP2011202966A (ja) | 回転角センサ | |
| JP7734549B2 (ja) | レゾルバのステータ構造、および、レゾルバ | |
| JP7172979B2 (ja) | 回転電機 | |
| JP2005237191A (ja) | モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220408 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7118766 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |