JP2020008401A - 情報処理装置 - Google Patents
情報処理装置 Download PDFInfo
- Publication number
- JP2020008401A JP2020008401A JP2018128981A JP2018128981A JP2020008401A JP 2020008401 A JP2020008401 A JP 2020008401A JP 2018128981 A JP2018128981 A JP 2018128981A JP 2018128981 A JP2018128981 A JP 2018128981A JP 2020008401 A JP2020008401 A JP 2020008401A
- Authority
- JP
- Japan
- Prior art keywords
- link
- intersection
- information
- lane
- priority
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】適切に交差点を走行することができる情報処理装置を提供する。【解決手段】情報処理装置1Aは、処理部3Aが、交差点における進入車線リンクと退出車線リンクとを接続する交差点内リンクに関するリンクテーブル5a1を取得し、さらに当該交差点における環境情報を取得する。そして、処理部3Aは、取得した環境情報に基づいて走行経路とする交差点内リンクを選択する。【選択図】図9
Description
本発明は、リンク情報に基づいて所定の処理を行う情報処理装置に関する。
近年、車両に搭載したカメラ、ライダ(LiDAR:Light Detection And Ranging)などの各種センサにより自車両周辺の状況を取得しながら自律走行する車両(自動運転車両)が開発されている。
自動運転車両用の地図データは一般的に、車線単位のリンクによって表現される車線ネットワークデータと、従来のカーナビゲーション等で用いている道路単位のリンクによって表現される道路ネットワークデータと、によって構成されることが多い。
車線ネットワークを利用した経路表示等の技術としては例えば特許文献1に記載の発明が挙げられる。特許文献1には、道路リンクDB32を参照し、目的地までの案内経路を示す経路情報し、道路リンクと対応情報34により対応付けられた車線リンクを車線リンクDB33から抽出して、抽出した車線リンクに基づき、経路線Lrtの表示態様を決定しディスプレイ44に表示させる。
ところで、車線リンクは、交差点内において通行可能な経路に対しては、交差点内リンク(交差点に進入するリンクと退出するリンクとを結ぶリンク)として整備されている必要があるが、実際の交差点に車線がペイントされているわけでは無いので、どの進入リンクと退出リンクの組合せに対するリンクを整備すべきかが明確でない。
特許文献1に記載の発明では、交差点に進入するまで或いは交差点から退出したあとの車線変更の可否等によって通行可能な経路を表示しているが、交差点内の経路の選択については特に触れられていない。
本発明が解決しようとする課題としては、適切に交差点を走行することができる情報処理装置の提供が一例として挙げられる。
上記課題を解決するために、請求項1に記載の発明は、交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報を取得するリンク情報取得部と、前記交差点における環境情報を取得する環境情報取得部と、前記環境情報取得部が取得した前記環境情報に基づいて走行経路とする前記交差点内リンクを選択する選択部と、を備えることを特徴としている。
請求項4に記載の発明は、交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報に基づいて所定の処理を行う情報処理装置で実行される情報処理方法であって、前記リンク情報を取得するリンク情報取得工程と、前記交差点における環境情報を取得する環境情報取得工程と、前記環境情報取得工程で取得した前記環境情報に基づいて走行経路とする前記交差点内リンクを選択する選択工程と、を含むことを特徴としている。
請求項5に記載の発明は、請求項4に記載の情報処理方法を、コンピュータにより実行させることを特徴としている。
請求項6に記載の発明は、請求項5に記載の情報処理プログラムを格納したことを特徴としている。
以下、本発明の一実施形態にかかる情報処理装置を説明する。本発明の一実施形態にかかる情報処理装置は、リンク情報取得部が交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報を取得し、環境情報取得部が交差点における環境情報を取得する。そして、選択部において、環境情報取得部が取得した環境情報に基づいて走行経路とする交差点内リンクを選択する。このようにすることにより、現実の交差点における信号機の状態や対向車の有無といった環境情報に基づいて適切なリンクを選択することができる。
また、リンク情報には、交差点内リンク毎に優先度を示す情報が設定されており、選択部は、環境情報及び優先度を示す情報に基づいて交差点内リンクのうち走行経路とする交差点内リンクを選択してもよい。このようにすることにより、優先度を示す情報に環境情報を考慮して走行するリンクを選択することができる。
また、選択部は、走行し易い交差点内リンクを走行経路として選択するようにしてもよい。このようにすることにより、環境情報に基づいて加速度の変化の少ない等、走行する車両等の乗員が不快に感じないような経路を走行することができる。
また、本発明の一実施形態にかかる情報処理方法は、リンク情報取得工程で交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報を取得し、環境情報取得工程で交差点における環境情報を取得する。そして、選択工程において、環境情報取得工程で取得した環境情報に基づいて走行経路とする交差点内リンクを選択する。このようにすることにより、現実の交差点における信号機の状態や対向車の有無といった環境情報に基づいて適切なリンクを選択することができる。
また、上述した情報処理方法をコンピュータにより実行させる情報処理プログラムとしてもよい。このようにすることにより、コンピュータを用いて、現実の交差点における信号機の状態や対向車の有無といった環境情報に基づいて適切なリンクを選択することができる。
また、上述した情報処理プログラムをコンピュータ読み取り可能な記録媒体に格納してもよい。このようにすることにより、当該プログラムを機器に組み込む以外に単体でも流通させることができ、バージョンアップ等も容易に行える。
本発明の第1の実施例にかかる地図データのデータ構造および経路探索装置としてのナビゲーション装置1を図1〜図8を参照して説明する。
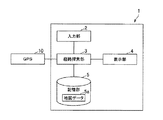
図1にナビゲーション装置1の機能的構成を示す。ナビゲーション装置1は、入力部2と、経路探索部3と、表示部4と、記憶部5と、を備えている。なお、図1に示した構成は、車載機器として構成したものであるが、携帯端末として構成してもよい。或いは、サーバ装置に経路探索部3と記憶部5の機能を持たせて、車両側にはGPS受信機10と表示部4と入力部2を有する構成としてもよい。
入力部2は、例えばタッチパネルや、押しボタン等から構成され、使用者等による目的地等の入力操作を受け付ける。
経路探索部3は、例えば現在位置等の所定位置から入力部2が受け付けた目的地までの経路を記憶部5に格納されている地図データ5aに基づいて探索する。また、経路探索部3は、探索した経路に沿って使用者等を誘導するための情報(誘導情報)を生成し出力する。誘導情報としては、表示部4に表示する経路を示すラインや矢印等、また、図示しないスピーカ等から出力する案内音声等である。なお、現在位置は、GPS受信機10から受信する。
表示部4は、例えば液晶ディスプレイやELディスプレイ等から構成され、経路探索部3で生成された誘導情報や、記憶部5に格納されている地図データ5a及び操作用のボタンやメニュー等を表示する。
記憶部5は、経路探索部3で使用する地図データ5aが格納されている。地図データ5aは、車両が自律的に走行させる所謂自動運転にも対応した地図データである。この自動運転用の地図データは、車線単位のリンクによって表現される車線ネットワークのデータと、従来のカーナビゲーション等で用いている道路単位のリンクによって表現される道路ネットワークのデータと、によって構成されている。
記憶部5としては、HDD(Hard Disk Drive)やSSD(Solid State Drive)等の記憶媒体で構成されるに限らず、メモリーカードや光ディスク等の可搬性を有する記憶媒体であってもよい。
道路ネットワークのデータには、道路網を交差点等の道路の接続部分に相当するノードとノード間を結ぶリンクとに表した場合の道路毎のリンクの詳細情報が定められているリンクテーブルや、前記したノードの詳細情報が定められているノードテーブルが含まれている。
車線ネットワークのデータには、道路を構成する各車線を所定の基準に基づき区切った区間に対応する車線毎のリンクの詳細情報が定められているリンク情報としてのリンクテーブルや、前記した区切った部分に設けられるノードについての詳細情報が定められているノードテーブルが含まれるデータ構造となっている。
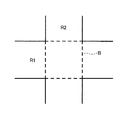
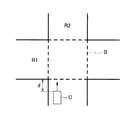
そして、本実施例にかかる地図データ5aは、車線ネットワークにおける交差点部分のリンクテーブルにおいて、当該交差点の進入車線リンクと退出車線リンクとを接続するリンク(交差点内リンク)に対して、それぞれ優先度が設定されている。一例を図2〜図4を参照して説明する。本実施例では、交差点とは、2以上の道路が交わる場合における当該2以上の道路の交わる部分とする。例えば図2に示したような道路R1と道路R2が交差する十字路の場合であれば、破線Bで囲まれた範囲を交差点とする。なお、交差点の範囲は、進入車線リンクの終点ノードや退出車線リンクの始点ノードの位置等により適宜変更してもよい。
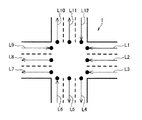
図3は、交差点の例を示した図である。図3に示した交差点Iは、図の右側から交差点Iに進入する車線が車線リンクL1、L2、L3の3車線、交差点Iから図の左側に退出する車線が車線リンクL7、L8の2車線、図の左側から交差点Iに進入する車線が車線リンクL9の1車線となっている。また、交差点Iは、図の上側から交差点Iに進入する車線が車線リンクL12の1車線、交差点Iから図の下側に退出する車線が車線リンクL4、L5の2車線、図の下側から交差点Iに進入する車線が車線リンクL6の1車線、交差点Iから図の上側に退出する車線が車線リンクL10の1車線となっている。
この交差点Iにおいて、例えば車線リンクL1〜L3に対応する車線からは全ての車線で直進、右折、左折が許可されているとすると、図4に示すように、交差点Iへの進入車線リンクとなる車線リンクL1〜L3と退出車線リンクとなる車線リンクL4、L5、L7、L8、L10、L11とを相互に接続するリンク(交差点内リンク)が発生することとなる。
しかしながら、これらの交差点内リンクは、退出車線リンクとなる車線リンクによっては、対向車や他車線を走行する車両との関係や走行距離等から通行が好ましくないリンクも存在する。これは、交差点Iへの他の進入車線リンクとなる車線リンクL6、L9、L12から直進や右左折により退出する際も同様のことが言える。
したがって、本実施例では、上述したように進入車線リンクと退出車線リンクとを接続する交差点内リンクに対して、それぞれ優先度を設定する。優先度を設定したリンクテーブル5a1の例を図5に示す。
図5に示したリンクテーブル5a1は、リンクID5a2、始点ノード5a3、終点ノード5a4、優先度5a5が含まれている。リンクID5a2は、上述した交差点内リンクをそれぞれ識別するために付与されているIDである。始点ノード5a3は、当該リンクの始点となるノードのID等が設定されている。例えば図4の場合であれば、進入車線リンクの終点ノードのIDを設定すればよい。終点ノード5a4は、当該リンクの終点となるノードのID等が設定されている。例えば図4の場合であれば、退出車線リンクの始点ノードのIDを設定すればよい。つまり、リンクテーブル5a1は、交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報である。
優先度5a5は、交差点を通行する際に走行すべき経路としての優先する度合いが数値等として設定されている。即ち、優先度5a5は、交差点における優先度を示す情報となる。図5の場合、優先順位として設定されている。例えば、リンクID1とリンクID2はどちらも始点ノードがN01であるが、終点ノードはN02とN03で異なる。そこで優先度5a5を参照すると、リンクID1が優先度“1”でリンクID2の優先度が“2”であるので、リンクID1の優先順位が高いため優先的に選択される。
なお、優先度5a5の数値は優先順位に限らず、所定の方法で算出した数値であってもよい。例えば、100点満点中の80点といった数値でもよい。
次に、優先度5a5の設定基準について説明する。優先度5a5は、交差点リンクの特性に基づいて例えば以下のような設定基準により設定されている。まず、1つ目の設定基準としては、対象とする交差点内リンクにおける進入車線リンクから退出車線リンクまでの距離に基づくものが挙げられる。これは、進入車線リンクから退出車線リンクまでの距離が短いほど優先されるようにするものである。具体例を図6に示す。
図6は、進入車線リンクL3から交差点Iで左折する際の交差点内リンクを示したものである。つまり、進入車線リンクL3と退出車線リンクL4とを接続するリンクL34と、進入車線リンクL3と退出車線リンクL5とを接続するリンクL35と、が示されている。
このリンクL34とリンクL35とは、図6から明らかなようにリンクL34の方が距離が短い。したがって、リンクL34の方がリンクL35よりも優先されるように優先度5a5が設定される。
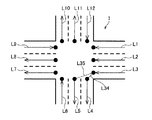
2つ目の設定基準としては、対象とする交差点内リンクにおける他の交差点内リンクとの交差数に基づくものが挙げられる。これは、他の交差点リンクと交差する数が少ない交差点内リンクが優先されるようにするものである。具体例を図7に示す。
図7も、進入車線リンクL3から交差点Iで左折する際の交差点内リンクを示したものである。ここで、進入車線リンクL3が左折可能な場合は上述したように進入車線リンクL1、L2からの左折も可能である。この場合、退出車線リンクL4、L5と接続するリンクとしては、上述したリンクL34、L35の他に、進入車線リンクL2と退出車線リンクL4とを接続するリンクL24と、進入車線リンクL2と退出車線リンクL5とを接続するリンクL25と、進入車線リンクL1と退出車線リンクL4とを接続するリンクL14と、進入車線リンクL1と退出車線リンクL5とを接続するリンクL15と、が示される。
また、進入車線リンクL9からの右折も可能とすると、進入車線リンクL9と退出車線リンクL4とを接続するリンクL94と、進入車線リンクL9と退出車線リンクL5とを接続するリンクL95と、も更に加わる。
この場合、図7に示したように、リンクL34は、上述したリンクL14、L24、L94と交差するが、リンクL35は、リンクL14、L15、L24、L25、L94、L95と交差する(終端が同じ場合も含む)。つまり、リンクL35の方がリンクL34よりも交差するリンクが多く、リンクL35を走行すると、リンクL14等を走行する車両等と交錯する可能性が生じるため好ましくない。したがって、リンクL34の方がリンクL35よりも優先されるように優先度5a5が設定される。
なお、この交差数は、交差点における信号機の点灯パターンに基づいて数えてもよい。例えば、図7において、進入車線リンクL1〜L3側の信号機が青の場合には、進入車線リンクL9からは右折ができないように進入車線リンクL9側の信号機の点灯パターンが定められている場合は、上述したリンクL94はリンクL34、L35と交差することがなく、リンクL95はリンクL35と交差することがない。したがって、リンクL34の交差数が1つ減少し、リンクL35の交差数が2つ減少することとなる。
3つ目の設定基準としては、交差点及び退出車線に示された交通標識に基づくものが挙げられる。これは、一時停止などの交通標識のデータが地図データ5aに含まれていれば、その交通標識のデータを活用する。例えば、一時停止のある道路に対応する車線リンクは、それが無い道路に対応する車線リンクに比べ優先されないように優先度5a5を設定する。また、交通標識が設置されていなくても、道幅や位置関係(左側の道路が優先など)から法的に優先道路が規定される場合はそれを考慮してもよい。
4つ目の設定基準としては、交差点内リンクを所定の曲線とした際に、当該曲線を経路として走行した場合の走行し易さに基づくものが挙げられる。例えば、走り易いリンクは優先されるように優先度5a5を設定する。走り易さの評価基準としては、例えば、当該交差点内リンクが1つのクロソイド曲線で表現できること、或いは、ある速度で走行した時に発生する各方向の加速度の変化が少ないこと等が挙げられる。
5つ目の設定基準としては、交差点における走行軌跡に基づくものが挙げられる。これは、車線レベルでの挙動が確認可能な、高精度の車両プローブ情報が既に取得されている場合は、その車両プローブ情報の取得されている交差点における、各進入車線から各退出車線への走行台数が分かる。そこで、走行台数の多い経路に対応する交差点内リンクは優先されるように優先度5a5を設定し、少ない経路に対応する交差点内リンクは優先されないように優先度5a5を設定する。また、台数だけでなく、走行に要した時間や速度を評価してもよい。走行時間が長い、或いは走行中の速度の変動が大きい経路に対応する交差点内リンクは、他の経路に対応する交差点内リンクを通る車両との干渉等により走行しづらいリンクと推測し、優先されないように優先度5a5を設定する。或いは、当該経路の走行台数だけでなく、交差する経路の走行台数を併せて評価することにより優先度5a5を設定してもよい。
なお、上述した5つの設定基準は、複数の方法を組み合わせて優先度5a5を算出してもよい。例えば、複数の方法で算出した複数の優先度5a5の平均値を設定してもよいし、各設定基準に重み付けをした加重平均等により優先度5a5を算出してもよい。
また、上述した設定基準で算出された優先度5a5について、所定の値以下の交差点内リンクは、通行する経路として選択される可能性が低いことからリンクテーブル5a1に含めない(削除する)ようにしてもよい。
また、時間帯や曜日によって右左折等の可否や通行量が変化する場合があるため、時間帯や曜日などの条件別に優先度5a5が設定されていてもよい。或いは、大型車、小型車などの車種によって、通り易さや法的な通行可否が変化する場合もあるので、車種別に優先度5a5が設定されていてもよい。
経路探索部3は、上述したような優先度5a5が設定されたリンクテーブル5a1を含む地図データ5aを参照して、入力部2から設定された目的地までの経路を探索する。そして、経路探索部3は、交差点を通過する経路を探索する際には優先度5a5を参照して適切な交差点内リンクを通行するように探索する。
本実施例によれば、地図データ5aは、交差点Iにおける進入車線リンクと退出車線リンクとを接続する交差点内リンクに関するリンクテーブル5a1を含むデータ構造を有し、リンクテーブル5a1には交差点Iにおける優先度5a5が設定されている。このようにすることにより、優先度5a5を参照することによって、交差点Iにおいて、どのリンクを走行する経路とすればよいかを選択することが容易となり、適切に交差点Iを通行することができる。
また、優先度5a5は、対象とする交差点内リンクにおける進入車線リンクから退出車線リンクまでの距離に基づいて設定されていてもよい。このようにすることにより、交差点Iを最短距離で通過することができるリンクを優先的に通行することができるようになる。
また、優先度5a5は、対象とする交差点内リンクにおける他の交差点内リンクとの交差数に基づいて設定されていてもよい。このようにすることにより、交差点Iで他のリンクとの交差数が少ないリンクを優先的に通行することができるようになる。
また、優先度5a5は、交差点Iにおける信号機の点灯パターンに基づいて設定されていてもよい。このようにすることにより、交差点Iで他のリンクとの交差数が多い場合であっても、信号機の点灯パターンにより実際は交差しないリンクを排除して優先度5a5を設定することができる。したがって、交差点Iの状況に見合った通行をすることができる。
また、優先度5a5は、交差点I内及び退出車線に示された交通標識に基づいて設定されていてもよい。このようにすることにより、交通標識を考慮して優先度5a5を設定することができる。
また、優先度5a5は、対象とする交差点内リンクを所定の曲線とした際に、当該曲線を経路として走行した場合の走行し易さに基づいて設定されていてもよい。このようにすることにより、例えば、走行時に加速度の変化が少ない等、走行する車両等の乗員が不快に感じないような経路を走行することができる。
また、優先度5a5は、交差点Iにおける走行軌跡に基づいて設定されていてもよい。このようにすることにより、他車両が走行した軌跡が多いリンクの優先度5a5について優先されるように設定することができる。
また、ナビゲーション装置1は、所定の地点から目的地までの経路を探索する経路探索部3を備え、経路探索部3は、地図データ5aを取得し、地図データ5aに基づいて目的地までの経路を探索する。このようにすることにより、地図データ5aに含まれる優先度5a5を示す情報に基づいて交差点における走行経路を選択することができる。
なお、上述した実施例では、地図データ5aに優先度5a5を含めるようにしていたが、優先度5a5を地図データ5aとは別のデータとして有するようにしてもよい。例えば、優先度のデータには、交差点内リンクのリンクIDと優先度の値を対応付けて設定すれば、別ファイルであっても地図データ5aに含まれる交差点内リンクのリンクIDから優先度を辿ることができる。また、優先度のデータのみを変更する際に地図データ5a全体に更新処理をする必要が無く処理負荷を軽減することが可能となる。
また、上述した実施例では、ナビゲーション装置(経路探索装置)における優先度5a5の利用について説明したが、例えば経路の案内等を行っていない状態で、優先度5a5に基づいた情報を表示部4に表示させるようにしてもよい。例えば、表示部4に地図と現在地を表示した状態で、交差点に差し掛かった際に、直進、左折、右折のそれぞれについて交差点内リンクの優先度を数値や矢印の太さ等で表示する。つまり、経路探索装置ではなく、表示装置に優先度を示す情報を活用してもよい。
図8は、表示部4の表示の一例であり、図3等で示した交差点Iを右に90°反転させて進入車線リンクL1〜L3が下側に表示されるようにしたものである。図8の符号Aは自車の現在位置を示す。そして、自車Aが進入車線リンクL3を走行して交差点Iに進入する際に、進入車線リンクL3から退出可能な退出車線リンクと接続する交差点内リンクを表示し、それぞれに優先度(優先順位)を表示したものである。
図8において、交差点Iを左折する場合は、退出車線リンクL4と接続する交差点内リンクと、退出車線リンクL5と接続する交差点内リンクと、の2つがある。この場合、退出車線リンクL4と接続する交差点内リンクの優先順位が“1”とすると当該リンクを示す矢印の近傍に“1”が表示され、退出車線リンクL5と接続する交差点内リンクの優先順位が“2”とすると当該リンクを示す矢印の近傍に“2”が表示される。
また、図8において、交差点Iを直進する場合は、退出車線リンクL7と接続する交差点内リンクと、退出車線リンクL8と接続する交差点内リンクと、の2つがある。この場合、退出車線リンクL7と接続する交差点内リンクの優先順位が“1”とすると当該リンクを示す矢印の近傍に“1”が表示され、退出車線リンクL8と接続する交差点内リンクの優先順位が“2”とすると当該リンクを示す矢印の近傍に“2”が表示される。
また、図8において、交差点Iを右折する場合は、退出車線リンクL10と接続する交差点内リンクのみである。この場合、退出車線リンクL10と接続する交差点内リンクの優先順位が“1”とすると当該リンクを示す矢印の近傍に“1”が表示される。
したがって、自車Aの運転者は、この表示を参考にして交差点Iにおける経路を決定して走行させることができる。つまり、自動運転以外でも優先度を示す情報を活用することができる。
次に、本発明の第2の実施例にかかる情報処理装置を図9〜図12を参照して説明する。なお、前述した第1の実施例と同一部分には、同一符号を付して説明を省略する。
本実施例にかかる情報処理装置1Aの機能的構成を図9に示す。情報処理装置1Aは、入力部2と、処理部3Aと、出力部4Aと、記憶部5と、を備えている。情報処理装置1Aは、以下の説明では車載機器として説明するが、第1の実施例で説明したナビゲーション装置1と同様に、携帯機器やサーバ装置として構成してもよい。
入力部2と、記憶部5と、は、第1の実施例と同様である。処理部3Aは、後述するセンサ6からの検出情報及びGPS受信機10からの現在位置情報に基づいて、走行すべき車線を選択する。特に、本実施例では、交差点内における進入車線リンクと退出車線リンクとを接続する交差点内リンクのうち、センサ6からの検出情報に基づいて走行経路とすべきリンクを選択する。なお、処理部3Aは、第1の実施例で説明した経路探索部3の機能を有してもよいし、経路探索部3の機能は不図示の別のブロックで実行されていてもよい。
出力部4Aは、処理部3Aで選択されたリンクの情報を例えば自動運転による走行をする場合であれば、自動運転の制御を行う装置等へ出力する。そうでない場合は、第1の実施例と同様に表示部等に処理部3Aで選択されたリンクの情報を表示させてもよい。
センサ6は、例えば車載カメラで構成されている。センサ6を構成する車載カメラは、車両前方の画像を撮像して処理部3Aに出力する。以降は、センサ6としては車載カメラで主に説明するが、ライダやミリ波レーダー等でもよいし、これらのうち複数種類で構成されていてもよい。
また、センサ6としては、車載カメラ等の所定方向の地物等の物体の状況を取得するものに限らず、車両に設置された、車両周囲の降雨や降雪等を検出するレインセンサや車両周囲の明るさを検出する明るさセンサ等をさらに含めてもよい。なお、レインセンサに代えて気象情報を提供しているWebサーバ等にアクセスする構成としてもよい。
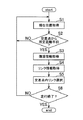
次に、上述した構成の情報処理装置1Aにおける動作(情報処理方法)について図10のフローチャートを参照して説明する。図10に示したフローチャートは処理部3Aで実行される。
まず、ステップS1において、GPS受信機10から処理対象とする車両の現在位置情報を取得する。
次に、ステップS2において、ステップS1で取得した現在位置情報に基づいて現在位置が交差点から所定距離手前か否かを判断する。本実施例では、交差点とは、第1の実施例と同様に、2以上の道路が交わる場合における当該2以上の道路の交わる部分とする。そして、所定距離手前とは、車両Cが図11の交差点に進入する際に交差点の範囲から所定距離離れた位置(図11のd)を示す。この所定距離は、例えば交差点の範囲が見通せる程度の距離とすることが挙げられる。
次に、ステップS3において、環境情報を取得する。環境情報とは、センサ6から出力された撮像画像から得られる情報である。例えば、交差点に設置されている信号機の点灯状態(点灯色、矢印の有無等)、右折待ち等の対向車の有無、或いは、退出車線の駐車車両等の障害物や横断歩道を渡る歩行者等を含めてもよい。さらに、上述したレインセンサから得られる降雨の有無や、明るさセンサから得られる明るさの状態も環境情報に含まれる。即ち、処理部3Aは、交差点における環境情報を取得する環境情報取得部として機能する。
つまり、環境情報は、上述したようなセンサ6が検出する車両外部についての情報であって、信号機の色や対向車の有無のように、動的に状態が変化する情報である。したがって、優先度5a5のように予め設定するのが困難な情報である。換言すると、交差点リンクの走行を妨げる情報、交差点リンクの選択に影響を与えるような情報ともいえる。
次に、ステップS4において、リンク情報を取得する。このリンク情報は、第1の実施例で説明したリンクテーブル5a1である。つまり、本ステップで、交差点内リンクの情報と、優先度を示す情報を取得している。即ち、処理部3Aは、交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報を取得するリンク情報取得部として機能する。なお、ステップS3とS4とは実行順序が逆であってもよい。
次に、ステップS5において、交差点内リンクを選択する。本ステップでは、ステップS4で取得した優先度をステップS3で取得した環境情報を考慮して再算出(変更)し、再算出された優先度に基づいて走行すべき交差点内リンクを選択する。即ち、処理部3Aは、環境情報及び優先度を示す情報に基づいて交差点内リンク情報のうち走行経路とする交差点内リンクを選択する選択部として機能する。
例えば、リンクテーブルには他の交差点内リンクとの交差数で優先度が設定されていた場合、図12に示したような進入車線リンクL3から左折をする際には、第1の実施例では、リンクL34が選択される。しかしながら、同じ方向へ向かう他の車線リンクである進入車線リンクL1、L2に左折する車両が無い場合及び対向する車線である進入車線リンクL9に右折待ちの車両が無い場合や、リンクL9側が赤信号で右折の可能性が無い場合であれば、実質的にリンクL34とリンクL35の交差数は同数と見做せる。したがって、交差数で評価した場合の実質的なリンクL34とリンクL35は同じ優先度となる。
そこで、車載カメラで撮像された画像に基づいて、平行する車線や対向車線の車両の有無や、信号の状態を検出して、リンクL34とリンクL35は同じ優先度となる場合は、他の設定基準、例えば第1の実施例で4つ目の設定基準として説明した、交差点内リンクを所定の曲線とした際に、当該曲線を経路として走行した場合の走行し易さに基づいて優先度を改めて評価し、リンクL35を選択するようにすることができる。勿論他の設定基準により評価してもよい。
次に、ステップS6において、目的地に到着した等により車両の走行が終了か否かを判断し、走行終了の場合はフローチャートを終了し、走行終了でない場合はステップS1へ戻る。
以上の説明から明らかなように、ステップS3が環境情報取得工程、ステップS4がリンク情報取得工程、ステップS5が選択工程として機能する。
なお、本実施例では、リンクテーブル5a1に優先度が含まれていたが、優先度はなくてもよい。その場合は、環境情報のみ(例えば信号機の状態や対向車等の有無)に基づいて交差点内リンクを選択すればよい。
本実施例によれば、情報処理装置1Aは、処理部3Aが、交差点における進入車線リンクと退出車線リンクとを接続する交差点内リンクに関するリンクテーブル5a1を取得し、さらに当該交差点における環境情報を取得する。そして、処理部3Aは、取得した環境情報に基づいて走行経路とする交差点内リンクを選択する。このようにすることにより、現実の交差点における信号機の状態や対向車の有無といった環境情報に基づいて適切なリンクを選択することができる。
また、リンクテーブル5a1には、交差点内リンク毎に当該交差点内リンクの特徴に基づく優先度を示す情報が設定されており、処理部3Aは、環境情報及び優先度を示す情報に基づいて交差点内リンクのうち走行経路とする交差点内リンクを選択している。このようにすることにより、優先度を示す情報に環境情報を考慮して通行するリンクを選択することができる。
また、処理部3Aは、走行し易い交差点内リンクを走行経路として選択するようにしている。このようにすることにより、環境情報に基づいて加速度の変化の少ない等、走行する車両等の乗員が不快に感じないような経路を通行することができる。
また、本発明は上記実施例に限定されるものではない。即ち、当業者は、従来公知の知見に従い、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。かかる変形によってもなお本発明の地図データを具備する限り、勿論、本発明の範疇に含まれるものである。
1 ナビゲーション装置(経路探索装置)
1A 情報処理装置
3 経路探索部(地図データ記憶装置)
3A 処理部(リンク情報取得部、環境情報取得部、選択部)
4 表示部
5 記憶部
5a 地図データ
5a1 リンクテーブル(リンク情報)
5a5 優先度
1A 情報処理装置
3 経路探索部(地図データ記憶装置)
3A 処理部(リンク情報取得部、環境情報取得部、選択部)
4 表示部
5 記憶部
5a 地図データ
5a1 リンクテーブル(リンク情報)
5a5 優先度
Claims (6)
- 交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報を取得するリンク情報取得部と、
前記交差点における環境情報を取得する環境情報取得部と、
前記環境情報取得部が取得した前記環境情報に基づいて走行経路とする前記交差点内リンクを選択する選択部と、
を備えることを特徴とする情報処理装置。 - 前記リンク情報には、前記交差点内リンク毎に優先度を示す情報が設定されており、
前記選択部は、前記環境情報及び前記優先度を示す情報に基づいて前記交差点内リンクのうち前記走行経路とする前記交差点内リンクを選択することを特徴とする請求項1に記載の情報処理装置。 - 前記選択部は、走行し易い前記交差点内リンクを前記走行経路として選択することを特徴とする請求項1または2に記載の情報処理装置。
- 交差点における進入車線を示すリンクと退出車線を示すリンクとを接続する交差点内リンクに関するリンク情報に基づいて所定の処理を行う情報処理装置で実行される情報処理方法であって、
前記リンク情報を取得するリンク情報取得工程と、
前記交差点における環境情報を取得する環境情報取得工程と、
前記環境情報取得工程で取得した前記環境情報に基づいて走行経路とする前記交差点内リンクを選択する選択工程と、
を含むことを特徴とする情報処理方法。 - 請求項4に記載の情報処理方法を、コンピュータにより実行させることを特徴とする情報処理プログラム。
- 請求項5に記載の情報処理プログラムを格納したことを特徴とするコンピュータ読み取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018128981A JP2020008401A (ja) | 2018-07-06 | 2018-07-06 | 情報処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018128981A JP2020008401A (ja) | 2018-07-06 | 2018-07-06 | 情報処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020008401A true JP2020008401A (ja) | 2020-01-16 |
Family
ID=69151430
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018128981A Pending JP2020008401A (ja) | 2018-07-06 | 2018-07-06 | 情報処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020008401A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021157253A (ja) * | 2020-03-25 | 2021-10-07 | パイオニア株式会社 | 情報処理装置 |
| WO2022044486A1 (ja) * | 2020-08-28 | 2022-03-03 | 株式会社アイシン | 運転支援装置及びコンピュータプログラム |
| JP2022143818A (ja) * | 2021-03-18 | 2022-10-03 | 日産自動車株式会社 | 走行支援方法および走行支援装置 |
-
2018
- 2018-07-06 JP JP2018128981A patent/JP2020008401A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021157253A (ja) * | 2020-03-25 | 2021-10-07 | パイオニア株式会社 | 情報処理装置 |
| WO2022044486A1 (ja) * | 2020-08-28 | 2022-03-03 | 株式会社アイシン | 運転支援装置及びコンピュータプログラム |
| JP2022039518A (ja) * | 2020-08-28 | 2022-03-10 | 株式会社アイシン | 運転支援装置及びコンピュータプログラム |
| JP7443992B2 (ja) | 2020-08-28 | 2024-03-06 | 株式会社アイシン | 運転支援装置及びコンピュータプログラム |
| JP2022143818A (ja) * | 2021-03-18 | 2022-10-03 | 日産自動車株式会社 | 走行支援方法および走行支援装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6197691B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP2023153240A (ja) | 経路探索装置 | |
| JP6273864B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6467773B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP6390276B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6545507B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6488594B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6331984B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6287264B2 (ja) | 経路案内システム、経路案内方法及びコンピュータプログラム | |
| JP6269105B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP7405012B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP6303540B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP6520558B2 (ja) | 経路探索システム、経路探索方法及びコンピュータプログラム | |
| JP2015141476A (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP2017181391A (ja) | コスト算出データのデータ構造 | |
| JP6330550B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JPWO2018151005A1 (ja) | 走行支援装置及びコンピュータプログラム | |
| JP2015141054A (ja) | 経路案内システム、経路案内方法及びコンピュータプログラム | |
| JP6914350B2 (ja) | 車線案内システムおよび車線案内プログラム | |
| JP2015184110A (ja) | ナビゲーション装置及び車両制御システム | |
| JP7528450B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2020008401A (ja) | 情報処理装置 | |
| JP2017181392A (ja) | 経路探索装置及びコンピュータプログラム | |
| JP4736714B2 (ja) | ナビゲーション装置 | |
| JP7119981B2 (ja) | 運転支援装置および該方法 |