JP2020069975A - ハイブリッド飛行体 - Google Patents
ハイブリッド飛行体 Download PDFInfo
- Publication number
- JP2020069975A JP2020069975A JP2018206994A JP2018206994A JP2020069975A JP 2020069975 A JP2020069975 A JP 2020069975A JP 2018206994 A JP2018206994 A JP 2018206994A JP 2018206994 A JP2018206994 A JP 2018206994A JP 2020069975 A JP2020069975 A JP 2020069975A
- Authority
- JP
- Japan
- Prior art keywords
- gas turbine
- battery
- temperature
- turbine engine
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/20—Rotorcraft characterised by having shrouded rotors, e.g. flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0083—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by several motors of different type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/026—Aircraft characterised by the type or position of power plants comprising different types of power plants, e.g. combination of a piston engine and a gas-turbine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/10—Aircraft characterised by the type or position of power plants of gas-turbine type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
- B64D31/02—Initiating means
- B64D31/06—Initiating means actuated automatically
- B64D31/09—Initiating means actuated automatically in response to power plant failure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
- B64D31/16—Power plant control systems; Arrangement of power plant control systems in aircraft for electric power plants
- B64D31/18—Power plant control systems; Arrangement of power plant control systems in aircraft for electric power plants for hybrid-electric power plants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D35/00—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions
- B64D35/02—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants
- B64D35/021—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants
- B64D35/022—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants of hybrid-electric type
- B64D35/025—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants of hybrid-electric type of parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/11—Propulsion using internal combustion piston engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/12—Propulsion using turbine engines, e.g. turbojets or turbofans
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/30—Supply or distribution of electrical power
- B64U50/33—Supply or distribution of electrical power generated by combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/30—Supply or distribution of electrical power
- B64U50/34—In-flight charging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/14—Flying platforms with four distinct rotor axes, e.g. quadcopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/10—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS]
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02C—GAS-TURBINE PLANTS; AIR INTAKES FOR JET-PROPULSION PLANTS; CONTROLLING FUEL SUPPLY IN AIR-BREATHING JET-PROPULSION PLANTS
- F02C9/00—Controlling gas-turbine plants; Controlling fuel supply in air- breathing jet-propulsion plants
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/60—Efficient propulsion technologies, e.g. for aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Remote Sensing (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
Claims (3)
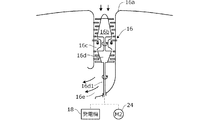
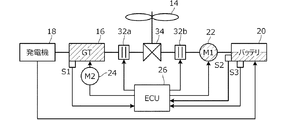
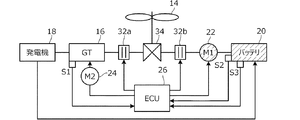
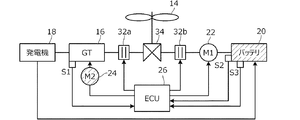
- 機体と、前記機体を推進させる推進力を生じる複数個のロータと、前記機体に取り付けられると共に、前記複数個のロータを駆動可能なガスタービン・エンジンと、前記ガスタービン・エンジンの出力軸に接続されて電力を発電する発電機と、前記発電機で発電された電力を蓄電するバッテリと、前記バッテリから電力の供給を受けて前記複数個のロータを駆動可能な電動機と、前記ガスタービン・エンジンの出力軸に接続されると共に、前記バッテリから電力の供給を受けて前記ガスタービン・エンジンを駆動可能な第2の電動機と、少なくとも前記ガスタービン・エンジンの温度を検出するエンジン温度検出手段と、前記バッテリの蓄電量を検出する蓄電量検出手段と、前記電動機と前記ガスタービン・エンジンの少なくともいずれかによる複数個のロータの駆動を調整して飛行を制御する制御部とを備えた垂直離着陸可能なハイブリッド飛行体において、前記制御部は、前記蓄電量検出手段によって検出されたバッテリの蓄電量が所定値以上のとき、前記ガスタービン・エンジンへの燃料供給を停止すると共に、前記温度検出手段によって検出されたガスタービン・エンジンの温度が所定温度以上のとき、前記バッテリから前記第2の電動機に電力を供給して前記第2の電動機で前記ガスタービン・エンジンをモータリングすることを特徴とするハイブリッド飛行体。
- 前記バッテリの故障を検出するバッテリ故障検出手段を備えると共に、前記制御部は、前記バッテリの故障が検出されたとき、前記ガスタービン・エンジンへの燃料供給を継続することを特徴とする請求項1に記載のハイブリッド飛行体。
- 前記ガスタービン・エンジンの潤滑油の温度を検出する潤滑油温度検出手段を備えると共に、前記制御部は、前記潤滑油温度検出手段によって検出された前記ガスタービン・エンジンの潤滑油の温度が規定温度以下のとき、前記バッテリから前記第2の電動機に電力を供給して前記第2の電動機で前記ガスタービン・エンジンをモータリングすることを特徴とする請求項1または請求項2に記載のハイブリッド飛行体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018206994A JP7057264B2 (ja) | 2018-11-02 | 2018-11-02 | ハイブリッド飛行体 |
| US16/660,552 US11939068B2 (en) | 2018-11-02 | 2019-10-22 | Hybrid flight vehicle |
| CN201911047281.5A CN111137460B (zh) | 2018-11-02 | 2019-10-30 | 混合动力飞行器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018206994A JP7057264B2 (ja) | 2018-11-02 | 2018-11-02 | ハイブリッド飛行体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020069975A true JP2020069975A (ja) | 2020-05-07 |
| JP7057264B2 JP7057264B2 (ja) | 2022-04-19 |
Family
ID=70516917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018206994A Active JP7057264B2 (ja) | 2018-11-02 | 2018-11-02 | ハイブリッド飛行体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11939068B2 (ja) |
| JP (1) | JP7057264B2 (ja) |
| CN (1) | CN111137460B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022099065A (ja) * | 2020-12-22 | 2022-07-04 | 本田技研工業株式会社 | 航空機用推進システム |
| JP2022099063A (ja) * | 2020-12-22 | 2022-07-04 | 本田技研工業株式会社 | 航空機用推進システム |
| JP2023143523A (ja) * | 2022-03-25 | 2023-10-06 | 本田技研工業株式会社 | 推定システム及び推定方法並びに航空機 |
| WO2025134572A1 (ja) * | 2023-12-19 | 2025-06-26 | 株式会社石川エナジーリサーチ | 飛行装置 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10906637B2 (en) | 2018-05-17 | 2021-02-02 | Textron Innovations Inc. | Assisted landing systems for rotorcraft |
| JP7021054B2 (ja) * | 2018-11-08 | 2022-02-16 | 本田技研工業株式会社 | ハイブリッド飛行体 |
| JP7049234B2 (ja) * | 2018-11-15 | 2022-04-06 | 本田技研工業株式会社 | ハイブリッド飛行体 |
| EP3798128B1 (en) * | 2019-09-25 | 2023-06-07 | StratoWave Connect j.d.o.o. | Hybrid multirotor propulsion system for an aircraft |
| KR102212086B1 (ko) * | 2020-09-08 | 2021-02-05 | 유한회사 우주무인항공산업 | 자가발전 기능을 갖는 드론 |
| JP7430134B2 (ja) * | 2020-12-22 | 2024-02-09 | 本田技研工業株式会社 | 航空機用推進システム |
| US11661185B2 (en) * | 2021-02-12 | 2023-05-30 | Textron Innovations Inc. | Redundant electric propulsion system |
| JP7533339B2 (ja) * | 2021-04-26 | 2024-08-14 | トヨタ自動車株式会社 | 飛行体 |
| JP6990477B1 (ja) * | 2021-09-14 | 2022-01-12 | 株式会社石川エナジーリサーチ | 飛行装置 |
| CN114233651A (zh) * | 2021-12-20 | 2022-03-25 | 中国科学院工程热物理研究所 | 一种轴流压缩膨胀式能量转换装置及控制方法 |
| JP2024145964A (ja) * | 2023-03-31 | 2024-10-15 | 本田技研工業株式会社 | 電力制御装置、移動体および電力制御方法 |
| CN118163973B (zh) * | 2024-05-16 | 2024-08-27 | 长春长光博翔无人机有限公司 | 一种分布式多源混合动力无人机及动力系统控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010101210A (ja) * | 2008-10-22 | 2010-05-06 | Toyota Motor Corp | 内燃機関の始動装置 |
| US20100300117A1 (en) * | 2005-05-19 | 2010-12-02 | Djamal Moulebhar | Aircraft with disengageable auxiliary power unit components |
| JP2016088111A (ja) * | 2014-10-29 | 2016-05-23 | ヤンマー株式会社 | ヘリコプター |
| US20170320584A1 (en) * | 2016-05-05 | 2017-11-09 | Pratt & Whitney Canada Corp. | Hybrid gas-electric turbine engine |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3700776B2 (ja) * | 2001-12-07 | 2005-09-28 | アイシン・エィ・ダブリュ株式会社 | 車両の駆動制御装置 |
| JP3574121B2 (ja) * | 2002-08-07 | 2004-10-06 | 本田技研工業株式会社 | ハイブリッド車両のエンジン停止始動制御装置 |
| JP4064428B2 (ja) * | 2006-05-24 | 2008-03-19 | 本田技研工業株式会社 | 内燃機関の制御装置 |
| US20080184906A1 (en) * | 2007-02-07 | 2008-08-07 | Kejha Joseph B | Long range hybrid electric airplane |
| US8727271B2 (en) * | 2008-01-11 | 2014-05-20 | Ival O. Salyer | Aircraft using turbo-electric hybrid propulsion system |
| US8128019B2 (en) * | 2008-12-12 | 2012-03-06 | Honeywell International Inc. | Hybrid power for ducted fan unmanned aerial systems |
| DE102010021026A1 (de) * | 2010-05-19 | 2011-11-24 | Eads Deutschland Gmbh | Hybrides Antriebs- und Energiesystem für Fluggeräte |
| CN105492230B (zh) * | 2013-09-02 | 2017-09-26 | 丰田自动车株式会社 | 车辆的控制装置 |
| JP2015137092A (ja) * | 2014-01-20 | 2015-07-30 | 憲太 安田 | パラレルハイブリット方式によるマルチローター航空機 |
| CN106285938A (zh) * | 2015-06-05 | 2017-01-04 | 姜志凌 | 一种独立压气升温做功的变容积深度混合发动机 |
| EP3124379B1 (de) * | 2015-07-29 | 2019-05-01 | Airbus Defence and Space GmbH | Hybrid-elektrischer antriebsstrang für vtol drohnen |
| CN105539828B (zh) * | 2015-12-08 | 2024-05-31 | 湖南众盛机械设备有限公司 | 一种自发电油电混合动力多旋翼飞行器 |
| CN105909377B (zh) * | 2016-05-06 | 2018-10-23 | 王领军 | 一种共轴油电混合动力发动机 |
| CN206125418U (zh) * | 2016-11-07 | 2017-04-26 | 南昌航空大学 | 一种混合动力飞行器 |
| CN107628241A (zh) * | 2017-09-25 | 2018-01-26 | 安徽瓦尔特机械贸易有限公司 | 一种无人机混合动力系统 |
| CN108082500A (zh) * | 2018-01-29 | 2018-05-29 | 吉林大学 | 一种固定翼式混合动力飞行器驱动装置及驱动方法 |
-
2018
- 2018-11-02 JP JP2018206994A patent/JP7057264B2/ja active Active
-
2019
- 2019-10-22 US US16/660,552 patent/US11939068B2/en active Active
- 2019-10-30 CN CN201911047281.5A patent/CN111137460B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100300117A1 (en) * | 2005-05-19 | 2010-12-02 | Djamal Moulebhar | Aircraft with disengageable auxiliary power unit components |
| JP2010101210A (ja) * | 2008-10-22 | 2010-05-06 | Toyota Motor Corp | 内燃機関の始動装置 |
| JP2016088111A (ja) * | 2014-10-29 | 2016-05-23 | ヤンマー株式会社 | ヘリコプター |
| US20170320584A1 (en) * | 2016-05-05 | 2017-11-09 | Pratt & Whitney Canada Corp. | Hybrid gas-electric turbine engine |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022099065A (ja) * | 2020-12-22 | 2022-07-04 | 本田技研工業株式会社 | 航空機用推進システム |
| JP2022099063A (ja) * | 2020-12-22 | 2022-07-04 | 本田技研工業株式会社 | 航空機用推進システム |
| JP7355726B2 (ja) | 2020-12-22 | 2023-10-03 | 本田技研工業株式会社 | 航空機用推進システム |
| JP2023143523A (ja) * | 2022-03-25 | 2023-10-06 | 本田技研工業株式会社 | 推定システム及び推定方法並びに航空機 |
| JP7787756B2 (ja) | 2022-03-25 | 2025-12-17 | 本田技研工業株式会社 | 推定システム及び推定方法並びに航空機 |
| US12528357B2 (en) | 2022-03-25 | 2026-01-20 | Honda Motor Co., Ltd. | Estimating system and estimation method and aircraft |
| WO2025134572A1 (ja) * | 2023-12-19 | 2025-06-26 | 株式会社石川エナジーリサーチ | 飛行装置 |
| JP2025097576A (ja) * | 2023-12-19 | 2025-07-01 | 株式会社石川エナジーリサーチ | 飛行装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11939068B2 (en) | 2024-03-26 |
| JP7057264B2 (ja) | 2022-04-19 |
| CN111137460B (zh) | 2023-07-07 |
| CN111137460A (zh) | 2020-05-12 |
| US20200148376A1 (en) | 2020-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7057264B2 (ja) | ハイブリッド飛行体 | |
| CN111152929B (zh) | 混合动力飞行器 | |
| JP6879866B2 (ja) | 垂直離着陸機 | |
| CN109421924B (zh) | 多旋翼直升机 | |
| CN111186584B (zh) | 混合动力飞行器 | |
| US9446842B2 (en) | Hybrid power rotary wing aircraft | |
| CN108945479B (zh) | 用于航空器的混合电动推进系统及其操作方法 | |
| CN103228872B (zh) | 应用到飞机燃气涡轮机的发电控制方法以及实施该方法的设备 | |
| US20210222629A1 (en) | Asymmetric hybrid aircraft idle | |
| US20210237887A1 (en) | Propulsion system for a helicopter | |
| US20260116551A1 (en) | Hybrid rotor drive system and hybrid rotorcraft | |
| US12441477B2 (en) | Aircraft control system, aircraft control method, and storage medium | |
| EP4019406B1 (en) | Multicopter with propulsion system | |
| JP7542461B2 (ja) | 航空機用推進システム | |
| CN114655430A (zh) | 飞行器用推进系统 | |
| US20230278713A1 (en) | Power unit control system, power unit control method, and power unit control program | |
| EP4707177A1 (en) | Propulsion assembly for an aircraft and methods for operating same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220407 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7057264 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |