JP2020009352A - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP2020009352A JP2020009352A JP2018132162A JP2018132162A JP2020009352A JP 2020009352 A JP2020009352 A JP 2020009352A JP 2018132162 A JP2018132162 A JP 2018132162A JP 2018132162 A JP2018132162 A JP 2018132162A JP 2020009352 A JP2020009352 A JP 2020009352A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- railroad crossing
- control device
- unit
- clearance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18159—Traversing an intersection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0017—Planning or execution of driving tasks specially adapted for safety of other traffic participants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
A1.装置構成:
図1に示す車両制御装置10は、車両100に搭載され、車両100を制御する。本実施形態において、車両100を他の車輌と区別するため、「自車両100」とも呼ぶ。車両100は、自動運転と手動運転とを切り替え可能に構成されている。自動運転とは、車両100の走行に関する制御の少なくとも一部が運転者の判断によらずに自動的に実行される運転を意味する。自動運転としては、例えば、SAE(Society of Automotive Engineers)において規定されているレベル0〜5までの運転レベルのうち、レベル2〜5の運転が該当する。手動運転とは、車両の走行に関する制御の少なくとも一部が運転者の判断および操作により実行される運転を意味する。例えば、SAEにおけるレベル0〜2の運転が該当する。車両100には、車両制御装置10に加えて、動作制御部30、動作実行部40、センサ群50、ナビゲーション装置60、表示部70、無線通信部80が搭載されている。
自車両100が自動運転中において、踏切の近傍まで至ると、車両制御装置10により踏切通過処理が実行される。より具体的には、本実施形態では、ミリ波センサ51および撮像カメラ53の検出結果に基づき、踏切の標識が検出され、その後、踏切の停止線から所定の距離だけ手前の位置に達すると、踏切通過処理が開始される。なお、GNSSセンサ55により検出される自車両100の現在位置が、設定された走路における踏切から所定の距離だけ手前の位置に達したことを契機として、踏切通過処理が実行されてもよい。
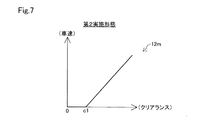
図6に示す第2実施形態の車両制御装置10aは、CPU11が車速決定部115として機能する点と、メモリ12に予め車速マップ12mが記憶されている点とにおいて、図1に示す第1実施形態の車両制御装置10と異なる。第2実施形態の車両制御装置10aのその他の構成は、車両制御装置10と同じであるので、同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
図9に示す第3実施形態の車両制御装置10bは、CPU11が走行長さ特定部116として機能する点において、図6に示す第2実施形態の車両制御装置10aと異なる。第3実施形態の車両制御装置10bのその他の構成は、車両制御装置10aと同じであるので、同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
図12に示す第4実施形態の車両制御装置10cは、CPU11が代替走路特定部117および代替走路提示部118として機能する点において、図9に示す第3実施形態の車両制御装置10bと異なる。第4実施形態の車両制御装置10cのその他の構成は、車両制御装置10bと同じであるので、同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
図15に示す第5実施形態の車両制御装置10dは、CPU11が通過完了判定部119、空スペース特定部120、および報知部121として機能する点において、図12に示す第4実施形態の車両制御装置10cと異なる。第5実施形態の車両制御装置10dのその他の構成は、車両制御装置10cと同じであるので、同一の構成要素には同一の符号を付し、その詳細な説明を省略する。
F1.他の実施形態1:
各実施形態では、踏切900内に歩行者や自転車などの障害物が存在する場合に、かかる障害物の幅方向の端部をクリアランス算出の際の端部としていたが、本開示はこれに限定されない。障害物の種類に応じて、各障害物に対して所定の大きさのマージンを設定し、かかるマージンを含めた領域の端部を、クリアランス算出の際の端部としてもよい。例えば、図17の例では、各歩行者m1〜m3に対しては、所定の大きさの円形のマージンAraが設定され、自転車b1には、所定の大きさの円形のマージンArbが設定されている。このため、図17の例では、最小クリアランスCLminは、自転車b1のマージンArbを含む円形領域と、歩行者m3のマージンAraを含む円形領域との交差方向の距離に相当する。かかる構成において、例えば、急激に位置を変化し得る自転車b1のマージンArbを、歩行者m1〜m3のマージンAraよりも大きくしてもよい。また、これとは反対に、移動速度が遅い歩行者m1〜m3のマージンAraを、移動速度が速い自転車b1のマージンArbよりも大きくしてもよい。
各実施形態では、クリアランスは、時々刻々と変化するクリアランスのうち、各時刻における最小クリアランスが時系列的に算出されて記憶されていたが、本開示はこれに限定されない。例えば、平均クリアランスが時系列的に算出されて記憶されてもよい。この構成では、かかる平均クリアランスを利用して、通過可否判定、および通過速度決定が行なわれてもよい。また、例えば、ステップS130が実行される時点における最小クリアランスのみが算出されてメモリ12に記憶されてもよい。この構成では、障害物の速度および加速度は、クリアランスの算出に考慮されないこととなる。
各実施形態では、通過可能範囲の右端を、対向車両の有無に応じて異なる位置(白線712またはセンターライン710)に設定していたが、対向車両の有無に関わらず、一定の位置としてもよい。例えば、白線712の位置、又はセンターライン710の位置に固定してもよい。
第3ないし第5実施形態では、踏切900の長さを、無線通信部80を介した無線通信により踏切制御装置600から取得していたが、本開示はこれに限定されない。センサ群50の検出結果を利用して踏切900の長さを特定してもよい。例えば、撮像カメラ53により得られる撮像画像を解析して、車線Ln1における踏切900の手前の停止線と、車線Ln2における踏切900の手前の停止線との間の距離を求め、かかる距離を踏切900の長さとして特定してもよい。また、例えば、車線Ln1における踏切900の手前側の遮断機と奥側の遮断機とを、撮像画像やLiDAR52の検出結果などから特定し、かかる遮断機間の距離を、踏切900の長さとして特定してもよい。
第1および第2実施形態では、クリアランスを算出する際に用いられる「車両100が踏切900を通過するのに要する時間」は、30秒の固定値であったが、本開示はこれに限定されない。例えば、第3実施形態の通過所要時間を算出するのと同様に、設定されている通過速度と踏切900の長さとから、「車両100が踏切900を通過するのに要する時間」を算出してもよい。かかる構成によれば、クリアランス(最小クリアランス)をより正確に特定できる。
第4および第5実施形態では、代替走路の方がより早く目的地に到着する場合に代替経路を提示していたが、代替走路の方がより遅く目的地に到着する場合、または、同じ時刻に到着する場合にも代替走路を提示してもよい。
各実施形態では、ステップS135において、車両100が踏切900を安全に通過できないと判定された場合(ステップS135:NO)、自動運転から手動運転に切替えていたが(ステップS140)、本開示はこれに限定されない。この場合、ステップS105に戻るようにしてもよい。かかる構成によれば、ステップS135において自車両100が踏切900を安全に通過できると判定されるまで、自車両100は停止線において停止したままとなる。かかる構成とすることにより、安全性を向上できる。
各実施形態では、ステップS140において、自車両100の走行に関する動作機能の全ての制御を利用者(運転者)に委譲していたが、これに代えて、一部の制御のみを利用者に委譲してもよい。例えば、アクセルの制御のみを利用者に委譲してもよい。
第3ないし第5実施形態のステップS152において、現在時刻から踏切が閉じる時刻までの時間が、踏切通過所要時間よりも長い場合には、踏切900を通過可能であると判定し、踏切通過所要時間以下の場合には踏切900を通過可能でないと判定していたが、本開示はこれに限定されない。例えば、現在時刻から踏切が閉じる時刻に所定のマージンを加えた時間が、踏切通過所要時間よりも長い場合には、踏切900を通過可能であると判定し、短い場合には踏切900を通過可能でないと判定してもよい。すなわち、一般には、走行長さと通過速度とに基づき、踏切通過所要時間を算出し、算出された踏切通過所要時間が予め定められた閾値時間以下である場合に前記踏切を通過可能であると判定してもよい。
第4および第5実施形態において、ステップS170を省略してもよい。すなわち、オーバライドの有無に関わらす代替走路の検索および提示と、代替走路への移動とを行ってもよい。
第5実施形態において、報知部121およびステップS182およびS184を省略してもよい。また、第5実施形態において、ステップS186〜S190を省略してもよい。
各実施形態では、踏切900内に白線711、712およびセンターライン710が配されていたが、これらが省略されていてもよい。かかる構成においては、例えば、撮像カメラ53で得られた撮像画像に基づいて踏切900内の道路端やセンターラインを推定し、推定された道路端およびセンターラインを利用して通過可能領域を設定してもよい。具体的には、以下のように道路端を特定してもよい。踏切900内にて車両が走行可能な領域は舗装されており、それ以外の領域は舗装されていない場合が多い。そこで、撮像画像に基づき、舗装された道路であるか否かを検出することにより道路端を推定してもよい。舗装された領域と舗装されていない領域との境界は、撮像画像においてエッジとして検出され易くなる。このため、かかるエッジを検出して道路端として推定できる。なお、上記のようにして推定された両側の道路端の間を走行路として判断してもよいし、両側の道路端から所定のマージンだけ内側の位置の間の領域を走行路として判断してもよい。また、上記のように、舗装された領域と舗装されていない領域との境界を利用した道路端の推定の他にも、踏切900を渡った先の道路、すなわち、自車両100が走行予定の道路に白線が引かれている構成においては、かかる白線を手前側に仮想的に延長させ、その仮想的な白線を道路端として推定してもよい。また、このようにして特定された道路端を利用して通過可能領域を設定してもよい。
各実施形態において、ハードウェアによって実現されていた構成の一部をソフトウェアに置き換えるようにしてもよく、逆に、ソフトウェアによって実現されていた構成の一部をハードウェアに置き換えるようにしてもよい。例えば、障害物検出部110、クリアランス算出部111、通過可否判定部112、走行制御部113、運転切替部114、車速決定部115、走行長さ特定部116、代替走路特定部117、代替走路提示部118、通過完了判定部119、空スペース特定部120、報知部121のうちの少なくとも1つの機能部を、集積回路、ディスクリート回路、またはそれらの回路を組み合わせたモジュールにより実現してもよい。また、本開示の機能の一部または全部がソフトウェアで実現される場合には、そのソフトウェア(コンピュータプログラム)は、コンピューター読み取り可能な記録媒体に格納された形で提供することができる。「コンピューター読み取り可能な記録媒体」とは、フレキシブルディスクやCD−ROMのような携帯型の記録媒体に限らず、各種のRAMやROM等のコンピューター内の内部記憶装置や、ハードディスク等のコンピューターに固定されている外部記憶装置も含んでいる。すなわち、「コンピューター読み取り可能な記録媒体」とは、データパケットを一時的ではなく固定可能な任意の記録媒体を含む広い意味を有している。
Claims (11)
- 車両(100)に搭載され、前記車両を制御する車両制御装置(10:10a〜10d)であって、
車両に搭載されているセンサ(50)の検出結果を利用して、前記車両の走行路(Ln1)と交差する踏切(900)の内部に存在する障害物を検出する障害物検出部(110)と、
前記障害物検出部による検出結果を利用して、前記障害物の位置および大きさを特定し、特定された前記障害物の位置および大きさを利用して、前記車両が前記踏切を渡る際の前記走行路と交差する方向のクリアランスを算出するクリアランス算出部(111)と、
算出された前記クリアランスに基づき前記車両による前記踏切の通過可否を判定する通過可否判定部(112)と、
を備える、車両制御装置。 - 請求項1に記載の車両制御装置において、
前記センサは、前記障害物の大きさと位置と速度と加速度とのうちの少なくとも1つを検出し、
クリアランス算出部は、前記センサにより検出された値を利用して、前記車両が前記踏切を通過する際の前記クリアランスを時系列的に算出し、
前記通過可否判定部は、前記車両が前記踏切を通過する期間の全体に亘って前記クリアランスが予め定められた大きさ以上である場合に、前記踏切を通過可能であると判定する、車両制御装置。 - 請求項1に記載の車両制御装置において、
算出された前記クリアランスに応じて、前記車両が前記踏切を通過する際の車速である通過速度を決定する車速決定部(115)と、
決定された前記車速で前記車両を走行させる走行制御部(113)と、
前記車両が前記踏切を通過する際の走行長さを特定する走行長さ特定部(116)と、
をさらに備え、
前記通過可否判定部は、特定された前記走行長さと、決定された前記通過速度とに基づき、前記踏切を通過するのに要する通過所要時間を算出し、算出された前記通過所要時間が予め定められた閾値時間以下である場合に、前記踏切を通過可能であると判定する、車両制御装置。 - 請求項1から請求項3までのいずれか一項に記載の車両制御装置において、
前記踏切を通過しない走路である代替走路を特定する代替走路特定部(117)と、
特定された前記代替走路を提示する代替走路提示部(118)と、
をさらに備え、
前記代替走路提示部は、前記通過可否判定部により前記踏切を通過可能でないと判定された場合に、前記代替走路を提示する、車両制御装置。 - 請求項1から請求項4までのいずれか一項に記載の車両制御装置において、
前記車両の走行を制御する走行制御部をさらに備え、
前記走行制御部は、前記通過可否判定部により前記踏切を通過可能でないと判定された場合に、前記車両を停車させて前記踏切の通過を行わせない、車両制御装置。 - 請求項1から請求項4までのいずれか一項に記載の車両制御装置において、
前記車両の運転に関わる動作機能のうちの少なくとも一部の制御を、前記車両の運転者に委譲させる運転切替部(114)をさらに備え、
前記運転切替部は、前記通過可否判定部により前記踏切を通過可能でないと判定された場合に、前記動作機能のうちの少なくとも一部の制御を、前記運転者に委譲させる、車両制御装置。 - 請求項1から請求項6までのいずれか一項に記載の車両制御装置において、
前記車両が前記踏切を通過中において、前記センサの検出結果を利用して、前記踏切を通過した先の前記走行路における空きスペースの有無に基づき、前記踏切の通過を、完了可能か否かを判定する通過完了判定部(119)と、
前記センサの検出結果を利用して、前記踏切を通過した先の前記走行路の対向車線における空きスペースと、前記走行路における後方側の前記踏切の外の空きスペースと、の有無をそれぞれ特定する空きスペース特定部(120)と、
前記車両の走行を制御する走行制御部と、
をさらに備え、
前記走行制御部は、前記通過完了判定部により前記踏切の通過を完了できないと判定された場合であって、前記空きスペース特定部により前記対向車線における前記空きスペースと、前記踏切の外の前記空きスペースとのうち、少なくとも一方が存在する場合には、該空きスペースに前記車両を移動させる、車両制御装置。 - 請求項1から請求項7までのいずれか一項に記載の車両制御装置において、
前記車両が前記踏切を通過中において、前記センサの検出結果を利用して、前記踏切を通過した先の前記走行路における空きスペースの有無に基づき、前記踏切の通過を、完了可能か否かを判定する通過完了判定部と、
前記踏切を管理する組織に対する報知を実行する報知部(121)と、
を備え、
前記報知部は、前記踏切の通過を完了できないと判定された場合に、前記報知を実行する、車両制御装置。 - 請求項1から請求項8までのいずれか一項に記載の車両制御装置において、
前記クリアランス算出部は、検出された前記交差する方向の前記障害物の大きさに対して、予め定められたマージンを加えた大きさを、前記障害物の大きさとして用いて、前記クリアランスを算出する、車両制御装置。 - 車両(100)に搭載され、前記車両を制御する車両制御装置(10:10a〜10d)であって、
前記車両の周囲に存在する障害物を検出するセンサ(10:10a〜10d)の検出結果を利用して、前記車両の走行路と交差する踏切の内部に存在する前記障害物の位置および大きさを特定し、特定された前記障害物の位置および大きさを利用して、前記車両が前記踏切を渡る際の前記走行路と交差する方向のクリアランスを算出するクリアランス算出部(111)と、
算出された前記クリアランスを利用して、前記車両が前記踏切を通過する際の車速である通過速度を決定する車速決定部(115)と、
を備える、車両制御装置。 - 請求項10に記載の車両制御装置において、
前記車速決定部は、算出された前記クリアランスが小さいほど、前記通過速度として低い車速を決定する、車両制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132162A JP7103000B2 (ja) | 2018-07-12 | 2018-07-12 | 車両制御装置 |
| PCT/JP2019/024287 WO2020012900A1 (ja) | 2018-07-12 | 2019-06-19 | 車両制御装置 |
| DE112019003534.7T DE112019003534T5 (de) | 2018-07-12 | 2019-06-19 | Fahrzeugsteuervorrichtung |
| US17/144,028 US12466441B2 (en) | 2018-07-12 | 2021-01-07 | Vehicle control apparatus for negotiating grade crossings |
| US19/224,353 US20250289476A1 (en) | 2018-07-12 | 2025-05-30 | Vehicle control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132162A JP7103000B2 (ja) | 2018-07-12 | 2018-07-12 | 車両制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020009352A true JP2020009352A (ja) | 2020-01-16 |
| JP2020009352A5 JP2020009352A5 (ja) | 2020-10-22 |
| JP7103000B2 JP7103000B2 (ja) | 2022-07-20 |
Family
ID=69141824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018132162A Active JP7103000B2 (ja) | 2018-07-12 | 2018-07-12 | 車両制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US12466441B2 (ja) |
| JP (1) | JP7103000B2 (ja) |
| DE (1) | DE112019003534T5 (ja) |
| WO (1) | WO2020012900A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2937122B2 (ja) | 1996-05-17 | 1999-08-23 | 住友金属工業株式会社 | 単結晶引上げ方法 |
| JP3474076B2 (ja) | 1997-03-31 | 2003-12-08 | 株式会社スーパーシリコン研究所 | 単結晶引上げ装置 |
| JP2022099971A (ja) * | 2020-12-23 | 2022-07-05 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | ライダー支援システムの制御装置及び制御方法 |
| US12187319B2 (en) | 2021-10-29 | 2025-01-07 | Tusimple, Inc. | Autonomous vehicle navigation in response to a stopped vehicle at a railroad crossing |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005202678A (ja) * | 2004-01-15 | 2005-07-28 | Nissan Motor Co Ltd | 走行支援装置 |
| JP2006039928A (ja) * | 2004-07-27 | 2006-02-09 | Nec Fielding Ltd | 車両進入可否判定システム、装置、プログラム、及びその方法 |
| JP2018005386A (ja) * | 2016-06-29 | 2018-01-11 | 京セラ株式会社 | 走行支援装置、走行支援方法、撮像装置、及び車両 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1475765A3 (de) * | 2003-05-08 | 2006-05-24 | Robert Bosch Gmbh | Vorrichtung zur Bestimmung einer Durchfahrtsmöglichkeit für ein Fahrzeug |
| JP4230341B2 (ja) * | 2003-12-02 | 2009-02-25 | 富士通テン株式会社 | 運転支援装置 |
| JP2005326963A (ja) * | 2004-05-12 | 2005-11-24 | Fujitsu Ten Ltd | 運転支援装置 |
| DE102010012954A1 (de) | 2010-03-25 | 2011-09-29 | Daimler Ag | Verfahren zum Betrieb einer Fahrerassistenzvorrichtung und Fahrerassistenzvorrichtung |
| US9607519B2 (en) * | 2011-06-22 | 2017-03-28 | Nissan Motor Co., Ltd. | Vehicle driving control system |
| JP5563025B2 (ja) * | 2012-03-28 | 2014-07-30 | 本田技研工業株式会社 | 踏切遮断機推定装置及び車両 |
| WO2015116950A1 (en) * | 2014-01-30 | 2015-08-06 | Anna Clarke | Systems and methods for lane end recognition |
| JP6304086B2 (ja) | 2015-03-23 | 2018-04-04 | トヨタ自動車株式会社 | 自動運転装置 |
| JP2017004214A (ja) | 2015-06-09 | 2017-01-05 | 三菱電機株式会社 | 運転支援装置および運転支援システム |
| JP6447431B2 (ja) * | 2015-09-09 | 2019-01-09 | 株式会社デンソー | 車両制御装置 |
| JP2018001962A (ja) | 2016-07-01 | 2018-01-11 | 本田技研工業株式会社 | 車両制御装置 |
| JP2019532292A (ja) * | 2016-09-29 | 2019-11-07 | ザ・チャールズ・スターク・ドレイパー・ラボラトリー・インコーポレイテッド | 車両位置特定の自律走行車両 |
| WO2018179359A1 (ja) * | 2017-03-31 | 2018-10-04 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP6645001B2 (ja) * | 2017-09-08 | 2020-02-12 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP6791093B2 (ja) * | 2017-10-23 | 2020-11-25 | 株式会社デンソー | 自動運転制御装置、車両の自動運転制御方法 |
| EP3802254B1 (en) * | 2018-05-31 | 2024-07-10 | Nissan North America, Inc. | Trajectory planning |
| US11940798B2 (en) * | 2018-07-06 | 2024-03-26 | Toyota Research Institute, Inc. | System, method, and computer-readable medium for an autonomous vehicle to pass a bicycle |
-
2018
- 2018-07-12 JP JP2018132162A patent/JP7103000B2/ja active Active
-
2019
- 2019-06-19 DE DE112019003534.7T patent/DE112019003534T5/de active Pending
- 2019-06-19 WO PCT/JP2019/024287 patent/WO2020012900A1/ja not_active Ceased
-
2021
- 2021-01-07 US US17/144,028 patent/US12466441B2/en active Active
-
2025
