JP2020006465A - 吸着パッド - Google Patents
吸着パッド Download PDFInfo
- Publication number
- JP2020006465A JP2020006465A JP2018128759A JP2018128759A JP2020006465A JP 2020006465 A JP2020006465 A JP 2020006465A JP 2018128759 A JP2018128759 A JP 2018128759A JP 2018128759 A JP2018128759 A JP 2018128759A JP 2020006465 A JP2020006465 A JP 2020006465A
- Authority
- JP
- Japan
- Prior art keywords
- suction
- suction pad
- peripheral portion
- force
- space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Manipulator (AREA)
- Hooks, Suction Cups, And Attachment By Adhesive Means (AREA)
Abstract
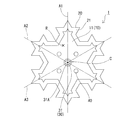
【解決手段】吸着パッド1は、被吸着面との間に空間Rを形成し、空間Rを負圧にすることにより被吸着面に吸着する基体部10と、基体部10から突出して形成され、被吸着面に吸着する際に被吸着面に当接する当接面21を有しており、内側に空間Rが形成される環状の周縁部20と、を備えている。周縁部20は、当接面21を水平面に当接させた状態における平面形状が凹凸状をなしている。
【選択図】図3
Description
また、この種の吸着パッドでは、吸着面の平面形状が円形状であるものが一般的である。平面形状が円形状の吸着パッドは、負圧による応力集中を好適に回避することができるとともに、設計や製造も容易である。
前記基体部から突出して形成され、前記被吸着面に吸着する際に前記被吸着面に当接する当接面を有しており、内側に前記空間が形成される環状の周縁部と、
を備えており、
前記周縁部は、前記当接面を水平面に当接させた状態における平面形状が凹凸状をなしていることを特徴とする。
本発明の吸着パッドにおいて、前記周縁部は、前記平面形状がm回対称性(mは2以上の整数)を有し得る。この場合、吸着面の異方性を減少させることができる。すなわち、より長い周長を確保するために平面形状を凹凸状に形成した周縁部において、平面形状に対称性を持たせたことで、被吸着面に吸着する際の向きによる吸着力の差を軽減することができる。また、負圧による力が周縁部の特定部位にのみ過剰に作用することを回避することができる。このため、安定的に吸着力を発揮することができる。
本実施例の吸着パッド1は、図1に示すようなロボット100の吸着機構に用いられる。ロボット100は複数の吸着パッド1を備えており、ビルの外壁や橋梁の裏面などを被吸着面Aとして、複数の吸着パッド1を被吸着面Aに順繰りに吸着させつつ被吸着面A上を移動し、インフラ点検やビル清掃等を行う。
基体部10は、被吸着面Aとの間に空間Rを形成し、空間Rを負圧にすることにより被吸着面Aに吸着する。図1に示すように、基体部10は所定の厚さを有する板状に形成されており、その一方の面11側に空間Rを形成している。
最初に、ある線分について、3等分する2点を設定する。次に、分割された3つの線分のうち、分割点となった2点間の線分を、各線分と同じ長さであり、且つ一方の端点同士が連結されるとともに他方の端点が分割点となった2点にそれぞれ連結された2つの線分に置き換える。これにより、元の線分が、元の線分の3分の1の長さの4つの線分に置き換えられる。すなわち、コッホ曲線ステップn時図形の長さは、ステップ(n−1)時図形の長さの4/3倍となる。このような操作を1ステップとして、得られた各線分に対して同じ操作を無限に繰り返すことにより、長さが無限のコッホ曲線が作成される。図4は、コッホ曲線を作成する過程における初期の段階であるステップ0〜3の時の各図形を示している。
吸着パッド1を被吸着面Aに当接させると、貫通孔31Aから負圧吸引されることにより、空間R内には負圧が生じる。この負圧と大気圧との差圧によって、吸着パッド1は被吸着面Aに押圧され、周縁部20の当接面21が被吸着面Aに押し付けられる。これにより、吸着パッド1は被吸着面Aに吸着する。吸着パッド1が被吸着面Aに吸着する際には、負圧による力Wが生じている。負圧による力Wは、負圧と大気圧との差圧と、この差圧が作用する面積である空間Rの開口面積(負圧媒体である空気の被吸着面Aとの接触面積)と、を乗じたものとして表される。この負圧による力Wは、被吸着面Aに対して垂直方向に作用する。また、周縁部20の当接面21が被吸着面Aに当接する際には、凸部40も同様に当接する。この凸部40は、上述のように、中心軸C周りに等間隔に4つ設けられている。このため、これら凸部40の作用により、PDMS製の基体部10及び周縁部20の負圧による変形が好適に抑制される。
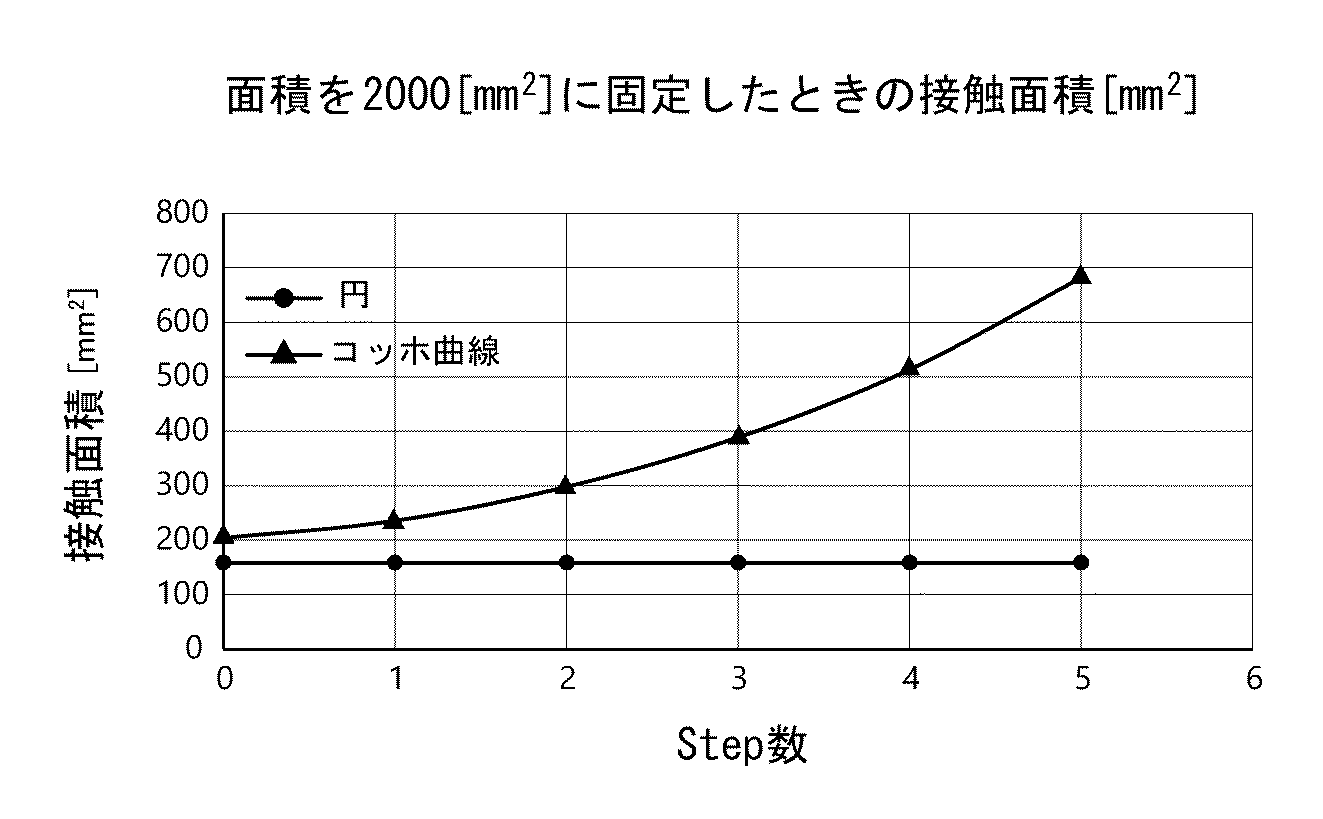
本発明の吸着パッドの効果を確認するために行った実験の結果を図7に示す。実験では、図7に示すように、平面形状が(1)円形状、(2)コッホ曲線ステップ1時図形を用いたコッホ雪片状の形状、及び(3)コッホ曲線ステップ2時図形を用いたコッホ雪片状の形状(実施例相当)の周縁部をそれぞれ備えた3種類の吸着パッドを用い、これら(1)〜(3)のせん断方向の吸着力(吸着力Fh)を測定した。せん断方向の吸着力の測定は、被吸着面に吸着させた各吸着パッドに対してせん断方向に荷重をかけ、吸着パッドの脱落時の荷重の大きさをそれぞれ12回ずつ測定した。吸着パッド(1)〜(3)は、周縁部内側の空間(空間R)の開口面積(約2000mm2)、及び周縁部先端の当接面の幅(約1mm)を共通とした。被吸着面としては平滑なアクリル板を用い、これを垂直に立設した。また、吸着パッド(1)〜(3)の被吸着面への吸着時には、真空ポンプによって周縁部内側の空間内の負圧吸引を行った。真空ポンプは、周縁部内側の空間の容積に比して十分に大きな容積を有する真空容器を介して吸着パッドに接続した。吸着時の圧力は−0.03MPaとした。
(1)実施例では、吸着パッドを、ビルの外壁や橋梁の裏面などの壁面移動用ロボットに適用する形態を例示したが、据置型ロボットのアーム先端の吸着パッド等、負圧により被吸着面に吸着する用途全般に適用できる。特に、吸着面と被吸着面との間にせん断力が作用する立壁面への吸着に好適である。
(2)実施例では、PDMS製の基体部及び周縁部としたが、これに限定されない。基体部及び周縁部としては、弾性体であることが好ましいが、その材質等は特に問わない。
(3)実施例では、吸引部としての貫通孔を備えて負圧吸引される形態を例示したが、これは必須ではない。本発明の吸着パッドは、吸引部を備えない形態で被吸着面に吸着する形態であってもよい。この場合、弾性を有する基体部の吸着面を被吸着面に押し付けて変形させることにより、吸盤のように吸着面と被吸着面の間に負圧を生じさせて吸着することができ、簡易な構成の吸着パッドを実現することができる。
(4)実施例では、負圧媒体として空気を例示したが、他の気体や、水等の液体等、空気以外の流体を採用してもよい。
(5)実施例では、周縁部がm回対称性(mは2以上の整数)の平面形状を有する形態を例示したが、これは必須の構成ではなく、周縁部がm回対称性の平面形状を有さない形態であってもよい。
(6)実施例では、周縁部が線対称性の平面形状を有する形態を例示したが、これは必須の構成ではない。周縁部は、線対称性の平面形状を有さない形態であってもよい。また、線対称性の平面形状を有する場合、各々の対称形状が同一形状となる対称軸の数は、2以下であってもよいし4以上であってもよい。
(7)実施例では、凸部を備える形態を例示したが、これは必須の構成ではない。また、凸部を備える場合には、その形状や大きさ、個数等は特に限定されない。
(8)実施例では、周縁部は、平面形状がコッホ曲線を作成する過程で得られるステップn時の図形の形状をなしている形態を例示したが、これは必須の構成ではない。周縁部の平面形状がコッホ曲線を作成する過程で得られるステップn時の図形の形状をなしている場合、そのステップ数nは、1以上であればよい。また、ステップn時図形の形状は、周縁部の少なくとも一部に用いられている形態であってもよい。また、コッホ曲線に替えて、シェルペンスキー曲線等の他の空間充填曲線を用いたフラクタル図形の形状を採用してもよく、これらの場合も、より長い周長の周縁部が容易に得られる。
1A…吸着面
10…基体部
11…基体部の空間側の一面
20…周縁部
21…当接面
30…保持部材
31…筒状部
31A…貫通孔
40…凸部
100…ロボット
A…被吸着面
A1,A2,A3…対称軸
C…中心軸
Fh…垂直方向の吸着力
Fv…せん断方向の吸着力
R…空間
W…負圧による力
Claims (6)
- 被吸着面との間に空間を形成し、その空間を負圧にすることにより前記被吸着面に吸着する基体部と、
前記基体部から突出して形成され、前記被吸着面に吸着する際に前記被吸着面に当接する当接面を有しており、内側に前記空間が形成される環状の周縁部と、
を備えており、
前記周縁部は、前記当接面を水平面に当接させた状態における平面形状が凹凸状をなしていることを特徴とする吸着パッド。 - 前記周縁部は、前記平面形状がm回対称性(mは2以上の整数)を有していることを特徴とする請求項1記載の吸着パッド。
- 前記周縁部は、前記平面形状が線対称性を有していることを特徴とする請求項1又は2記載の吸着パッド。
- 前記周縁部は、前記平面形状の少なくとも一部がコッホ曲線を作成する過程で得られるステップn(nは1以上の整数)時の図形の形状をなしていることを特徴とする請求項1乃至3のいずれか一項に記載の吸着パッド。
- 前記基体部から前記空間内に突出する凸部を備えていることを特徴とする請求項1乃至4のいずれか一項に記載の吸着パッド。
- 前記被吸着面に吸着する際に、前記空間を負圧吸引する吸引部を備えていることを特徴とする請求項1乃至5のいずれか一項に記載の吸着パッド。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018128759A JP7109066B2 (ja) | 2018-07-06 | 2018-07-06 | 吸着パッド |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018128759A JP7109066B2 (ja) | 2018-07-06 | 2018-07-06 | 吸着パッド |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020006465A true JP2020006465A (ja) | 2020-01-16 |
| JP7109066B2 JP7109066B2 (ja) | 2022-07-29 |
Family
ID=69150093
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018128759A Expired - Fee Related JP7109066B2 (ja) | 2018-07-06 | 2018-07-06 | 吸着パッド |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7109066B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022057392A (ja) * | 2020-09-30 | 2022-04-11 | 凸版印刷株式会社 | 吸着装置 |
| WO2023136197A1 (ja) * | 2022-01-12 | 2023-07-20 | 東京エレクトロン株式会社 | 搬送アーム及び基板搬送装置 |
| JP2023102751A (ja) * | 2022-01-12 | 2023-07-25 | 東京エレクトロン株式会社 | 搬送アーム及び基板搬送装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5324073U (ja) * | 1976-08-05 | 1978-03-01 | ||
| JP2006281381A (ja) * | 2005-03-31 | 2006-10-19 | Kobe Steel Ltd | 吸引パッドおよび板材検査装置 |
| KR20110130129A (ko) * | 2010-05-27 | 2011-12-05 | (주)알테크 | 흡착력이 강화된 흡판을 구비한 차량용 거치대 |
| US20160005774A1 (en) * | 2014-07-03 | 2016-01-07 | Omnivision Technologies, Inc. | Fractal-Edge Thin Film And Method Of Manufacture |
| WO2018044861A1 (en) * | 2016-08-29 | 2018-03-08 | Hershoff Craig L | Contact lens manipulator with suction cup and safety release mechanism |
| JP2019027456A (ja) * | 2017-07-26 | 2019-02-21 | 株式会社レーベン | 吸盤及び吸盤を用いた器具 |
-
2018
- 2018-07-06 JP JP2018128759A patent/JP7109066B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5324073U (ja) * | 1976-08-05 | 1978-03-01 | ||
| JP2006281381A (ja) * | 2005-03-31 | 2006-10-19 | Kobe Steel Ltd | 吸引パッドおよび板材検査装置 |
| KR20110130129A (ko) * | 2010-05-27 | 2011-12-05 | (주)알테크 | 흡착력이 강화된 흡판을 구비한 차량용 거치대 |
| US20160005774A1 (en) * | 2014-07-03 | 2016-01-07 | Omnivision Technologies, Inc. | Fractal-Edge Thin Film And Method Of Manufacture |
| WO2018044861A1 (en) * | 2016-08-29 | 2018-03-08 | Hershoff Craig L | Contact lens manipulator with suction cup and safety release mechanism |
| JP2019027456A (ja) * | 2017-07-26 | 2019-02-21 | 株式会社レーベン | 吸盤及び吸盤を用いた器具 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022057392A (ja) * | 2020-09-30 | 2022-04-11 | 凸版印刷株式会社 | 吸着装置 |
| WO2023136197A1 (ja) * | 2022-01-12 | 2023-07-20 | 東京エレクトロン株式会社 | 搬送アーム及び基板搬送装置 |
| JP2023102751A (ja) * | 2022-01-12 | 2023-07-25 | 東京エレクトロン株式会社 | 搬送アーム及び基板搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7109066B2 (ja) | 2022-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020006465A (ja) | 吸着パッド | |
| US6527323B2 (en) | Suction pad having a patterned attracting surface | |
| US10437390B2 (en) | Frame fastening assembly, frame assembly and method of mounting a frame | |
| JP6707227B2 (ja) | 吸着装置、飛行ロボット | |
| KR101640743B1 (ko) | 자유변형 흡착척 | |
| JP2017220483A (ja) | 真空チャック及び真空チャックの製造方法 | |
| CN110815281A (zh) | 一种柔性非平面抓取装置 | |
| CN107250574B (zh) | 真空吸盘 | |
| CN101685720B (zh) | 旋钮开关 | |
| CN212062414U (zh) | 基板支架及包括该支架的基板支撑装置 | |
| CN109192691A (zh) | 晶片传送装置以及半导体加工设备 | |
| JPS62215117A (ja) | 負圧吸着装置 | |
| CN114229459B (zh) | 一种吸取结构 | |
| JP2013032848A (ja) | U形シール | |
| JP3123596U (ja) | 吸盤構造 | |
| CN102667187A (zh) | 吸盘 | |
| KR101689653B1 (ko) | 고정구 | |
| JP2017124467A (ja) | 吸着器 | |
| JP7169858B2 (ja) | ダイヤフラム移送装置及び液体封入式防振マウントの製造方法 | |
| JPH07214489A (ja) | 吸着パッド | |
| JP7330139B2 (ja) | 加圧用吸着台およびこれを具備する加圧装置 | |
| JPH0738305Y2 (ja) | 真空吸着プレート | |
| TWM534786U (zh) | 吸盤 | |
| KR102347223B1 (ko) | 건식 흡착패드 | |
| WO2007015571A1 (ja) | 穴あき両面吸盤 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210408 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220711 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7109066 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |