JP2020007095A - エレベーター据付装置 - Google Patents
エレベーター据付装置 Download PDFInfo
- Publication number
- JP2020007095A JP2020007095A JP2018129513A JP2018129513A JP2020007095A JP 2020007095 A JP2020007095 A JP 2020007095A JP 2018129513 A JP2018129513 A JP 2018129513A JP 2018129513 A JP2018129513 A JP 2018129513A JP 2020007095 A JP2020007095 A JP 2020007095A
- Authority
- JP
- Japan
- Prior art keywords
- drilling tool
- hoistway
- support mechanism
- axis
- inclination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B19/00—Mining-hoist operation
- B66B19/002—Mining-hoist operation installing or exchanging guide rails
Landscapes
- Drilling And Boring (AREA)
- Manipulator (AREA)
- Types And Forms Of Lifts (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Abstract
【課題】昇降路の壁面形状の測定データに影響されることなく、昇降路の壁面に垂直にブラケットを固定するための穴を形成することを可能とするエレベーター据付装置を提供する。【課題解決手段】本発明は、穴開け工具の傾きを検出する穴開け工具傾き検出装置と、穴開け工具の傾きを調整する穴開け工具傾き調整装置と、制御装置と、備え、穴開け工具傾き検出装置は、昇降路の壁面と穴開け工具の軸の交わる角度を検出し、制御装置は、検出された確度に基づいて、穴開け工具傾き調整装置によって穴開け工具の傾きを調整して、穴開け工具の軸が昇降路壁面に対して垂直になるように穴開け工具の先端を位置決めし、穴開け工具を前記昇降路壁面に対して垂直に押すようにした。【選択図】図1
Description
本発明は、昇降路内でエレベーターを自動で据え付ける装置に関するものであり、より詳しくは、エレベーターのガイドレールやドアの部品を昇降路に固定する作業において、アンカーボルトを打ち込むための、昇降路壁面への穴開け作業を自動で行う装置に関する。
エレベーターは、昇降路の左右側面に垂直に敷設された2本のガイドレールに沿って、乗りかごを上下に昇降させる。乗り心地をよくするために、ガイドレールは基準の直線に沿って精度良く位置決めされて昇降路に据え付けられる。各階には、エレベーターに乗り降りするための乗場ドアが設置されており、エレベーターが着床した際に、乗場ドアは乗りかごのごドアと連動して開閉される。乗場ドアとかごドアの隙間が許容範囲に収まるように、乗場ドアは精度良く位置決めされて据え付けられている。
ガイドレールと乗場ドアは設計された位置で、ブラケットによって昇降路に固定される。ブラケットはアンカーボルトによって昇降路壁面の鉄筋コンクリートに固定される。このとき、ブラケットを固定するアンカーボルトは昇降路壁面に対して垂直に打ち込まれて、ガイドレールや乗場ドアの位置を動かないように固定している。建築現場では、作業員が鉄筋を避けるために、状況によってはアンカーボルトを斜めに打ち込む例もあるが、その場合はアンカーボルトのコンクリートから露出している部分をハンマーで叩いて垂直に修正している。
従来から、昇降路内でエレベーターを自動で据え付ける装置(例えば、特許文献1)が知られている。この装置は、昇降する作業台の上に、上面を水平に調整可能な設置平面を設け、設置平面の上に作業台側面に平行な第1の直動装置を固定している。さらに、第1の直動装置の上に、90度向きを変えて第2の直動装置を固定し、穴開け工具を保持する支持機構が第2の直動装置に固定されている。
そして、ブラケットを昇降路に固定するため、あらかじめ設定された高さに作業台を移動する。次に、第1の直動装置により、穴開け工具を、アンカーボルトを打ち込む位置に移動する。次に、第2の直動装置により、穴開け工具を昇降路壁面に押し付け、アンカーボルトを打ち込むための穴を開ける。
昇降路は高さが数十メートルに及ぶため、建物の機能上に支障がない範囲で様々な方向に僅かに傾斜していることが多々ある。しかしながら、この傾斜が図面情報に含まれていないと、穴開け装置は、ガイドレールを昇降路に据え付けるための穴開けを正確に行うことができない。その場合、作業員は、昇降路の傾斜部分に対して自ら穴開けをしなければならなかった。
一方、作業員が昇降路の壁面形状を可能な限り測定してこれを3次元データに纏め、これに基づいて、穴開け装置を駆動させて、アンカーボルトを昇降路壁面に対して垂直に打ち込むことを考えられるが、アンカーボルトの取り付け位置は上下左右に移動させなければならないため、昇降路の壁面の広い範囲を測定しなければならない。これは、測定のための作業量が膨大となり現実的ではなかった。
以上のことから、昇降路にブラケットを固定するための穴開け作業は、エレベーターの据付装置を適用することが困難であった。そこで、本発明は、昇降路の壁面形状の測定データに影響されることなく、昇降路の壁面に垂直にブラケットを固定するための穴を形成することを可能とするエレベーター据付装置を提供することを目的とする。
前記目的を達成するために、本発明は、エレベーターの昇降路の壁面に穴を開ける穴開け工具と、前記穴開け工具を支持する支持機構と、を備え、前記支持機構を前記昇降路内を昇降する作業台に設けるエレベーター据付装置であって、前記穴開け工具の傾きを検出する穴開け工具傾き検出装置と、 前記穴開け工具の傾きを調整する穴開け工具傾き調整装置と、制御装置と、備え、前記穴開け工具傾き検出装置は、前記昇降路の壁面と前記穴開け工具の軸の交わる角度を検出し、前記制御装置は、前記検出された確度に基づいて、前記穴開け工具傾き調整装置によって前記穴開け工具の傾きを調整して、前記穴開け工具の軸が前記昇降路壁面に対して垂直になるように前記穴開け工具の先端を位置決めし、前記穴開け工具を前記昇降路壁面に対して垂直に押すようにした、ことを特徴とするものである。
本発明によれば、昇降路の壁面形状の測定データに影響されることなく、昇降路の壁面に垂直にブラケットを固定するための穴を形成することを可能とするエレベーター据付装置を提供することができる。
次に、図面を用いて、エレベーター据付装置の実施形態を説明する。図1に、その主要構成の斜視図を示す。エレベーター据付装置1は、穴開け工具2(電動工具)、穴開け工具2を昇降路壁面3に押し付ける第1の直動装置4(4a,4b,4c)、穴開け工具2を所定の位置に固定するように変形可能な支持機構5(5a,5b)、支持機構5の形状を変化させるための支持機構駆動モータ6(6a,6b)、支持機構5の基部を移動させる基部位置決め装置7、作業台9、作業台9の高さ位置を検出する作業台高さ検出装置42、作業台9の前後左右の位置を検出するための基準線40を与えるレーザー照射器39と作業台位置検出装置41、作業台9の傾きを検出する作業台傾き検出装置43、図面や測定等により事前に与えられた各部の位置情報および各種検出装置の情報に基づき、支持機構5の支持機構駆動モータ6(6a,6b)や基部位置決め装置7を制御する制御装置8と、を備える。符号54は反射板である。
穴開け工具2は、例えば、電動のハンマードリルであり、削りかすを吸い取る集塵ユニット10を備える。第1の直動装置4は、穴開け工具2が固定されるスライダ4bと、穴開け工具2の軸と同じ方向にスライダ4bを案内するリニアガイド4aと、スライダ4bを直進させる駆動モータ4cとを備える。
第1の直動装置4のスライダ4bにチャック11を設けて穴開け工具2を着脱可能に固定しており、ねじ締め作業を行う際には、インパクトレンチ(図示しない)に交換できるようにしている。なお、チャック11の根元に穴開け工具2の反力を検出するための、穴開け工具反力検出装置48を取り付けている。穴開け工具2は、後で説明するように、メインレールと釣り合い重りのレール(以下、「CWTレール」と記す)のブラケットを固定するために、左右方向(y軸方向)に広範囲に位置決め自在にされなければならない。そこで、支持体の基部を移動させるための、支持機構基部移動装置7が存在する。
そして、穴開け工具2を昇降路壁面3に押し当てるため、支持機構5は、水平方向に大きく変形させる必要がある。一方、上下方向(z軸方向)については、作業台9を昇降できるので、支持機構5を上下方向にそれほど大きく変形させる必要は無い。そこで、支持機構5は、水平多関節アーム5aと、上下方向(z軸方向)の第2の直動テーブル5bとを備える。
穴開け工具傾き調整装置19は、雲台17に垂直な旋回軸13Vと、水平な仰俯軸13Hを備え、旋回軸13Vは、水平多関節アーム5a先端に固定した旋回軸駆動モータ12aによって回転され、仰俯軸13Hは、雲台17に固定した仰俯軸駆動モータ16cで回転される。さらに、水平多関節アーム5aは、その先端に、旋回軸13Vの回転を固定する旋回軸固定ブレーキ12bを備える。仰俯軸13Hは、歯弧16aとウォームギヤ16bを組み合わせた機構によって回転され、セルフロック機能が仰俯軸13Hに働くため、これを固定するためのブレーキは不要である。
穴開け工具傾き調整装置19を用いて、昇降路壁面3に穴開け工具2の軸を垂直に位置決めするために、エレベーター据付装置1は、昇降路壁面3に対する穴開け工具2の傾きを検出する、穴開け工具傾き検出装置14を備える。図1は、第1の直動装置4のリニアガイド4a前面に、穴開け工具2の軸に直交する向きに配置された、水平距離を測定する2次元変位センサ(穴開け工具傾き検出装置14)を用いて、対面する昇降路壁面3との平行度を測定する。2次元変位センサは、本来、部品の断面形状を測定するものであるが、昇降路壁面3に向けて使用されることにより、昇降路の部分断面15が2次元変位センサに対してどれぐらい傾いているかを測定することができる。2次元変位センサは公知のものでよい。なお、2次元変位センサを用いない穴開け工具傾き検出装置14について、後に詳しく説明をする。
制御装置8は、穴開け工具傾き検出装置14の情報に基づき、支持機構駆動モータ6(6a,6b)、第2の直動装置5b、穴開け工具傾き調整装置19を制御して、穴開け工具2を昇降路壁面3に対して垂直に位置決めする。
なお、作業台9は、床フレーム9aと、床フレーム9aの上に張られた床9bと、作業台9側面の横フレーム9dと、を備える。さらに、作業台9は、メインレール等の据付作業後に、そのままエレベーターの床として利用するもので、床9bは養生パネル9cで覆われている。そのため、支持機構基部移動装置7は、養生パネル9cの上に載置され、横フレーム9dにボルト21を用いて固定される。後に説明するように、作業台9に設けた座標系で支持機構5の基部の位置を定義するため、横フレーム9dの所定の位置に支持機構基部移動装置7を固定する。
図1に示すエレベーター据付装置1では、支持機構基部移動装置7は、第3の直動装置700によって移動されるものであり、決まった寸法のスペーサ(図示せず)を介して横フレーム9dに固定されている。さらに、横フレーム9dと第3の直動装置700のそれぞれに印22を入れ、印22の位置を合わせてy軸方向の位置を出している。なお、印22を用いずに、フレーム9dの端と直動テーブル7aの端の寸法を測ってy軸方向の位置を出しても良い。
図2は、支持機構5の他の形態の斜視図である。支持機構5を、水平多関節アーム5aと、水平多関節アーム5aを上下方向に移動する第2の直動装置5bとによって構成し、支持機構駆動モータ6による水平多関節アーム5aの関節の駆動機能(図1)を、垂直多関節ロボット35の各関節に設けられた、多関節ロボット駆動モータの機能で代用したものである。
図1と同様に、穴開け工具2は、具体的には電動のハンマードリルで、第1の直動装置4にチャック11で着脱可能に固定されている。また、第1の直動装置4の前面に、穴開け工具傾き検出装置14を設けている。さらにまた、第1の直動装置4と水平多関節アーム5aの間に、穴開け工具傾き調整装置19が配置されている。
ここで、水平多関節アーム5aの各関節に支持機構駆動モータ6は無く、支持機構関節固定ブレーキ49b(図1)のみ取り付ける。また、穴開け工具2の上面に、垂直多関節ロボット35の先端に取り付けた回転型手先効果器(例えば多角形断面の回転軸)50を接続する結合口52を設ける。結合口52は、回転型手先効果器50を挿入することのできる小穴(例えば多角形断面の穴)で、小穴の底に結合口スイッチ55を設けて、回転型手先効果器50が穴開け工具2に接続された状態を検知する。
制御装置8は、穴開け工具傾き検出装置14の情報に基づき、多関節ロボット駆動モータ46、第2の直動装置5b、穴開け工具傾き調整装置19を制御して、穴開け工具2を昇降路壁面3に対して垂直に位置決めする。このとき、垂直多関節ロボット35先端の回転型手先効果器50の回転角度を制御し、これを穴開け工具2上面の結合口52に差し込み、穴開け工具2のz軸周りの回転角度を調節する。また、その状態で、多関節ロボット駆動モータ46を制御して垂直多関節ロボット35先端の回転型手先効果器50を並進移動させ、穴開け工具2のxy方向の位置決めを行う。このとき、穴開け工具2の旋回軸13Vの回転角度も調整できるため、旋回軸駆動モータ12aは不要で、旋回軸固定ブレーキ12bのみあれば良い。
なお、結合口54の位置を検出するために、垂直多関節ロボット35の先端部に手先カメラ44が取り付けられている。制御装置8は、手先カメラ44により撮像したデータを画像処理して、結合口54の傾きも検出し、垂直多関節ロボット35を制御して回転型手先効果器50を結合口54に接続できるようにする。
図3に、本発明が対象とする、ガイドレール芯出し固定作業時の、昇降路23内部の透視図を示す。ガイドレール24は、メインレール24aとCWTレール24bとからなり、これらレールは、継板25で連結されて昇降路23に立てられており、最下段のレール24a1は位置決めされた状態でピット26のベース27に固定され、1段目のブラケット281で昇降路に固定されている。なお、(L)は左側を意味し、(R)は右側を意味する。説明を簡潔にするために、(L)と(R)との区別をせずに符号を引用することがある。24an等の「n」はn段目を意味する。さらに、「a」はメインレールに係る構成であることを示し、「b」はCWTレールに係る構成を示す。
ブラケット28は大小2つの部品から成り、大ブラケット28Lは、昇降路に打ち込まれたアンカーボルト18で固定される。小ブラケット28Sは、位置決めされたガイドレール24に沿わせた状態で大ブラケット28Lの上に載せ、その位置で小ブラケット28Sにガイドレール24を固定し、大ブラケット28Lに小ブラケット28Sを固定することで、ガイドレール24を昇降路23に固定している。最上段のレール24anは、頂部の梁29(29L,29R)に、ワイヤ30a(30a(L),30a(R))で仮固定されている。
作業台9は2本のワイヤロープ31(31L,32R)で作業台昇降装置(揚重機)32(32L,32R)に吊られ、作業台9の下部に配置されたガイドシュー33(図3には33Rのみが図示されている。)により、メインレール24a(24a(L),24a(R))に沿って昇降する。
作業台9の中央部には、台車34(34F:フロント、34R:リアー)に登載された垂直多関節ロボット35(35F:フロント、35R:リアー)が2台配置される。ブラケット28を把持して昇降路壁面3の所定の位置に保持する作業と、ブラケット28を固定するためのねじを締める作業は同時に行う必要があるため、2台の垂直多関節ロボット35(F)、35(R)を用いる。最初に昇降路23にエレベーター据付装置1を導入するときに、作業員は台車34を押して作業台9の適当な位置に移動し、ストッパ36で作業台9の上に固定する。先に説明の通り、垂直多関節ロボット35は支持機構5の支持機構駆動モータ6(図1)を兼ねている。
上記2台の垂直多関節ロボット35の間に、メインレール24aの芯出し雇37aを受ける台が配置されている。メインレール24aの芯出し雇37aは昇降路23に固定されており、レール芯出し雇37aによるガイドレール24aの位置決め動作を終えた時点で、作業台9は下降して垂直多関節ロボット35の動作領域を確保する。
なお、CWTレール24bの芯出し雇37bは、CWTレール24bを把持した状態で作業台9の上方に退避してある。メインレール24aとCWTレール24bの芯出し雇37a、37bによる作業内容については、本発明に直接関係しないので説明を省略する。
ガイドレール24を固定する昇降路壁面3に対面する位置に、穴開け工具2を所定の位置に固定する支持機構5が配置される。先に説明した通り、支持機構5は、作業台9に固定された支持機構基部移動装置7により、昇降路23の前後方向(y軸方向)に移動できる。
ここで、作業台9に載せることのできる装置の重量には制限があり、30kg〜80kgの垂直多関節ロボット35を用いる。このサイズのロボットはモータを大型化できないため可搬重量が10〜20kg程度と小さく、穴開け工具2を200N程度の力で昇降路壁面3に押し付ける作業を行うことは困難である。そこで、本発明の対象とする穴開け作業においては、支持機構5を用いて穴開け工具2を所定の位置に保持し、第1の直動装置4で穴開け工具2を昇降路壁面3に押し付けることで、穴開け作業を行う。
昇降路23の頂部にレーザー照射器39を固定し、鉛直の基準線40を設定する。図3では、メインレール24aの近傍と、出入り口の近傍に、基準線40(前者40R、後者が40Dであり、前者用のレーザー照射器39が39Rであり、後者用のレーザー照射器が39Dである。)を設定した例を示す。
メインレール24a近傍の基準線40Rは、レール芯出し雇37aによるガイドレール24aの位置決めに使用する。出入り口近傍の基準線40Dは、作業台9の前後方向と左右方向の位置を検出するために用いる。そのため、作業台9の出入り口近傍に作業台位置検出装置41D(例えばレーザースポット位置センサを用いる)を配置する。
さらに、作業台9の高さ方向の位置を検出するために、作業台高さ検出装置42(例えばレーザー距離計を用いる)を昇降路23頂部に設置し、作業台9の床面と同じ高さに置かれた反射板54までの距離を測定する。なお、符号27(27a,27b)はガイドレールの下端部に結合するベースである。
次に、図1において、制御装置8がどのような装置から情報を得て、どのような装置をどのように制御するかを説明する。図4に、図1によるエレベーター据付装置の全体構成を表すブロック図の一例を示す。図1において、支持機構駆動モータ6は、支持機構5に設けられている各関節のモータが該当する。なお、支持機構5を水平多関節のタイプに限定しない。また、制御装置8は、あらかじめ、支持機構基部位置決め装置7を制御して、支持機構5がブラケット28(図3)を取り付ける位置の穴開け作業ができるように支持機構5の基部を移動しているものとする。以下に、制御装置8が行う処理を説明する。
制御装置8は、昇降路23に設置された作業台高さ検出装置42の情報に基づき、作業台昇降装置32を制御して、作業台9を、ブラケット28を取り付ける高さに昇降する。制御装置8は、作業台9に設けられた作業台置検出装置41Dと作業台傾き検出装置43により、昇降路23における作業台の位置および傾きを計算する。
制御装置8は、あらかじめ設定した穴開け工具2先端の目標位置の情報と、作業台高さ検出装置42の情報と、作業台位置検出装置41Dの情報と、作業台傾き検出装置43の情報と、穴開け工具傾き検出装置14の情報と、支持機構形状検出装置53(例えば支持機構5の各関節に設けられたエンコーダなどを用いる)の情報に基づき、支持機構5の第2の直動装置5bと、支持機構駆動モータ6と、穴開け工具傾き調整装置19の旋回軸駆動モータ12aおよび仰俯軸駆動モータ16cを制御し、穴開け工具2の先端を昇降路23の所定の位置に、昇降路壁面3に対して垂直に位置決めする。
支持機構形状検出装置53は支持機構5の各関節に設けられたエンコーダの他、穴開け工具傾き調整装置19の旋回軸13Vおよび仰俯軸13Hの角度を検出するエンコーダ、第2の直動装置5bの移動量を検出するエンコーダ等を含む。制御装置8は、これらの角度情報と各部の位置および寸法の情報より、穴開け工具2の位置を計算する。
制御装置8は、支持機構5の各関節に設けられた支持機構駆動モータ6を制御して、穴開け工具2の位置決めを終了したら、その位置を保持するように、旋回軸固定ブレーキ、支持機構関節固定ブレーキ49を作動させる。第2の直動装置5bは、セルフロック機能が働きブレーキは不要である。
制御装置8は、穴開け工具反力検出装置48の情報により、穴開け工具2が昇降路壁面3に接触したことを検知し、第1の直動装置4を制御して所定の深さに穴を開ける。
次に、図2において、制御装置8がどのような装置からどのような情報を得て、装置をどのような制御を行うかについて説明する。図5に、そのためのエレベーター据付装置の全体構成を表すブロック図の一例を示す。垂直多関節ロボット35の多関節ロボット駆動モータ46が支持機構駆動モータ6の役割を兼ねる。また、垂直多関節ロボット35の各関節には、多関節ロボット形状検出装置45として、エンコーダが設けられている。
垂直多関節ロボット35の先端部には、手先カメラ44と回転型手先効果器50と手先反力検出装置51が設けられる。また、後で説明するように、回転型手先効果器50を穴開け工具2に接続するための結合口55が、穴開け工具2に設けられ、接続状態を検出する結合口スイッチ55が設けられる。なお、図2においては、支持機構形状検出装置53、支持機構駆動モータ6は不要である。さらに、後で説明するように、穴開け工具傾き調整装置19の旋回軸駆動モータ12aも不要である。
制御装置8は、あらかじめ、支持機構基部位置決め装置7を制御して、支持機構5がブラケット28を取り付ける位置の穴開け作業ができるように支持機構5の基部を移動しているものとする。また、制御装置8は、あらかじめ、作業台9における垂直多関節ロボット35の位置を把握しているものとする。
図1と同様に、制御装置8は、昇降路23に設置された作業台高さ検出装置42の情報に基づき、作業台昇降装置32を制御して、作業台9を、ブラケット28を取り付ける高さに昇降する。また、制御装置8は、作業台9に設けられた作業台置検出装置41Dと作業台傾き検出装置43により、昇降路23における作業台の位置および傾きを計算する。
制御装置8は、あらかじめ設定した穴開け工具2先端の目標位置の情報と、作業台高さ検出装置42の情報と、作業台位置検出装置41Dの情報と、作業台傾き検出装置43の情報と、穴開け工具傾き検出装置14の情報と、多関節ロボット形状検出装置45の情報に基づき、支持機構5の第2の直動装置5bと、多関節ロボット駆動モータ46と、回転型手先効果器50と、穴開け工具傾き調整装置19の仰俯軸駆動モータ16cを制御し、穴開け工具2の先端を昇降路23の所定の位置に、昇降路壁面3に対して垂直に位置決めする。
制御装置8は、垂直多関節ロボット35の先端部に取り付けた回転型手先効果器50を穴開け工具2の表面に設けられた結合口52に接続し、穴開け工具2を位置決めする。このとき、制御装置8は、支持機構関節固定ブレーキ49と、穴開け工具傾き調整装置19の旋回軸固定ブレーキ12bを制御することにより、垂直多関節ロボット35によって水平多関節アーム5の形状が変化するようにしたり、水平多関節アーム5の形状が変化しないように固定したりする。
制御装置8は、手先カメラ44により穴開け工具2に設けられた結合口52の位置と傾きを検出し、回転型手先効果器50を穴開け工具2の結合口52に接続する。このとき、制御装置8は結合口スイッチ55の情報により、回転型手先効果器50と穴開け工具2の結合状態を確認する。
制御装置8により、支持機構5の第2の直動装置5bおよび穴開け工具傾き調整装置19の仰俯軸駆動モータ16cを駆動するときに、穴開け工具2に接続されている回転型手先効果器50が穴開け工具2より受ける外力を、手先反力検出装置51により検出する。このとき、制御装置8は、穴開け工具2より受ける外力に倣って、回転型手先効果器50の位置を移動する制御を行う。
制御装置8は、支持機構5の穴開け工具反力検出装置48の情報により、穴開け工具2が昇降路壁面3に接触したことを検知し、第1の直動装置4を制御して所定の深さに穴を開ける。
制御装置8は、マイコンによって構成されてよい。制御装置8は、コントローラ、メモリ等のハードウェア資源と、メモリ内のプログラムなどのソフトウェア資源とを備え、コントローラがメモリのプログラムを実行して既述の処理を実現する。フローチャートの各ステップは、手段、機能、モジュールとして分類されてもよい。メモリはプログラムを記録する非一時的記録媒体としても理解されてよい。
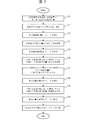
図6は、穴開け作業に関連する、レール芯出し固定作業の手順の一例を示すフローチャートである。最下段のレール241は作業員が芯出し固定を行い、既に1段目のブラケット281は取り付けてある。エレベーター据付装置は、2段目以上のブラケット28を固定する作業を実行する。
まず、ステップ101において、作業台9の高さ位置を検出し、ステップ102でブラケット28取付位置まで作業台9を昇降させる。次のステップ103では、レール芯出し雇37を用いて、レール24の位置決め作業を行う。この作業はエレベーター据付装置の対象ではないので、作業員が行うものである。作業員は、レール芯出し雇位置検出装置41Gにより基準線40Rとガイドレール24の相対位置を確認しながら、精度良くガイドレール24を位置決めし、その位置からガイドレール24が動かないように、単管等でレール芯出し雇37を昇降路23に固定する。
次のステップ104から107は、エレベーター据付装置の穴開け作業である。まず、エレベーター据付装置は、ステップ104にて作業台9の位置および傾きを検出する。具体的には、昇降路23の頂部に設置した作業台高さ検出装置42が、作業台9の床面までの距離Lを測定する。制御装置8は、作業台9が基準位置H0の高さにあるときに測定した距離L0とLの差をH0に加算して、昇降路23における作業台9のz座標を求める。作業台の傾きは、作業台9に設置した傾斜センサによって直接測定されればよい。
次のステップ105において、支持機構基部移動装置7が、支持機構5基部を穴開け作業のできる位置に移動する。次のステップ106は、支持機構駆動モータ6または多関節ロボット駆動モータおよび穴開け工具傾き調整装置19を制御して、穴開け工具2の位置決めを行う。制御装置8は、所定の位置で、昇降路壁面3に対して穴開け工具2の軸が垂直になるように、穴開け工具2を位置決めする。
穴開け工具2の位置決めが終わったなら、ステップ107において、穴開け工具2は穴開けを行う。ステップ108において、エレベーター据付装置は、ブラケット28の固定に使用するアンカーボルト用の穴開けがすべて終了するまで、ステップ104からステップ107を繰り返す。ブラケット28の固定に使用するアンカーボルト18の穴開けがすべて終了したら、ステップ109に進む。
ステップ109の前半では、アンカーボルト18の芯の部分がステップ107で開けた穴に打ち込まれ、昇降路壁面3に大ブラケット28Lの上面が水平になるように昇降路23に固定される。
さらに、ステップ109の後半では、大ブラケット28Lの上に小ブラケット28Sが載せられ、小ブラケット28Sにレールクリップでガイドレール24が固定される。次に、大ブラケット28Lと小ブラケット28Sとがボルトとナットで一体に固定されることにより、ガイドレール24が昇降路23に固定される。継板25で連結されているすべてのガイドレール24がブラケット28で昇降路23に固定されるまで、ステップ101からステップ109が繰り返えされ、昇降路23のピット26から頂部にかけて、ガイドレール24の位置決めと固定が行われる。
図7は、エレベーター据付装置の穴開け工具2の位置決め作業の手順の一例を示したフローチャートである。特に、図2では、制御装置8は、垂直多関節ロボット35を制御して、穴開け工具2を所定の位置に移動し、昇降路壁面3に対して穴開け工具2の軸が垂直になるように、位置決めする。前提条件として、作業前に、水平多関節アーム5aは初期形状(あらかじめ定められた関節角度の状態)になっており、水平多関節アーム5aの関節に設けられたブレーキ49は作動しているものとする。
まず、ステップ201において、制御装置8は、支持機構基部移動装置7および第2の直動装置5bの移動量より、水平多関節アーム5a基部の位置を計算し、水平多関節アーム5aの先に固定されている穴開け工具2の場所を推定する。水平多関節アーム5aは作業前にあらかじめ定められた初期形状になっているため、水平多関節アーム5a基部の位置が分かれば水平多関節アーム5a先端の穴開け工具2の位置を推定できる。なお、垂直多関節ロボット35先端の手先カメラ44により、穴開け工具2上面の結合口52を認識し、その位置を検出しても良い。
次に、ステップ202において、回転型手先効果器50が穴開け工具2の結合口52に結合される。結合口52に備えられた結合口スイッチ55が、回転型手先効果器50との結合を検出すると、ステップ203において、支持機構関節固定ブレーキ49が解除される。
次に、ステップ204において、制御装置8は、各部の位置情報に基づき、垂直多関節ロボット35を制御して回転型手先効果器50の位置を移動し、所定の位置に穴開け工具2を移動する。穴開け工具2の位置が確定したら、ステップ205において、制御装置8は再び支持機構関節固定ブレーキ49を作動する。
次に、ステップ206において、制御装置8は、穴開け工具傾き検出装置14の情報に基づき、穴開け工具傾き調整装置19の仰俯軸駆動モータ16cを制御し、仰俯軸13Hの仰俯角を調整する。これにより穴開け工具2の先端の高さが変化するため、ステップ207において、制御装置8は第2の直動装置5bを制御して穴開け工具2の先端の位置を補正する。
次に、ステップ208において、制御装置8は、支持機構関節固定ブレーキ49を解除する。次に、ステップ209において、制御装置8は、穴開け工具傾き検出装置14の情報に基づき、回転型手先効果器50を制御して、旋回軸13Hの旋回角を調整する。このとき、穴開け工具2は旋回軸13V周りに回転するため、穴開け工具2の先端は左右に位置が変化する。そのため、制御装置8は、回転型手先効果器50を回転させるだけでなく、垂直多関節ロボット35を制御しながら回転型手先効果器50を左右方向にも並進移動させて、穴開け工具2の先端を昇降路壁面3の所定の位置に補正する。
なお、図2のように、支持機構5に水平多関節アーム5aを用いると、穴開け工具2の重力の影響を受けずに、穴開け工具2を左右方向、前後方向に動かすことができ、作業台9に乗せることのできる軽量な垂直多関節ロボット35を用いても、穴開け作業を実施できる。
以上により、穴開け工具2の位置および姿勢の位置決めが成され、その位置と姿勢を保持するために、制御装置8は、ステップ210において、支持機構関節固定ブレーキ49を作動する。なお、制御装置8は、次に穴開け作業を行う前に、垂直多関節ロボット35を動かし回転型手先効果器50が穴開け工具2の結合口52から離れるようにしておく。これは、穴開け時の穴開け工具2の振動が、垂直多関節ロボット35に直接伝わって、ロボットが故障するのを避けるためである。
次に、昇降路の所定の位置に穴開け工具2を移動し、昇降路壁面3に対して穴開け工具2の軸を垂直に位置決めする方法について、図8を用いて説明する。図8は、昇降路23の断面と作業台9、垂直多関節ロボット35(および台車34)、水平多関節アーム5b、穴開け工具2の位置関係を示す、平面図である。
制御装置8は、昇降路23に設定した座標系OS(例えばピット26床面の中央に原点を設定する)、作業台9に設定した座標系OW(例えば作業台9床面の中央に原点を設定する)、垂直多関節ロボット35に設定した座標系OD(例えば垂直多関節ロボット35の基部に原点を設定する)を用いて、各部の位置を計算し、穴開け工具2の先端Rを昇降路23の所定の位置に移動する。
制御装置8は、昇降路の座標系OSにおける作業台9の高さzWを、先に説明した通り、作業台高さ検出装置42の検出結果より求める。制御装置8は、作業台9のx軸周りとy軸周りの傾きは、作業台9に設置した2軸の傾斜センサ43により、直接測定する。以下、作業台9に配置した作業台位置検出装置41Dの情報より、昇降路23に設定した座標系OSにおける、作業台9の座標(xW、yW)とz軸周りの回転角度θを、制御装置8が、求める方法について説明する。なお、説明を簡略にするため、作業台のx軸周りの傾斜角とy軸周りの傾斜角を無視して、2次元の座標変換の例を説明する。
作業台9に取り付けた作業床位置検出装置41Dは、例えば作業台9の原点OWからAだけ離れた前面の、左右2箇所に所定の間隔Bで取り付けられたレーザースポット位置センサ41D(L)、41D(R)である。作業台9が昇降路の芯にあり、作業台9の座標系OWが昇降路23の座標系OSに重なる初期位置で、それぞれのレーザースポット位置センサ41D(各センサの座標系はOP1、OP2)で、基準線40DのレーザースポットP1,P2の座標は(0、0)、(0、0)になるものとする。
図8において、作業台9が初期位置からずれて、それぞれのレーザースポット位置センサ41Dによって、基準線40DのレーザースポットP1,P2の座標が(x1、y1)、(x2、y2)になったとする。まず、昇降路23の座標系OSにおいて、作業台9の座標系OWのz軸周りの回転角度θは、次式で計算できる。図8の例では、z軸は紙面の上方を向いているのでθは負の値になる。
また、昇降路23の座標系OSにおける作業台9の座標系OWの原点を(xW、yW)とおくと、左のレーザースポット位置センサ41D(L)が検出するレーザースポットP1の位置x1、y1は、それぞれ、次式により求められる。
よって、制御装置8が、式2と式3の連立方程式を解けば、昇降路23の座標系OSにおける、作業台9の座標(xW、yW)を求めることができる。
以上により、昇降路23の座標系OSと作業台9の座標系OWの相対的な位置関係が分かるので、座標変換により昇降路23に設定した目標位置を、作業台9の座標系OWで示すことができる。
次に、作業台9の座標系OWにおける、垂直多関節ロボット35基部に設定した座標系ODの原点の位置(xD、yD)とz軸周りの回転角度φを求める方法について説明する。
制御装置8は、垂直多関節ロボット35の関節を動かしながら、垂直多関節ロボット35に取り付けた手先カメラ44で作業台9上の特徴点(例えば作業台9側面の両端の角Q1,Q2)を探索し、多関節ロボット形状検出装置45の情報により、作業台9と垂直多関節ロボット35の相対位置および姿勢を推定する。ただし、制御装置8は、垂直多関節ロボット35の手先は作業台9に対して常に垂直下向き(−z方向)になるように制御するものとする。これは、作業台9の特徴点Q1,Q2を手先カメラ44の直下に検出するためである。
作業台の原点OWからCだけ離れた作業台9後部に、作業台9の幅寸法Dだけ離れた2点Q1,Q2を、垂直多関節ロボット35の手先カメラ44により測定したときの座標が(x1、y1)、(x2、y2)だったとする。まず、作業台9の座標系OWにおいて、垂直多関節ロボット35の座標系ODのz軸周りの回転角度φは、次式で計算できる。図8の例では、φは正の値になる。
また、作業台9の座標系OWにおける垂直多関節ロボット35の座標系ODの原点を、(xD、yD)とおくと、手先カメラ44により検出した右後方の点Q2の位置x2、y2は、先に求めたφを用いて、それぞれ、次式で求められる。
よって、制御装置8が上記2式の連立方程式を解けば、作業台9の座標系OWにおける、垂直多関節ロボット35の座標系ODの原点(xD、yD)を求めることができる。垂直多関節ロボット35の関節角度より、垂直多関節ロボット35の座標系ODにおける手先の位置を計算できるので、垂直多関節ロボット35の座標系ODから作業台9の座標系OWに変換すれば、作業台9の座標系OWにより、垂直多関節ロボット35の先端の位置を定義できる。
さらに、昇降路23の座標系OSに座標変換すれば、昇降路23の座標系OSにより、垂直多関節ロボット35の先端の位置を定義できる。逆向きに座標変換すれば、昇降路23に設定した目標位置を、垂直多関節ロボット35の座標系ODで示すことができる。よって、制御装置8は、垂直多関節ロボット35の先端部に取り付けられた回転型手先効果器50の位置決めを行い、穴開け工具2の先端Rを昇降路23の所定の位置に、所定の向きで位置決めできる。
なお、制御装置8は、垂直多関節ロボット35先端部の手先カメラ44により、穴開け工具2の特徴点(例えば穴開け工具2の結合口52の形状)を探索し、穴開け工具2の相対位置および軸の向きを検出する。
また、支持機構基部移動装置7は、作業台9の側面の横フレーム9dに押し当てて設置することで作業台9の所定の位置に固定できる。よって、制御装置8は、支持機構基部移動装置7の移動量を検出することにより、作業台9に設定した座標系OWで支持機構5基部の位置を求めることができる。
さらに、図1のように、支持機構5に支持機構駆動モータ6が設けられている場合は、支持機構5の基部にも座標系OHを設定して、支持機構駆動モータ6により支持機構5の各関節角度を制御して穴開け工具2の先端Rを所定の位置に所定の向きに位置決めできる。
以上により、制御装置8は、昇降路23の所定の位置に穴開け工具2の先端Rを位置決めすることができる。しかし、実際の昇降路23の形状により、実際の昇降路壁面3’は破線に示すようにγだけ傾いている場合がある。そこで、制御装置8が、穴開け工具2を、傾いた昇降路壁面3’に対して垂直に位置決めする方法について説明する。
制御装置8は穴開け工具傾き検出装置14により、昇降路壁面3’に対する穴開け工具2の軸の傾きγを求めることができる。よって、回転型手先効果器50をγだけ回転して穴開け工具2を昇降路壁面3に対して垂直にすることができる。さらに、垂直多関節ロボット35の先端部を、作業台9の座標系OWにおいてΔx、Δyだけ動かして、穴開け工具2の先端Rを所定の位置に位置決めする。穴開け工具2の先端から回転型手先効果器50が接続されている穴開け工具2の結合口52までの長さをLTとすると、次式の通りである。
図9は、穴開け工具傾き検出装置14(図2)の具体的な構成を表す、斜視図である。第1の直動装置上の3点に変位センサ14a,14b、14cが取り付けられている。3点のうち、2つの変位センサ14a、14bは、雲台17の仰俯軸13Hに平行な直線上に配置され、それぞれ第1の直動装置4の軸から等距離に配置される。残り1つの変位センサ14cは、2つの変位センサ14a、14bの中心を通り第1の直動装置4の軸に垂直に交わる直線上に配置される。
制御装置8は、第1の直動装置4を昇降路壁面3に向けて変位センサ14a〜14cにより距離を測定し、最初に左右の変位センサ14a、14bの検出値を比較し、等距離になるように旋回軸13Vの回転角度を調節する。このとき、垂直多関節ロボット35先端の回転型手先効果器50は、穴開け工具2の結合口52を操作して、左右に旋回動作させる。
次に、制御装置8は、左右いずれかの変位センサ(14aまたは14b)の検出値と、残りの変位センサ14cの検出値を比較し、等距離になるように仰俯軸13Hの回転角度を調節する。このような変位センサ14a〜14cによる穴開け工具傾き検出装置14は、高価な2次元変位センサを用いるよりも、安価に構成することができる。
図9の3つの変位センサのうち、左右の変位センサ14a、14bを取り除き、残り1つの変位センサ14cのみで、穴開け工具傾き検出装置14を構成することもできる。先の例同様に、最初に回転型手先効果器50が穴開け工具2を旋回動作させて、検出距離が最短になるように旋回軸13Vの回転角度を調整する。次に、仰俯軸駆動モータ16cが、穴開け工具2を仰俯動作させて、検出距離が最短になるように仰俯軸13Hの回転角度を調整する。このような変位センサ14cのみによる穴開け工具傾き検出装置14は、センサ数が最小の構成となり最も安価にできる。
図10は、3つの変位センサ14a〜14cにより穴開け工具傾き検出装置14を構成する場合に、旋回軸13Vの回転角度γを求める具体例を示す。穴開け工具2の傾きを調整する前は、制御装置8は仮想的な昇降路壁面3に対して、穴開け工具2を垂直にして先端Rを位置決めしている。このときの穴開け工具2の軸と、それに重なる第1の直動装置4の軸を、図10に一点鎖線で示す。図10に示す通り、2つのセンサ14a、14bで測定した距離がL1,L2で、2つのセンサ14a、14bの間隔がEのとき、昇降路壁面3’と第1の直動装置4の軸が成す角γは、次式の通りである。
図11は、1つの変位センサ14cにより穴開け工具傾き検出装置14を構成する場合の、旋回軸13Vの回転角度γを求める例を示す。図11に示す通り、傾き調整前の穴開け工具2の軸(図中、一点鎖線で示す)を中心に、所定の操作角度±ψで旋回動作させる。なお、センサ14cと結合口52は重なる位置に配置されるものとし、センサ14cと結合口52の位置のオフセットは無いものとする。
旋回角度が±ψの2点で測定した距離がL1,L2のとき、変位センサ14cと昇降路壁面3’までの距離が最短となる垂線adに重なるように、穴開け工具2の軸を調整する。直線adの長さをhと置き、垂線adと線分abの成す角をψ1と置くと、検出距離L1、L2と、h、ψ、ψ1の間に次の関係が成り立つ。なお、実際の昇降路壁面3’に対して、符号3は、仮想的な昇降路壁を表している。仮想的な昇降路壁とは、傾き修正前に、穴あけ工具が想定していた昇降路の壁面のことである。
よって、昇降路壁面3’と第1の直動装置の軸が成す角ψ1は、上記の2式の連立方程式を解いて、次式に示す通りである。

したがって、制御装置8は、変位センサ14cにより測定した距離L1,L2と、測定時の首振り角度ψの情報を用いて、昇降路壁面3’と穴開け工具2の軸が成す角γを、ψ1−ψとして、求めることができる。制御装置8は、穴開け工具傾き調整装置19の旋回軸13Vを角度γだけ回転するように制御する(図11の場合は反時計回りの方向に回す)。このとき、穴開け工具2先端の位置Rがずれるので、穴開け工具2をrsinψだけ並進移動して位置を補正する(図11の場合は上向きに並進移動)。ただし、rは点Rと点aを結ぶ直線Raの長さである。このとき、昇降路壁3’と穴開け工具Rの距離は、補正する必要がない。なお、穴開け工具2の軸の仰俯角の調整角度も、同様にして求めればよい。
なお、本発明は上述した実施の形態に限定されるものではなく、様々な変形例が含まれる。例えば、上述した実施の形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施の形態の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施の形態の構成に他の実施の形態の構成を加えることも可能である。また各実施の形態の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
本発明は、エレベーター据付装置に広く適用することができる。
1・・・エレベーター据付装置、2・・・穴開け工具(電動工具)、3・・・昇降路壁面、4・・・第1の直動装置、5・・・支持機構、6・・・支持機構駆動モータ、7・・・支持機構基部移動装置、8・・・制御装置、9・・・作業台、10・・・集塵ユニット、11・・・チャック、12a・・・旋回軸駆動モータ、12b・・・旋回軸固定ブレーキ、13V・・・旋回軸(垂直軸)、13H・・・仰俯軸(水平軸)、14・・・穴開け工具傾き検出装置、15・・・昇降路の部分断面、16a・・・歯弧、16b・・・ウォームギヤ、16c・・・仰俯軸駆動モータ、17・・・雲台、18・・・アンカーボルト、19・・・穴開け工具傾き調整装置、21・・・ボルト、22・・・印(位置合わせ用刻印)、23・・・昇降路、24・・・ガイドレール、25・・・継板、26・・・ピット、27・・・ベース、28・・・ブラケット、29・・・梁、30・・・ワイヤ、31・・・ワイヤロープ、32・・・作業台昇降装置、33・・・ガイドシュー、34・・・台車、35・・・垂直多関節ロボット(多関節ロボット)、36・・・ストッパ、37・・・レール芯出し雇、38・・・台、39・・・レーザー照射器、40・・・基準線、41D・・・作業台位置検出装置、42・・・作業台高さ検出装置、43・・・作業台傾き検出装置、44・・・手先カメラ、45・・・多関節ロボット形状検出装置、46・・・多関節ロボット駆動モータ、48・・・穴開け工具反力検出装置、49・・・支持機構関節固定ブレーキ、50・・・回転型手先効果器、51・・・手先反力検出装置、52・・・結合口、53・・・支持機構形状検出装置、54・・・反射板、55・・・結合口スイッチ
Claims (9)
- エレベーターの昇降路の壁面に穴を開ける穴開け工具と、
前記穴開け工具を支持する支持機構と、
を備え、
前記支持機構を前記昇降路内を昇降する作業台に設けるエレベーター据付装置であって、
前記穴開け工具の傾きを検出する穴開け工具傾き検出装置と、
前記穴開け工具の傾きを調整する穴開け工具傾き調整装置と、
制御装置と、
備え、
前記穴開け工具傾き検出装置は、前記昇降路の壁面と前記穴開け工具の軸の交わる角度を検出し、
前記制御装置は、前記検出された角度に基づいて、前記穴開け工具傾き調整装置によって前記穴開け工具の傾きを調整して、前記穴開け工具の軸が前記昇降路の壁面に対して垂直になるように前記穴開け工具の先端を位置決めし、前記穴開け工具を前記昇降路の壁面に対して垂直に押すようにした、
エレベーター据付装置。 - 前記支持機構は、前記穴開け工具を所定の位置に移動して支持する可変構造を備え、
前記支持機構を変形させるための支持機構駆動モータと、
前記穴開け工具をその軸の向きに押し出す直動装置と、
を備え、
前記制御装置は、
前記穴開け工具先端の目標位置の情報に基づいて、前記支持機構駆動モータと前記穴開け工具傾き調整装置を制御することにより、前記穴開け工具の先端を所定の位置で前記昇降路壁面に対して位置決めし、前記直動装置を制御して前記穴開け工具を前記昇降路壁面に対して押し出すようにした、
請求項1記載のエレベーター据付装置。 - 前記昇降路における前記作業台の高さを検出する作業台高さ検出装置と、
前記昇降路における前記作業台の前後左右の位置を検出する作業台位置検出装置と、
前記作業台の傾斜角度を検出する作業台傾き検出装置と、を備え、
前記制御装置は、
前記作業台高さ検出装置の検出値と、
前記作業台位置検出装置の検出値と、
前記作業台傾き検出装置の検出値と、
に基づいて、
前記支持機構駆動モータと前記穴開け工具傾き調整装置を制御する、
請求項2記載のエレベーター据付装置。 - 前記穴開け工具傾き調整装置は、前記直動装置の旋回角と仰俯角とを調整する2軸を有し、
前記穴開け工具傾き検出装置は、前記直動装置の直進方向に向けて前記直動装置または前記穴開け工具に固定された変位センサを備え、
前記制御装置は、前記変位センサにより測定された複数点の対面する前記昇降路の壁面との距離情報の差が所定の範囲内になるように、前記穴開け工具傾き調整装置の前記2軸の回転角度を制御する、
請求項2記載のエレベーター据付装置。 - 前記制御装置は、
前記2軸を所定の操作角度で動かして前記変位センサにより測定された対面する昇降路の壁面との距離情報と、前記2軸の操作角度の情報と、に基づき、前記2軸の回転角度を決定し、
当該決定された回転角度に基づいて、前記穴開け工具傾き調整装置を制御して、前記昇降路の壁面に対して前記穴開け工具の軸を垂直に位置決めするようにした、
請求項4記載のエレベーター据付装置。 - 前記変位センサは、前記2軸のどちらか1方の軸に平行な第1の直線の2点または1点と、前記第1の直線を通り前記直動装置の軸に直角に交わる第2の直線の1点または2点と、の合計の3点に配置され、
前記制御装置は、前記3つの変位センサの位置関係と、前記3点で測定された距離の情報に基づき、前記2軸の回転角度を決定する
請求項4記載のエレベーター据付装置。 - 前記支持機構は、各関節に関節固定ブレーキを備える水平多関節アームと、前記水平多関節アームの上下位置を調整する直動装置と、を備えて構成され、
前記水平多関節アームは、前記支持機構駆動モータとして、前記水平多関節アームの関節を動かす、多関節ロボットの各関節に設けられた多関節ロボット駆動モータに変形され、
前記穴開け工具傾き調整装置の旋回軸は軸芯および前記軸芯の回転を固定する旋回軸固定ブレーキを備え、前記旋回軸の軸芯は前記水平多関節アームの先端に設けられた垂直な軸受けに挿入され、
前記旋回軸固定ブレーキは前記水平多関節アーム先端に固定され、
前記穴開け工具の表面に前記多関節ロボットの先端に取り付けられた回転型手先効果器に接続される結合口を備え、
前記制御装置は、
前記多関節ロボット駆動モータを制御して前記結合口に前記回転型手先効果器を接続し、
前記穴開け工具傾き調整装置の旋回軸固定ブレーキおよび前記水平多関節アームの関節固定ブレーキを解除し、さらに、
前記多関節ロボット駆動モータおよび前記回転型手先効果器の回転角度を制御して前記回転型手先効果器の並進移動と回転動作に追従して前記穴開け工具傾き調整装置の旋回軸および前記水平多関節アームの関節が動くようにする、
請求項4記載のエレベーター据付装置。 - 前記作業台は、
床フレームと、
前記床フレームの上に載せられた床と、
前記床を覆う養生パネルと、
前記床フレームの側面に配置された横フレームと、
を備え、
前記支持機構は前記作業台の横フレームの定位置に固定され、前記支持機構の基部を所定の軌道上で移動する支持機構基部移動装置に固定する、
請求項3記載のエレベーター据付装置。 - 前記可変構造は各関節にブレーキを備えた水平多関節アームを備え、
前記穴開け工具は垂直多関節ロボット先端のツールが結合される領域を備え、
前記制御装置は、前記領域に前記ツールが結合すると前記関節のブレーキを解除して、前記水平多関節アームが前記ツールの動きに追従して変形するようにした、
請求項2記載のエレベーター据付装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018129513A JP2020007095A (ja) | 2018-07-06 | 2018-07-06 | エレベーター据付装置 |
| CN201910568060.6A CN110683451B (zh) | 2018-07-06 | 2019-06-27 | 电梯安装装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018129513A JP2020007095A (ja) | 2018-07-06 | 2018-07-06 | エレベーター据付装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020007095A true JP2020007095A (ja) | 2020-01-16 |
Family
ID=69108048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018129513A Pending JP2020007095A (ja) | 2018-07-06 | 2018-07-06 | エレベーター据付装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2020007095A (ja) |
| CN (1) | CN110683451B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021147118A (ja) * | 2020-03-16 | 2021-09-27 | 株式会社日立ビルシステム | レール位置決めシステム |
| JP2023032126A (ja) * | 2021-08-26 | 2023-03-09 | 株式会社日立製作所 | 作業システム |
| WO2023112828A1 (ja) * | 2021-12-15 | 2023-06-22 | 株式会社日立製作所 | 作業装置および作業装置の制御方法 |
| JP2024012816A (ja) * | 2022-07-19 | 2024-01-31 | 株式会社日立ビルシステム | 施工ロボット装置、及び、施工ロボット装置の制御方法 |
| WO2024154555A1 (ja) * | 2023-01-16 | 2024-07-25 | 株式会社日立ビルシステム | 安全作業システム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111809853A (zh) * | 2020-06-17 | 2020-10-23 | 北京中铁电梯工程有限公司 | 超高层建筑垂直电梯安装系统 |
| JP7554633B2 (ja) * | 2020-10-28 | 2024-09-20 | 株式会社日立ビルシステム | 駆動機構システム |
| CN113401767B (zh) * | 2021-07-08 | 2022-04-29 | 重庆翰洲机电设备有限公司 | 一种电梯导轨支架预装设备 |
| CN113955666A (zh) * | 2021-10-12 | 2022-01-21 | 广州明森合兴科技有限公司 | 一种作业灵活的电梯安装施工设备 |
| CN116873718B (zh) * | 2023-06-16 | 2025-09-12 | 广州明森合兴科技有限公司 | 一种电梯安装的导轨自动对接调整装置、系统及方法 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0597346A (ja) * | 1991-10-03 | 1993-04-20 | Hitachi Building Syst Eng & Service Co Ltd | 孔あけ位置設定装置 |
| JPH05229764A (ja) * | 1992-02-18 | 1993-09-07 | Hitachi Building Syst Eng & Service Co Ltd | 昇降路のアンカー穴位置決め装置 |
| US5799405A (en) * | 1995-01-31 | 1998-09-01 | C.M.F. Corporation | Vertical alignment tool for underground installation |
| JPH09110334A (ja) * | 1995-10-16 | 1997-04-28 | Hitachi Building Syst Co Ltd | レールブラケット穴あけ位置設定装置 |
| JP2000264556A (ja) * | 1999-03-18 | 2000-09-26 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ用主索の貫通孔穿設装置及び貫通孔穿設方法 |
| JP5105147B2 (ja) * | 2006-08-28 | 2012-12-19 | 株式会社安川電機 | ロボットおよび制御方法 |
| CN100596318C (zh) * | 2007-10-23 | 2010-03-31 | 武汉武大巨成加固实业有限公司 | 大体积混凝土结构深孔植筋施工方法 |
| US7886454B2 (en) * | 2008-12-31 | 2011-02-15 | Kone Corporation | Elevator hoistway installation guide systems, methods and templates |
| EP2563705B1 (de) * | 2010-04-30 | 2016-03-02 | Inventio AG | Verfahren und vorrichtung zur installation eines aufzuges in einem aufzugsschacht |
| JP5618735B2 (ja) * | 2010-09-29 | 2014-11-05 | 東芝エレベータ株式会社 | 乗客コンベア |
| EP2724970B1 (en) * | 2011-06-23 | 2015-11-18 | Mitsubishi Electric Corporation | Elevator and method for repairing elevator |
| DE202011052431U1 (de) * | 2011-12-22 | 2013-03-25 | Kuka Systems Gmbh | Bearbeitungswerkzeug |
| DE102012104993A1 (de) * | 2012-06-11 | 2013-12-12 | Thyssenkrupp Elevator Ag | Verfahren und Montagesystem zur Montage von Aufzugskomponenten |
| EP2746210A1 (de) * | 2012-12-19 | 2014-06-25 | Inventio AG | Installationsverfahren für einen Aufzug |
| CN203679343U (zh) * | 2013-12-11 | 2014-07-02 | 成都飞机工业(集团)有限责任公司 | 机器人末端制孔执行器 |
| CN104385266A (zh) * | 2014-08-28 | 2015-03-04 | 北京邮电大学 | 七自由度外骨骼式遥操作主手 |
| EP3085658B8 (en) * | 2015-04-23 | 2017-09-20 | KONE Corporation | A method and an arrangement for automatic elevator installation |
| PL3325396T3 (pl) * | 2015-07-24 | 2022-05-23 | Inventio Ag | Zautomatyzowane urządzenie montażowe do przeprowadzania instalacji w szybie dźwigowym urządzenia dźwigowego |
| CN205132820U (zh) * | 2015-11-06 | 2016-04-06 | 杭州保利电梯导轨制造有限公司 | 一种电梯导轨用轿厢导轨支架 |
| JP2018070362A (ja) * | 2016-11-02 | 2018-05-10 | 株式会社日立ビルシステム | エレベータの据付方法 |
| CN206384683U (zh) * | 2017-05-06 | 2017-08-08 | 东莞市鑫峰建筑机械有限公司 | 井道内专用施工升降机主轨支架 |
| CN107052909A (zh) * | 2017-05-23 | 2017-08-18 | 电子科技大学 | 一种钻孔垂直度监测系统 |
| CN107462881A (zh) * | 2017-07-21 | 2017-12-12 | 北京航空航天大学 | 一种激光测距传感器标定方法 |
| CN207209668U (zh) * | 2017-07-28 | 2018-04-10 | 安徽丰海起重设备制造有限公司 | 一种电梯井道式升降机导轨架 |
-
2018
- 2018-07-06 JP JP2018129513A patent/JP2020007095A/ja active Pending
-
2019
- 2019-06-27 CN CN201910568060.6A patent/CN110683451B/zh active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021147118A (ja) * | 2020-03-16 | 2021-09-27 | 株式会社日立ビルシステム | レール位置決めシステム |
| JP2023032126A (ja) * | 2021-08-26 | 2023-03-09 | 株式会社日立製作所 | 作業システム |
| JP7633903B2 (ja) | 2021-08-26 | 2025-02-20 | 株式会社日立製作所 | 作業システム |
| WO2023112828A1 (ja) * | 2021-12-15 | 2023-06-22 | 株式会社日立製作所 | 作業装置および作業装置の制御方法 |
| JP2023088461A (ja) * | 2021-12-15 | 2023-06-27 | 株式会社日立製作所 | 作業装置および作業装置の制御方法 |
| JP7684205B2 (ja) | 2021-12-15 | 2025-05-27 | 株式会社日立製作所 | 作業装置および作業装置の制御方法 |
| JP2024012816A (ja) * | 2022-07-19 | 2024-01-31 | 株式会社日立ビルシステム | 施工ロボット装置、及び、施工ロボット装置の制御方法 |
| JP7797327B2 (ja) | 2022-07-19 | 2026-01-13 | 株式会社日立ビルシステム | 施工ロボット装置、及び、施工ロボット装置の制御方法 |
| WO2024154555A1 (ja) * | 2023-01-16 | 2024-07-25 | 株式会社日立ビルシステム | 安全作業システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110683451A (zh) | 2020-01-14 |
| CN110683451B (zh) | 2021-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020007095A (ja) | エレベーター据付装置 | |
| US11945036B2 (en) | Mobile robotic drilling apparatus and method for drilling ceilings and walls | |
| US11235954B2 (en) | Alignment device and method for mounting a guide rail in an elevator shaft of an elevator system | |
| AU2016299141B2 (en) | Automated mounting device for performing assembly jobs in an elevator shaft of an elevator system | |
| US9561938B2 (en) | Method and an arrangement for automatic elevator installation | |
| US11167956B2 (en) | Method for mounting and alignment device for aligning a guide rail of an elevator system | |
| US11242227B2 (en) | Method and assembly device for carrying out an installation process in an elevator shaft of an elevator system | |
| US11480424B2 (en) | Locating system and method for determining a current position in an elevator shaft of an elevator system | |
| CN109676804B (zh) | 一种钻孔机器人 | |
| JPH05105362A (ja) | 昇降路内作業装置 | |
| JP7444710B2 (ja) | 昇降路内計測装置、および、昇降路内計測システム | |
| JPS61111892A (ja) | 天井作業用ロボツト | |
| JP7500832B1 (ja) | 建築用構造材の据付装置 | |
| JP2026013504A (ja) | 作業装置及び取付位置補正方法 | |
| JP2025120594A (ja) | 作業装置 | |
| CN119370709A (zh) | 作业装置 | |
| NZ732138B2 (en) | Mobile robotic drilling apparatus and method for drilling ceilings and walls | |
| HK1258511B (en) | Method and mounting device for carrying out an installation operation in a lift shaft of a lift system |