JP2020119060A - 自動運転車両の軌跡設計走行制御検証方法 - Google Patents
自動運転車両の軌跡設計走行制御検証方法 Download PDFInfo
- Publication number
- JP2020119060A JP2020119060A JP2019007522A JP2019007522A JP2020119060A JP 2020119060 A JP2020119060 A JP 2020119060A JP 2019007522 A JP2019007522 A JP 2019007522A JP 2019007522 A JP2019007522 A JP 2019007522A JP 2020119060 A JP2020119060 A JP 2020119060A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- verification method
- control verification
- trajectory design
- trajectory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
Description

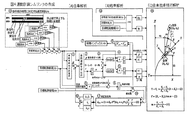
M:車両質量、I:車両慣性モーメント、l:ホィールベース、lf:重心点から前軸までの距離、lr:重心点から前軸までの距離、V:重心点速度、Vf:前軸速度、Vr:後軸速度、δ:前輪実舵角、β:車体横すべり角、βf:前輪横すべり角、βr:後輪横すべり角、ψ’(=ω):ヨーレイト、CF:前軸のコーナリングフォース、CR:後軸のコーナリングフォース、Kf:前軸コーナリング係数。Kr:後軸コーナリング係数
式(12)を展開する。
Claims (6)
- 運行経路上の、或る場所の或る車線を決めてその或る場所に入り出るまでの行程において、検討対象の自動運転車両が移動する際の占有空間が刻々と描けて、自車両に備える周辺認識装置によって周辺交通事象を認識して、その行程域を通過する過程の制御則を見出す検討に使用する自動運転車両の軌跡設計走行制御検証方法。
- 請求項1に記載の自動運転車両の軌跡設計走行制御検証方法において、道路線形の変化点座標を取得して、緯度経度のXY座標へ変換して、各変化点間を補完し、コーステーブルを作成する自動運転車両の軌跡設計走行制御検証方法。
- 請求項1に記載の自動運転車両の軌跡設計走行制御検証方法において、横方向のつり合い式と回転のつり合い式を備える車両運動モデル式を用いるシミュレーションにより、極低速時から車速上昇時の車両旋回姿勢変化を算出して走行占有領域の検討と通常の車両移動解析を可能にする自動運転車両の軌跡設計走行制御検証方法。
- 請求項1に記載の自動運転車両の軌跡設計走行制御検証方法において、自車の計画車速、他車の計画車速を設定し、その車速が信号現示時間に対応するようにして、信号時間の余裕検討を可能にする自動運転車両の軌跡設計走行制御検証方法。
- 請求項1に記載の自動運転車両の軌跡設計走行制御検証方法において、右折ギャップを時間軸と距離軸で表現して、他車との接触回避距離と接触回避時間を算出して、自車速度の増減検討ができるようにする自動運転車両の軌跡設計走行制御検証方法。
- 請求項1に記載の自動運転車両の軌跡設計走行制御検証方法において、自車の重心点を原点とする極座標で他車位置を捉え、自車の巾方向、前後方向の他車干渉余裕代を設けて自車の速度増減検討ができる自動運転車両の軌跡設計走行制御検証方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019007522A JP6995068B2 (ja) | 2019-01-21 | 2019-01-21 | 自動運転車両の軌跡設計走行制御検証方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019007522A JP6995068B2 (ja) | 2019-01-21 | 2019-01-21 | 自動運転車両の軌跡設計走行制御検証方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020119060A true JP2020119060A (ja) | 2020-08-06 |
| JP6995068B2 JP6995068B2 (ja) | 2022-01-14 |
Family
ID=71892014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019007522A Active JP6995068B2 (ja) | 2019-01-21 | 2019-01-21 | 自動運転車両の軌跡設計走行制御検証方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6995068B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112309120A (zh) * | 2020-11-04 | 2021-02-02 | 长沙理工大学 | 一种最佳进口车道选择的自动驾驶交叉口交通控制方法 |
| US20240109585A1 (en) * | 2022-09-30 | 2024-04-04 | Zoox, Inc. | Determining vehicle position using sideslip vector |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003215241A (ja) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | 車載用レーダ装置 |
| JP2009018623A (ja) * | 2007-07-10 | 2009-01-29 | Toyota Motor Corp | 走行制御装置 |
| JP2010179841A (ja) * | 2009-02-06 | 2010-08-19 | Nissan Motor Co Ltd | 旋回挙動制御装置、及び旋回挙動制御方法 |
| JP2013073480A (ja) * | 2011-09-28 | 2013-04-22 | Denso Corp | 運転支援装置、および運転支援プログラム |
| JP2015031978A (ja) * | 2013-07-31 | 2015-02-16 | 日産自動車株式会社 | 情報提供装置及び方法 |
| JP2016091039A (ja) * | 2014-10-29 | 2016-05-23 | 株式会社デンソー | 危険予測装置、運転支援システム |
| JP2017134725A (ja) * | 2016-01-29 | 2017-08-03 | トヨタ自動車株式会社 | 走行経路生成装置 |
| JP2017220028A (ja) * | 2016-06-07 | 2017-12-14 | 株式会社Subaru | 車両の走行制御装置 |
| US20180101172A1 (en) * | 2016-10-12 | 2018-04-12 | Electronics And Telecommunications Research Institute | Apparatus and method for sharing and learning driving environment data to improve decision intelligence of autonomous vehicle |
| JP2018060512A (ja) * | 2016-10-06 | 2018-04-12 | 株式会社アドバンスド・データ・コントロールズ | 画像生成システム、プログラム及び方法並びにシミュレーションシステム、プログラム及び方法 |
-
2019
- 2019-01-21 JP JP2019007522A patent/JP6995068B2/ja active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003215241A (ja) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | 車載用レーダ装置 |
| JP2009018623A (ja) * | 2007-07-10 | 2009-01-29 | Toyota Motor Corp | 走行制御装置 |
| JP2010179841A (ja) * | 2009-02-06 | 2010-08-19 | Nissan Motor Co Ltd | 旋回挙動制御装置、及び旋回挙動制御方法 |
| JP2013073480A (ja) * | 2011-09-28 | 2013-04-22 | Denso Corp | 運転支援装置、および運転支援プログラム |
| JP2015031978A (ja) * | 2013-07-31 | 2015-02-16 | 日産自動車株式会社 | 情報提供装置及び方法 |
| JP2016091039A (ja) * | 2014-10-29 | 2016-05-23 | 株式会社デンソー | 危険予測装置、運転支援システム |
| JP2017134725A (ja) * | 2016-01-29 | 2017-08-03 | トヨタ自動車株式会社 | 走行経路生成装置 |
| JP2017220028A (ja) * | 2016-06-07 | 2017-12-14 | 株式会社Subaru | 車両の走行制御装置 |
| JP2018060512A (ja) * | 2016-10-06 | 2018-04-12 | 株式会社アドバンスド・データ・コントロールズ | 画像生成システム、プログラム及び方法並びにシミュレーションシステム、プログラム及び方法 |
| JP2018060511A (ja) * | 2016-10-06 | 2018-04-12 | 株式会社アドバンスド・データ・コントロールズ | シミュレーションシステム、シミュレーションプログラム及びシミュレーション方法 |
| US20180101172A1 (en) * | 2016-10-12 | 2018-04-12 | Electronics And Telecommunications Research Institute | Apparatus and method for sharing and learning driving environment data to improve decision intelligence of autonomous vehicle |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112309120A (zh) * | 2020-11-04 | 2021-02-02 | 长沙理工大学 | 一种最佳进口车道选择的自动驾驶交叉口交通控制方法 |
| CN112309120B (zh) * | 2020-11-04 | 2021-10-22 | 长沙理工大学 | 一种最佳进口车道选择的自动驾驶交叉口交通控制方法 |
| US20240109585A1 (en) * | 2022-09-30 | 2024-04-04 | Zoox, Inc. | Determining vehicle position using sideslip vector |
| US12252200B2 (en) * | 2022-09-30 | 2025-03-18 | Zoox, Inc. | Determining vehicle position using sideslip vector |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6995068B2 (ja) | 2022-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Guvenc et al. | Autonomous road vehicle path planning and tracking control | |
| CN110531740B (zh) | 一种智能车智能化程度量化测评方法 | |
| CN109684702B (zh) | 基于轨迹预测的行车风险辨识方法 | |
| Yoo et al. | Stackelberg game based model of highway driving | |
| Maroto et al. | Real-time traffic simulation with a microscopic model | |
| Lattarulo et al. | Urban Motion Planning Framework Based on N‐Bézier Curves Considering Comfort and Safety | |
| EP4090567B1 (en) | Cross-platform control profiling for autonomous vehicle control | |
| Lima | Optimization-based motion planning and model predictive control for autonomous driving: With experimental evaluation on a heavy-duty construction truck | |
| EP4227641B1 (en) | Methods and systems for automatic problematic maneuver detection and adapted motion planning | |
| CN110023165A (zh) | 车辆控制装置 | |
| González et al. | Control architecture for cybernetic transportation systems in urban environments | |
| US20220340160A1 (en) | Systems and methods for simulation supported map quality assurance in an autonomous vehicle context | |
| Malayjerdi et al. | Practical path planning techniques in overtaking for autonomous shuttles | |
| Lin et al. | Coordinated control architecture for motion management in ADAS systems | |
| Liu et al. | Optimum path-tracking control for inverse problem of vehicle handling dynamics | |
| CN113692373A (zh) | 自动驾驶车辆服务的滞留和范围分析 | |
| Weiss et al. | High speed emulation in a vehicle-in-the-loop driving simulator | |
| Manawadu et al. | Analysis of preference for autonomous driving under different traffic conditions using a driving simulator | |
| JP6995068B2 (ja) | 自動運転車両の軌跡設計走行制御検証方法 | |
| Raj et al. | Analysis and modelling of passing sight distance using vehicle dynamic response | |
| Abdelgawad et al. | A Modular Architecture of an Interactive Simulation and Training Environment for Advanced Driver Assistance Systems | |
| Pieroni et al. | Light vehicle model for dynamic car simulator | |
| Félez et al. | A full driving simulator of urban traffic including traffic accidents | |
| da Silva Junior et al. | From design to application: Emergency maneuver control in a 1: 3.33 scaled vehicle | |
| Meng et al. | A novel test platform for automated vehicles considering the interactive behavior of multi-intelligence vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200507 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210310 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210416 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6995068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |