JP2020003289A - 劣化検出装置及び劣化検出方法 - Google Patents
劣化検出装置及び劣化検出方法 Download PDFInfo
- Publication number
- JP2020003289A JP2020003289A JP2018121745A JP2018121745A JP2020003289A JP 2020003289 A JP2020003289 A JP 2020003289A JP 2018121745 A JP2018121745 A JP 2018121745A JP 2018121745 A JP2018121745 A JP 2018121745A JP 2020003289 A JP2020003289 A JP 2020003289A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- conductor
- electric wire
- pair
- sensor units
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 127
- 230000015556 catabolic process Effects 0.000 title abstract 6
- 238000006731 degradation reaction Methods 0.000 title abstract 6
- 239000004020 conductor Substances 0.000 claims abstract description 44
- 230000005284 excitation Effects 0.000 claims abstract description 23
- 230000006866 deterioration Effects 0.000 claims description 38
- 230000007797 corrosion Effects 0.000 description 12
- 238000005260 corrosion Methods 0.000 description 12
- 230000007423 decrease Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images







Landscapes
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
Abstract
【課題】導体とセンサ部との距離が変動しても、劣化の検出精度の向上を図ることができる劣化検出装置及び劣化検出方法を提供する。【解決手段】センサ部11A、11Bは、導体22に渦電流を発生させるための励磁コイル111A、111B、及び、渦電流に応じた検出信号を出力するための検出コイル112A、112Bと、を有する。センサ部11A、11Bは、一対設けられる。一対のセンサ部11A、11Bが一定間隔空けて対向配置され、一対のセンサ部11A、11B間に導体22が配置されるように、一対のセンサ部11A、11Bが保持部14に保持されている。制御部17が、各センサ部11A、11Bから出力される検出信号の和に基づいて導体22の劣化を検出する。【選択図】図1
Description
本発明は、劣化検出装置及び劣化検出方法に関する。
従来の劣化検出方法として、渦電流探傷法が知られている。渦電流探傷法では、励磁コイルに励磁電流を流して導体に渦電流を発生させ、検出コイルから出力される渦電流に応じた検出出力に基づいて劣化を検出する。
上記渦電流の大きさは、導体の劣化状態の違いのみならず、励磁コイル及び検出コイルから成るセンサ部と導体との距離によっても変化する。そこで、センサ部と導体との距離を一定に保ち、劣化状態の検出精度向上を図った特許文献1の渦電流探傷センサが提案されている。
特許文献1の渦電流探傷センサは、治具に設けた貫通孔に導体を有する電線を嵌め、治具の外周に励磁コイル及び検出コイルを巻き付けて、強制的に電線とセンサ部の距離を一定に保っている。しかしながら、電線とセンサ部との距離を一定に保つには、電線と治具とのクリアランスを極力抑える必要がある。
このため、電線の外径や形状に合わせた貫通孔を都度用意する必要があり、コスト的に問題があった。また、治具との摩擦などにより電線が傷つく恐れがあった。さらに、電線上に異物が付着していた場合、治具と異物等が干渉し、劣化状態の検出自体が困難になる可能性があった。
本発明は、以上の背景に鑑みてなされたものであり、導体とセンサ部との距離が変動しても、劣化の検出精度の向上を図ることができる劣化検出装置及び劣化検出方法を提供することを目的としている。
本発明の態様である劣化検出装置は、導体に渦電流を発生させるための励磁コイル、及び、前記渦電流に応じた検出信号を出力するための検出コイル、を有するセンサ部を備えた劣化検出装置において、前記センサ部が、一対設けられ、前記一対のセンサ部が一定間隔空けて対向配置され、前記一対のセンサ部間に前記導体が配置されるように、前記一対のセンサ部を保持する保持部を備えたことを特徴とする。
また、前記一対のセンサ部双方から出力される検出信号に基づいて前記導体の劣化を検出する検出部を備えてもよい。
また、前記導体が、電線の導体から構成され、前記導体を前記保持部に対して、前記導体の長手方向に沿って移動させる移動部を備えてもよい。
本発明の態様である劣化検出方法は、導体の劣化状態を検出するための劣化検出方法であって、前記導体に渦電流を発生させるための励磁コイル、及び、前記渦電流に応じた検出信号を出力する検出コイル、をそれぞれ有する一対のセンサ部を一定間隔空けて対向配置し、前記一対のセンサ部間に前記導体を配置する配置工程と、前記一対のセンサ部双方から出力される前記検出信号に基づいて前記導体の劣化を検出する検出工程と、を備えたことを特徴とする。
以上説明したように態様によれば、一対のセンサ部の一方と導体との距離が小さくなると、一対のセンサ部の他方と導体との距離が長くなるため、一対のセンサ部から出力される検出信号の和は、一対のセンサ部間における導体位置に依存しにくくなる。このため、導体とセンサ部との距離が変動しても、検出精度の向上を図ることができる。
以下、本発明の一実施形態を図1に基づいて説明する。同図に示す劣化検出装置1は、電線2の導体22の劣化状態(=腐食状態)を検出する装置である。電線2は、図3及び図4に示すように、複数の素線21を撚り合わせた導体22と、この導体22を覆う被覆部23と、を備えている。
劣化検出装置1は、図1に示すように、一対のセンサ部11A、11Bと、一対の交流電源12A、12Bと、一対の検出部13A、13Bと、保持部14(図2〜図4参照)と、電線移動部15と、表示部16と、制御部17と、を備えている。
センサ部11Aは、励磁コイル111Aと、検出コイル112Aと、を有している。センサ部11Bは、励磁コイル111Bと、検出コイル112Bと、を有している。
励磁コイル111A、111B及び検出コイル112A、112Bは各々、巻線を、例えば、らせん状に巻回して構成されている。励磁コイル111A、111Bは、励磁信号(交流電流)を流して電線2の表面に渦電流を誘導させるためのコイルである。検出コイル112A、112Bは、渦電流による磁束変化により誘導電流が流れるコイルである。
交流電源12A、12Bは、励磁コイル111A、111Bに励磁信号を流す電源である。検出部13A、13Bは、検出コイル112A、112Bに流れる誘導電流を検出して、検出信号として出力する。即ち、検出信号は渦電流に応じた信号である。
保持部14は、一対のセンサ部11A、11Bを保持する。保持部14は、電線2の長手方向D1に長尺の箱型に形成されている。保持部14において長手方向D1に対向する一対の壁部141には、電線2を通す貫通孔142がそれぞれ設けられている。
また、図3及び図4に示すように、保持部14において電線2の径方向D2(図中上下方向)に対向する一対の壁部143の内側には各々、センサ部11A、11Bが取り付けられている(固定されている)。
詳しくは、図中上側の壁部143にセンサ部11Aが取り付けられ、図中下側の壁部143にセンサ部11Bが取り付けられている。これにより、一対のセンサ部11A、11B間の径方向D2の距離L1は常時一定となる。
詳しく説明すると、励磁コイル111A及び励磁コイル111Bは、径方向D2に一定間隔空けて対向するように、上側、下側の壁部143にそれぞれ取り付けられている。検出コイル112A及び検出コイル112Bは、径方向D2に一定間隔空けて対向するように、上側、下側の壁部143にそれぞれ取り付けられている。
さらに、励磁コイル111A及び検出コイル112Aは、長手方向D1に沿って並べられ、一部が重なるように上側の壁部143に取り付けられている。励磁コイル111B及び検出コイル112Bは、長手方向D1に沿って並べられ、一部が重なるように下側の壁部143に取り付けられている。
そして、上記壁部141に設けた貫通孔142内に電線2を通すことにより、図3及び図4に示すように、保持部14内に電線2が挿入され、センサ部11A、11B間に電線2が配置される。
移動部としての電線移動部15は、保持部14に取り付けられた走行コロ151(図5)と、走行コロ151を駆動するモータ152(図1)と、を有している。走行コロ151は、回転軸A1を中心に回転自在に保持部14に保持されている。回転軸A1は、長手方向D1及び径方向D2の双方に垂直な方向に沿っている。また、本実施形態において走行コロ151は、長手方向D1に沿って2つ並べて設けられ、2つの走行コロ151の間にセンサ部11A、11Bが配置されている。そして、保持部14内に電線2を通すと、走行コロ151が電線2に接触する。
なお、本実施形態では、走行コロ151は電線2の上側に2つ設けられているが、これに限ったものではない。下側にも走行コロ151を設け、走行コロ151により電線2を挟むようにしてもよい。また、走行コロ151を電線2に向けて付勢するバネにより支持して、確実に走行コロ151と電線2とが接触するようにしてもよい。
モータ152は、走行コロ151を回転軸A1周りに回転させる駆動力を与える。モータ152により走行コロ151を回転させると、電線2が長手方向D1に沿って移動する。
表示部16は、腐食の検出結果を表示するためのものである。
制御部17は、CPU、ROM、RAMなどを内蔵したマイクロコンピュータから構成され、劣化検出装置1全体の制御を司る。制御部17は、交流電源12A、12Bに接続され、交流電源12A、12Bのオンオフを制御する。制御部17は、モータ152に接続され、モータ152の駆動を制御する。
制御部17は、検出部13A、13Bに接続され、検出部13A、13Bから出力された検出信号が入力される。制御部17は、検出部として機能し、それぞれの検出信号の大きさ(振幅)を求め、その和を算出し、算出した和に基づいて電線2の劣化を検出し、表示部16に表示させる。
次に、上記劣化検出装置1を用いた劣化検出方法の原理について図6及び図7を参照して説明する。
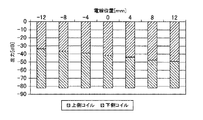
本発明者らは、電線2を図3に示すように中央に配置し、電線2に渦電流を発生させ、そのときの検出信号を測定した。中央とは、距離L21(電線2−上側センサ部11A間の距離)=距離L22(電線2−下側センサ部11B間の距離)となる位置である。また、本発明者らは、電線2を図4に示すように中央に対して上側に4mm、8mm、12mmの位置に配置し(即ち距離L21<距離L22)、電線2に渦電流を発生させ、そのときの検出信号を測定した。さらに、本発明者らは、電線2を中央に対して下側に4mm、8mm、12mmの位置に配置し(即ち距離L21>距離L22)、電線2に渦電流を発生させ、そのときの検出信号を測定した。これら測定した結果を図6に示す。
図6に示すように、中央配置では上側検出コイル112Aからの検出信号の大きさ(出力値)と、下側検出コイル112Bからの検出信号の大きさと、は等しい。一方、中央に対して上側の位置では、電線2と上側センサ部11Aとの距離が近づくに従って上側検出コイル112Aからの検出信号が大きくなるのに対して、電線2と下側センサ部11Bとの距離が離れるに従って下側検出コイル112Bの検出信号が小さくなる。
また、中央に対して下側の位置では、電線2と上側センサ部11Aとの距離が離れるに従って上側検出コイル112Aからの検出信号が小さくなるのに対して、電線2と下側センサ部11Bとの距離が近づくに従って下側検出コイル112Bの検出信号が大きくなる。即ち、検出コイル112A、112Bからの検出信号の大きさの和は、電線2の位置に依存することなく、一定であることが分かる。
次に、本発明者らは、図3及び図4に示す位置それぞれに電線2が配置されているとき、励磁コイル111A、111Bを用いて腐食が発生していない健全な電線2、腐食の発生している電線2の各々に渦電流を発生させ、検出コイル112A、112Bからの検出信号を測定した。結果を図7に示す。
同図に示すように、検出コイル112A、112Bの検出信号の大きさの和は、電線2の位置に依存することなく、一定であることが分かる。また、検出コイル112A、112Bの検出信号の大きさの和は、腐食が発生すると低下し、電線2の腐食レベルに依存して変動していることも分かる。そこで、本実施形態では、制御部17は、検出コイル112A、112Bからの検出信号の大きさ(振幅)をそれぞれ求め、その和を算出し、算出した和に基づいて電線2の劣化を検出し、表示部16に表示させる。
次に、上述した構成の劣化検出装置1の動作について図8を参照して説明する。まず、作業員が、保持部14の貫通孔142から電線2を挿入する。これにより、図3及び図4に示すように、2つのセンサ部11A、11B間に、電線2を位置づけることができる。次に、作業員が図示しない操作部を操作すると、制御部17は、図8に示す処理を実行する。
まず、制御部17は、交流電源12A、12Bをオンする(ステップS1)。これにより、励磁コイル111A、111Bに励磁信号が流れて、電線2の導体22表面に渦電流が誘導される。
次に、制御部17は、検出部13A、13Bからそれぞれ出力される検出信号を取り込む(ステップS2)。次に、制御部17は、取り込んだ検出信号の和を求めて、RAM等の記憶部に記憶させる(ステップS3)。
その後、制御部17は、作業員によって終了操作が行われた否かを判定する(ステップS4)。終了操作が行われていなければ(ステップS4でN)、制御部17は、モータ152を駆動して電線2を長手方向D1に沿って所定距離移動させた後(ステップS5)、ステップS2に戻る。これにより、RAMには、電線2が移動する毎に、検出信号の和が記憶される。
一方、終了操作が行われていれば(ステップS4でY)、制御部17は、RAM内に記憶された複数の検出信号の和に基づいて電線2の腐食を検出し、その検出結果を表示部16に表示して(ステップS6)、処理を終了する。
ステップS6において、制御部17は、例えば、RAMに記憶されている検出信号の和のうちが閾値以下のものが、閾値より大きいものよりも多きときに腐食を検出するようにしてもよい。または、RAMに記憶されている複数の検出信号の和を積算し、その積算値が閾値以下の場合に腐食を検出するようにしてもよい。
なお、上記閾値は、事前に腐食が発生していない電線2をセンサ部11A、11Bにより走査し、そのときの検出信号に基づいて定められる。
上述した実施形態によれば、センサ部11A、11Bが、一対設けられ、一対のセンサ部11A、11Bが一定間隔空けて対向配置されている。保持部14が、一対のセンサ部11A、11B間に電線2の導体22が配置されるように、一対のセンサ部11A、11Bを保持する。これにより、電線2とセンサ部11A、11Bとの距離が変動しても、検出信号の和は、変動することがないため、検出精度の向上を図ることができる。
また、保持部14と電線2との間のクリアランスがあっても検出精度には影響しないため、電線2の外径や形状毎に保持部14を用意する必要がなく、コストダウンを図ることができる。また、保持部14と電線2とのクリアランスがあってもよいため、電線2を傷つけたり、異物と干渉する恐れがない。
また、上述した実施形態によれば、電線2を保持部14に対して、長手方向D1に沿って移動させる。これにより、電線2の長手方向D1全体の腐食を検出することができる。
なお、上述した実施形態によれば、制御部17は、2つの検出信号の和に基づいて電線2の腐食を検出し、その結果を表示部16に表示していたが、これに限ったものではない。制御部17は、2つの検出信号又は2つの検出信号の和を表示部16に表示し、作業員が表示された2つの検出信号又は2つの検出信号の和に基づいて電線2の腐食を判断するようにしてもよい。
また、上述した実施形態によれば、電線2を移動させて、電線2を励磁コイル111A、111B、検出コイル112A、112Bに対して移動させていたが、これに限ったものではない。保持部14を移動させて、電線2を励磁コイル111A、111B、検出コイル112A、112Bに対して移動させるようにしてもよい。
また、上述した実施形態によれば、電線2の導体22の劣化を検出していたが、これに限ったものではない。電線2の導体22でなくてもよい。
なお、本発明は上記実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
1 劣化検出装置
2 電線
22 導体
11A、11B センサ部
14 保持部
15 電線移動部(移動部)
17 制御部(検出部)
111A、111B 励磁コイル
112A、112B 検出コイル
D1 長手方向
2 電線
22 導体
11A、11B センサ部
14 保持部
15 電線移動部(移動部)
17 制御部(検出部)
111A、111B 励磁コイル
112A、112B 検出コイル
D1 長手方向
Claims (4)
- 導体に渦電流を発生させるための励磁コイル、及び、前記渦電流に応じた検出信号を出力するための検出コイル、を有するセンサ部を備えた劣化検出装置において、
前記センサ部が、一対設けられ、
前記一対のセンサ部が一定間隔空けて対向配置され、前記一対のセンサ部間に前記導体が配置されるように、前記一対のセンサ部を保持する保持部を備えたことを特徴とする劣化検出装置。 - 前記一対のセンサ部双方から出力される検出信号に基づいて前記導体の劣化を検出する検出部を備えたことを特徴とする請求項1に記載の劣化検出装置。
- 前記導体、電線の導体から構成され、
前記導体を前記保持部に対して、前記導体の長手方向に沿って移動させる移動部を備えたことを特徴とする請求項1又は2に記載の劣化検出装置。 - 導体の劣化状態を検出するための劣化検出方法であって、
前記導体に渦電流を発生させるための励磁コイル、及び、前記渦電流に応じた検出信号を出力する検出コイル、をそれぞれ有する一対のセンサ部を一定間隔空けて対向配置し、前記一対のセンサ部間に前記導体を配置する配置工程と、
前記一対のセンサ部双方から出力される前記検出信号に基づいて前記導体の劣化を検出する検出工程と、を備えたことを特徴とする劣化検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018121745A JP2020003289A (ja) | 2018-06-27 | 2018-06-27 | 劣化検出装置及び劣化検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018121745A JP2020003289A (ja) | 2018-06-27 | 2018-06-27 | 劣化検出装置及び劣化検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020003289A true JP2020003289A (ja) | 2020-01-09 |
Family
ID=69099541
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018121745A Abandoned JP2020003289A (ja) | 2018-06-27 | 2018-06-27 | 劣化検出装置及び劣化検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020003289A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61243356A (ja) * | 1985-04-19 | 1986-10-29 | Nippon Steel Corp | 渦流探傷試験装置 |
| JPH0228551A (ja) * | 1988-07-19 | 1990-01-30 | Hitachi Metals Ltd | 渦流探傷装置および同装置用検出コイル |
| JP2002039997A (ja) * | 2000-07-28 | 2002-02-06 | Nippon Steel Corp | 磁性測定装置及び方法 |
| JP2007271607A (ja) * | 2006-03-07 | 2007-10-18 | Tokyo Electric Power Co Inc:The | 異常検出装置 |
| US20170299666A1 (en) * | 2014-11-17 | 2017-10-19 | Halliburton Energy Services, Inc. | Rapid Magnetic Hotspot Detector |
-
2018
- 2018-06-27 JP JP2018121745A patent/JP2020003289A/ja not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61243356A (ja) * | 1985-04-19 | 1986-10-29 | Nippon Steel Corp | 渦流探傷試験装置 |
| JPH0228551A (ja) * | 1988-07-19 | 1990-01-30 | Hitachi Metals Ltd | 渦流探傷装置および同装置用検出コイル |
| JP2002039997A (ja) * | 2000-07-28 | 2002-02-06 | Nippon Steel Corp | 磁性測定装置及び方法 |
| JP2007271607A (ja) * | 2006-03-07 | 2007-10-18 | Tokyo Electric Power Co Inc:The | 異常検出装置 |
| US20170299666A1 (en) * | 2014-11-17 | 2017-10-19 | Halliburton Energy Services, Inc. | Rapid Magnetic Hotspot Detector |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6879389B2 (ja) | ワイヤロープ検査装置、ワイヤロープ検査システムおよびワイヤロープ検査方法 | |
| CN101013106B (zh) | 钢缆的探伤装置 | |
| JP5201495B2 (ja) | 磁気探傷方法及び磁気探傷装置 | |
| JP7231357B2 (ja) | 導体劣化検出装置 | |
| JP7231356B2 (ja) | 導体劣化検出装置 | |
| JP7200697B2 (ja) | ワイヤロープ検査装置およびワイヤロープ検査方法 | |
| JP2005162430A (ja) | コンベアベルトの縦裂き検出装置 | |
| JP2020003289A (ja) | 劣化検出装置及び劣化検出方法 | |
| JP3143572U (ja) | ロープ損傷検出装置 | |
| JP5981706B2 (ja) | 電磁誘導式検査方法及び電磁誘導式検査装置 | |
| JP5368491B2 (ja) | ワイヤロープ探傷装置の出力確認方法及び出力確認装置 | |
| JP4179149B2 (ja) | ワイヤロープの磁気探傷装置および磁気探傷装置付滑車 | |
| JP6770455B2 (ja) | 渦電流探傷検査装置 | |
| JP2016024169A (ja) | 渦電流探傷プローブ | |
| JP5129014B2 (ja) | ワイヤーロープの探傷装置 | |
| JP5286127B2 (ja) | シールド部材の異常検出方法及びシールド部材の異常検出装置 | |
| JP7143690B2 (ja) | 磁性体検査システム、磁性体検査装置および磁性体検査方法 | |
| JP7061791B2 (ja) | ワイヤロープの探傷検査方法 | |
| JP6403994B2 (ja) | 巻線短絡箇所の診断システム | |
| JP2014066688A (ja) | 渦流探傷プローブ、渦流探傷装置 | |
| JP4484723B2 (ja) | 渦電流探傷用プローブ | |
| JP7204291B2 (ja) | 劣化検出方法及び劣化検出装置 | |
| JP6984975B2 (ja) | 腐食診断方法及び腐食診断装置 | |
| JP2020038072A5 (ja) | ||
| JP4762672B2 (ja) | 磁性材料屈曲部破断検査方法及び検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220405 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20220601 |