- 2025-05-30 US US19/224,353 patent/US20250289476A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005202678A (ja) * | 2004-01-15 | 2005-07-28 | Nissan Motor Co Ltd | 走行支援装置 |
| JP2006039928A (ja) * | 2004-07-27 | 2006-02-09 | Nec Fielding Ltd | 車両進入可否判定システム、装置、プログラム、及びその方法 |
| JP2018005386A (ja) * | 2016-06-29 | 2018-01-11 | 京セラ株式会社 | 走行支援装置、走行支援方法、撮像装置、及び車両 |
Non-Patent Citations (1)
| Title |
|---|
| 金野祥子: "踏切事故発生メカニズムの検討(1)−自動車ドライバーの事故に対する質問紙調査の結果−", 人間工学, vol. 第29巻特別号, JPN6019032846, 16 May 1993 (1993-05-16), pages 362 - 363, ISSN: 0004726619 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250289476A1 (en) | 2025-09-18 |
| JP7103000B2 (ja) | 2022-07-20 |
| US20210129867A1 (en) | 2021-05-06 |
| WO2020012900A1 (ja) | 2020-01-16 |
| US12466441B2 (en) | 2025-11-11 |
| DE112019003534T5 (de) | 2021-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112644494B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN110895417B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN108369102B (zh) | 协助机动车驾驶员绕过环岛 | |
| JP6547836B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6414221B2 (ja) | 車両の走行制御装置及び方法 | |
| US20250289476A1 (en) | Vehicle control apparatus | |
| US10983516B2 (en) | Vehicle control system | |
| CN107848533A (zh) | 车辆控制装置、车辆控制方法及车辆控制程序 | |
| US11449060B2 (en) | Vehicle, apparatus for controlling same, and control method therefor | |
| JP2019121307A (ja) | 信号機認識装置、及び自動運転システム | |
| CN112747765A (zh) | 一种基于导航与传感器融合的路径推送方法、系统及存储介质 | |
| CN108473134A (zh) | 车辆控制装置、车辆控制方法及车辆控制程序 | |
| CN107836018A (zh) | 车辆控制装置、车辆控制方法及车辆控制程序 | |
| US11747815B2 (en) | Limiting function of a vehicle control device related to defective image | |
| JP2023165746A (ja) | 車両用表示装置、および車両用表示プログラム | |
| WO2023090203A1 (ja) | 自動運行装置、車両制御方法 | |
| US20240270280A1 (en) | Automated travel device | |
| US20210171060A1 (en) | Autonomous driving vehicle information presentation apparatus | |
| US20210171065A1 (en) | Autonomous driving vehicle information presentation apparatus | |
| CN115884909A (zh) | 行驶辅助方法、以及行驶辅助装置 | |
| CN113401056B (zh) | 显示控制装置、显示控制方法以及计算机可读取存储介质 | |
| US20250249929A1 (en) | Vehicle control device and vehicle control method | |
| JP2023005767A (ja) | 経路制御装置及び経路制御方法 | |
| JP7616185B2 (ja) | 自動運行装置 | |
| JP7347476B2 (ja) | 車両用表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200909 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220620 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7103000 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |