JP2020170130A - 撮像システムおよび撮像方法 - Google Patents
撮像システムおよび撮像方法 Download PDFInfo
- Publication number
- JP2020170130A JP2020170130A JP2019072655A JP2019072655A JP2020170130A JP 2020170130 A JP2020170130 A JP 2020170130A JP 2019072655 A JP2019072655 A JP 2019072655A JP 2019072655 A JP2019072655 A JP 2019072655A JP 2020170130 A JP2020170130 A JP 2020170130A
- Authority
- JP
- Japan
- Prior art keywords
- soft container
- imaging system
- liquid
- underwater structure
- underwater
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Camera Bodies And Camera Details Or Accessories (AREA)
- Structure And Mechanism Of Cameras (AREA)
- Accessories Of Cameras (AREA)
- Studio Devices (AREA)
Abstract
【課題】犠牲陽極などの水中構造物と接触する液体の透明度が低い場合でも、水中構造物を明瞭に撮影することができる撮像システムおよび撮像方法を提供する。【解決手段】撮像システム1は、撮像装置10と、水中構造物5の表面形状に沿って変形可能な袋状の軟質容器20とを備えている。撮像装置10の少なくとも対物レンズ12は、軟質容器20の内部に配置されており、軟質容器20の少なくとも一部は、透明である。【選択図】図1
Description
本発明は、撮像システムおよび撮像方法に関し、特にポンプや船舶などに取り付けられた犠牲陽極などの水中構造物を撮影する撮像システムおよび撮像方法に関する。
金属材料から成るポンプを、塩分が含まれた液体中(例えば、海水)に設置した場合、時間の経過とともにポンプが腐食される。そこで、このようなポンプの腐食を防止するためにポンプ表面に犠牲陽極を取り付けることが従来から行われている。ポンプ表面に取り付けられた犠牲陽極は、電気化学的反応により積極的に腐食し、結果としてポンプの腐食を防止することができる。このような犠牲陽極は、船舶などの海洋構造物の腐食対策としても使用することができる。犠牲陽極の腐食が進むと、犠牲陽極を交換する必要がある。そのため、犠牲陽極を定期的に観察し、腐食状況を確認する必要がある。
しかしながら、ポンプや犠牲陽極と接触する液体は、通常濁っており、液体の透明度は低いことが多い。このような場合、水中カメラ等の撮像装置を用いて犠牲陽極を明瞭に撮影することは難しい。
本発明は、上述した従来の問題点に鑑みてなされたもので、犠牲陽極などの水中構造物と接触する液体の透明度が低い場合でも、水中構造物を明瞭に撮影することができる撮像システムおよび撮像方法を提供することを目的とする。
一態様では、撮像装置と、水中構造物の表面形状に沿って変形可能な袋状の軟質容器とを備え、前記撮像装置の少なくとも対物レンズは、前記軟質容器の内部に配置されており、前記軟質容器の少なくとも一部は、透明である、撮像システムが提供される。
一態様では、前記軟質容器は、透明な液体で満たされている。
一態様では、前記撮像システムは、前記水中構造物を照明する照明器をさらに備え、前記照明器は、前記軟質容器の内部に配置されている。
一態様では、前記撮像システムは、前記軟質容器の内部に連通する液体供給ラインをさらに備えている。
一態様では、前記撮像システムは、水中を移動可能な水中ロボットをさらに備え、前記撮像装置は、前記水中ロボットに連結されている。
一態様では、前記撮像システムは、前記水中構造物との距離を測定する非接触式の測距装置をさらに備えている。
一態様では、前記軟質容器は、透明な液体で満たされている。
一態様では、前記撮像システムは、前記水中構造物を照明する照明器をさらに備え、前記照明器は、前記軟質容器の内部に配置されている。
一態様では、前記撮像システムは、前記軟質容器の内部に連通する液体供給ラインをさらに備えている。
一態様では、前記撮像システムは、水中を移動可能な水中ロボットをさらに備え、前記撮像装置は、前記水中ロボットに連結されている。
一態様では、前記撮像システムは、前記水中構造物との距離を測定する非接触式の測距装置をさらに備えている。
一態様では、撮像装置の少なくとも対物レンズを、少なくとも一部が透明な袋状の軟質容器で覆い、前記軟質容器を透明な液体で満たし、前記軟質容器を水中構造物に押し付けて、前記軟質容器を前記水中構造物の表面形状に沿って変形させながら、前記水中構造物を撮影する撮像方法が提供される。
一態様では、前記軟質容器の内部に前記透明な液体を供給しながら、前記水中構造物を撮影する。
一態様では、前記軟質容器の内部に前記透明な液体を供給しながら、前記水中構造物を撮影する。
軟質容器の少なくとも一部は透明であり、軟質容器の内部に透明な液体を入れて、軟質容器を水中構造物の表面形状に沿って変形させることができる。したがって、撮像システムは、実質的に、水中構造物と撮像装置との間に軟質容器と透明な液体のみが介在した状態で、水中構造物を撮影することができる。結果として、撮像システムは、水中構造物と接触する液体の透明度が低い場合でも、水中構造物を明瞭に撮影することができる。
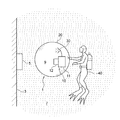
以下、本発明の実施形態について図面を参照して説明する。図1は、撮像システムの一実施形態を示す模式図である。図1に示すように、撮像システム1は、水中構造物を撮影する撮像装置10と、軟質容器20と、水中構造物を照明する照明器30とを備えている。本実施形態の撮像装置10は、水などの液体中で動作可能な水中カメラである。軟質容器20は、軟質材料から成り、水中構造物の表面形状に沿って変形可能な袋状の容器である。撮像装置10は、CCDやCMOSなどのイメージセンサ等を有するカメラ本体11と、カメラ本体11に連結された対物レンズ12とを備えている。
軟質容器20は、その内部に液体を入れることが可能になっており、密閉可能に構成されている。したがって、軟質容器20は、その内部に液体を閉じ込めることが可能になっている。本実施形態では、軟質容器20は、透明な液体9で満たされており、撮像装置10および照明器30の全体は軟質容器20の内部に配置されている。液体9の一例として、水が挙げられる。
軟質容器20の少なくとも一部は、透明である。より具体的には、軟質容器20全体のうち撮像装置10の画角の範囲内に位置する部分が透明である。一実施形態では、軟質容器20の全体が透明でもよく、さらに一実施形態では、撮像装置10の画角の範囲外に位置する軟質容器20の一部は、透明でなくてもよい。軟質容器20の例として、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、ポリエステル、ナイロンなどの軟質の合成樹脂から構成された変形可能な袋が挙げられる。
このような構成により、撮像装置10は、軟質容器20および液体9を通して水中構造物を撮影できるようになっている。撮像システム1は、汚れた水など、透明度が低い液体中に配置された水中構造物の観察に好適に使用される。図1および後述する図2では、水中構造物の一例として、ポンプ3に取り付けられた犠牲陽極5を示す。図1および図2に示す例では、ポンプ3は、透明度の低い液体である泥水7の中に設置されており、犠牲陽極5は、泥水7の中に配置されている。
図2は、撮像システム1を使用した撮像方法の一実施形態を示す模式図である。撮像装置10および照明器30を軟質容器20の内部に入れることによって、撮像装置10および照明器30を軟質容器20で覆い、軟質容器20を液体9で満たす。軟質容器20を液体9で満たした後、軟質容器20を密閉する。
そして、撮影者としてのダイバー40が撮像システム1を持って泥水7中に潜り、犠牲陽極5を撮像装置10によって撮影する。具体的には、ダイバー40が軟質容器20を水中構造物(犠牲陽極5)に押し付けて、軟質容器20を犠牲陽極5の表面形状に沿って変形させながら犠牲陽極5を撮影する。
軟質容器20は、犠牲陽極5に押し付けられたとき、液体9の圧力によって、犠牲陽極5の表面形状に沿って変形するので、犠牲陽極5と軟質容器20との間に存在する泥水7を排除することができる。したがって、撮像システム1は、実質的に、犠牲陽極5と撮像装置10との間に軟質容器20と液体9のみが介在した状態で犠牲陽極5を撮影することができる。
本実施形態では、照明器30は、軟質容器20の内部に配置されている。そのため、照明器30と、犠牲陽極5との間に実質的に泥水7が介在しない状態で、照明器30は、犠牲陽極5を照明することができる。これにより、撮像装置10は、犠牲陽極5を鮮明に撮影することができる。一実施形態では、撮像システム1は、照明器30を備えていなくてもよい。例えば、犠牲陽極5に太陽光などの外部からの光が十分に届くような環境下では、照明器30を省略することができる。
図3は、撮像システム1の他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図1および図2を参照して説明した実施形態と同じであるので、その重複する説明を省略する。本実施形態では、撮像装置10の少なくとも対物レンズ12が軟質容器20の内部に配置されており、カメラ本体11は、軟質容器20の外部に配置されている。
焦点距離の調整や、シャッタースピードの調整をカメラ本体11で行う場合など、軟質容器20を介してカメラ本体11を操作することが困難な場合は、図3に示すように対物レンズ12を軟質容器20で覆い、カメラ本体11を軟質容器20の外に配置してもよい。
本実施形態においても、軟質容器20は液体9で満たされている。一実施形態では、軟質容器20を液体9で満たした後、少なくとも対物レンズ12を軟質容器20で覆い、その後、軟質容器20を密閉してもよい。さらに一実施形態では、撮像装置10と軟質容器20の接触部からの液体9の漏れ防止や、上記接触部からの泥水7の軟質容器20の内部への侵入防止のために、撮像装置10と軟質容器20の接触部をシールしてもよい。
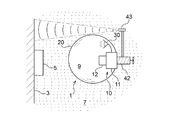
図4は、撮像システム1のさらに他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図1および図2を参照して説明した実施形態と同じであるので、その重複する説明を省略する。本実施形態では、撮像システム1は、軟質容器20の内部に連通する液体供給ライン15をさらに備えている。本実施形態では、軟質容器20の内部は、液体供給ライン15を通じて軟質容器20の外部に連通している。
液体供給ライン15は、軟質容器20の貫通孔20aを通って延びている。液体供給ライン15の一端は、軟質容器20の内部に配置されており、他端は図示しない液体供給源(例えば、貯水タンクや水道の蛇口)に接続されている。本実施形態では、撮像システム1は、液体供給ライン15を通じて、液体供給源から軟質容器20の内部に液体9を供給できるように構成されている。
本実施形態では、軟質容器20の破損などによって軟質容器20内の液体9が外部に漏れた場合等において、液体供給ライン15を通じて、軟質容器20の内部に液体9を追加供給することができる。
一実施形態では、液体供給ライン15を貫通孔20aから引き抜き可能に構成してもよい。軟質容器20内に液体9を供給した後、液体供給ライン15を貫通孔20aから引き抜き、貫通孔20aを図示しない蓋で塞ぐことにより軟質容器20を密閉してもよい。
図4を参照して説明した実施形態は、図3を参照して説明した実施形態にも適用することができる。これらの実施形態の組み合わせによれば、対物レンズ12を軟質容器20で覆った後、液体供給ライン15を通じて、軟質容器20の内部に液体9を供給し、軟質容器20を液体9で満たすことができる。
図5は、撮像システム1のさらに他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図4を参照して説明した実施形態と同じであるので、その重複する説明を省略する。本実施形態の撮像システム1は、軟質容器20の内部に連通する排出管17と、排出管17に取り付けられた逆止弁18をさらに備えている。軟質容器20の内部は、排出管17を通じて逆止弁18に連通している。
液体供給ライン15から、軟質容器20の内部へ液体9の供給を続けると、やがて軟質容器20の内部は液体9で満たされる。さらに液体9の供給を続けると、軟質容器20内の液体9は、排出管17および逆止弁18を通じて軟質容器20の外部に排出される。泥水7の軟質容器20の内部への流入は逆止弁18によって防止される。
本実施形態によれば、軟質容器20の内部に清浄な液体9を供給しながら、撮像装置10は、水中構造物(犠牲陽極5)を撮影することができる。本実施形態は、図3を参照して説明した実施形態にも適用することができる。
図6は、撮像システム1のさらに他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図1および図2を参照して説明した実施形態と同じであるので、その重複する説明を省略する。本実施形態の撮像システム1は、水中(液体中)を移動可能な水中ロボット42をさらに備えている。
本実施形態では、撮像装置10は、水中ロボット42に連結されている。撮像装置10は、軟質容器20の内部に配置されており、水中ロボット42は、軟質容器20の外部に配置されている。撮像装置10は、軟質容器20で覆われている。水中ロボット42は、泥水7内を移動し、軟質容器20を犠牲陽極5に押し付けることができ、かつカメラ本体11を操作し、犠牲陽極5を撮影することができるように構成されている。水中ロボット42の一例として、水中ドローンが挙げられる。本実施形態は、図3乃至図5を参照して説明した各実施形態にも適用することができる。一実施形態では、図7に示すように、液体供給ライン15が撮像装置10を貫通していてもよい。
図8は、撮像システム1のさらに他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図6を参照して説明した実施形態と同じであるので、その重複する説明を省略する。図8に示すように、本実施形態の撮像システム1は、水中構造物(犠牲陽極5)との距離を測定する非接触式の測距装置43をさらに備えている。
測距装置43は、水中ロボット42に連結されており、撮像装置10と同じ方向を向いている。水中ロボット42は、測距装置43を操作し、測距装置43が測定した距離情報を取得することができる。水中ロボット42は、測距装置43から取得した距離情報に基づいて、水中構造物(犠牲陽極5)に接近することができる。具体的には、水中ロボット42の操作者は、距離情報に基づいて水中ロボット42の速度を制御し、軟質容器20が犠牲陽極5に勢いよく衝突することを防止することができる。測距装置43の例として、超音波やレーザーで距離を測定する距離測定器が挙げられる。本実施形態は、図1乃至図5および図7を参照して説明した各実施形態にも適用することができる。
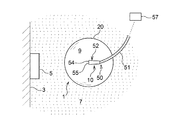
図9は、撮像システム1のさらに他の実施形態を示す模式図である。特に説明しない本実施形態の詳細は、図1および図2を参照して説明した実施形態と同じであるので、その重複する説明を省略する。本実施形態の撮像装置10は、工業用内視鏡50を備えている。工業用内視鏡50は、ケーブル51と、対物ヘッド52と、モニター部57とを備えている。工業用内視鏡50の例として、ビデオスコープおよび光ファイバースコープが挙げられる。対物ヘッド52は、ケーブル51の一端に接続され、ケーブル51の他端はモニター部57に接続されている。対物ヘッド52は、対物レンズ54と、照明器55とを少なくとも備えている。作業員は、ケーブル51を通じて対物ヘッド52から送られてくる画像(映像)をモニター部57上で観察することができる。
本実施形態では、対物ヘッド52は、軟質容器20の内部に配置されている。対物ヘッド52は、軟質容器20で覆われている。本実施形態では、作業員は、泥水7の外側で工業用内視鏡50を操作し、軟質容器20を水中構造物(犠牲陽極5)に押し付けることができる。工業用内視鏡50は、犠牲陽極5を明瞭に撮影することができる。一実施形態では、工業用内視鏡50は、硬性鏡であってもよい。本実施形態は、図3乃至図8を参照して説明した各実施形態にも適用することができる。
上述した各実施形態の撮像システム1の軟質容器20の少なくとも一部は透明である。軟質容器20の内部に透明な液体9を入れると、軟質容器20は水中構造物(例えば、犠牲陽極5)の表面形状に沿って変形することができる。したがって、撮像システム1は、実質的に、水中構造物と撮像装置10との間に軟質容器20と液体9のみが介在した状態で、水中構造物を撮影することができる。結果として、撮像システム1は、水中構造物(例えば、犠牲陽極5)と接触する液体の透明度が低い場合でも、水中構造物を明瞭に撮影することができる。
上述した実施形態は、本発明が属する技術分野における通常の知識を有する者が本発明を実施できることを目的として記載されたものである。上記実施形態の種々の変形例は、当業者であれば当然になしうることであり、本発明の技術的思想は他の実施形態にも適用しうる。したがって、本発明は、記載された実施形態に限定されることはなく、特許請求の範囲によって定義される技術的思想に従った最も広い範囲に解釈されるものである。
1 撮像システム
3 ポンプ
5 犠牲陽極
7 泥水
9 液体
10 撮像装置
11 カメラ本体
12 対物レンズ
15 液体供給ライン
17 排出管
18 逆止弁
20 軟質容器
20a 貫通孔
30 照明器
40 ダイバー
42 水中ロボット
43 測距装置
50 工業用内視鏡
51 ケーブル
52 対物ヘッド
54 対物レンズ
55 照明器
57 モニター部
3 ポンプ
5 犠牲陽極
7 泥水
9 液体
10 撮像装置
11 カメラ本体
12 対物レンズ
15 液体供給ライン
17 排出管
18 逆止弁
20 軟質容器
20a 貫通孔
30 照明器
40 ダイバー
42 水中ロボット
43 測距装置
50 工業用内視鏡
51 ケーブル
52 対物ヘッド
54 対物レンズ
55 照明器
57 モニター部
Claims (8)
- 撮像装置と、
水中構造物の表面形状に沿って変形可能な袋状の軟質容器とを備え、
前記撮像装置の少なくとも対物レンズは、前記軟質容器の内部に配置されており、
前記軟質容器の少なくとも一部は、透明である、撮像システム。 - 前記軟質容器は、透明な液体で満たされている、請求項1に記載の撮像システム。
- 前記水中構造物を照明する照明器をさらに備え、
前記照明器は、前記軟質容器の内部に配置されている、請求項1または2に記載の撮像システム。 - 前記軟質容器の内部に連通する液体供給ラインをさらに備えている、請求項1乃至3のいずれか一項に記載の撮像システム。
- 水中を移動可能な水中ロボットをさらに備え、
前記撮像装置は、前記水中ロボットに連結されている、請求項1乃至4のいずれか一項に記載の撮像システム。 - 前記水中構造物との距離を測定する非接触式の測距装置をさらに備えている、請求項1乃至5のいずれか一項に記載の撮像システム。
- 撮像装置の少なくとも対物レンズを、少なくとも一部が透明な袋状の軟質容器で覆い、
前記軟質容器を透明な液体で満たし、
前記軟質容器を水中構造物に押し付けて、前記軟質容器を前記水中構造物の表面形状に沿って変形させながら、前記水中構造物を撮影する撮像方法。 - 前記軟質容器の内部に前記透明な液体を供給しながら、前記水中構造物を撮影する、請求項7に記載の撮像方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019072655A JP2020170130A (ja) | 2019-04-05 | 2019-04-05 | 撮像システムおよび撮像方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019072655A JP2020170130A (ja) | 2019-04-05 | 2019-04-05 | 撮像システムおよび撮像方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020170130A true JP2020170130A (ja) | 2020-10-15 |
Family
ID=72746973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019072655A Pending JP2020170130A (ja) | 2019-04-05 | 2019-04-05 | 撮像システムおよび撮像方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020170130A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102791957B1 (ko) * | 2024-04-30 | 2025-04-08 | (주)경동엔지니어링 | 수중 구조물 안전점검을 위한 수중 촬영장치 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6320139U (ja) * | 1986-07-25 | 1988-02-09 | ||
| JP2006233742A (ja) * | 2005-01-25 | 2006-09-07 | Ps Mitsubishi Construction Co Ltd | 地盤の視認方法及びその装置 |
| JP2016099140A (ja) * | 2014-11-18 | 2016-05-30 | 朝日航洋株式会社 | 水底観測システム |
-
2019
- 2019-04-05 JP JP2019072655A patent/JP2020170130A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6320139U (ja) * | 1986-07-25 | 1988-02-09 | ||
| JP2006233742A (ja) * | 2005-01-25 | 2006-09-07 | Ps Mitsubishi Construction Co Ltd | 地盤の視認方法及びその装置 |
| JP2016099140A (ja) * | 2014-11-18 | 2016-05-30 | 朝日航洋株式会社 | 水底観測システム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102791957B1 (ko) * | 2024-04-30 | 2025-04-08 | (주)경동엔지니어링 | 수중 구조물 안전점검을 위한 수중 촬영장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106353833B (zh) | 浑浊水域水下探测装置 | |
| KR100889425B1 (ko) | 광자 부표 | |
| KR101873743B1 (ko) | 선박 저면 검사용 수중영상시스템 | |
| JP2001247086A (ja) | 無人潜水機およびその位置保持制御方法 | |
| US8200074B1 (en) | Apparatus for murky water camera inspection of under-water construction features | |
| US5369455A (en) | Apparatus for cameras permitting the taking of in situ pictures in water | |
| JP2020170130A (ja) | 撮像システムおよび撮像方法 | |
| KR101402297B1 (ko) | 해양 구조물의 수중 촬영을 위한 챔버장치 | |
| CN105197206B (zh) | 一种索驱动水下检测机器人 | |
| US20090128623A1 (en) | Hull-mounted underwater camera remote monitoring system for vessel running gear | |
| US2396267A (en) | Device for viewing underwater | |
| JP7020640B2 (ja) | 水中撮影装置 | |
| JP2018062810A (ja) | 水中調査装置および方法 | |
| KR100272428B1 (ko) | 수중 촬영기의 보조기구 | |
| KR20170081367A (ko) | 재장전수집수조의 가변길이 조절용 카메라팔을 가진 여과기 점검로봇 | |
| KR102099056B1 (ko) | 드론을 활용한 수중시설 안전점검 시스템 | |
| CN215867480U (zh) | 一种水下保护装置和水下摄像设备 | |
| JP2000128076A (ja) | 水中点検観測装置 | |
| KR102791957B1 (ko) | 수중 구조물 안전점검을 위한 수중 촬영장치 | |
| CN1049782C (zh) | 一种用于混浊海域的水下电视系统 | |
| KR100611355B1 (ko) | 상수도 관로 검사 장치 | |
| JP6800709B2 (ja) | 放射線撮影装置 | |
| KR20160000234A (ko) | 고화질 해저면 영상획득장치 | |
| JP5467548B2 (ja) | 画像処理システム及び方法 | |
| CN205336402U (zh) | 一种浑水成像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221129 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230530 |