JP2020007910A - 電動スクロール圧縮機 - Google Patents
電動スクロール圧縮機 Download PDFInfo
- Publication number
- JP2020007910A JP2020007910A JP2018126224A JP2018126224A JP2020007910A JP 2020007910 A JP2020007910 A JP 2020007910A JP 2018126224 A JP2018126224 A JP 2018126224A JP 2018126224 A JP2018126224 A JP 2018126224A JP 2020007910 A JP2020007910 A JP 2020007910A
- Authority
- JP
- Japan
- Prior art keywords
- housing
- motor
- fixed
- motor housing
- scroll
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Rotary Pumps (AREA)
- Applications Or Details Of Rotary Compressors (AREA)
Abstract
【課題】振動および騒音を抑制することの可能な電動スクロール圧縮機を提供する。【解決手段】モータハウジング10は有底筒状に形成される。ミドルハウジング30は、モータハウジング10の内壁に当接または固定される。可動スクロール40は、モータ部20が有するシャフト23からトルクを伝達されてシャフト23の回転軸Axの周りを公転する。固定スクロール50は、シャフト23の回転軸Axに直角な方向に相対変位しないようにミドルハウジング30に固定される。リアハウジング60は、モータハウジング10の軸方向の端部に固定され、ミドルハウジング30に対して固定スクロール50を支持する。モータハウジング10とミドルハウジング30とが当接または固定されている箇所の剛性は、リアハウジング60が固定スクロール50を支持している箇所の剛性より大きくなるように構成されている。【選択図】図1
Description
本発明は、電動スクロール圧縮機に関するものである。
従来、冷媒を圧縮する電動スクロール圧縮機が知られている。特許文献1に記載の電動スクロール圧縮機は、有底筒状のモータハウジングと、そのモータハウジングの端部に固定されるリアハウジングにより形成される半密閉容器の内側に、モータ部、可動クロールおよび固定スクロール等が収容されたものである。モータ部は、モータハウジングの内壁に固定されるモータ固定子、そのモータ固定子の内側に回転可能に設けられるモータ回転子、そのモータ回転子と共に回転して可動スクロールにトルクを伝達するシャフトを有している。可動クロールは、モータ部が有するシャフトの回転軸の周りを公転するように構成され、固定スクロールと共に冷媒を圧縮する作動室を形成している。固定スクロールは、リアハウジングにボルトにより固定されている。
電動スクロール圧縮機では、モータ部は、作動室で圧縮される冷媒の反力に抗してトルクを発生させている。そのため、モータ部と作動室で生じるトルク変動は振動の原因となる。特許文献1に記載の構成では、冷媒の圧縮の際に生じる振動は、モータ部および可動スクロールから作動室の冷媒を介して固定スクロールに伝わり、その固定スクロールにボルトにより固定されたリアハウジングを経由してモータハウジングに伝わる。また、冷媒の圧縮の際に生じる振動は、モータ部のモータ固定子を経由してモータハウジングに伝わる。このように、特許文献1に記載の構成では、振動が伝達される経路が、モータ部、可動スクロール、固定スクロール、リアハウジング、モータハウジングを含むループ状となる。そして、そのループ状の経路は、リアハウジングとモータハウジングを含んでいるので距離が長いものとなる。そのため、モータハウジングに対してリアハウジング側から伝わる振動と、そのモータハウジングに対してモータ固定子側から伝わる振動との位相差および振幅差が大きくなる。また、振動が伝達される経路が長いので、その振動の伝達経路となるリアハウジング及びモータハウジング(以下「両ハウジング」という)の振動に対する捩じれ剛性が低下する。仮に、両ハウジングがいずれも完全な剛体であれば、振動が打ち消し合うため外部に振動は伝わらない。しかしながら、実際には、両ハウジングは完全な剛体ではないので、微小な弾性変形を伴いながら振動を伝達する。そのため、両ハウジングにおける振動に対する捩じれ剛性が低下すると、圧縮機自体の振動および騒音が増大するおそれがある。さらに、圧縮機が外部の部材(例えば車両のエンジンブロック等)に取り付けられる際、モータハウジングに設けられた取付足からその外部の部材を加振する力が大きくなり、圧縮機から外部の部材に伝わる振動および騒音が増大することが懸念される。
本発明は上記点に鑑みて、振動および騒音を抑制することの可能な電動スクロール圧縮機を提供することを目的とする。
上記目的を達成するため、請求項1に係る発明は、
冷媒を圧縮する電動スクロール圧縮機において、
有底筒状のモータハウジング(10)と、
モータハウジングの内壁に固定されるモータ固定子(21)、モータ固定子の内側に回転可能に設けられるモータ回転子(22)、および、モータ回転子と共に回転するシャフト(23)を有するモータ部(20)と、
モータハウジングの内壁に当接または固定され、シャフトを回転可能に支持するミドルハウジング(30)と、
シャフトの端部にシャフトの回転軸(Ax)に対して偏心して設けられる偏心部(26)と、
ミドルハウジングに対してモータ部とは反対側に配置され、偏心部からトルクを伝達されてシャフトの回転軸の周りを公転する可動スクロール(40)と、
シャフトの回転軸に直角な方向に相対変位しないようにミドルハウジングに固定され、可動スクロールと共に冷媒を圧縮する作動室(47)を形成する固定スクロール(50)と、
モータハウジングの軸方向の端部に固定され、ミドルハウジングに対して固定スクロールを支持するリアハウジング(60)と、を備え、
モータハウジングとミドルハウジングとが当接または固定されている箇所の剛性は、リアハウジングが固定スクロールを支持している箇所の剛性より大きくなるように構成されている。
冷媒を圧縮する電動スクロール圧縮機において、
有底筒状のモータハウジング(10)と、
モータハウジングの内壁に固定されるモータ固定子(21)、モータ固定子の内側に回転可能に設けられるモータ回転子(22)、および、モータ回転子と共に回転するシャフト(23)を有するモータ部(20)と、
モータハウジングの内壁に当接または固定され、シャフトを回転可能に支持するミドルハウジング(30)と、
シャフトの端部にシャフトの回転軸(Ax)に対して偏心して設けられる偏心部(26)と、
ミドルハウジングに対してモータ部とは反対側に配置され、偏心部からトルクを伝達されてシャフトの回転軸の周りを公転する可動スクロール(40)と、
シャフトの回転軸に直角な方向に相対変位しないようにミドルハウジングに固定され、可動スクロールと共に冷媒を圧縮する作動室(47)を形成する固定スクロール(50)と、
モータハウジングの軸方向の端部に固定され、ミドルハウジングに対して固定スクロールを支持するリアハウジング(60)と、を備え、
モータハウジングとミドルハウジングとが当接または固定されている箇所の剛性は、リアハウジングが固定スクロールを支持している箇所の剛性より大きくなるように構成されている。
これによれば、この電動スクロール圧縮機(以下「圧縮機」ということがある)は、モータ部が駆動すると、モータ部のシャフトから偏心部を経由して可動スクロールにトルクが伝達され、可動スクロールが公転して作動室の冷媒が圧縮される。上述したように、モータ部は、作動室で圧縮される冷媒の反力に抗してトルクを発生させている。そのため、モータ部と作動室で生じるトルク変動は振動の原因となる。請求項1に係る発明の構成では、冷媒の圧縮の際に生じる振動は、モータ部および可動スクロールから作動室の冷媒を介して固定スクロールに伝わり、そこからリアハウジングを経由することなく、ミドルハウジングを経由してモータハウジングに伝わる。また、冷媒の圧縮の際に生じる振動は、モータ部のモータ固定子を経由してモータハウジングに伝わる。このように、請求項1に係る発明の構成は、上述した特許文献1に記載の構成に比べて、固定スクロールからモータハウジングに振動が伝達される経路にリアハウジングが含まれない分、振動の伝達経路が短くなる。そのため、モータハウジングに対してミドルハウジング側から伝わる振動と、モータハウジングに対してモータ固定子側から伝わる振動との位相差および振幅差が小さくなり、振動が相殺されやすくなる。また、振動によりモータハウジング等に作用する捩じりトルクは一定であるが、モータハウジングの中の振動の伝達経路が短いものとなるので、モータハウジング等の捩じりトルクに対する変形量が小さくなる。したがって、圧縮機自体の振動および騒音が低減する。さらに、圧縮機が外部の部材に取り付けられる際、モータハウジングからその外部の部材を加振する力が小さくなる。したがって、この圧縮機は、ハウジングから外部の部材に伝わる振動および騒音を低減することができる。
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
以下、本発明の実施形態について図面を参照しつつ説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付し、その説明を省略する。
(第1実施形態)
第1実施形態について図面を参照しつつ説明する。本実施形態の電動スクロール圧縮機1(以下、「圧縮機1」という)は、車両に搭載される図示しない冷凍サイクルの一部を構成するものである。圧縮機1は、冷凍サイクルの配管から冷媒を吸入し、その冷媒を圧縮した後、冷凍サイクルの配管へ吐き出すものである。
第1実施形態について図面を参照しつつ説明する。本実施形態の電動スクロール圧縮機1(以下、「圧縮機1」という)は、車両に搭載される図示しない冷凍サイクルの一部を構成するものである。圧縮機1は、冷凍サイクルの配管から冷媒を吸入し、その冷媒を圧縮した後、冷凍サイクルの配管へ吐き出すものである。
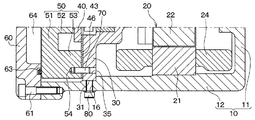
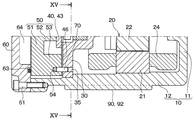
図1および図2に示すように、本実施形態の圧縮機1は、モータハウジング10、モータ部20、ミドルハウジング30、可動スクロール40、固定スクロール50およびリアハウジング60などを備えている。
モータハウジング10は、有底筒状に形成され、底部11およびその底部11の外縁から筒状に延びる筒部12を有している。そのモータハウジング10の底部11の軸方向の端部にリアハウジング60が固定されている。具体的には、モータハウジング10が有する筒部12のうち底部11とは反対側の端部と、リアハウジング60とが、ボルト61によって固定されている。これにより、モータハウジング10とリアハウジング60は密閉容器構造を構成している。なお、モータハウジング10とリアハウジング60とがボルト61により固定された構造は、溶接により固定される構造と区別して、半密閉容器構造と呼ばれることもある。
モータハウジング10には、冷凍サイクルの配管から密閉容器構造の内側に冷媒を吸入するための吸入ポート13が設けられている。一方、リアハウジング60には、密閉容器構造の内側で圧縮された冷媒を、冷凍サイクルの配管へ吐き出すための吐出ポート62が設けられている。
モータハウジング10とリアハウジング60により形成される密閉容器構造の内側には、冷媒を圧縮するための駆動力を生成するモータ部20と、冷媒を圧縮するための圧縮機構部を構成する可動スクロール40および固定スクロール50などが収容されている。
モータ部20は、モータハウジング10に固定されるモータ固定子21、そのモータ固定子21の内側に回転可能に設けられるモータ回転子22、そのモータ回転子22と共に回転して可動スクロール40にトルクを伝達するシャフト23を有している。
モータ固定子21は、モータハウジング10の内壁に対し、例えば焼嵌めまたは圧入などにより固定されている。磁性体から形成されたモータ固定子21が有する各ティースには、コイル24が巻かれている。そのコイル24に通電されると、モータ固定子21は、モータ回転子22を回転させるための回転磁界を発生する。
モータ回転子22は、モータ固定子21の径方向内側に回転可能に設けられている。モータ回転子22は、磁性体から形成され、周方向に異なる磁極が交互に配置されている。モータ回転子22の中心には、シャフト23が固定されている。シャフト23は、その一端がモータハウジング10の底部11に設けられたフロント軸受14に回転可能に支持され、他端がミドルハウジング30に設けられたメイン軸受32に回転可能に支持されている。
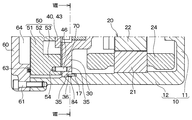
ミドルハウジング30は、略円盤状に形成されている。本実施形態では、ミドルハウジング30の径方向外側の外壁31は、モータハウジング10の内壁に圧入により固定されている。これにより、ミドルハウジング30とモータハウジング10とは、シャフト23の回転軸Axに垂直な方向に固定されている。そのため、本実施形態では、モータハウジング10とミドルハウジング30とが固定されている箇所において、シャフト23の回転軸Axに直角な方向の荷重に対する剛性を大きくすることが可能である。なお、剛性とは、2部品間の荷重に対する変形量の逆数である。
モータハウジング10の内壁には、その内径を変化させることで、シャフト23の軸に対して垂直な段差面15が形成されている。モータハウジング10の段差面15に対し、ミドルハウジング30の軸方向モータ部側の面の外周部分が当接している。これにより、ミドルハウジング30の軸方向の位置ずれが防がれる。
ミドルハウジング30は、シャフト23を挿通する挿通孔33を有している。そして、ミドルハウジング30は、メイン軸受32を介してシャフト23を回転可能に支持している。また、ミドルハウジング30は、モータハウジング10内のモータ部20側の空間25から圧縮機構部側の空間41に冷媒を供給するための供給孔34、及び、固定スクロール50の位置決めを行うための位置決めピン70が差し込まれる差込孔35を有している。
シャフト23のうち、ミドルハウジング30に設けられたメイン軸受32よりもさらに圧縮機構部側へ延出した端部には、偏心部26が設けられている。偏心部26は、円柱状に形成され、その重心がシャフト23の回転軸Axに対して偏心して設けられている。偏心部26は、可動スクロール40が有するボス部42の内側に摺動可能に嵌合している。なお、シャフト23の回転軸Axを挟んで偏心部26の反対側には、バランスウェイト27が設けられている。
圧縮機構部を構成する可動スクロール40と固定スクロール50などは、ミドルハウジング30に対してモータ部20とは反対側の空間に配置されている。
可動スクロール40は、円盤状の可動盤43、および、その可動盤43に設けられる渦巻状の可動ラップ44を有している。可動ラップ44は、可動盤43から固定スクロール50の固定盤51側へ突き出すように設けられている。なお、可動スクロール40は、図示しない自転防止機構により自転を規制されている。そのため、可動スクロール40は、シャフト23の偏心部26からボス部42を介して伝達されるトルクにより、シャフト23の回転軸Axの周りを公転するように構成されている。
なお、可動スクロール40の可動盤43とミドルハウジング30との間には、背圧室45が設けられている。背圧室45には、圧縮機構部により圧縮された高圧の冷媒が図示しない流路を通じて供給される。そのため、背圧室45の冷媒圧力により、可動スクロール40は固定スクロール50側へ押圧される。
固定スクロール50は、円盤状の固定盤51、および、その固定盤51に設けられる渦巻状の固定ラップ52、および、固定ラップ52よりも径方向外側において固定盤51の外縁部からミドルハウジング30側に筒状に延びる固定部53を有している。固定スクロール50の固定部53には、位置決めピン70が差し込まれる差込孔54が設けられている。位置決めピン70は、その一端がミドルハウジング30の差込孔35に差し込まれ、他端が固定スクロール50の差込孔54に差し込まれている。これにより、固定スクロール50は、シャフト23の回転軸Axに垂直な方向に相対変位しないようにミドルハウジング30に固定されている。なお、固定スクロール50の固定部53および可動スクロール40の可動盤43と、ミドルハウジング30との間には、共通の摺動板46が配置されている。
固定スクロール50が有する固定ラップ52と可動スクロール40が有する可動ラップ44とは、互いに嵌り合った状態で設置されている。そのため、固定スクロール50と可動スクロール40との間には、冷媒を圧縮するための作動室47が形成される。なお、図示していないが、作動室47は、軸方向から視て三日月状に形成される。可動スクロール40が公転すると、その作動室47は、径方向外側から径方向内側に向かって旋回移動し、次第にその容積を縮小する。これにより、冷媒が圧縮される。
固定スクロール50には、作動室47で圧縮された冷媒を吐き出すための吐出穴55が設けられている。吐出穴55は、固定スクロール50の固定盤51のうち、作動室47が最小容積となる部位に設けられている。吐出穴55およびその近傍には、冷媒の逆流を阻止するための図示していない薄板状の吐出弁と、その吐出弁の動作範囲を規制するためのストッパ56が設けられている。
上述したように、リアハウジング60は、モータハウジング10の軸方向の端部に固定されている。本実施形態のリアハウジング60は、ミドルハウジング30に対して固定スクロール50を挟んだ状態で、その固定スクロール50を支持している。具体的には、リアハウジング60と固定スクロール50との間には、空隙が形成されている。図2では、その空隙の厚みを符号Sで示している。そして、リアハウジング60と固定スクロール50との間には、シール部材としてのOリング63が設けられている。すなわち、リアハウジング60は、弾性体であるOリング63を介して固定スクロール50を支持している。本実施形態では、この構成により、リアハウジング60が固定スクロール50を支持している箇所の剛性を小さくすることが可能である。
Oリング63は、固定スクロール50をミドルハウジング30側に付勢している。これにより、圧縮機1が作動していないとき、Oリング63の弾性力により、固定スクロール50のがたつきが抑えられる。
また、リアハウジング60と固定スクロール50との間には、高圧マフラ室64が設けられている。高圧マフラ室64は、吐出穴55から吐き出された冷媒の吐出脈動を低減するための空間である。Oリング63は、その高圧マフラ室64と固定スクロール50の径外側の空間との冷媒の流通を防いでいる。圧縮機1が作動すると、作動室47で圧縮された冷媒が吐出穴55から高圧マフラ室64に吐き出されるので、高圧マフラ室64の冷媒圧力により固定スクロール50がミドルハウジング30側に付勢される。そのため、固定スクロール50から付勢力を受けたミドルハウジング30はモータハウジング10の軸方向の段差面15に押圧される。
次に、本実施形態の圧縮機1の作動について説明する。
モータ部20のコイル24に通電されると、モータ固定子21は、モータ回転子22を回転させるための回転磁界を発生する。これにより、モータ回転子22とシャフト23が、シャフト23の軸周りに回転する。シャフト23の偏心部26からボス部42を介して可動スクロール40にトルクが伝達されると、可動スクロール40は、シャフト23の回転軸Axの周りを公転する。これにより、固定スクロール50と可動スクロール40との間に形成された作動室47は、径方向外側から径方向内側に向かって旋回移動しつつ、次第にその容積を縮小する。そのため、作動室47の冷媒が圧縮される。作動室47で圧縮された冷媒は、吐出穴55から高圧マフラ室64に吐き出され、その高圧マフラ室64から吐出ポート62を介して冷凍サイクルの配管へ吐き出される。
モータ部20のコイル24に通電されると、モータ固定子21は、モータ回転子22を回転させるための回転磁界を発生する。これにより、モータ回転子22とシャフト23が、シャフト23の軸周りに回転する。シャフト23の偏心部26からボス部42を介して可動スクロール40にトルクが伝達されると、可動スクロール40は、シャフト23の回転軸Axの周りを公転する。これにより、固定スクロール50と可動スクロール40との間に形成された作動室47は、径方向外側から径方向内側に向かって旋回移動しつつ、次第にその容積を縮小する。そのため、作動室47の冷媒が圧縮される。作動室47で圧縮された冷媒は、吐出穴55から高圧マフラ室64に吐き出され、その高圧マフラ室64から吐出ポート62を介して冷凍サイクルの配管へ吐き出される。
ところで、電動式の圧縮機1では、モータ部20は、作動室47で圧縮される冷媒の反力に抗してトルクを発生させている。そのため、モータ部20と作動室47で生じるトルク変動は振動の原因となる。上述したように、本実施形態では、モータハウジング10とミドルハウジング30とが圧入により強固に固定されており、固定スクロール50とミドルハウジング30とは位置決めピン70により回転軸Axに垂直な方向に相対変位しないように固定されている。一方、リアハウジング60は弾性体であるOリング63を介して固定スクロール50を支持している。そのため、図1の破線V1で示したように、冷媒の圧縮の際に生じる振動は、モータ部20および可動スクロール40から作動室47の冷媒を介して固定スクロール50に伝わり、そこからミドルハウジング30を経由してモータハウジング10に伝わる。また、冷媒の圧縮の際に生じる振動は、モータ部20のモータ固定子21を経由してモータハウジング10に伝わる。すなわち、図1の破線V1で示したように、本実施形態の構成では、冷媒の圧縮の際に生じる振動が伝達される経路は、ループ状に形成される。そして、本実施形態の構成では、固定スクロール50からモータハウジング10に振動が伝達される経路にリアハウジング60が含まれない分、振動の伝達経路が短いものとなっている。
ここで、上述した本実実施形態の圧縮機1の構成と比較するため、比較例の圧縮機100の構成について説明する。
図19に示すように、比較例では、リアハウジング60と固定スクロール50とは、第1の位置決めピン71により、シャフト23の回転軸Axに垂直な方向に相対変位しないように固定されている。また、リアハウジング60と固定スクロール50とは当接している。そのため、比較例の構成では、リアハウジング60が固定スクロール50を支持している箇所の剛性が大きいものとなっている。
そして、固定スクロール50とミドルハウジング30も、第2の位置決めピン70により、シャフト23の回転軸Axに垂直な方向に相対変位しないように固定されている。なお、第1の位置決めピン71と第2の位置決めピン70の両者を設置可能とするため、ミドルハウジング30の径方向外側の外壁31とモータハウジング10の内壁との間には、所定の隙間が設けられている。
図19でも、冷媒の圧縮の際に生じる振動が伝達される経路を、破線V2によって示している。比較例の構成では、リアハウジング60が固定スクロール50を支持している箇所の剛性が大きいものとなっている。そのため、冷媒の圧縮の際に生じる振動は、モータ部20および可動スクロール40から作動室47の冷媒を介して固定スクロール50に伝わり、そこからリアハウジング60を経由してモータハウジング10に伝わる。また、冷媒の圧縮の際に生じる振動は、モータ部20のモータ固定子21を経由してモータハウジング10に伝わる。このように、比較例の構成では、固定スクロール50からモータハウジング10に振動が伝達される経路が、上述した第1実施形態の経路よりも長いものとなっている。
ところで、仮に、振動の伝達経路となる各構成部品がいずれも完全な剛体であれば、振動が打ち消し合うため、外部に振動は伝わらない。しかしながら、実際には、各構成部品は厳密には完全な剛体ではないので、微小な弾性変形を伴いながら振動を伝達するため、外部に振動が伝達してしまう。
比較例の構成では、振動が伝達される経路にリアハウジング60を含んでいる分、その経路が長いものとなっている。そのため、モータハウジング10に対してリアハウジング60側から伝わる振動と、そのモータハウジング10に対してモータ固定子21側から伝わる振動との位相差および振幅差が大きくなる。また、振動が伝達される経路が長いので、リアハウジング60およびモータハウジング10等の振動に対する捩じれ剛性が低下する。このように、振動が伝達される経路を構成するリアハウジング60およびモータハウジング10等の振動に対する捩じれ剛性が低下すると、圧縮機100自体の振動および騒音が増大するおそれがある。さらに、圧縮機100が、車両のエンジンブロックなどの外部の部材に取り付けられる際、モータハウジング10等に設けられる図示しない取付足からその外部の部材を加振する力が大きくなり、圧縮機1から外部の部材に伝わる振動および騒音が増大することが懸念される。
上述した比較例の圧縮機100に対し、本実施形態の圧縮機1は、次の作用効果を奏するものである。
(1)本実施形態では、モータハウジング10とミドルハウジング30とが当接または固定されている箇所の剛性は、リアハウジング60が固定スクロール50を支持している箇所の剛性より大きくなるように構成されている。この構成によれば、固定スクロール50からモータハウジング10に振動が伝達される経路にリアハウジング60が含まれない分、上述した比較例の構成に比べて、振動の伝達経路が短いものとなる。そのため、モータハウジング10に対してミドルハウジング30側から伝わる振動と、モータハウジング10に対してモータ固定子21側から伝わる振動との位相差および振幅差が小さくなり、振動が相殺されやすくなる。また、振動によりモータハウジング10等に作用する捩じりトルクは一定であるが、モータハウジング10の中の振動の伝達経路が短いものとなるので、モータハウジング10の捩じりトルクに対する変形量が小さくなる。したがって、圧縮機1自体の振動および騒音が低減する。さらに、圧縮機1が外部の部材に取り付けられる際、モータハウジング10からその外部の部材を加振する力が小さくなる。したがって、この圧縮機1は、モータハウジング10から外部の部材に伝わる振動および騒音を低減することができる。
(1)本実施形態では、モータハウジング10とミドルハウジング30とが当接または固定されている箇所の剛性は、リアハウジング60が固定スクロール50を支持している箇所の剛性より大きくなるように構成されている。この構成によれば、固定スクロール50からモータハウジング10に振動が伝達される経路にリアハウジング60が含まれない分、上述した比較例の構成に比べて、振動の伝達経路が短いものとなる。そのため、モータハウジング10に対してミドルハウジング30側から伝わる振動と、モータハウジング10に対してモータ固定子21側から伝わる振動との位相差および振幅差が小さくなり、振動が相殺されやすくなる。また、振動によりモータハウジング10等に作用する捩じりトルクは一定であるが、モータハウジング10の中の振動の伝達経路が短いものとなるので、モータハウジング10の捩じりトルクに対する変形量が小さくなる。したがって、圧縮機1自体の振動および騒音が低減する。さらに、圧縮機1が外部の部材に取り付けられる際、モータハウジング10からその外部の部材を加振する力が小さくなる。したがって、この圧縮機1は、モータハウジング10から外部の部材に伝わる振動および騒音を低減することができる。
(2)本実施形態では、リアハウジング60と固定スクロール50との間には空隙が形成されており、リアハウジング60はOリング63を介して固定スクロール50を支持している。これによれば、リアハウジング60と固定スクロール50とがOリング63を介して接続されるので、リアハウジング60が固定スクロール50を支持している箇所の剛性が小さくなる。そのため、固定スクロール50からモータハウジング10に振動が伝達される経路にリアハウジング60を含むことなく、振動の伝達経路を短くすることが可能である。したがって、圧縮機1自体の振動および騒音を低減すると共に、圧縮機1から外部の部材に伝わる振動および騒音を低減することができる。
(3)本実施形態では、リアハウジング60と固定スクロール50との間に設けられるOリング63は、固定スクロール50をミドルハウジング30側に付勢すると共に、固定スクロール50とリアハウジング60との間に高圧マフラ室64を形成している。これによれば、圧縮機1が作動していないとき、Oリング63の弾性力により固定スクロール50をミドルハウジング30側に付勢し、固定スクロール50のがたつきを抑えることができる。
また、圧縮機1が作動すると、作動室47で圧縮された冷媒が高圧マフラ室64に吐き出されるので、高圧マフラ室64の冷媒圧力により固定スクロール50がミドルハウジング30側に付勢される。そのため、固定スクロール50から付勢力を受けたミドルハウジング30はモータハウジング10の軸方向の段差面15に押圧されるので、その段差面15にもミドルハウジング30とモータハウジング10による振動の伝達経路が形成される。
(4)本実施形態では、ミドルハウジング30とモータハウジング10とは、圧入により、シャフト23の回転軸Axに垂直な方向に固定されている。これにより、モータハウジング10とミドルハウジング30とが固定されている箇所は、シャフト23の回転軸Axに直角な方向の荷重に対する剛性が大きくなる。ここで、冷媒の圧縮の際に生じる振動は、モータ部20と作動室47で生じるトルク変動に起因するものであるので、シャフト23の回転軸Axに垂直な方向の成分が大きい。そのため、ミドルハウジング30とモータハウジング10とをシャフト23の回転軸Axに垂直な方向に固定することで、ミドルハウジング30とモータハウジング10により形成される振動の伝達経路において、振動を確実に伝えることができる。
(第2〜第5実施形態)
第2〜第5実施形態は、第1実施形態に対して、モータハウジング10とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
第2〜第5実施形態は、第1実施形態に対して、モータハウジング10とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
第2実施形態では、図3に示すように、モータハウジング10とミドルハウジング30とは、ボルト80によって固定されている。具体的には、ボルト80は、モータハウジング10の径方向外側から、モータハウジング10に設けられた雌ねじ16に螺合し、ミドルハウジング30の径方向外側の外壁31を押圧している。これにより、モータハウジング10とミドルハウジング30とは強固に固定されている。なお、ミドルハウジング30の径方向外側の外壁31に、ボルト80が嵌る溝を設けてもよい。
第3実施形態では、図4に示すように、モータハウジング10とミドルハウジング30とは、溶接81によって固定されている。具体的には、モータハウジング10の径方向外側から溶接81が行われ、ミドルハウジング30の径方向外側の外壁31とモータハウジング10とが溶接81により強固に固定されている。
第4実施形態では、図5に示すように、モータハウジング10とミドルハウジング30とは、クサビ82によって固定されている。具体的には、モータハウジング10の内壁とミドルハウジング30の径方向外側の外壁31との隙間に、固定スクロール50側からクサビ82が打ち込まれている。これにより、モータハウジング10とミドルハウジング30とは強固に固定されている。なお、図示していないが、クサビ82は、周方向に複数個所設けることが好ましい。
第5実施形態では、図6に示すように、モータハウジング10とミドルハウジング30とは、接着剤83によって固定されている。具体的には、モータハウジング10の内壁とミドルハウジング30の径方向外側の外壁31との間に、接着剤83が塗布されている。これにより、モータハウジング10とミドルハウジング30とは強固に固定されている。
以上説明した第2〜第5実施形態では、モータハウジング10とミドルハウジング30とは、種々の固定方法により、シャフト23の回転軸Axに垂直な方向に相対変位しないように固定されている。これにより、モータハウジング10とミドルハウジング30とが固定されている箇所は、シャフト23の回転軸Axに直角な方向の荷重に対する剛性が大きくなる。ここで、冷媒の圧縮の際に生じる振動は、モータ部20と作動室47で生じるトルク変動に起因するものであるので、シャフト23の回転軸Axに垂直な方向の成分が大きい。そのため、ミドルハウジング30とモータハウジング10とをシャフト23の回転軸Axに垂直な方向に固定することで、ミドルハウジング30とモータハウジング10により形成される振動の伝達経路において、振動を確実に伝えることができる。
(第6および第7実施形態)
第6および第7実施形態も、第1実施形態等に対して、モータハウジング10とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第6および第7実施形態も、第1実施形態等に対して、モータハウジング10とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
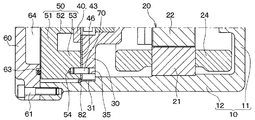
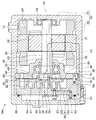
第6実施形態では、図7および図8に示すように、モータハウジング10とミドルハウジング30とは、ピン84によって、シャフト23の回転方向およびシャフト23の軸に垂直な方向に相対変位することが拘束されている。具体的には、ピン84は、その一端がモータハウジング10の段差面15に設けられた穴17に挿入され、他端がミドルハウジング30に設けられた穴36に挿入されている。
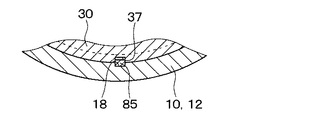
第7実施形態では、図9および図10に示すように、モータハウジング10とミドルハウジング30とは、キー85によって、シャフト23の回転方向に相対変位することが拘束されている。具体的には、キー85は、径方向内側の一部がモータハウジング10に設けられた溝18に嵌合し、径方向外側の一部がミドルハウジング30に設けられた溝37に嵌合している。
以上説明した第6および第7実施形態では、モータハウジング10とミドルハウジング30とは、シャフト23の回転方向の荷重に対する剛性が大きくなる。冷媒の圧縮の際に生じる振動は、シャフト23の回転方向の成分が大きい。そのため、ミドルハウジング30とモータハウジング10により形成される振動の伝達経路において、その振動を確実に伝えることができる。
(第8実施形態)
第8実施形態は、第1実施形態等に対して、モータ固定子21とモータハウジング10との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第8実施形態は、第1実施形態等に対して、モータ固定子21とモータハウジング10との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
図11に示すように、第8実施形態では、モータ固定子21は、ミドルハウジング30側の部位211の外径が、ミドルハウジング30とは反対側の部位212の外径よりも大きく形成されている。そのため、モータ固定子21は、ミドルハウジング30側の部位211がモータハウジング10の内壁に固定されており、ミドルハウジング30とは反対側の部位212がモータハウジング10の内壁に固定されていない。すなわち、モータ固定子21のうちミドルハウジング30とは反対側の部位212と、モータハウジング10の内壁との間には空隙が形成されている。
モータ固定子21とモータハウジング10が固定されている部位211は、モータ固定子21における軸方向の中心位置213よりもミドルハウジング30側に配置されている。これにより、モータハウジング10のうちで、冷媒の圧縮の際に生じる振動の伝達経路を短くすることが可能である。そのため、モータハウジング10のうちで、捩じりトルクが作用する範囲を短くすることが可能である。図11では、モータハウジング10のうちで、冷媒の圧縮の際に捩じりトルクが作用する範囲を、矢印Rで示している。
以上説明した第8実施形態では、モータハウジング10のうちで、冷媒の圧縮の際に捩じりトルクが作用する範囲を短くしている。そのため、モータハウジング10に対してミドルハウジング30側から伝わる振動と、モータハウジング10に対してモータ固定子21側から伝わる振動によってモータハウジング10に作用する捩じりトルクに対し、モータハウジング10の変形が抑制される。したがって、圧縮機1自体の振動および騒音を低減すると共に、圧縮機1から外部の部材に伝わる振動および騒音を低減することができる。
(第9〜第11実施形態)
第9〜第11実施形態は、第1実施形態等に対して、モータハウジング10の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第9〜第11実施形態は、第1実施形態等に対して、モータハウジング10の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
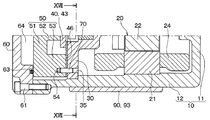
第9〜第11実施形態では、図12〜図17に示すように、モータハウジング10は、筒部12の一部に補強部90を有している。補強部90は、モータハウジング10の筒部12においてモータ固定子21が固定されている箇所に対応する位置から、ミドルハウジング30が固定されている箇所に対応する位置に亘り、その他の部位よりも捩じれ剛性が大きく構成された部位である。
第9実施形態では、図12および図13に示すように、モータハウジング10が有する補強部90は、モータハウジング10のうち補強部90を除く部位より肉厚が大きい厚肉部91により構成されている。ここで、モータハウジング10の筒部12のうち、厚肉部91よりもリアハウジング60側の部位の肉厚をt1とする。モータハウジング10の筒部12のうち、厚肉部91の肉厚をt2とする。モータハウジング10の筒部12のうち、厚肉部91よりも底部11側の部位の肉厚をt3とする。
このとき、t2>t1、且つ、t2>t3の関係が成立している。
このとき、t2>t1、且つ、t2>t3の関係が成立している。
第10実施形態では、図14および図15に示すように、モータハウジング10が有する補強部90は、モータハウジング10の外壁に設けられるリブ92により構成されている。リブ92は、モータハウジング10の軸方向に延びるように形成され、モータハウジング10の周方向に複数個設けられている。なお、モータハウジング10の筒部12とリブ92とは一体に形成されている。
第11実施形態では、図16および図17に示すように、モータハウジング10が有する補強部90は、モータハウジング10の外壁に設けられる補強部材93により構成されている。補強部材93は、筒状に形成され、モータハウジング10の径方向外側を囲うように設けられている。なお、モータハウジング10と補強部材93とは別部材で構成され、例えば圧入または焼嵌め等により固定されている。
以上説明した第9〜第11実施形態では、モータハウジング10のうち振動の伝達経路となる部位の捩じれ剛性を補強部90によって高めることが可能である。そのため、モータハウジング10に対してミドルハウジング30側から伝わる振動と、モータハウジング10に対してモータ固定子21側から伝わる振動によってモータハウジング10に作用する捩じりトルクに対し、モータハウジング10の変形が抑制される。したがって、圧縮機1自体の振動および騒音を低減すると共に、圧縮機1から外部の部材に伝わる振動および騒音を低減することができる。
さらに、第9〜第11実施形態では、モータハウジング10の剛性を全体的に大きくすることなく、冷媒の圧縮の際に捩じりトルクが作用する範囲の剛性を効果的に大きくすることが可能である。これにより、材料費などのコストアップを最小限に抑えることができる。
(第12実施形態)
第12実施形態は、第1実施形態等に対して、固定スクロール50とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第12実施形態は、第1実施形態等に対して、固定スクロール50とミドルハウジング30との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
図18に示すように、第12実施形態では、固定スクロール50とミドルハウジング30とは、ボルト73により固定されている。ボルト73は、ミドルハウジング30のボルト挿通孔38を通り、固定スクロール50の固定部53に設けられたねじ穴57に螺合している。これにより、固定スクロール50は、ミドルハウジング30に対し、軸方向の変位が規制される。
なお、第12実施形態においても、固定スクロール50とミドルハウジング30とは、位置決めピン70により、シャフト23の回転軸Axに垂直な方向の変位が規制されている。なお、第12実施形態の構成において、固定スクロール50とミドルハウジング30とを固定するボルト73が、シャフト23の回転軸Axに垂直な方向の変位を規制する機能を有するものであれば、位置決めピン70を廃することも可能である。
(他の実施形態)
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではないことは言うまでもない。また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。また、上記各実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではないことは言うまでもない。また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。また、上記各実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。
(1)上記各実施形態では、リアハウジング60と固定スクロール50との間に配置するシール部材としてOリング63を例示したが、シール部材はそれに限らず、例えばガスケットなどとしてもよい。
(2)上記各実施形態では、ミドルハウジング30の径方向外側の外壁31とモータハウジング10の内壁とを、圧入、ボルト、溶接、クサビ、または接着を含む固定方法により固定した。これに対し、他の実施形態では、ミドルハウジング30の径方向外側の外壁31とモータハウジング10の内壁とは固定しなくてもよい。その場合でも、リアハウジング60と固定スクロール50との間に形成される高圧マフラ室64の圧力により、固定スクロール50がミドルハウジング30側に付勢されるので、ミドルハウジング30はモータハウジング10の軸方向の段差面15に押圧される。これにより、その段差面15を介して、ミドルハウジング30とモータハウジング10を振動が伝達する。したがって、モータ部20→可動スクロール40→固定スクロール50→ミドルハウジング30→モータハウジング10→モータ部20による振動の伝達経路を形成することが可能である。
(まとめ)
上述の実施形態の一部または全部で示された第1の観点によれば、冷媒を圧縮する電動スクロール圧縮機は、モータハウジング、モータ部、ミドルハウジング、偏心部、可動スクロール、固定スクロールおよびリアハウジングを備える。モータハウジングは有底筒状に形成されている。モータ部は、モータハウジングの内壁に固定されるモータ固定子、モータ固定子の内側に回転可能に設けられるモータ回転子、および、モータ回転子と共に回転するシャフトを有する。ミドルハウジングは、モータハウジングの内壁に当接または固定され、シャフトを回転可能に支持する。偏心部は、シャフトの端部にシャフトの回転軸に対して偏心して設けられる。可動スクロールは、ミドルハウジングに対してモータ部とは反対側に配置され、偏心部からトルクを伝達されてシャフトの回転軸の周りを公転する。固定スクロールは、シャフトの回転軸に直角な方向に相対変位しないようにミドルハウジングに固定され、可動スクロールと共に冷媒を圧縮する作動室を形成する。リアハウジングは、モータハウジングの軸方向の端部に固定され、ミドルハウジングに対して固定スクロールを支持する。そして、モータハウジングとミドルハウジングとが当接または固定されている箇所の剛性は、リアハウジングが固定スクロールを支持している箇所の剛性より大きくなるように構成されている。
上述の実施形態の一部または全部で示された第1の観点によれば、冷媒を圧縮する電動スクロール圧縮機は、モータハウジング、モータ部、ミドルハウジング、偏心部、可動スクロール、固定スクロールおよびリアハウジングを備える。モータハウジングは有底筒状に形成されている。モータ部は、モータハウジングの内壁に固定されるモータ固定子、モータ固定子の内側に回転可能に設けられるモータ回転子、および、モータ回転子と共に回転するシャフトを有する。ミドルハウジングは、モータハウジングの内壁に当接または固定され、シャフトを回転可能に支持する。偏心部は、シャフトの端部にシャフトの回転軸に対して偏心して設けられる。可動スクロールは、ミドルハウジングに対してモータ部とは反対側に配置され、偏心部からトルクを伝達されてシャフトの回転軸の周りを公転する。固定スクロールは、シャフトの回転軸に直角な方向に相対変位しないようにミドルハウジングに固定され、可動スクロールと共に冷媒を圧縮する作動室を形成する。リアハウジングは、モータハウジングの軸方向の端部に固定され、ミドルハウジングに対して固定スクロールを支持する。そして、モータハウジングとミドルハウジングとが当接または固定されている箇所の剛性は、リアハウジングが固定スクロールを支持している箇所の剛性より大きくなるように構成されている。
第2の観点によれば、リアハウジングと固定スクロールとの間には空隙が形成されており、リアハウジングはシール部材を介して固定スクロールを支持している。
これにより、リアハウジングと固定スクロールとがシール部材を介して接続されるので、リアハウジングが固定スクロールを支持している箇所の剛性が小さくなる。そのため、固定スクロールからモータハウジングに振動が伝達される経路にリアハウジングを含むことなく、振動の伝達経路を短くすることが可能である。したがって、圧縮機自体の振動および騒音を低減すると共に、圧縮機から外部の部材に伝わる振動および騒音を低減することができる。
第3の観点によれば、リアハウジングと固定スクロールとの間に設けられるシール部材は、固定スクロールをミドルハウジング側に付勢すると共に、固定スクロールとリアハウジングとの間に高圧マフラ室を形成している。
これによれば、圧縮機が作動していないとき、シール部材の弾性力により固定スクロールをミドルハウジング側に付勢し、固定スクロールのがたつきを抑えることができる。
また、圧縮機が作動すると、作動室で圧縮された冷媒が高圧マフラ室に吐き出されるので、高圧マフラ室の冷媒圧力により固定スクロールがミドルハウジング側に付勢される。そのため、固定スクロールから付勢力を受けたミドルハウジングはモータハウジングの軸方向の段差面に押圧されるので、そこにもミドルハウジングとモータハウジングによる振動の伝達経路が形成される。
第4の観点によれば、ミドルハウジングとモータハウジングとは、圧入、ボルト、溶接、クサビ、または接着を含む固定方法により、シャフトの回転軸に垂直な方向に固定されている。
これにより、モータハウジングとミドルハウジングとが固定されている箇所は、シャフトの回転軸に直角な方向の荷重に対する剛性が大きくなる。ここで、冷媒の圧縮の際に生じる振動は、モータ部と作動室で生じるトルク変動に起因するものであるので、シャフトの回転軸に垂直な方向の振動である。そのため、ミドルハウジングとモータハウジングとをシャフトの回転軸に垂直な方向に固定することで、ミドルハウジングとモータハウジングにより形成される振動の伝達経路において、振動を確実に伝えることができる。
第5の観点によれば、モータハウジングとミドルハウジングとが、シャフトの回転軸に垂直な方向に相対変位することを拘束するためのピンまたはキーを備える。
これにより、モータハウジングとミドルハウジングとは、シャフトの回転方向の荷重に対する剛性が大きくなる。冷媒の圧縮の際に生じる振動は、シャフトの回転方向の成分が大きい。そのため、ミドルハウジングとモータハウジングにより形成される振動の伝達経路において、その振動を確実に伝えることができる。
第6の観点によれば、モータハウジングは、モータ固定子が固定されている箇所に対応する位置から、ミドルハウジングが固定されている箇所に対応する位置に亘り、その他の部位よりも捩じれ剛性が大きく構成された補強部を有する。
これによれば、モータハウジングのうち、振動の伝達経路となる部位の捩じれ剛性を補強部によって高めることが可能である。そのため、モータハウジングに対してミドルハウジング側から伝わる振動と、モータハウジングに対してモータ固定子側から伝わる振動によってモータハウジングに作用する捩じりトルクに対し、モータハウジングの変形が抑制される。したがって、圧縮機自体の振動および騒音を低減すると共に、圧縮機から外部の部材に伝わる振動および騒音を低減することができる。
また、この構成により、モータハウジングの剛性を全体的に大きくすることなく、冷媒の圧縮の際に捩じりトルクが作用する範囲の剛性を効果的に大きくすることが可能である。これにより、材料費などのコストアップを最小限に抑えることができる。
第7の観点によれば、補強部は、モータハウジングのうち補強部を除く部位より肉厚が大きい厚肉部、或いは、モータハウジングの外壁に設けられるリブまたは補強部材により構成されている。
これによれば、補強部として、厚肉部、リブまたは補強部材が例示される。
第8の観点によれば、モータ固定子とモータハウジングが固定されている部位は、モータ固定子における軸方向の中心位置よりもミドルハウジング側に配置されている。
これによれば、モータハウジングのうち、振動の伝達経路となる部位を短くすることが可能である。そのため、モータハウジングに対してミドルハウジング側から伝わる振動と、モータハウジングに対してモータ固定子側から伝わる振動によってモータハウジングに作用する捩じりトルクに対し、モータハウジングの変形が抑制される。したがって、圧縮機自体の振動および騒音を低減すると共に、圧縮機から外部の部材に伝わる振動および騒音を低減することができる。
1 電動スクロール圧縮機
10 モータハウジング
20 モータ部
23 シャフト
26 偏心部
30 ミドルハウジング
40 可動スクロール
47 作動室
50 固定スクロール
60 リアハウジング
10 モータハウジング
20 モータ部
23 シャフト
26 偏心部
30 ミドルハウジング
40 可動スクロール
47 作動室
50 固定スクロール
60 リアハウジング
Claims (8)
- 冷媒を圧縮する電動スクロール圧縮機において、
有底筒状のモータハウジング(10)と、
前記モータハウジングの内壁に固定されるモータ固定子(21)、前記モータ固定子の内側に回転可能に設けられるモータ回転子(22)、および、前記モータ回転子と共に回転するシャフト(23)を有するモータ部(20)と、
前記モータハウジングの内壁に当接または固定され、前記シャフトを回転可能に支持するミドルハウジング(30)と、
前記シャフトの端部に前記シャフトの回転軸(Ax)に対して偏心して設けられる偏心部(26)と、
前記ミドルハウジングに対して前記モータ部とは反対側に配置され、前記偏心部からトルクを伝達されて前記シャフトの回転軸の周りを公転する可動スクロール(40)と、
前記シャフトの回転軸に直角な方向に相対変位しないように前記ミドルハウジングに固定され、前記可動スクロールと共に冷媒を圧縮する作動室(47)を形成する固定スクロール(50)と、
前記モータハウジングの軸方向の端部に固定され、前記ミドルハウジングに対して前記固定スクロールを支持するリアハウジング(60)と、を備え、
前記モータハウジングと前記ミドルハウジングとが当接または固定されている箇所の剛性は、前記リアハウジングが前記固定スクロールを支持している箇所の剛性より大きくなるように構成されている、電動スクロール圧縮機。 - 前記リアハウジングと前記固定スクロールとの間には空隙(S)が形成されており、前記リアハウジングはシール部材(63)を介して前記固定スクロールを支持している、請求項1に記載の電動スクロール圧縮機。
- 前記リアハウジングと前記固定スクロールとの間に設けられる前記シール部材は、前記固定スクロールを前記ミドルハウジング側に付勢すると共に、前記固定スクロールと前記リアハウジングとの間に高圧マフラ室(64)を形成している、請求項2に記載の電動スクロール圧縮機。
- 前記ミドルハウジングと前記モータハウジングとは、圧入、ボルト(80)、溶接(81)、クサビ(82)、または接着(83)を含む固定方法により、前記シャフトの回転軸に垂直な方向に固定されている、請求項1ないし3のいずれか1つに記載の電動スクロール圧縮機。
- 前記モータハウジングと前記ミドルハウジングとが、前記シャフトの回転軸に垂直な方向に相対変位することを拘束するためのピン(84)またはキー(85)を備える、請求項1ないし4のいずれか1つに記載の電動スクロール圧縮機。
- 前記モータハウジングは、前記モータ固定子が固定されている箇所に対応する位置から、前記ミドルハウジングが固定されている箇所に対応する位置に亘り、その他の部位よりも捩じれ剛性が大きく構成された補強部(90)を有する、請求項1ないし5のいずれか1つに記載の電動スクロール圧縮機。
- 前記補強部は、前記モータハウジングのうち前記補強部を除く部位より肉厚が大きい厚肉部(91)、或いは、前記モータハウジングの外壁に設けられるリブ(92)または補強部材(93)により構成されている、請求項6に記載の電動スクロール圧縮機。
- 前記モータ固定子と前記モータハウジングとが固定されている部位(211)は、前記モータ固定子における軸方向の中心位置(213)よりも前記ミドルハウジング側に配置されている、請求項1ないし7のいずれか1つに記載の電動スクロール圧縮機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018126224A JP2020007910A (ja) | 2018-07-02 | 2018-07-02 | 電動スクロール圧縮機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018126224A JP2020007910A (ja) | 2018-07-02 | 2018-07-02 | 電動スクロール圧縮機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020007910A true JP2020007910A (ja) | 2020-01-16 |
Family
ID=69150924
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018126224A Pending JP2020007910A (ja) | 2018-07-02 | 2018-07-02 | 電動スクロール圧縮機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020007910A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114427534A (zh) * | 2020-10-29 | 2022-05-03 | 艾默生环境优化技术(苏州)有限公司 | 压缩机 |
| WO2024062859A1 (ja) * | 2022-09-22 | 2024-03-28 | サンデン株式会社 | 電動圧縮機 |
| US12497966B2 (en) | 2020-10-29 | 2025-12-16 | Copeland Climate Technologies (Suzhou) Co. Ltd. | Compressor with bottom cover and bearing block arrangement |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59208194A (ja) * | 1983-05-13 | 1984-11-26 | Toshiba Corp | 回転式圧縮機 |
| JPH05263776A (ja) * | 1992-03-19 | 1993-10-12 | Toshiba Corp | スクロール形圧縮機 |
| JPH07247967A (ja) * | 1994-03-10 | 1995-09-26 | Toshiba Corp | スクロ−ル形圧縮機 |
| JPH08319963A (ja) * | 1995-03-22 | 1996-12-03 | Mitsubishi Electric Corp | スクロール圧縮機 |
| JP2007170227A (ja) * | 2005-12-20 | 2007-07-05 | Sanden Corp | 流体機械 |
| JP2015158156A (ja) * | 2014-02-24 | 2015-09-03 | 株式会社デンソー | スクロール型圧縮機 |
-
2018
- 2018-07-02 JP JP2018126224A patent/JP2020007910A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59208194A (ja) * | 1983-05-13 | 1984-11-26 | Toshiba Corp | 回転式圧縮機 |
| JPH05263776A (ja) * | 1992-03-19 | 1993-10-12 | Toshiba Corp | スクロール形圧縮機 |
| JPH07247967A (ja) * | 1994-03-10 | 1995-09-26 | Toshiba Corp | スクロ−ル形圧縮機 |
| JPH08319963A (ja) * | 1995-03-22 | 1996-12-03 | Mitsubishi Electric Corp | スクロール圧縮機 |
| JP2007170227A (ja) * | 2005-12-20 | 2007-07-05 | Sanden Corp | 流体機械 |
| JP2015158156A (ja) * | 2014-02-24 | 2015-09-03 | 株式会社デンソー | スクロール型圧縮機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114427534A (zh) * | 2020-10-29 | 2022-05-03 | 艾默生环境优化技术(苏州)有限公司 | 压缩机 |
| US12497966B2 (en) | 2020-10-29 | 2025-12-16 | Copeland Climate Technologies (Suzhou) Co. Ltd. | Compressor with bottom cover and bearing block arrangement |
| WO2024062859A1 (ja) * | 2022-09-22 | 2024-03-28 | サンデン株式会社 | 電動圧縮機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5072387B2 (ja) | スクロール圧縮機 | |
| CN111456934B (zh) | 涡旋式压缩机 | |
| CN107002676B (zh) | 电动涡旋压缩机 | |
| CN103122854B (zh) | 车辆用压缩机 | |
| US20150159652A1 (en) | Scroll-type compressor | |
| JP2002089463A (ja) | スクロール型圧縮機 | |
| CN104514718B (zh) | 涡旋式流体机械 | |
| CN105683576B (zh) | 电动涡旋压缩机 | |
| US11506201B2 (en) | Scroll compressor having intermediate pressure chamber to supply fluid to compression chambers via two supply passages and two injection ports to limit reduction in compression efficiency | |
| CN110319001A (zh) | 涡旋型压缩机 | |
| JP6943215B2 (ja) | 電動圧縮機 | |
| JP2020007910A (ja) | 電動スクロール圧縮機 | |
| WO2020189603A1 (ja) | スクロール圧縮機 | |
| WO2017057159A1 (ja) | スクロール型圧縮機 | |
| US12529378B1 (en) | Scroll compressor with shaft balancer and bushing balancer | |
| JP2006183527A (ja) | 流体機械 | |
| JP2011196244A (ja) | 圧縮機 | |
| US11486395B2 (en) | Motor-driven compressor | |
| CN109642569B (zh) | 涡旋压缩机 | |
| JP5631355B2 (ja) | スクロール圧縮機 | |
| JP7823613B2 (ja) | スクロール型圧縮機 | |
| CN115523139A (zh) | 涡旋式压缩机 | |
| JP4415178B2 (ja) | スクロール流体機械及びその組立方法 | |
| WO2004061309A1 (ja) | 電動内接ギヤポンプ | |
| JP2018071481A (ja) | スクロール型流体機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220118 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220712 |