JP2020022019A - 車両システム - Google Patents
車両システム Download PDFInfo
- Publication number
- JP2020022019A JP2020022019A JP2018143091A JP2018143091A JP2020022019A JP 2020022019 A JP2020022019 A JP 2020022019A JP 2018143091 A JP2018143091 A JP 2018143091A JP 2018143091 A JP2018143091 A JP 2018143091A JP 2020022019 A JP2020022019 A JP 2020022019A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- transmission
- electronic control
- failure diagnosis
- response
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Small-Scale Networks (AREA)
Abstract
【課題】車載用ECU(電子制御装置)から故障診断ツールへ送信される応答メッセージが増加し、ネットワークが高負荷となった場合でも、CAN上で通信されるデータ量を減らし、車載用ECUから応答可能とする。
【解決手段】車両を制御する複数の電子制御装置3と、複数の電子制御装置3が接続される車載ネットワーク2と、車載ネットワーク2を介して電子制御装置3から周期的に制御用データを送信する送信部と、車両の故障診断を行う診断部5と、周期的な送信要求を受信した電子制御装置3の故障診断の結果を周期的に応答する応答部と、故障診断の結果の応答時に車載ネットワーク2の負荷が高い場合、他の電子制御装置3に対する送信の抑制命令をする命令部と、抑制命令を送信した電子制御装置3、及び抑制命令を受信した他の電子制御装置3は、制御用データを送信する周期を長くする。
【選択図】図1
【解決手段】車両を制御する複数の電子制御装置3と、複数の電子制御装置3が接続される車載ネットワーク2と、車載ネットワーク2を介して電子制御装置3から周期的に制御用データを送信する送信部と、車両の故障診断を行う診断部5と、周期的な送信要求を受信した電子制御装置3の故障診断の結果を周期的に応答する応答部と、故障診断の結果の応答時に車載ネットワーク2の負荷が高い場合、他の電子制御装置3に対する送信の抑制命令をする命令部と、抑制命令を送信した電子制御装置3、及び抑制命令を受信した他の電子制御装置3は、制御用データを送信する周期を長くする。
【選択図】図1
Description
本発明は、車両システムに関する。
本技術分野の背景技術として、特開2003−256033号公報(特許文献1)がある。特許文献1の要約欄には、「車両内に配線された車両内LANのバス10には多数のECU、すなわちECU1,ECU2,ECU3,・・・が接続されており、各ECU間は相互に通信可能となっている。ECU1には故障診断ツール20が接続され、ECU1は故障診断ツール20より要求メッセージを受信し当該要求メッセージをECU2等に送信すると共にECU2等からの応答を故障診断ツール20に返信する。ECU1は、故障診断ツール20から要求されると事前に分かっている項目について故障診断ツール20からの要求に関係なく要求メッセージをECU2等に送信し、その応答の結果を保存する。」と記載されている。
故障診断ツールからの要求メッセージには一度の要求メッセージに対し、一定の周期で故障診断情報を応答する場合、複数の車載用ECUから故障診断ツールへ一斉に応答を送信する。そのため、ネットワークに定期的に送信される車両制御用のデータを含め、大量のデータが送信されネットワークが高負荷となり、車載用ECUからの応答に遅れが生じる。さらに、一定の周期での応答が出来なく、故障診断情報に欠けが生じる可能性がある。
そこで、本発明は、上記課題に鑑みてなされたものであり、車載用ECUから故障診断ツールへ送信される応答メッセージが増加し、ネットワークが高負荷となった場合でも、CAN上で通信されるデータ量を減らし、車載用ECUから応答可能とするものである。
例えば、上記課題を解決するために、車両を制御する複数の電子制御装置と、複数の前記電子制御装置が接続される車載ネットワークと、前記車載ネットワークを介して前記電子制御装置から周期的に制御用データを送信する送信部と、前記車両の故障診断を行う診断部と、周期的な送信要求を受信した前記電子制御装置の前記故障診断の結果を周期的に応答する応答部と、前記故障診断の結果の前記応答時に前記車載ネットワークの負荷が高い場合、前記他の電子制御装置に対する送信の抑制命令をする命令部と、前記抑制命令を送信した前記電子制御装置、及び前記抑制命令を受信した前記他の電子制御装置は、制御用データを送信する周期を長くする。
本発明によれば、CAN上で通信されるデータ量を減らし、ネットワークの負荷を低下させ、車載用ECUからの応答を可能とする。本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の、課題、構成及び効果は、以下の実施例の説明により明らかにされる。
以下、添付図面を参照して本発明の実施例について説明する。添付図面は本発明の原理に則った具体的な実施例を示しているが、これらは本発明の理解のためのものであり、本発明を限定的に解釈するために用いられるものではない。
車両には車載用ECU(Electronic Control Unit、電子制御装置)が複数搭載され、それぞれがCAN(Controller Area Network)等の車載ネットワークにより接続される。車両診断の際には故障診断ツール(診断部)が車載ネットワークに接続され、故障診断ツールと各車載用ECUとダイアログ通信を行う事により、各車載用ECUが自己診断した故障情報などを故障診断ツールに送信する。
故障診断ツールは各車載用ECUに対し、故障診断に必要なデータを要求するメッセージを送信する。各車載用ECUは要求メッセージを故障診断ツールより受信したら、要求メッセージにて要求された故障診断情報を故障診断ツールに対し応答する。
車載用ECUは協調動作する為、CAN等の車載ネットワークは診断だけでなく、車両制御に必要な車速やエンジン回転数などの情報を通信する為にも使用される。車両制御に必要な情報の通信は、任意周期での送信で行われる。
CANネットワークによる通信では、ISO(International Organization for Standardization)11898−1の規定により、データ内容や送信ノードを識別するためにID(識別子)が使用され、通信調停の優先順位を決定する働きをする。通信調停の優先順位は、IDの値が小さい方が高くなるよう規定されている。
例えば、複数の車載用ECUより同時に送信が行われた場合、小さいIDが優先的に送信され、送信が完了次第、大きいIDが送信される。
以下の実施例は、車両の動作を制御する際に利用される、車載ネットワークにおいて通信されるデータ量を減らし、車載用ECUから応答する時間を確保することを可能とする技術に関する。
以下の実施例は、故障診断ツールからの要求メッセージが送信された時にネットワークが高負荷の状態となり、車載用ECUが応答出来なくなった場合、車載用ECUは他の車載用ECUが送信しているIDよりも優先順位の高い任意のIDにて他の車載用ECUに対しCAN送信を抑制するメッセージを送信する。他の車載用ECUはメッセージを受信後、車両制御に使用しているデータの内、送信周期を伸ばしても影響の出ない情報の周期を伸ばす事により、ネットワークの負荷を低下させる技術とを備える車載用制御装置が可能となる。
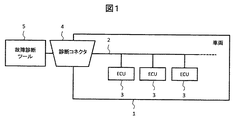
図1は、車載ネットワークシステムの構成を示すブロック図である。車載ネットワークシステムは、車両1に搭載されたバス2、バス2により接続された車両を制御する為のECU5、車両1の車両ネットワークと故障診断ツール5を接続する接続する為の診断コネクタ4を含むように構成されている。
また、車載ネットワーク(バス2)を介して電子制御装置3から周期的に制御用データを送信する送信部(図示しない)、周期的な送信要求を受信した電子制御装置3の故障診断の結果を周期的に応答する応答部(図示しない)、故障診断の結果の応答時に車載ネットワークの負荷が高い場合、他の電子制御装置3に対する送信の抑制命令をする命令部(図示しない)を有する。
ECU3は、内部にCPU、ROM、RAM、CANコントローラを備えている。ROMは、CPUが実行する制御プログラムを格納する記憶装置である。RAMは、例えば、CPUが制御プログラムを実行している間に用いる変数などのデータを格納する記憶装置である。CANコントローラはバス2に対し、データの送受信を行う装置である。
図1では説明の為、ECU3と接続するバス(車載ネットワーク)2は1本となっているが、一般的には、CANネットワークやLIN(Local Interconnect Network)など複数のネットワークがゲートウェイにより接続されている。
図2は、車載ネットワーク上のCANネットワークの通信を示す模式図である。図の縦軸にCANネットワーク上で送受信されるデータの項目及びCAN通信負荷102を示し、横軸に時間軸を示す。CANネットワーク上で送受信されるデータの項目として、故障診断ツール101からの送信データ及び、各ECUからの診断に関するデータの送信を示すECU1 130、ECU2 131、ECU3 132がある。また、ネットワーク負荷102は各ECUから車両制御に必要な車速やエンジン回転数などのデータ送信によるネットワーク負荷を示す。
図2では説明の為、ネットワーク負荷102に示すネットワーク負荷は一時的な高負荷状態が断続的に発生する表現としているが、実際には各ECUが送信する車両制御などに必要なデータは複数のIDにより行われている事に加え、ID毎に送信周期が異なる為、実際は不均一なネットワーク負荷となる。
CAN通信の特長の一つとして、データ内容や送信ノードを識別するためにID(識別子)が使用され、通信調停の優先順位の決定が行われる。図2で示すCANネットワークでは以下の優先順位となるIDとして説明する。
ECU2 131の要求191<ネットワーク負荷102で送信されているID群<故障診断ツール101の要求<ECU1 130の応答<ECU2 131の応答<ECU3 132の応答。
故障診断ツール101より、各ECUに向けて送信されるECU1要求151及び、ECU2要求152、ECU3要求153はそれぞれ順に、ECU1 130、ECU2 131、ECU3 132に対して、故障診断結果の周期応答を要求する送信データである。
故障診断ツール101は、ECU1 130に対し任意のタイミングで、ECU1要求151を送信する。この時、ECU1要求151はネットワーク負荷102で送信されているID群よりも優先順位が低い為、ネットワーク負荷104が途切れたタイミングでECU1要求151の送信が行われる。
ECU1 130は、故障診断ツール101より送信された、ECU1要求151を受信したタイミングで故障診断を行い、1回目の周期応答データである応答1 161の送信を行う。この時、ネットワーク負荷104は負荷が途切れた状態となっている為、ECU1 130は応答1 161を即座に送信することが出来る。
次に、故障診断ツール101はECU2 131に対し、周期的な故障診断を要求するECU2要求152の送信を行う。ECU1 130からの応答1 161の送信と同様に、ネットワーク負荷104が途切れた状態となっている為、故障診断ツール101からECU2への要求152も即座に送信される。
ECU2 131はECU2要求152を受信したタイミングで故障診断を行い、1回目の周期応答データの送信を行う。しかし、ECU1 130の2回目の応答である 応答2 162及びネットワーク負荷104、故障診断ツール101よりECU3 132に対し故障診断を行う要求であるECU3要求153の方がIDの優先順位が高い為、ECU2応答1 171は応答する事が出来ない。
ECU2は内部にECU2の送信完了時間を計測する送信判定タイマを持ち、要求152を受信したタイミングから送信が完了するまでの時間を計測する。
ECU2は故障診断ツール101に対し送信が完了せず、送信完了タイマの値が任意時間経過200した場合、他ECUに対してCAN送信の抑制を命令する要求191を送信する。
要求191を送信したECU2 131及び要求191を受信したECU1 130、ECU3 132は、車両制御に使用しているデータの内、運転手にギアのポジション情報を伝える為のデータなど、送信周期を伸ばしても影響の出ない情報の周期を伸ばす事によりCAN送信を抑制する。これにより、制御105の様にCANネットワークの負荷を下げる。
ECU2 131より送信された要求191によりネットワークの負荷が下がった為、各ECUの応答の内、優先度の高いECU1 130の応答3 163が故障診断ツール101に対し送信される。続いてIDの優先順位に従い、ECU2の応答1 171、ECU3の応答1 181の送信が行われる。
次に図3は、故障診断ツール101より送信される、故障診断結果の周期応答を要求する送信データを受信したECUのタスク動作を示す。
(S101)
最初に故障診断ツール101より要求を受信したか、または周期応答タイミングかの判定を行う。周期応答タイミングは故障診断ツール101より受信した要求が周期的な故障診断であった場合、初回応答以降の応答タイミングとなったかどうかを判定する。
故障診断ツール101より要求を受信していない、または、周期応答タイミングとなっていない場合(N)は、送信するデータが無いか既にデータ送信中である為、送信処理を行わず、(S104)の処理に進む。
最初に故障診断ツール101より要求を受信したか、または周期応答タイミングかの判定を行う。周期応答タイミングは故障診断ツール101より受信した要求が周期的な故障診断であった場合、初回応答以降の応答タイミングとなったかどうかを判定する。
故障診断ツール101より要求を受信していない、または、周期応答タイミングとなっていない場合(N)は、送信するデータが無いか既にデータ送信中である為、送信処理を行わず、(S104)の処理に進む。
(S102)
(S101)にて故障診断ツール101より要求を受信、または、周期応答タイミングとなった(Y)と判定された場合、図示しない処理にて生成した応答内容(故障診断結果)を故障診断ツール101に対し送信する。
(S101)にて故障診断ツール101より要求を受信、または、周期応答タイミングとなった(Y)と判定された場合、図示しない処理にて生成した応答内容(故障診断結果)を故障診断ツール101に対し送信する。
(S103)
(S102)の処理の次に、送信成功までの時間を計測するタイマである送信判定タイマに「0」をセットし、同時に送信を行った事を示す送信フラグをセットする。
(S102)の処理の次に、送信成功までの時間を計測するタイマである送信判定タイマに「0」をセットし、同時に送信を行った事を示す送信フラグをセットする。
(S104)
(S103)にて送信フラグがセットされている(Y)か否かを判定する(S104)。送信フラグがセットされていない場合(N)、送信要求がないと判断し、(S108)の処理に進む。
(S103)にて送信フラグがセットされている(Y)か否かを判定する(S104)。送信フラグがセットされていない場合(N)、送信要求がないと判断し、(S108)の処理に進む。
(S105)
(S104)にて送信フラグがセットされている(Y)と判定された場合、実際に送信が完了したか否かを判定する。
(S104)にて送信フラグがセットされている(Y)と判定された場合、実際に送信が完了したか否かを判定する。
(S106)
(S105)にて送信が完了している(Y)と判定した場合、前記送信判定タイマに「0」をセットする。
また、送信が完了(Y)している為、送信フラグをクリアし、次のデータ送信に備える。
(S105)にて送信が完了している(Y)と判定した場合、前記送信判定タイマに「0」をセットする。
また、送信が完了(Y)している為、送信フラグをクリアし、次のデータ送信に備える。
(S107)
(S105)にて送信が完了していない(Y)と判定した場合、送信判定タイマをインクリメントする。
(S105)にて送信が完了していない(Y)と判定した場合、送信判定タイマをインクリメントする。
(S108)
(S107)にてインクリメントされる送信判定タイマの値が任意時間を比較する。任意時間は、故障診断の規格により決められる故障診断ツール101の要求から各ECUが応答するまでの時間以内に設定される。送信判定タイマの値が任意時間を超えない場合は、ECUが応答するまでの時間に余裕が有る為、何もしない。
(S107)にてインクリメントされる送信判定タイマの値が任意時間を比較する。任意時間は、故障診断の規格により決められる故障診断ツール101の要求から各ECUが応答するまでの時間以内に設定される。送信判定タイマの値が任意時間を超えない場合は、ECUが応答するまでの時間に余裕が有る為、何もしない。
(S109)
(S108)にて送信判定タイマの値が任意時間を超えた場合(Y)、ネットワーク負荷が高くなっていると判断し、他ECUに対しギアのポジション情報を伝える為のデータなど、送信周期を伸ばしても車両制御に影響の出ない情報の送信周期を伸ばす要求を行う、送信抑制命令を送信する。
ネットワーク負荷を低下させる為、送信抑制命令を送信したECUも、前記送信周期を伸ばしても車両に影響の出ない情報の送信周期を伸ばす処理を行う。
(S108)にて送信判定タイマの値が任意時間を超えた場合(Y)、ネットワーク負荷が高くなっていると判断し、他ECUに対しギアのポジション情報を伝える為のデータなど、送信周期を伸ばしても車両制御に影響の出ない情報の送信周期を伸ばす要求を行う、送信抑制命令を送信する。
ネットワーク負荷を低下させる為、送信抑制命令を送信したECUも、前記送信周期を伸ばしても車両に影響の出ない情報の送信周期を伸ばす処理を行う。
次に図4は、図3の(S109)で送信された送信抑制命令を受信したECUのタスク動作を示す。
(S201)
各ECUは図3(S109)で送信された送信抑制命令の受信判定を行う。送信抑制命令を受信していない場合(N)、なにもせず通常の処理を続行する。
各ECUは図3(S109)で送信された送信抑制命令の受信判定を行う。送信抑制命令を受信していない場合(N)、なにもせず通常の処理を続行する。
(S202)
(S201)にて送信抑制命令を受信した場合(Y)、前記送信周期を伸ばしても車両に影響の出ない情報の送信周期を伸ばす制御用CANデータ抑制処理(S202)を行い、ネットワーク負荷を低下させる。
(S201)にて送信抑制命令を受信した場合(Y)、前記送信周期を伸ばしても車両に影響の出ない情報の送信周期を伸ばす制御用CANデータ抑制処理(S202)を行い、ネットワーク負荷を低下させる。
以上説明した実施例によれば、
車両を制御する複数の電子制御装置3と、
複数の電子制御装置3が接続される車載ネットワーク2と、
車載ネットワーク2を介して電子制御装置3から周期的に制御用データを送信する送信部と、
車両の故障診断を行う診断部5と、
周期的な送信要求を受信した電子制御装置3の故障診断の結果を周期的に応答する応答部と、
故障診断の結果の応答時に車載ネットワーク2の負荷が高い場合、他の電子制御装置3に対する送信の抑制命令をする命令部と、を備え、
抑制命令を送信した電子制御装置3、及び抑制命令を受信した他の電子制御装置3は、制御用データを送信する周期を長くする。
車両を制御する複数の電子制御装置3と、
複数の電子制御装置3が接続される車載ネットワーク2と、
車載ネットワーク2を介して電子制御装置3から周期的に制御用データを送信する送信部と、
車両の故障診断を行う診断部5と、
周期的な送信要求を受信した電子制御装置3の故障診断の結果を周期的に応答する応答部と、
故障診断の結果の応答時に車載ネットワーク2の負荷が高い場合、他の電子制御装置3に対する送信の抑制命令をする命令部と、を備え、
抑制命令を送信した電子制御装置3、及び抑制命令を受信した他の電子制御装置3は、制御用データを送信する周期を長くする。
また、車両の動作を制御する際に利用される車載ネットワークにおいて、
この車両を制御する為の複数のECUと、
複数のECUの通信の為に接続されるバスと、
車両外部より車両の故障診断を行う為の故障診断ツールと、
車載ネットワークと故障診断ツールを接続する為の診断コネクタとを備え、
車載ネットワークはCAN(Controller Area Network)通信プロトコルのISO(International Organization for Standardization)11898−1の規定により、データ内容や送信ノードを識別するためのID(識別子)を有し、前記IDが小さい方が優先的に送信を行える通信調停と、
車載ネットワークを利用し複数のECUにて車両制御する為に、複数のECUより周期的に送信される制御用データと、
故障診断ツールより任意のバスに接続される任意のECUに対し、故障診断結果の周期送信を要求する命令と、
故障診断結果の周期送信要求を受信した任意のECUは故障診断を行い、その結果を周期応答する。
ECUの故障診断結果の周期応答時に、CAN通信の負荷が高い場合、他ECUに対しCAN送信の抑制を命令することと、
CAN送信の抑制命令を送信したECU及び抑制命令を受信した他ECUは制御用データの周期送信時間を長くすることにより、CAN通信の負荷を軽減する。
この車両を制御する為の複数のECUと、
複数のECUの通信の為に接続されるバスと、
車両外部より車両の故障診断を行う為の故障診断ツールと、
車載ネットワークと故障診断ツールを接続する為の診断コネクタとを備え、
車載ネットワークはCAN(Controller Area Network)通信プロトコルのISO(International Organization for Standardization)11898−1の規定により、データ内容や送信ノードを識別するためのID(識別子)を有し、前記IDが小さい方が優先的に送信を行える通信調停と、
車載ネットワークを利用し複数のECUにて車両制御する為に、複数のECUより周期的に送信される制御用データと、
故障診断ツールより任意のバスに接続される任意のECUに対し、故障診断結果の周期送信を要求する命令と、
故障診断結果の周期送信要求を受信した任意のECUは故障診断を行い、その結果を周期応答する。
ECUの故障診断結果の周期応答時に、CAN通信の負荷が高い場合、他ECUに対しCAN送信の抑制を命令することと、
CAN送信の抑制命令を送信したECU及び抑制命令を受信した他ECUは制御用データの周期送信時間を長くすることにより、CAN通信の負荷を軽減する。
すなわち、ネットワークが高負荷の状態で、故障診断ツールからの要求メッセージが送信され、車載用ECUが応答出来なくなった場合、車載用ECUは他の車載用ECUが送信しているIDよりも優先順位の高い任意のIDにて他の車載用ECUに対しCAN送信を抑制するメッセージを送信する。
他の車載用ECUはメッセージを受信後、車両制御に使用しているデータの内、運転手にギアのポジションを伝える為のデータなど、送信周期を伸ばしても影響の出ないデータの送信周期を伸ばすことにより、ネットワークの負荷を低下させることができる。
1 …車両
2 …バス(車載ネットワーク)
3 …ECU(電子制御装置)
4 …診断コネクタ
5 …故障診断ツール(診断部)
2 …バス(車載ネットワーク)
3 …ECU(電子制御装置)
4 …診断コネクタ
5 …故障診断ツール(診断部)
Claims (3)
- 車両を制御する複数の電子制御装置と、
複数の前記電子制御装置が接続される車載ネットワークと、
前記車載ネットワークを介して前記電子制御装置から周期的に制御用データを送信する送信部と、
前記車両の故障診断を行う診断部と、
周期的な送信要求を受信した前記電子制御装置の前記故障診断の結果を周期的に応答する応答部と、
前記故障診断の結果の前記応答時に前記車載ネットワークの負荷が高い場合、前記他の電子制御装置に対する送信の抑制命令をする命令部と、を備え、
前記抑制命令を送信した前記電子制御装置、及び前記抑制命令を受信した前記他の電子制御装置は、制御用データを送信する周期を長くする
車両システム。 - 請求項1に記載の車両システムにおいて、
優先度を識別するIDに基づいて、前記制御用データよりも前記優先度の高い前記抑制命令を送信する
車両システム。 - 請求項1に記載の車両システムにおいて、
前記送信要求の受信から前記応答部の前記応答が完了するまでの時間を計測するタイマを有し、
前記タイマの値が所定時間経過した場合、前記車載ネットワークの負荷が高いと判断する
車両システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018143091A JP2020022019A (ja) | 2018-07-31 | 2018-07-31 | 車両システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018143091A JP2020022019A (ja) | 2018-07-31 | 2018-07-31 | 車両システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020022019A true JP2020022019A (ja) | 2020-02-06 |
Family
ID=69589962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018143091A Pending JP2020022019A (ja) | 2018-07-31 | 2018-07-31 | 車両システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020022019A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111736873A (zh) * | 2020-06-22 | 2020-10-02 | 中国第一汽车股份有限公司 | 电子控制单元的程序更新方法、装置、设备和存储介质 |
| CN114079592A (zh) * | 2020-08-18 | 2022-02-22 | 株式会社电装 | 负载驱动系统 |
| CN114584488A (zh) * | 2020-11-30 | 2022-06-03 | 丰田自动车株式会社 | 通信装置、车辆、系统、以及判定方法 |
| WO2024142338A1 (ja) * | 2022-12-27 | 2024-07-04 | 日産自動車株式会社 | データ転送方法及び車載中継装置 |
-
2018
- 2018-07-31 JP JP2018143091A patent/JP2020022019A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111736873A (zh) * | 2020-06-22 | 2020-10-02 | 中国第一汽车股份有限公司 | 电子控制单元的程序更新方法、装置、设备和存储介质 |
| CN111736873B (zh) * | 2020-06-22 | 2023-02-24 | 中国第一汽车股份有限公司 | 电子控制单元的程序更新方法、装置、设备和存储介质 |
| CN114079592A (zh) * | 2020-08-18 | 2022-02-22 | 株式会社电装 | 负载驱动系统 |
| CN114584488A (zh) * | 2020-11-30 | 2022-06-03 | 丰田自动车株式会社 | 通信装置、车辆、系统、以及判定方法 |
| US11961338B2 (en) | 2020-11-30 | 2024-04-16 | Toyota Jidosha Kabushiki Kaisha | Communication apparatus, vehicle, system, and determination method |
| CN114584488B (zh) * | 2020-11-30 | 2024-04-19 | 丰田自动车株式会社 | 通信装置、车辆、系统、以及判定方法 |
| WO2024142338A1 (ja) * | 2022-12-27 | 2024-07-04 | 日産自動車株式会社 | データ転送方法及び車載中継装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5709055B2 (ja) | 車両用電子制御装置 | |
| US9819562B2 (en) | Gateway device with priority arbitration function | |
| KR101851092B1 (ko) | 통신 장치, 통신 방법 및 통신 시스템 | |
| US10284387B2 (en) | Hybrid intra-vehicle communication network | |
| WO2018096755A1 (ja) | 並行処理装置及び並行処理プログラム | |
| CN115336233B (zh) | 车载中继装置、信息处理方法及程序 | |
| JP2018092577A (ja) | 並行処理装置及び並行処理プログラム | |
| JP7133022B2 (ja) | 車載通信装置及び車載システム | |
| WO2014057643A1 (ja) | 中継装置 | |
| JP2020022019A (ja) | 車両システム | |
| WO2015122166A1 (ja) | 車載制御装置 | |
| JP5050653B2 (ja) | 電子制御装置 | |
| JP5637193B2 (ja) | 通信システム | |
| WO2014045354A1 (ja) | 通信装置及び通信方法 | |
| CN111176251A (zh) | 网络系统 | |
| JP2012239143A (ja) | 電子制御ユニット、車載ネットワーク、データ送信方法 | |
| JP2006191338A (ja) | バス内のデバイスの故障診断を行うゲートウエイ装置 | |
| JP5165957B2 (ja) | 車載通信システム | |
| JP2019097088A (ja) | シリアル通信システム | |
| JP6493381B2 (ja) | 車載通信システム | |
| WO2014007067A1 (ja) | 通信システム、中継装置及び通信装置 | |
| JP2006191337A (ja) | バス間のメッセージ転送を行うゲートウエイ装置及びそれを使用したネットワークシステム | |
| JP7151930B2 (ja) | 中継装置、通信ネットワークシステム及び通信制御方法 | |
| JP7140011B2 (ja) | ゲートウェイ装置 | |
| JP2020100202A (ja) | 故障診断システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180801 |