JP2020042027A - 機械式作動システム - Google Patents
機械式作動システム Download PDFInfo
- Publication number
- JP2020042027A JP2020042027A JP2019157702A JP2019157702A JP2020042027A JP 2020042027 A JP2020042027 A JP 2020042027A JP 2019157702 A JP2019157702 A JP 2019157702A JP 2019157702 A JP2019157702 A JP 2019157702A JP 2020042027 A JP2020042027 A JP 2020042027A
- Authority
- JP
- Japan
- Prior art keywords
- mechanical
- cam
- cam surface
- actuation system
- engaged position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
- B64C13/26—Transmitting means without power amplification or where power amplification is irrelevant
- B64C13/28—Transmitting means without power amplification or where power amplification is irrelevant mechanical
- B64C13/32—Transmitting means without power amplification or where power amplification is irrelevant mechanical using cam mechanisms
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D9/00—Level control, e.g. controlling quantity of material stored in vessel
- G05D9/04—Level control, e.g. controlling quantity of material stored in vessel with auxiliary non-electric power
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B1/00—Installations or systems with accumulators; Supply reservoir or sump assemblies
- F15B1/26—Supply reservoir or sump assemblies
- F15B1/265—Supply reservoir or sump assemblies with pressurised main reservoir
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16K—VALVES; TAPS; COCKS; ACTUATING-FLOATS; DEVICES FOR VENTING OR AERATING
- F16K31/00—Actuating devices; Operating means; Releasing devices
- F16K31/44—Mechanical actuating means
- F16K31/52—Mechanical actuating means with crank, eccentric, or cam
- F16K31/524—Mechanical actuating means with crank, eccentric, or cam with a cam
- F16K31/52408—Mechanical actuating means with crank, eccentric, or cam with a cam comprising a lift valve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/60—Testing or inspecting aircraft components or systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/0007—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm for discrete indicating and measuring
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- General Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Control Devices (AREA)
- Transmission Devices (AREA)
- Measurement Of Levels Of Liquids Or Fluent Solid Materials (AREA)
Abstract
【課題】デバイスの流体レベルを維持するための機械式作動システムを提供すること。【解決手段】機械式作動システムは、外部デバイスに機械式に連結可能でありかつ制御可能である第1の機械式デバイスを含み、第1の機械式デバイスの回転配向は、外部デバイスによって制御可能であり、回転配向は、外部デバイスのパラメータを示す。第1の機械式デバイスおよび第2の機械式デバイスは、外部デバイスのパラメータが限界値に達するのを防止するための弁を制御するための相互作用する面を有する。オペレータ作動デバイスは、第1の機械式デバイスの面と相互作用して、システムによって自動的にリセット可能である単一のオペレータ入力を可能にする。【選択図】図2
Description
本発明は、機械式作動システムに向けられ、より詳細には、デバイスの流体レベルを維持するための機械式作動システムに向けられている。
[0001]流体システムは、デバイスの構成要素を制御するために広く使用されている。例えば、航空機は、流体システムを利用して飛行制御面を制御する。保守が実行されている間、作業者は、作動液を補充するなどの理由や他の理由から、通常の運転の設定をオーバライドする必要がある場合がある。多くの場合、設定は、保守の完了時に手動でリセットされねばならない。航空機を保守の完了時に通常の運転の設定に戻せないと、不適切な航空機の運転を招くことがある。
[0002]必要とされるものは、それらの欠点に苦しまない機械式システムである。
[0003]本発明は、外部デバイスに機械式に連結可能である回転可能な第1の機械式デバイスを含む機械式作動システムに関し、第1の機械式デバイスの回転配向は、外部デバイスによって制御可能であり、回転配向は、外部デバイスのパラメータを示す。機械式作動システムは、第1の機械式デバイスの第1のカム面によって係合解除位置に摺動可能に支持される枢動可能な第2の機械式デバイスを更に含む。機械式作動システムは、所定の限界閾値に達するパラメータに応答して、所定の回転配向まで回転運動に促される第1の機械式デバイスの少なくとも一部分と、パラメータが限界値に達するのを防止するための弁を開くために、係合解除位置から係合位置まで促される第2の機械式デバイスとを更に含む。機械式作動システムは、第1の機械式デバイスの第2のカム面に接触する係合位置のオペレータ作動デバイスを更に含む。機械式作動システムは、係合位置から係合解除位置まで手動で作動されるオペレータ作動デバイスに応答して、回転運動に促されて、第2の機械式デバイスを係合位置から係合解除位置に向けて促す第2のカム面と、システムによって係合位置に自動的に復帰可能であるオペレータ作動デバイスとを更に含む。
[0004]本発明は、更に、細長部材を受容するためのプーリを含む回転可能な第1の機械式デバイスを含む機械式作動システムに関し、細長部材がプーリおよび外部デバイス間に延び、プーリの回転配向が外部デバイスによって制御可能であり、回転配向が外部デバイスのパラメータを示す。機械式作動システムは、第1のカム面を有する第1のカムと、第2のカム面および第3のカム面を有する第2のカムと、第1のカム面によって係合解除位置に摺動可能に支持される枢動可能な第2の機械式デバイスと、を更に含む。機械式作動システムは、所定の限界閾値に達するパラメータに応答して、所定の回転配向まで回転運動に促されるプーリおよび第1のカムと、パラメータが限界値に達するのを防止するための弁を開くために、係合解除位置から係合位置まで促される第2の機械式デバイスとを更に含む。機械式作動システムは、第2のカム面に接触する係合位置のオペレータ作動デバイスを更に含む。機械式作動システムは、係合位置から係合解除位置まで手動で作動されるオペレータ作動デバイスに応答して、回転運動に促される第2のカム面と、第2の機械式デバイスを係合位置から係合解除位置に向けて促す第3のカム面とを更に含む。機械式作動システムは、システムによって係合位置に自動的に復帰可能であるオペレータ作動デバイスを更に含む。
[0005]本発明の他の特徴および利点については、本発明の原理を例として例証する添付の図面と関連して解釈される次の好適実施形態のより詳細な説明から明らかになるであろう。
[0025]可能な限り、同じ参照番号は、図面全体に亘って使用され、同一または同様の部品を指すことになろう。
[0026]提供されるのは、機械式作動システムの実施形態であり、コンテナ内の最小限の流体を自動的に固定して、次いで、保守オペレータなどのオペレータからの単一の行動または入力だけによって、流体をタンクに補充するのを可能にする。
[0026]提供されるのは、機械式作動システムの実施形態であり、コンテナ内の最小限の流体を自動的に固定して、次いで、保守オペレータなどのオペレータからの単一の行動または入力だけによって、流体をタンクに補充するのを可能にする。
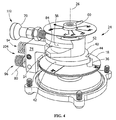
[0027]図1は、外部デバイス12に機械式に連結される機械式作動システム10を示す。より具体的には、機械式作動システム10のプーリ18は、プーリ18と、外部デバイス12のタンク14に関係するプランジャ16と、の間に延びる細長部材20を受容する。換言すると、タンク14の流体レベルは、プランジャ16の位置に直接対応するが、同じようにプーリ18の角度配向に直接対応する。別の言い方をすると、プーリ18の回転配向は、外部デバイス12のタンク14の流体レベルを示す。
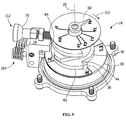
[0028]図2は、機械式作動システム10の断面図を示し、図3は、機械式作動システム10の分解図である。図2および3にまとめて示すように、機械式デバイス24は、ハウジング22およびハウジング部分66の内側の軸26のまわりを回転する。機械式デバイス24は、軸26に沿って1つの方向にシャフト部分28まで延びるプーリ18を含み、機械式デバイス24は、プーリ18からシャフト部分30まで軸26に沿って反対方向に更に延びる。示すように、プーリ18およびシャフト部分28、30は、単一即ち一部片の構造である。シャフト部分28は、ハウジング22に固定された軸受32によって回転可能に支持されている。シャフト部分30は、ハウジング部分66に形成された開口67を通って延び、また、それによって回転可能に案内されている。ポインタまたはインジケータ60は、プーリ18とは反対側のシャフト部分30の端部に締結体62によって固定される。トルク付勢部材34は、一端がプーリ18に、他端がハウジング22に連結され、それはタンク14(図1)の流体レベルの変動に応じて細長部材20(図1)の張力を維持するためである。機械式デバイス24は、シャフト部分30に固定された軸受38によって軸26のまわりを回転可能に支持されるカム40を更に含む。カム40は、1対の肩部44(1つの肩部44だけが図2および3の個々に示される)を含むカム面42を有する。ピンなどの突出体36は、プーリ18に固定されて、カム40に面したプーリ18の表面から軸26に概ね平行な方向に延びており、プーリ18およびカム40間の軸26のまわりの十分な相対回転運動の結果として、カム40の1対の肩部44の各肩部44と係合するためにサイズ決めおよび位置決めされる。1つの実施形態では、突出体36は、プーリ18と共に単一即ち一部片の構造である。トルク付勢部材46は、一端がカム40に連結され、他端がプーリ18に連結され、それによって、カム40およびプーリ18を機械式に連結する。
[0029]図2および3に更に示すように、機械式デバイス24は、シャフト部分30に固定された軸受50によって軸26のまわりに回転可能に支持されたカム52を更に含む。カム52は、カム面54、56を有する。トルク付勢部材58は、一端がカム52に、他端が、締結体68(1つの締結体68だけが図2に示される)によってハウジング22に固定されるハウジング部分66に連結される。カム52に面した表面から軸26に概ね平行な方向に延びる突出体48は、カム52のカム面54の肩部122(図18)と係合するためにサイズ決めおよび位置決めされる。オペレータ作動デバイス70は、ハウジング部分66の中に固定されており、格納式先端72を含む。本明細書での目的のために、先端72がオペレータ作動デバイス70の本体を越えて延びるとき、オペレータ作動デバイス70は、カム52のカム面56に関係する肩部114(図19)に係合するための係合位置112(図19)にあり、先端72が、保守作業者などによってオペレータ作動デバイス70の本体の内側に手動で格納されるとき、オペレータ作動デバイス70は、より詳細に下で議論されるであろうように、カム52のカム面56に摺動可能に係合するための係合解除位置116(図18)にある。
[0030]図2および3に更に示すように、機械式作動システム10は、ハウジング22の中で軸受76によって軸80のまわりに枢動可能または回転可能に連結される機械式デバイス74を含み、軸受76は、ハウジング部分92に連結された構造体64に連結される締結体78に固定される。機械式デバイス74は、付勢デバイス94に当接してそれによって付勢される当接面86を有する本体75を含み、本体75は、面84を有する突出体82まで延び、面84は、機械式作動システム10の作動中にカム40のカム面42とカム52のカム面54との一方または両方に摺動接触し、あるいは、どちらにも摺動接触しない。示したように、機械式デバイス74は、付勢デバイス96に当接してそれによって付勢される当接面90を有する脚部88を更に含む。付勢デバイス94によって機械式デバイス74の当接面86に加えられる力の結果として生じる捩り力は、付勢デバイス96によって機械式デバイス74の脚部88の当接面90に加えられる力の結果として生じる逆向きの捩り力よりも大きく、その結果として、機械式デバイス74は、時計回り方向に回転するのを促され、係合位置106(図9)を画定する。機械式作動システム10の動作中、機械式デバイス74の面84は、下でより詳細に議論されるであろうように、カム40のカム面42とカム52のカム面54との一方または両方によって支持されてそれと摺動接触する。機械式デバイス74の面84がカム面42、54の少なくとも一方によって支持されるとき、機械式デバイス74は、係合位置106(図9)から係合解除位置104(図4)に促される。機械式デバイス74が係合解除位置104(図4)にあるとき、弁98は、閉じている。機械式デバイス74が係合位置106(図9)にあるとき、弁98は、開いている。1つの実施形態では、ヘリコプタなどの航空機などの外部デバイス12(図1)において弁98が開いているとき、航空機の重要でないサブシステムには、液圧流体がもはや供給されず、タンク14(図1)に収容された液圧流体の量は、限界値に達するように更に十分に消耗されるのが防止される。本実施形態では、タンク14(図1)に収容された減ったレベルの液圧流体は、所定の限界閾値(threshold critical value)と呼ばれ、したがって、機械式デバイス74が、作動されて回転運動に促されて係合解除位置104(図4)から係合位置106(図9)になるとき、タンク14(図1)に収容された液圧流体のレベルは、航空機に損傷を招くかもしれない限界値(critical value)に達するのが防止される。
[0031]理解すべきことは、他の実施形態では、機械式作動システムが、温度、圧力、または機械的リンクに関連する他のパラメータなどの、液圧流体以外のパラメータを自動的に監視するように設計されることがあるということである。更にまた、他の実施形態では、機械式作動システムによって監視または維持されるパラメータの所定の限界閾値および限界値は、最小値を表さないことがあり、最大値であることがあり、または、用途にもよるが外部デバイスのシステムの最小動作値および最大動作値間の任意の値もしくは値の範囲であることがある。
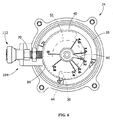
[0032]図4〜19は、ハウジング22、およびハウジング部分66、92が分かり易いように取り外されている、動作中の機械式作動システム10の例示的な実施形態を示す。それらの図面を順次進めて行く間、配向は、構成要素間の相互作用をより効果的に示すために変わるであろうし、構成要素は、分かり易さのために追加または除去されることがあろう。最後に、インジケータ60は、軸26のまわりの機械式デバイス24の連続した図面間の回転配向および/または回転配向の比較変化を示すのに役立つために利用されるであろう。即ち、インジケータ60、プーリ18、カム40、およびカム52の個々は、軸26のまわりを回転し、それらの構成要素の回転運動に関する議論は、軸26のまわりの回転を参照することを意図する。
[0033]図4に示すように、インジケータ60は、例示的な実施形態ではおよそ5.3リットルであるタンク14(図1)の流体レベルに概ね対応する。別の実施形態では、最大流体レベルは、5.3リットルより多いことがありまたは少ないことがある。示すように、機械式デバイス74は、係合解除位置104にあり、機械式デバイス74の面84は、カム40のカム面42と摺動接触する。係合解除位置104にある機械式デバイス74の結果として、弁98(図2)は閉じられ、液圧流体を必要とする任意のサブシステムに対して、機械式作動システム10によって課される制限は無い。図4は、係合位置112(カム52のカム面56の肩部114と接触するオペレータ作動デバイス70の先端72を示す図12参照)にあるオペレータ作動デバイス70を更に示す。
[0034]図5〜8は、外部デバイス12(図1)のプランジャ16(図1)に連結される細長部材20(図1)によって回転運動に促されるプーリ18の突出体36の結果としてのプーリ18およびカム40の同時回転運動102を示す。即ち、プーリ18の回転運動102に応答して、突出体36は、カム面42の肩部44の経路に延びて肩部44に接触し、同様に、カム40を回転運動102に促す。図8は、カム面42の肩部44との接合点でカム40のカム面42と接触して位置決めされる機械式デバイス74の面84を示す。この時点では、機械式デバイス74は、依然として係合解除位置104に維持される。
[0035]
図9は、図8に示したカム40の回転配向を過ぎたカム40の追加的な増加回転運動102を示すが、これにより、カム面42の肩部44が機械式デバイス74の面84を越えて回転し、カム40のカム面42にもはや摺動接触しない。もはやカム40のカム面42に摺動接触していない面84の結果として、付勢デバイス94は、付勢デバイス96に打ち勝って、係合解除位置104(図8)から係合位置106への軸80のまわりの回転運動108に機械式デバイス74を促す。換言すると、例示的な実施形態では、図9において、機械式デバイス24の回転配向は、タンク14(図1)に残っている液圧流体の限界閾値を示す、画定するもしくは対応するまたは成就する。係合位置106にある機械式デバイス74の結果として、液圧流体のこの減った限界閾値に達するのに呼応して、弁98(図2)は、タンク14(図1)に収容された液圧流体の量が、外部デバイス12(図1)を損傷させるかまたは損傷のリスクを引き起こすような、ゼロ液圧流体または十分ゼロに近い流体レベルなどの、限界値に達するのを阻止する。即ち、弁98(図2)を係合させることの結果として、必須のサブシステムからの液圧流体の要求は、十分に減少し、したがって、タンク14(図1)に収容された液圧流体の量は、それ以上減らされない。図11は、タンク14(図1)に収容された流体のレベルの増加に対応するプーリ18の回転運動110を示し、機械式デバイス74は、カム40のカム面42の肩部44に接触する係合位置106に留まっている。
図9は、図8に示したカム40の回転配向を過ぎたカム40の追加的な増加回転運動102を示すが、これにより、カム面42の肩部44が機械式デバイス74の面84を越えて回転し、カム40のカム面42にもはや摺動接触しない。もはやカム40のカム面42に摺動接触していない面84の結果として、付勢デバイス94は、付勢デバイス96に打ち勝って、係合解除位置104(図8)から係合位置106への軸80のまわりの回転運動108に機械式デバイス74を促す。換言すると、例示的な実施形態では、図9において、機械式デバイス24の回転配向は、タンク14(図1)に残っている液圧流体の限界閾値を示す、画定するもしくは対応するまたは成就する。係合位置106にある機械式デバイス74の結果として、液圧流体のこの減った限界閾値に達するのに呼応して、弁98(図2)は、タンク14(図1)に収容された液圧流体の量が、外部デバイス12(図1)を損傷させるかまたは損傷のリスクを引き起こすような、ゼロ液圧流体または十分ゼロに近い流体レベルなどの、限界値に達するのを阻止する。即ち、弁98(図2)を係合させることの結果として、必須のサブシステムからの液圧流体の要求は、十分に減少し、したがって、タンク14(図1)に収容された液圧流体の量は、それ以上減らされない。図11は、タンク14(図1)に収容された流体のレベルの増加に対応するプーリ18の回転運動110を示し、機械式デバイス74は、カム40のカム面42の肩部44に接触する係合位置106に留まっている。
[0036]図12は、オペレータ作動デバイス70の動作をより良く示す目的で、図11と比較したときの、機械式作動システム10の再配向を示す。図12に示すように、オペレータ作動デバイス70は、係合位置112にあり、先端72は、カム52のカム面56の肩部114と接触する。同時に、機械式デバイス74は、係合位置106にあり、面84は、カム52の面54によって支持されていないかまたはカム52の面54に接触していない。
[0037]図13に示すように、オペレータ作動デバイス70は、保守作業者などによって、係合位置112(図12)から係合解除位置116まで手動で作動される。係合解除位置116では、これまでカム52のカム面56の肩部114に接触していた先端72が、オペレータ作動デバイス70の本体内側に格納される。先端72が格納されてカム面56の肩部114と接触しなくなることに応答して、トルク付勢部材58(図2)は、カム52がオペレータ作動デバイス70に対して回転運動102するのを促す。
[0038]図14に示すように、ストッパ100(図3)は、カム52と係合して、トルク付勢部材58(図2)によってもたらされる回転運動102におけるカム52の過回転を防止する。トルク付勢部材58(図2)の結果として、カム52のカム面54は、機械式デバイス74の面84と接触して、係合位置106(図13および14)から係合解除位置104までの回転運動118の方向に、軸80のまわりの機械式デバイス74の回転運動を促し、係合解除位置104については、以前議論した。図15は、プーリ18の、そして、同時に、以前議論したようなトルク付勢部材46の結果としてのカム40の、回転運動110を示す。
[0039]図16は、オペレータ作動デバイス70の作動をより良く示す目的で、図15と比較して、機械式作動システム10の再配向を示す。図16〜18に示すように、タンク14(図1)の液圧流体の量の増加に応答して、プーリ18は、回転運動110に促され、そして、トルク付勢部材46の結果として、同時に、カム40を回転運動110に促す。
[0040]図18〜19に示すように、カム40の突出体48は、カム52のカム面54の肩部122と接触し、カム52を回転運動110に促す。カム52の十分な回転運動110に応答して、図19に示すように、カム52のカム面56の肩部114は、オペレータ作動デバイス70の先端72を越えて回転し、先端72が自動的に延びるのを可能にして、それによって、オペレータ作動デバイス70を係合解除位置116(図18)から係合位置112に自動的に促す(リセットする)。この新規な機械的構成のおかげで、単一のオペレータ入力、即ち、オペレータ作動デバイス70を係合解除位置116(図18)に作動させることだけが必要であり、それは、オペレータ作動デバイス70を係合解除位置116(図18)から係合位置112に促すことが自動的に起こるからであって、故障の別の機会を取り入れ、システムの信頼性を低下させることになるかもしれない電力、流体動力または他のタイプの動力を必要としない。
[0041]本発明については、好適実施形態に関して説明してきたが、当業者が理解するであろうことは、本発明の範囲から逸脱せずに様々な変更を行うことができ、また、等価なものでその要素を置き換えることができる。加えて、その本質的な範囲から逸脱せずに多くの修正を行って、特定の状況や材料を本開示の教示に適合させることができる。したがって、意図することは、本発明が本発明を実施するために企図した最良の形態として開示した特定の実施形態に限定されないこと、しかし、本発明が添付した特許請求の範囲の範囲内に入るすべての実施形態を含むこと、である。
10 機械式作動システム
12 外部デバイス
14 タンク
16 プランジャ
18 プーリ
20 細長部材
22 ハウジング
24 機械式デバイス
26 軸
28 シャフト部分
30 シャフト部分
32 軸受
34 トルク付勢部材
36 突出体
38 軸受
40 カム
42 カム面
44 肩部
46 トルク付勢部材
48 突出体
50 軸受
52 カム
54 カム面
56 カム面
58 トルク付勢部材
60 インジケータ
62 締結体
64 構造体
66 ハウジング部分
67 開口
68 締結体
70 オペレータ作動デバイス
72 格納式先端
74 機械式デバイス
75 本体
76 軸受
78 締結体
80 軸
82 突出体
84 面
86 当接面
88 脚部
90 当接面
92 ハウジング部分
94 付勢デバイス
96 付勢デバイス
98 弁
100 ストッパ
102 回転運動
104 係合解除位置
106 係合位置
108 回転運動
110 回転運動
112 係合位置
114 肩部
116 係合解除位置
118 回転運動
122 肩部
12 外部デバイス
14 タンク
16 プランジャ
18 プーリ
20 細長部材
22 ハウジング
24 機械式デバイス
26 軸
28 シャフト部分
30 シャフト部分
32 軸受
34 トルク付勢部材
36 突出体
38 軸受
40 カム
42 カム面
44 肩部
46 トルク付勢部材
48 突出体
50 軸受
52 カム
54 カム面
56 カム面
58 トルク付勢部材
60 インジケータ
62 締結体
64 構造体
66 ハウジング部分
67 開口
68 締結体
70 オペレータ作動デバイス
72 格納式先端
74 機械式デバイス
75 本体
76 軸受
78 締結体
80 軸
82 突出体
84 面
86 当接面
88 脚部
90 当接面
92 ハウジング部分
94 付勢デバイス
96 付勢デバイス
98 弁
100 ストッパ
102 回転運動
104 係合解除位置
106 係合位置
108 回転運動
110 回転運動
112 係合位置
114 肩部
116 係合解除位置
118 回転運動
122 肩部
Claims (20)
- 外部デバイスに機械式に連結可能である回転可能な第1の機械式デバイスであって、前記第1の機械式デバイスの回転配向は、前記外部デバイスによって制御可能であり、前記回転配向は、前記外部デバイスのパラメータを示す、回転可能な第1の機械式デバイスと、
前記第1の機械式デバイスの第1のカム面によって係合解除位置に摺動可能に支持される枢動可能な第2の機械式デバイスであって、所定の限界閾値に達する前記パラメータに応答して、前記第1の機械式デバイスの少なくとも一部分は、所定の回転配向まで回転運動させられ、前記第2の機械式デバイスは、前記パラメータが限界値に達するのを防止するための弁を開くために、前記係合解除位置から係合位置まで移動させられる、枢動可能な第2の機械式デバイスと、
前記第1の機械式デバイスの第2のカム面に接触する係合位置のオペレータ作動デバイスと、
を備える、機械式作動システムであって、
前記係合位置から係合解除位置まで手動で作動される前記オペレータ作動デバイスに応答して、前記第2のカム面は、回転運動させられて、前記第2の機械式デバイスを前記係合位置から前記係合解除位置に向けて移動させ、
前記オペレータ作動デバイスは、前記システムによって前記係合位置に自動的に復帰可能である、機械式作動システム。 - 前記パラメータは、前記外部デバイスの流体レベルである、請求項1に記載の機械式作動システム。
- 前記第2の機械式デバイスは、前記第2の機械式デバイスの一端を前記第1のカム面に接触するように付勢するための付勢デバイスを含む、請求項1に記載の機械式作動システム。
- 前記第1の機械式デバイスは、細長部材を受容するためのプーリを含み、前記細長部材が前記プーリおよび前記外部デバイス間に延びる、請求項1に記載の機械式作動システム。
- 前記プーリは、前記第1のカム面を有する第1のカムに接触して前記第1のカムを前記所定の回転配向に向けて回転運動させるための経路に延びる突出体を含む、請求項4に記載の機械式作動システム。
- 前記プーリは、第1のトルク付勢部材に連結される、請求項4に記載の機械式作動システム。
- 第1のカムが、前記第1のカム面を有する、請求項1に記載の機械式作動システム。
- 第2のカムが、前記第2のカム面を有する、請求項1に記載の機械式作動システム。
- 前記第1のカムは、第2のトルク付勢部材に連結される、請求項7に記載の機械式作動システム。
- 前記第2のカムは、第3のトルク付勢部材に連結される、請求項8に記載の機械式作動システム。
- 前記係合位置から係合解除位置まで手動で作動される前記オペレータ作動デバイスに応答して、前記第3のトルク付勢部材は、第3のカム面を有する前記第2のカムを回転運動させるために十分なトルクを加え、前記第3のカム面は、前記第2の機械式デバイスを前記係合位置から前記係合解除位置に向けて移動させる、請求項10に記載の機械式作動システム。
- 前記第3のトルク付勢部材によって加えられる前記第2のカムの過回転を防止するためのストッパを更に含む、請求項11に記載の機械式作動システム。
- 前記第1のカムは、前記第2のカムに接触して、前記第2のカムを、前記オペレータ作動デバイスを前記係合解除位置から前記係合位置まで作動させるように回転運動させるための経路に延びる突出体を含む、請求項11に記載の機械式作動システム。
- 回転可能な第1の機械式デバイスであって、
細長部材を受容するためのプーリであって、前記細長部材が前記プーリおよび外部デバイス間に延び、前記プーリの回転配向が前記外部デバイスによって制御可能であり、前記回転配向が前記外部デバイスのパラメータを示す、プーリと、
第1のカム面を有する第1のカムと、
第2のカム面および第3のカム面を有する第2のカムとを含む、回転可能な第1の機械式デバイスと、
前記第1のカム面によって係合解除位置に摺動可能に支持される枢動可能な第2の機械式デバイスであって、
所定の限界閾値に達する前記パラメータに応答して、前記プーリおよび前記第1のカムが、所定の回転配向まで回転運動させられ、前記第2の機械式デバイスが、前記パラメータが限界値に達するのを防止するための弁を開くために、前記係合解除位置から係合位置まで移動させられる、枢動可能な第2の機械式デバイスと、
前記第2のカム面に接触する係合位置のオペレータ作動デバイスと、
を備える、機械式作動システムであって、
前記係合位置から係合解除位置まで手動で作動される前記オペレータ作動デバイスに応答して、前記第2のカムが、回転運動させられ、前記第3のカム面が、前記第2の機械式デバイスを前記係合位置から前記係合解除位置に向けて移動させ、
前記オペレータ作動デバイスが、前記システムによって前記係合位置に自動的に復帰可能である、機械式作動システム。 - 前記パラメータは、前記外部デバイスの流体レベルである、請求項14に記載の機械式作動システム。
- 前記第2の機械式デバイスは、前記第2の機械式デバイスの一端を前記第1のカム面に接触するように付勢するための付勢デバイスを含む、請求項14に記載の機械式作動システム。
- 前記プーリは、前記第1のカム面を有する第1のカムに接触して前記第1のカムを前記所定の回転配向に向けて回転運動させるための経路に延びる突出体を含む、請求項14に記載の機械式作動システム。
- 前記プーリは、第1のトルク付勢部材に連結され、前記第1のカムは、第2のトルク付勢部材に連結され、前記第2のカムは、第3のトルク付勢部材に連結される、請求項14に記載の機械式作動システム。
- 前記係合位置から係合解除位置まで手動で作動される前記オペレータ作動デバイスに応答して、前記第3のトルク付勢部材は、第3のカム面を有する前記第2のカムを回転運動させるために十分なトルクを加え、前記第3のカム面は、前記第2の機械式デバイスを前記係合位置から前記係合解除位置に向けて移動させる、請求項18に記載の機械式作動システム。
- 前記第3のトルク付勢部材による前記第2のカムの過回転を防止するためのストッパを更に含む、請求項19に記載の機械式作動システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/119,164 | 2018-08-31 | ||
| US16/119,164 US10969803B2 (en) | 2018-08-31 | 2018-08-31 | Mechanical activation system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020042027A true JP2020042027A (ja) | 2020-03-19 |
Family
ID=67587650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019157702A Ceased JP2020042027A (ja) | 2018-08-31 | 2019-08-30 | 機械式作動システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10969803B2 (ja) |
| EP (1) | EP3617531B1 (ja) |
| JP (1) | JP2020042027A (ja) |
| CN (1) | CN110871887B (ja) |
| ES (1) | ES2877063T3 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5026570A (ja) * | 1973-07-06 | 1975-03-19 | ||
| JPS5363252U (ja) * | 1976-10-29 | 1978-05-29 | ||
| JPS55116228U (ja) * | 1979-02-10 | 1980-08-16 | ||
| JP2002255494A (ja) * | 2001-02-26 | 2002-09-11 | Komatsu Forklift Co Ltd | 傾斜計 |
| US20120111262A1 (en) * | 2010-11-05 | 2012-05-10 | Wika Alexander Wiegand Se & Co. Kg | Measuring gauge with additional indicator for overloads |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1045815A (en) | 1964-10-12 | 1966-10-19 | Dowty Rotol Ltd | Liquid reservoirs of the gaseous-pressurised type |
| DE1750322B1 (de) * | 1968-04-20 | 1971-01-14 | Messerschmitt Boelkow Blohm | Vorrichtung zum Umformen einer linearen in eine kreisfoermige Bewegung,und umgekehrt |
| FR2270143B1 (ja) | 1974-05-07 | 1976-10-15 | Messier Hispano Sa | |
| US5820071A (en) * | 1996-09-05 | 1998-10-13 | Mcdonnell Douglas Helicopter Company | Mechanical coupler/decoupler |
| EP1012497A1 (en) * | 1997-09-12 | 2000-06-28 | Jozsef Bereznai | Balance float controlled valve assembly |
| US6905009B2 (en) * | 2003-05-30 | 2005-06-14 | Borgwarner, Inc. | Bi-directional clutch having a momentary latching actuator |
| US7882778B2 (en) * | 2008-03-11 | 2011-02-08 | Woodward Hrt, Inc. | Hydraulic actuator with floating pistons |
| US7866336B1 (en) * | 2008-09-12 | 2011-01-11 | Luis Gutierrez | Mechanical emergency liquid shut-off device |
| CN101813177B (zh) * | 2009-02-20 | 2014-05-07 | 卡特彼勒公司 | 柔性齿轮传动装置、发动机和传动机构操作方法 |
| US9217339B2 (en) * | 2014-04-24 | 2015-12-22 | Ford Global Technologies, Llc | Hydraulic rolling cylinder deactivation systems and methods |
| US9416832B1 (en) * | 2015-02-02 | 2016-08-16 | The Boeing Company | Half system torque brakes |
| JP6434638B2 (ja) * | 2015-04-09 | 2018-12-05 | ニューマックス エス.ピー.エー. | 枢動可能アームの精密位置決めのための関節式レバー又はカム型作動装置 |
| IT201600080003A1 (it) * | 2016-07-29 | 2018-01-29 | Dropsa Spa | Pompa dotata di un serbatoio di contenimento di lubrificante |
-
2018
- 2018-08-31 US US16/119,164 patent/US10969803B2/en active Active
-
2019
- 2019-07-15 CN CN201910637130.9A patent/CN110871887B/zh active Active
- 2019-08-09 EP EP19191040.5A patent/EP3617531B1/en active Active
- 2019-08-09 ES ES19191040T patent/ES2877063T3/es active Active
- 2019-08-30 JP JP2019157702A patent/JP2020042027A/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5026570A (ja) * | 1973-07-06 | 1975-03-19 | ||
| JPS5363252U (ja) * | 1976-10-29 | 1978-05-29 | ||
| JPS55116228U (ja) * | 1979-02-10 | 1980-08-16 | ||
| JP2002255494A (ja) * | 2001-02-26 | 2002-09-11 | Komatsu Forklift Co Ltd | 傾斜計 |
| US20120111262A1 (en) * | 2010-11-05 | 2012-05-10 | Wika Alexander Wiegand Se & Co. Kg | Measuring gauge with additional indicator for overloads |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2877063T3 (es) | 2021-11-16 |
| EP3617531B1 (en) | 2021-05-12 |
| CN110871887A (zh) | 2020-03-10 |
| US10969803B2 (en) | 2021-04-06 |
| CN110871887B (zh) | 2023-01-10 |
| US20200073416A1 (en) | 2020-03-05 |
| EP3617531A1 (en) | 2020-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9435146B2 (en) | Safety door handle | |
| US9422061B2 (en) | Device for controlling the power of an engine and for controlling a thrust reverser device | |
| US9279511B2 (en) | Flapper relief valve | |
| US20070164996A1 (en) | Joystick controller with centre-lock | |
| US20160325442A1 (en) | Knife | |
| EP2799748A1 (en) | Valve device | |
| JP2018144122A (ja) | 打ち込み工具 | |
| EP3257745B1 (en) | Autopilot and manual control switching | |
| US9971347B2 (en) | Positioning device for a remote control of a heavy duty vehicle or an agricultural vehicle | |
| CA2757252C (en) | Manual valve operators having a lockout device | |
| JPS62279259A (ja) | オ−トチヨ−ク装置 | |
| US20210341242A1 (en) | Trigger safety systems and methods | |
| JP2020042027A (ja) | 機械式作動システム | |
| CN105765143A (zh) | 机动车门锁 | |
| US20060137596A1 (en) | Indicator device | |
| KR20150004338A (ko) | 가스 제어 밸브 | |
| US2551429A (en) | Safety trip device for motors responsive to temperature, speed, and pressure | |
| US5436419A (en) | Neutral start switch and backup alarm switch, and method of assembling the same for a manual displacement control for a hydrostatic transmission | |
| CN111108255B (zh) | 用于机动车辆部件的驱动单元 | |
| US20130228242A1 (en) | Controlled isolation valve having reinforced sealing | |
| KR20150004353A (ko) | 가스 제어 밸브 | |
| US2793541A (en) | Safety locked control handle with override | |
| KR101902226B1 (ko) | 오동작 방지 기능이 적용된 밸브 셔터 | |
| US10731386B2 (en) | Lock for a motor vehicle | |
| KR102223833B1 (ko) | 공압 지연 차단 방식 밸브 셔터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201020 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201104 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20210322 |