JP2020041275A - 柱部材切断装置 - Google Patents
柱部材切断装置 Download PDFInfo
- Publication number
- JP2020041275A JP2020041275A JP2018167316A JP2018167316A JP2020041275A JP 2020041275 A JP2020041275 A JP 2020041275A JP 2018167316 A JP2018167316 A JP 2018167316A JP 2018167316 A JP2018167316 A JP 2018167316A JP 2020041275 A JP2020041275 A JP 2020041275A
- Authority
- JP
- Japan
- Prior art keywords
- circular saw
- turning
- cutting
- column member
- center line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




























Landscapes
- Working Measures On Existing Buildindgs (AREA)
- Drilling And Boring (AREA)
- Sawing (AREA)
Abstract
Description
この構成によれば、第1旋回軸の周りで第1丸鋸回転機構を旋回させる簡易な機構によって、第1回転軸と旋回中心線との距離を変化させることか可能になり、また、第2旋回軸の周りで第2丸鋸回転機構を旋回させる簡易な機構によって、第2回転軸と旋回中心線との距離を変化させることか可能になる。
この場合、上記柱部材切断装置は、把持部に固定されたフレームを有してよい。丸鋸旋回機構は、フレームに支持され、旋回ベースの旋回時に回転駆動される歯車と、旋回ベースの馬蹄形状の外縁に設けられ、歯車と噛み合うラックとを含んでよい。
この構成によれば、第1丸鋸による周方向の切断線と第2丸鋸による周方向の切断線とが柱部材の長手方向において概ね一致するように、第1丸鋸の切断位置と第2丸鋸の切断位置との相対的な位置関係を調節することが可能になる。そのため、柱部材を周方向の全周に渡って切断する場合に、第1丸鋸による切断線と第2丸鋸による切断線とが長手方向においてずれていることに起因する切断不良を回避し易くなる。
この構成によれば、第1移動機構及び第2移動機構の少なくとも一方を持つことによって、第1丸鋸の切断位置と第2丸鋸の切断位置との相対的な位置関係を調節することが可能になる。
この構成によれば、第1移動機構において、第1丸鋸回転機構を第1旋回軸に沿って移動させる簡易な構造により、第1丸鋸の切断位置と第2丸鋸の切断位置との相対的な位置関係を調節することが可能になる。また、第2移動機構において、第2丸鋸回転機構を第2旋回軸に沿って移動させる簡易な構造により、第1丸鋸の切断位置と第2丸鋸の切断位置との相対的な位置関係を調節することが可能になる。
この構成によれば、2つの把持部の把持位置に挟まれた中間の位置で柱部材が切断されることにより、柱部材の切断の前後において、柱部材に対する上記柱部材切断装置の位置が安定し易くなる。また、柱部材の切断後は、一方の把持部による把持を解除するとともに、他方の把持部による把持を維持することによって、柱部材の切断部分を他方の把持部に把持させたまま吊り降ろすことが可能になる。
この構成によれば、第1丸鋸及び第2丸鋸により切断された柱部材の切断部分を把持部により把持した状態でクレーン等により吊り降ろす際に、当該切断部分が脱落し難くなる。
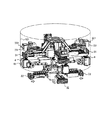
図3A〜図3Cは、筒身10及び主柱13の除却に用いられる解体装置2Bの一例を示す図である。図3Aは解体装置2Bを上方から見た斜視図であり、図3Bは解体装置2Bを上方から見た平面図であり、図3Cは解体装置2Bを横方向から見た側面図である。
図4A〜図4Cは、筒身10及び斜材14の除却に用いられる解体装置2Cの一例を示す図である。図4Aは解体装置2Cの斜視図であり、図4Bは解体装置2Cを上方から見た平面図であり、図4Cは解体装置2Cを横方向から見た側面図である。
ここで、解体装置2A〜2Cの構成をそれぞれ説明する。
図2A〜図2Cに示す解体装置2Aは、筒身10の内面を押圧することにより筒身10に固定される固定部3と、固定部3に対して旋回可能な切削具を持つ筒身切断部4と、筒身10の外側の付帯物(梯子15、背かご16、電線管17等)を把持して切断する外側構造物切断部6Aと、筒身10の外側に位置し、固定部3に対して旋回可能であり、外側構造物切断部6Aが固定された旋回台5Aとを有する。筒身切断部4及び旋回台5Aは、それぞれ固定部3に対して旋回可能に組み合わされている。また、筒身切断部4及び旋回台5Aは、旋回軸RXの周りでそれぞれ旋回するように駆動される。旋回軸RXは、固定部3を筒身10に固定させた状態において、後述する図18Bに示すように、筒身10の長手方向に垂直な断面の中心を通る中心線に沿った状態となる。筒身切断部4は、この旋回軸RXの周りで切削具を旋回させることにより、筒身10の内面を周方向(筒身10の長手方向に垂直な断面に沿う方向)に切断する。
図3A〜図3Cに示す解体装置2Bは、筒身10の内面を押圧することにより筒身10に固定される固定部3と、固定部3に対して旋回可能な切削具を持つ筒身切断部4と、鉄塔12の主柱13を把持して切断する外側構造物切断部6Bと、筒身10の外側に位置し、固定部3に対して旋回可能であり、外側構造物切断部6Bが吊り下げられた旋回台5Bとを有する。図2A〜図2Bと図3A〜図3Cとにおける同一符号は、同一の構成要素を表す。すなわち、固定部3及び筒身切断部4は、既に説明した解体装置2Aと同じである。ここでは、解体装置2Aと異なる構成要素を中心に説明する。
同様に、第2丸鋸移動機構740−2は、第2丸鋸710−2の第2回転軸731−2を旋回中心線RLに対して平行に保ちつつ、第2回転軸731−2と旋回中心線RLとの距離を変化させる。具体的には、第2丸鋸移動機構740−2は、第2回転軸731−2と平行かつ第2回転軸731−2から離れた第2旋回軸741−2の周りで第2丸鋸回転機構730−2を旋回させ、これにより第2回転軸731−2と旋回中心線RLとの距離を変化させる。
図4A〜図4Cに示す解体装置2Cは、筒身10の内面を押圧することにより筒身10に固定される固定部3と、固定部3に対して旋回可能な切削具を持つ筒身切断部4と、鉄塔12の斜材14を把持して切断する外側構造物切断部6Cと、筒身10の外側に位置し、固定部3に対して旋回可能であり、外側構造物切断部6Bが吊り下げられた旋回台5Bとを有する。図3A〜図3Bと図4A〜図4Cとにおける同一符号は、同一の構成要素を表す。すなわち、解体装置2Cは、解体装置2Bにおける外側構造物切断部6Bを外側構造物切断部6Cに置き換えたものであり、他の構成は解体装置2Cと同じである。従ってここでは、外側構造物切断部6Cを中心に説明する。
ここで、上述した解体装置2Aを用いて筒身10及び付帯物(梯子15、背かご16、電線管17等)を筒状構造物1から除却する手順について説明する。
電線管17を切断した場合、切断した箇所から電線管17が垂れ下がり、除却の妨げになる可能性がある。そこで、図20Bに示すようなクランプ器具601を用いて、把持用ロボットアーム61により、切断した電線管17を梯子15等に固定する。ホルダ602には、ゼンマイ式に巻き取られるように構成されたワイヤーロープ603が装備されており、このようなワイヤーロープ603によって複数のクランプ器具601がつながれている。ホルダ602につながれた複数のクランプ器具601のうち、1つのクランプ器具601を梯子15等に取り付け、他のクランプ器具601を切断した電線管17に取り付ける。これにより、クランプ器具601を取り付けられた電線管17がそれぞれ梯子15等にワイヤーロープ603でつながれた状態となり、電線管17が垂れ下がって除却の妨げになる状態を回避できる。
図21Dに示すように、4つの丸鋸41を旋回させながら内面101の周方向の切断を進めた場合、4つの丸鋸41による4つの切断線が生じる。周方向において隣接する2つの丸鋸41の位置は、図9Cや図21Cに示すように長手方向において互いずれているため、周方向に隣接する2つの切断線は、長手方向において互いにずれる。そこで、4つの切断線の両端が、それぞれ他の切断線の端部と周方向において重なるまで(4つの丸鋸41の旋回角度が概ね45°を超えるまで)、4つの丸鋸41により内面101の切断を進め、その後、図22A及び図22Bに示すように、4つの丸鋸41を内面101から離す。そして、4つの丸鋸41による切断方向を、周方向から長手方向に切り替える。
次に、上述した解体装置2Cを用いて筒身10及び斜材14を筒状構造物1から除却する手順について説明する。
次に、上述した解体装置2Bを用いて筒身10及び主柱13を筒状構造物1から除却する手順について説明する。
本実施形態によれば、図12A〜図12B及び図13A〜図13Bに示すように、第1丸鋸710−1の第1回転軸731−1を旋回中心線RLに対して平行に保ちつつ、第1回転軸731−1と旋回中心線RLとの距離を変化させることか可能であり、また、第2丸鋸710−2の第2回転軸731−2を旋回中心線RLに対して平行に保ちつつ、第2回転軸731−2と旋回中心線RLとの距離を変化させることか可能である。そのため、第1回転軸731−1と旋回中心線RLとの距離及び第2回転軸731−2と旋回中心線RLとの距離をそれぞれ広げることによって、比較的径の大きい柱部材であっても、把持部71により把持される位置へ柱部材を導入し易くなる。また、第1丸鋸710−1及び第2丸鋸710−2のそれぞれにおいて、柱部材に対する切断の深さを調節することが可能になる。
この構成によれば、第1旋回軸の周りで第1丸鋸回転機構を旋回させる簡易な機構によって、第1回転軸と旋回中心線との距離を変化させることか可能になり、また、第2旋回軸の周りで第2丸鋸回転機構を旋回させる簡易な機構によって、第2回転軸と旋回中心線との距離を変化させることか可能になる。
Claims (9)
- 筒状の柱部材を切断する柱部材切断装置であって、
前記柱部材の長手方向に垂直な断面の中心を通る中心線が所定の旋回中心線に沿った状態で前記柱部材を把持する把持部と、
前記把持部により把持された前記柱部材の外面を周方向に切断する第1丸鋸及び第2丸鋸と、
前記第1丸鋸による切断位置及び前記第2丸鋸による切断位置がそれぞれ前記外面を前記周方向へ移動するように、前記第1丸鋸及び前記第2丸鋸を前記旋回中心線の周りで旋回させる丸鋸旋回機構とを有し、
前記丸鋸旋回機構は、
前記旋回中心線の周りで旋回する旋回ベースと、
前記旋回ベースに設けられ、前記第1丸鋸を回転させる第1丸鋸回転機構と、
前記旋回ベースに設けられ、前記第2丸鋸を回転させる第2丸鋸回転機構と、
前記第1丸鋸回転機構による前記第1丸鋸の第1回転軸を前記旋回中心線に対して平行に保ちつつ、前記第1回転軸と前記旋回中心線との距離を変化させる第1丸鋸移動機構と、
前記第2丸鋸回転機構による前記第2丸鋸の第2回転軸を前記旋回中心線に対して平行に保ちつつ、前記第2回転軸と前記旋回中心線との距離を変化させる第2丸鋸移動機構とを含む、
柱部材切断装置。 - 前記第1丸鋸移動機構は、前記第1回転軸と平行であり、前記第1回転軸から離れた第1旋回軸の周りで前記第1丸鋸回転機構を旋回させ、
前記第2丸鋸移動機構は、前記第2回転軸と平行であり、前記第2回転軸から離れた第2旋回軸の周りで前記第2丸鋸回転機構を旋回させる、
請求項1に記載の柱部材切断装置。 - 前記旋回ベースは、前記旋回中心線に平行な方向から見て馬蹄形状を持ち、
前記第1旋回軸は、前記馬蹄形状の一方の端部において前記旋回ベースに回転自在に支持され、
前記第2旋回軸は、前記馬蹄形状の他方の端部において前記旋回ベースに回転自在に支持される、
請求項2に記載の柱部材切断装置。 - 前記把持部に固定されたフレームを有し、
前記丸鋸旋回機構は、
前記フレームに支持され、前記旋回ベースの旋回時に回転駆動される歯車と、
前記旋回ベースの前記馬蹄形状の外縁に設けられ、前記歯車と噛み合うラックとを含む、
請求項3に記載の柱部材切断装置。 - 前記丸鋸旋回機構は、前記旋回中心線に平行な方向における前記第1丸鋸の切断位置と前記第2丸鋸の切断位置との相対的な位置関係を調節する切断位置調節機構を含む、
請求項1〜4の何れか一項に記載の柱部材切断装置。 - 前記切断位置調節機構は、
前記旋回ベースに対して第1丸鋸回転機構を前記旋回中心線と平行な方向に移動させる第1移動機構、
及び、
前記旋回ベースに対して第2丸鋸回転機構を前記旋回中心線と平行な方向に移動させる第2移動機構
の少なくとも一方を含む、
請求項5に記載の柱部材切断装置。 - 前記第1丸鋸移動機構は、前記第1回転軸と平行であり、前記第1回転軸から離れた第1旋回軸の周りで前記第1丸鋸回転機構を旋回させ、
前記第2丸鋸移動機構は、前記第2回転軸と平行であり、前記第2回転軸から離れた第2旋回軸の周りで前記第2丸鋸回転機構を旋回させ、
前記切断位置調節機構は、
前記第1丸鋸回転機構を前記第1旋回軸に沿って移動させる前記第1移動機構、
及び、
前記第2丸鋸回転機構を前記第2旋回軸に沿って移動させる前記第2移動機構
の少なくとも一方を含む、
請求項6に記載の柱部材切断装置。 - 前記長手方向の異なる位置で前記柱部材を把持し、互いに固定された2つの前記把持部を有し、
前記第1丸鋸及び前記第2丸鋸は、前記2つの把持部による2つの把持位置に挟まれた中間の位置で前記柱部材の外面を周方向に切断する、
請求項1〜7の何れか一項に記載の柱部材切断装置。 - 前記柱部材の外面に孔をあけて当該孔に嵌まり込むドリル刃を備えた少なくとも1つのドリル部を有する、
請求項1〜8の何れか一項に記載の柱部材切断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167316A JP6496449B1 (ja) | 2018-09-06 | 2018-09-06 | 柱部材切断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018167316A JP6496449B1 (ja) | 2018-09-06 | 2018-09-06 | 柱部材切断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6496449B1 JP6496449B1 (ja) | 2019-04-03 |
| JP2020041275A true JP2020041275A (ja) | 2020-03-19 |
Family
ID=65999133
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018167316A Active JP6496449B1 (ja) | 2018-09-06 | 2018-09-06 | 柱部材切断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6496449B1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7553253B2 (ja) * | 2020-03-13 | 2024-09-18 | 株式会社日立プラントコンストラクション | 排気筒解体方法 |
| JP7742218B2 (ja) * | 2020-04-08 | 2025-09-19 | 株式会社竹中工務店 | 排気用塔状構造物の施工方法、及び排気用塔状構造物 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6227926B2 (ja) * | 1982-09-29 | 1987-06-17 | Sumitomo Heavy Industries | |
| JPH03290566A (ja) * | 1990-04-09 | 1991-12-20 | Taisei Corp | 解体装置 |
| JPH05195636A (ja) * | 1992-01-17 | 1993-08-03 | Hazama Gumi Ltd | 煙突の解体装置と解体方法 |
| JPH0617543A (ja) * | 1992-07-03 | 1994-01-25 | Hazama Gumi Ltd | 煙突の解体装置と解体方法 |
| JPH07185931A (ja) * | 1993-12-25 | 1995-07-25 | Sumitomo Heavy Ind Ltd | 4刃式鋼管切断機 |
| JP2005068758A (ja) * | 2003-08-22 | 2005-03-17 | Fujita Corp | 煙突洗浄解体装置 |
-
2018
- 2018-09-06 JP JP2018167316A patent/JP6496449B1/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6227926B2 (ja) * | 1982-09-29 | 1987-06-17 | Sumitomo Heavy Industries | |
| JPH03290566A (ja) * | 1990-04-09 | 1991-12-20 | Taisei Corp | 解体装置 |
| JPH05195636A (ja) * | 1992-01-17 | 1993-08-03 | Hazama Gumi Ltd | 煙突の解体装置と解体方法 |
| JPH0617543A (ja) * | 1992-07-03 | 1994-01-25 | Hazama Gumi Ltd | 煙突の解体装置と解体方法 |
| JPH07185931A (ja) * | 1993-12-25 | 1995-07-25 | Sumitomo Heavy Ind Ltd | 4刃式鋼管切断機 |
| JP2005068758A (ja) * | 2003-08-22 | 2005-03-17 | Fujita Corp | 煙突洗浄解体装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6496449B1 (ja) | 2019-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101881392B1 (ko) | 플랜지관 용접용 지그장치 및 이를 이용한 플랜지관 제조방법 | |
| US10661397B2 (en) | Position adjustable grapple attachment | |
| AU2012258600B2 (en) | An attachment for making up or breaking out pipe | |
| CN101391354B (zh) | 悬挂式接管焊接机器人 | |
| EP4141214B1 (en) | End effector for gripping and spinning pipes | |
| JP5387611B2 (ja) | 駆動機構およびロボット | |
| EP1731259A1 (en) | Workpiece positioner for arc welding and arc welding robot system having the positioner | |
| US20180370049A1 (en) | Robot arm mechanism | |
| KR20180049033A (ko) | 회전 가능하게 커플링된 용접 모듈을 갖는 파이프 크롤링 용접 장치, 그러한 파이프 크롤링 장치로 파이프들을 용접하는 방법 | |
| KR20090091259A (ko) | 토치회전형 용접장치 | |
| JP6496449B1 (ja) | 柱部材切断装置 | |
| JP2016190297A (ja) | ロボットシステム | |
| WO2019049994A1 (ja) | 作業装置 | |
| DE102011105616A1 (de) | Hybridroboter auf der Basis von drei Linearaktoren deren Achsen sich schneiden, eines Parellelitätshalters, eines multifunktionalen Raumgelenkes, eines Mehrachsenraumgelenkes und einer Raumorientierungseinheit | |
| US20210299851A1 (en) | Tool robot for use in construction | |
| KR101141133B1 (ko) | 러그 취부장치 | |
| JP2020041273A (ja) | 筒状構造物解体装置及び筒状構造物解体方法 | |
| JP6457143B1 (ja) | 筒状構造物解体装置及び筒状構造物解体方法 | |
| JP2018069354A (ja) | リンク式多関節ロボット | |
| JP2021109253A (ja) | 作業アーム | |
| WO2022064372A1 (en) | Innovative multifunction manipulator for manipulating drilling elements in a drilling rig and related drilling rig. | |
| JP6657868B2 (ja) | ロボットシステム | |
| JP7520359B2 (ja) | ロッドハンドリング装置 | |
| JP5348298B2 (ja) | ロボット | |
| WO2018081874A1 (en) | A system and method for joining panels |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180913 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180913 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6496449 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |