JP2020171084A - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP2020171084A JP2020171084A JP2019070094A JP2019070094A JP2020171084A JP 2020171084 A JP2020171084 A JP 2020171084A JP 2019070094 A JP2019070094 A JP 2019070094A JP 2019070094 A JP2019070094 A JP 2019070094A JP 2020171084 A JP2020171084 A JP 2020171084A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- encoder
- bracket
- motor case
- attached
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
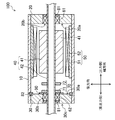
【解決手段】モータ100は、モータケース10と、モータケース10の両端の開口をそれぞれ覆う第1及び第2のブラケット20,30と、モータケース10の内部に収容され、軸心に回転軸42を有する回転子40と、固定子50と、第1及び第2のブラケット20,30にそれぞれ取付けられた第1及び第2の軸受61,62と、回転軸42の回転速度を検出するエンコーダ70と、を備えている。回転軸42は、第1及び第2のブラケット20,30をそれぞれ貫通してモータケース10の外部に突出している。エンコーダ70は、第2のブラケット30に取付けられてモータケース10の内部に収容されている。
【選択図】図2
Description
[モータの構成及びエンコーダの取付け構造]
図1は、本実施形態に係るモータの斜視組立図を、図2は、図1のII−II線での断面模式図をそれぞれ示す。なお、図1,2は、モータ100の構造を模式的に図示しているものであって、実際の形状や寸法とは異なっている。
以上説明したように、本実施形態に係るモータ100は、両端が開口された筒状のモータケース10と、モータケース10の両端の開口をそれぞれ覆うように設けられた第1及び第2のブラケット20,30と、モータケース10の内部に収容され、軸心に回転軸42を有する回転子40と、モータケース10の内部に収容され、かつ回転子40と所定の間隔をあけて設けられた固定子50と、第1及び第2のブラケット20,30にそれぞれ取付けられ、回転軸42を回転可能に支持する第1及び第2の軸受61,62と、回転軸42の回転速度を検出するエンコーダ70と、を少なくとも備えている。
図4は、本実施形態2に係るモータの斜視組立図を、図5は、図4のV−V線での断面模式図をそれぞれ示す。図1,2と同様、図4、5は、モータ100aの構造を模式的に図示しているものであって、実際の形状や寸法とは異なっている。なお、図4,5において、実施形態1と同様の箇所については同一の符号を付して詳細な説明を省略する。
図6は、本実施形態に係るモータの断面模式図を示し、図7は、比較のためのモータの断面模式図を示す。なお、図6,7において、実施形態1と同様の箇所については同一の符号を付して詳細な説明を省略する。
図8は、本変形例に係るモータの断面模式図を示す。なお、図8において、実施形態1と同様の箇所については同一の符号を付して詳細な説明を省略する。
なお、変形例を含む実施形態1,2において、回転軸42が中空構造を有する例を示したが、中実構造であってもよい。また、所定の強度や剛性が確保できれば、第1及び第2のブラケット20,30は樹脂製でもよい。同様に、支持部材90は樹脂製でもよい。
20 第1のブラケット
20a 第1のブラケット20の内側面
20b 第1の凹部
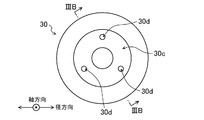
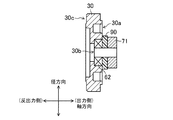
30 第2のブラケット
30a 第2のブラケット30の内側面
30b 第2の凹部
30c 第2のブラケット30の外側面
30d ねじ孔
40 固定子
41 固定子コア
42 回転軸
50 固定子
51 ヨーク
52 コイル
61 第1の軸受
62 第2の軸受
70 エンコーダ
71 受発光器
72 反射板
73 外容器
74 磁気リング
75 実装基板
76 センサIC
81 第1のシール材
82 第2のシール材(Oリング)
90、90a 支持部材
91 固定台
100、100a モータ
Claims (10)
- 両端が開口された筒状のモータケースと、
前記モータケースの両端の開口をそれぞれ覆うように設けられた第1及び第2のブラケットと、
前記モータケースの内部に収容され、軸心に回転軸を有する回転子と、
前記モータケースの内部に収容され、かつ前記回転子と所定の間隔をあけて設けられた固定子と、
前記第1及び第2のブラケットにそれぞれ取付けられ、前記回転軸を回転可能に支持する第1及び第2の軸受と、
前記回転軸の回転速度を検出するエンコーダと、を少なくとも備え、
前記回転軸は、前記第1及び第2のブラケットをそれぞれ貫通して前記モータケースの外部に突出しており、
前記エンコーダは、第2のブラケットに取付けられて前記モータケースの内部に収容されていることを特徴とするモータ。 - 請求項1に記載のモータにおいて、
前記エンコーダは、前記第2のブラケットの内側面に取付けられた支持部材を介して取付けられていることを特徴とするモータ。 - 請求項1に記載のモータにおいて、
前記第2のブラケットの内側面に前記第2の軸受を収容する凹部が設けられ、
前記エンコーダは、前記凹部を覆うように前記第2のブラケットに取付けられた平板状の支持部材の内側面に取付けられていることを特徴とするモータ。 - 請求項1ないし3のいずれか1項に記載のモータにおいて、
前記第2のブラケットの内側面と相対向する前記第2の軸受の面との間に位置して、前記モータケースの内部へ液体が入り込むのを防止する第1のシール材が設けられていることを特徴とするモータ。 - 請求項1ないし3のいずれか1項に記載のモータにおいて、
前記第2のブラケットの外側面に接して、前記モータケースの内部へ液体が入り込むのを防止する第1のシール材が設けられていることを特徴とするモータ。 - 請求項1ないし5のいずれか1項に記載のモータにおいて、
前記第2のブラケットと前記モータケースとが当接する部分には、弾性体で構成された第2のシール材が介在していることを特徴とするモータ。 - 請求項1ないし6のいずれか1項に記載のモータにおいて、
前記エンコーダは、反射型の光学式エンコーダであることを特徴とするモータ。 - 請求項1ないし6のいずれか1項に記載のモータにおいて、
前記エンコーダは、透過型の光学式エンコーダであることを特徴とするモータ。 - 請求項1ないし6のいずれか1項に記載のモータにおいて、
前記エンコーダは、磁気式エンコーダであることを特徴とするモータ。 - 請求項1ないし9のいずれか1項に記載のモータにおいて、
前記回転軸は、両端が開口された中空構造であることを特徴とするモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019070094A JP2020171084A (ja) | 2019-04-01 | 2019-04-01 | モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019070094A JP2020171084A (ja) | 2019-04-01 | 2019-04-01 | モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020171084A true JP2020171084A (ja) | 2020-10-15 |
Family
ID=72746412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019070094A Pending JP2020171084A (ja) | 2019-04-01 | 2019-04-01 | モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020171084A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112600361A (zh) * | 2020-12-17 | 2021-04-02 | 李宏双 | 一种机械式同步马达定位结构 |
| CN116923013A (zh) * | 2023-06-26 | 2023-10-24 | 西北工业大学 | 一种灵巧陆空两栖飞行器 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0287959A (ja) * | 1988-09-22 | 1990-03-28 | Mitsubishi Electric Corp | ブラシレスモータ |
| JPH0265079U (ja) * | 1988-11-04 | 1990-05-16 | ||
| JPH08331810A (ja) * | 1995-05-31 | 1996-12-13 | Oriental Motor Co Ltd | エンコーダ付きモーター及びその組立て方法 |
| JP2000046513A (ja) * | 1998-07-29 | 2000-02-18 | Meidensha Corp | 回転センサ |
| JP2003134738A (ja) * | 2001-09-26 | 2003-05-09 | Snr Roulements | パルス制御された電子的に整流されるモータ |
| US20030128026A1 (en) * | 1998-07-20 | 2003-07-10 | Lutz Jon F. | Accurate rotor position sensor and method using magnet ring and hall effect sensors |
| JP2003274624A (ja) * | 2002-03-15 | 2003-09-26 | Hitachi Metals Ltd | 回転角検出用磁石ユニット |
| JP2008104254A (ja) * | 2006-10-17 | 2008-05-01 | Tsubaki Emerson Co | 密閉型回転センサ内蔵モータ |
| JP2012085398A (ja) * | 2010-10-07 | 2012-04-26 | Yaskawa Electric Corp | 回転電機、風力発電システムおよび回転電機に用いる回転検出器 |
| JP2013062899A (ja) * | 2011-09-12 | 2013-04-04 | Panasonic Corp | ブラシレスモータ |
| JP2018157716A (ja) * | 2017-03-21 | 2018-10-04 | 東芝産業機器システム株式会社 | 電動機及び軸受ブラケット |
-
2019
- 2019-04-01 JP JP2019070094A patent/JP2020171084A/ja active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0287959A (ja) * | 1988-09-22 | 1990-03-28 | Mitsubishi Electric Corp | ブラシレスモータ |
| US4952830A (en) * | 1988-09-22 | 1990-08-28 | Mitsubishi Denki Kabushiki Kaisha | Brushless motor with hall elements |
| JPH0265079U (ja) * | 1988-11-04 | 1990-05-16 | ||
| JPH08331810A (ja) * | 1995-05-31 | 1996-12-13 | Oriental Motor Co Ltd | エンコーダ付きモーター及びその組立て方法 |
| US20030128026A1 (en) * | 1998-07-20 | 2003-07-10 | Lutz Jon F. | Accurate rotor position sensor and method using magnet ring and hall effect sensors |
| JP2000046513A (ja) * | 1998-07-29 | 2000-02-18 | Meidensha Corp | 回転センサ |
| JP2003134738A (ja) * | 2001-09-26 | 2003-05-09 | Snr Roulements | パルス制御された電子的に整流されるモータ |
| JP2003274624A (ja) * | 2002-03-15 | 2003-09-26 | Hitachi Metals Ltd | 回転角検出用磁石ユニット |
| JP2008104254A (ja) * | 2006-10-17 | 2008-05-01 | Tsubaki Emerson Co | 密閉型回転センサ内蔵モータ |
| JP2012085398A (ja) * | 2010-10-07 | 2012-04-26 | Yaskawa Electric Corp | 回転電機、風力発電システムおよび回転電機に用いる回転検出器 |
| JP2013062899A (ja) * | 2011-09-12 | 2013-04-04 | Panasonic Corp | ブラシレスモータ |
| JP2018157716A (ja) * | 2017-03-21 | 2018-10-04 | 東芝産業機器システム株式会社 | 電動機及び軸受ブラケット |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112600361A (zh) * | 2020-12-17 | 2021-04-02 | 李宏双 | 一种机械式同步马达定位结构 |
| CN112600361B (zh) * | 2020-12-17 | 2024-03-12 | 李宏双 | 一种机械式同步马达定位结构 |
| CN116923013A (zh) * | 2023-06-26 | 2023-10-24 | 西北工业大学 | 一种灵巧陆空两栖飞行器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7193343B2 (en) | Electric motor | |
| TW486850B (en) | Reduction gears-integrated actuator | |
| US11692890B2 (en) | Torque index sensor and steering device comprising same | |
| JP2007195370A (ja) | ブラシレスモータ及びブラシレス型ファンモータ | |
| CN107112855A (zh) | 驱动装置 | |
| CN104104163B (zh) | 旋转电机的定子铁心固定结构 | |
| WO2017002869A1 (ja) | ブラシレスモータ | |
| WO2019065007A1 (ja) | 電動アクチュエータ | |
| JP2020171084A (ja) | モータ | |
| JP2023510970A (ja) | モータ | |
| US20230054067A1 (en) | Motor | |
| KR20140002395A (ko) | 레졸버 조립구조 및 이를 포함한 모터 어셈블리 | |
| JPH09317684A (ja) | 流体ポンプ | |
| JP2013090501A (ja) | モータ | |
| WO2003075438A1 (en) | Ac electric machine for vehicle | |
| US7235908B2 (en) | Motor actuator having motor holding arrangement | |
| JP2016015812A (ja) | 電動機 | |
| JP2019068518A (ja) | 電動アクチュエータ | |
| JP7210478B2 (ja) | 自動車両ワイピングシステム用ギアモータ | |
| CN114337088A (zh) | 电动致动器 | |
| JP2009254022A (ja) | アキシャルギャップモータ | |
| EP0221459A2 (en) | Axial-flow fan apparatus | |
| JP7847109B2 (ja) | 物理量検出センサとこれを備えた回転体組立体 | |
| JP7389609B2 (ja) | モータ装置 | |
| KR100411141B1 (ko) | 진동모터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230711 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240109 |