JP2020537101A - 中間体シーカーペイロード - Google Patents
中間体シーカーペイロード Download PDFInfo
- Publication number
- JP2020537101A JP2020537101A JP2020505903A JP2020505903A JP2020537101A JP 2020537101 A JP2020537101 A JP 2020537101A JP 2020505903 A JP2020505903 A JP 2020505903A JP 2020505903 A JP2020505903 A JP 2020505903A JP 2020537101 A JP2020537101 A JP 2020537101A
- Authority
- JP
- Japan
- Prior art keywords
- door panel
- airframe
- housing
- optical sensor
- access window
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B10/00—Means for influencing, e.g. improving, the aerodynamic properties of projectiles or missiles; Arrangements on projectiles or missiles for stabilising, steering, range-reducing, range-increasing or fall-retarding
- F42B10/02—Stabilising arrangements
- F42B10/14—Stabilising arrangements using fins spread or deployed after launch, e.g. after leaving the barrel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/01—Arrangements thereon for guidance or control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/08—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles for carrying measuring instruments; Arrangements for mounting sensitive cargo within a projectile; Arrangements for acoustic sensitive cargo within a projectile
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/10—Missiles having a trajectory only in the air
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B30/00—Projectiles or missiles, not otherwise provided for, characterised by the ammunition class or type, e.g. by the launching apparatus or weapon used
- F42B30/006—Mounting of sensors, antennas or target trackers on projectiles
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Aviation & Aerospace Engineering (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
Abstract
中間体は、長手方向軸を画定し、内部区画を有する円筒状ハウジングを備える。誘導コントローラは、飛行を制御するために中間体内に収容される。複数の翼がハウジングに連結され、翼の各々は、飛行中の誘導を提供するために展開位置に移動可能である。中間体は、ハウジングの内部区画と外部環境との間の連通を容易にするアクセス窓を有する。通常はドアがアクセス窓を覆っているが、ドアがアクセス窓に対して開位置に移動したとき、内部区画と外部環境との間の連通が確立される。光学センサは、内部区画内に収容され、光学センサは、ドアがアクセス窓に対して移動されると、外部環境を見ること、及び飛行中に複数の翼の動作を制御するために誘導コントローラにデータを供給することを行うことができる。【選択図】 図3
Description
[3] 本発明は、改良された中間体の展開可能なペイロードに関し、より具体的には、内部区画内に収容され、発射後に展開されることができる光学装置を有するシーカーを備えた中間体ペイロードに関する。
[5] 機体の翼下で搬送されるか又はヘリコプターの外部に結合されるものなどのマルチ発射物弾倉からのミサイルの通常の展開中に典型的に発生する、例えば、埃、汚れ、煤、排気ガス、熱、及び炎などの損傷又は遮断からできる限りそれらを保護するように、中間体内に誘導システムのシーカー光学装置が保持されかつ設計された中間体シーカーペイロードが知られている。現在、そのような誘導システムのシーカー光学装置は、発射後に展開され、ミサイルの飛行を制御するように設計された翼内に位置する(図1A及び図2参照)。各翼は、翼内に形成された何らかのタイプの光学センサを有する。発射物又はミサイルが弾倉内に保管されている間、翼は、ミサイルの中間体内に少なくとも部分的に収容された、それらの後退位置に維持される。
[6] ミサイルが弾倉から発砲又は発射されると、翼は、誘導コントローラによって自動で展開され、飛行中にミサイルを誘導することを容易にするために、本体から離れて外方に枢動される。翼が展開されると、それによって支持されるシーカー光学装置は、接近する領域、例えば、地面、空、標的等の観察を提供するような位置に移動される。4つのシーカー光学装置は、誘導コントローラと通信し、衝突されることとなる意図された標的の場所を検出するために互いに協調して動作する。誘導コントローラは、光学装置から受信された光学画像/信号を処理し、次に、意図された標的にミサイルを誘導するように適切に制御される展開された誘導翼に誘導信号を送信する。
[7] そのような翼アセンブリは、埃、汚れ、煤、排気ガス、熱、及び炎によって損傷される、又は部分的若しくは完全に遮断されることから光学装置をある程度保護するが、そのようなシステムは現在、4つの光学センサ、例えば、各翼内に収容されるものを利用し、これは、今度は、誘導制御システムのための関連コストを追加する。さらに、これらの光学センサはすべて、ガイダンス制御システムにデータを連続的に送信するので、ガイダンス制御システムが、どのセンサがどの画像を見ているかを決定することがいくらか困難な場合がある。例えば、どの1つ又は複数のセンサが地面及び/又は意図された標的を見ているのか、そしてどの1つ又は複数のセンサが空を見ているのかなどである。
[8] さらに、光学センサからのデータは、4つの光学センサが位置合わせされ、ミサイルの飛行全体にわたってこの位置合わせを一定に維持するという仮定の下で処理される。位置ずれは、典型的には、センサの実験室較正中に考慮され、これは、再構成に誤差をもたらし、システム性能を劣化させる傾向がある。翼アセンブリの構造は、超音速で動作する光学ベンチに効果的になるという要件によって駆動される。加えて、ミサイルのような機体の翼の各々に支持される光学センサは、光学システムを収容及び/又は保護するために典型的に必要とされる付加的な翼の厚さに起因して抗力をもたらす傾向がある。翼によって引き起こされる抗力はまた、機体の飛行を正確に制御することに関連する困難を複雑にする。
[10] したがって、本発明の目的は、従来技術に関連する上述の短所及び欠点を克服し、ミサイルの発射前及び発射中の両方で光学センサを適切に保護し、また、意図された標的まで機体が移動する際に機体の正確な誘導に必要な光学センサの量を最小限に抑えるミサイル誘導システムを提供することである。特に、光学センサを搬送する各翼の代わりに、中間体は、誘導翼から分離され、その下流に設置される単一の光学センサのみを支持する。発射前及び発射中に、光学センサは、中間体の内部区画内に完全に収容され、したがって、機体の発射中に典型的に発生する埃、汚れ、煤、排気ガス、熱、及び炎から保護される。中間体には、中間体に対して摺動、枢動、又は他の方法で移動させ、それによってアクセス窓を開き、その後それを通して光学センサが外部環境及び意図された標的を見ることができる、ドアパネルが設けられる。光学センサは、通常、中間体の内部区画内に位置するが、光学センサが前向き視野を有するように、中間体に対して傾斜されてもよい。この場合、光学センサは、中間体の内部区画内に保持されるため、前方視野は、いくらか制限され得る。光学センサは、ドアパネルが展開されると、アクセス窓を通って少なくとも部分的に延在するように、アクセス窓に対して移動可能であることが好ましい。中間体のアクセス窓を通って部分的に突き出るような光学センサの変位は、改良された前方視野を光学センサに提供する。ドアが中間体に沿って邪魔にならないように単に摺動される場合、光学センサは、本体から突出又は延在するように枢動又は摺動され得る。
[11] 光学センサをドアパネルの内面に固定することも可能である。この場合、ドアパネルは、中間体から延在するように中間体に対して枢動され、それによって光学センサを前方視野に露出させる。この設計では、ドアは、ドアの一方の側面が中間体から離れるように枢動し、それによって光学センサに前方視野を提供するように、長手方向軸に平行に配置されたヒンジを有することができる。ドアが、長手方向軸に対して横方向に位置合わせされたヒンジを有することも可能である。この場合、ヒンジは、ドアパネルの前部が中間体から離れて外方に枢動し、それによって光学センサを前方視野に露出させるように、ドアの後端に配置され得る。
[12] そのようなシステムでは、ドアパネルは、ミサイルの中間体の外壁と同じ又は実質的に同じ曲率半径を有するように金属板を単に湾曲させることによって、安価に製造することができる。ドアパネルは、安価な方法で簡単にスタンピングすることができる。このようにして、ドアパネルは、ドアパネルが展開又は開放されるまで、中間体の外板、シェル、又はケーシングの一部を形成する。したがって、ドアパネルは、中間体の内部空間を占有しない。結果として、中間体内の追加の領域は、したがって、センサスイート/オプションに利用可能である。同様に、1つの光学センサのみが使用されるので、光学ベンチ翼の必要性が排除され、それにより、シーカー光学装置を収容する翼を製造することに関連する全体的なコストが削減される。加えて、光学システムの全体の重量が低減される。内部空間及び重量を減らすことは、光学センサの異なる構成において有益であり得る。
[13] 従来技術のシステムと同様に用いられる4つの光学センサの代わりに1つの光学センサのみが使用されるので、シーカー光学装置の関連コストは最大75%低減される。1つの光学センサでは、従来技術のように360度の視野ではなく、前方領域の1つの象限のみが見えることに留意されたい。1つのセンサのみが使用されるので、センサの上方又は下方位置、すなわち飛行中の地面、地平線又は標的に対する機体の向きを決定することがはるかに容易である。
[14] 本発明は、レーザシーカー、レーザ誘導光学装置(光学及びシーカーシステムのタイプ)のような多くの異なる種類のシーカーシステムと共に使用されることができる。シーカー光学装置は、中間体内で保護され、これは、高感度光学センサが、パネルドアによって中間体内で一時的に封止され得ることを意味し、したがって、1つ又は複数の隣接する武器が発射システムから発射されるときに、破片、排気、熱などによって妨害、損傷、又は汚染されず、保護される。シーカーシステムを翼から取り外すことによって、ミッションの必要性に応じてシーカー及び/又はセンサを簡単に適合させることが可能になる。すなわち、標的及び標的領域のクラッターは、シーカーの最適なタイプを定義することができ、光学ベンチ翼に必要な内部空間の低減によってペイロードの変動性が増大するので、シーカーのモジュール設計によって最適な性能が達成されることができる。このようにして、撮像装置及び地上マッピング/ナビゲーションシステムを使用して、中間体がGPS誘導されることができる。
[15] シーカーシステムの展開時に機体にもたらされる抗力が最小になるように、シーカーシステムを中間体内に展開することが目的である。
[16] 別の目的は、格納中及び発射中の両方に、ミサイルの中間体内にシーカー光学装置を完全に封入することであり、シーカー光学装置は、機体の飛行特性に対して抗力又は障害を有意にもたらすことなく、飛行中に簡単に展開することができる。
[17] 本発明のさらなる目的は、格納中及び機体が発射システムの発射チューブ内にあるときに機体の中間体に沿って固定されることができる可動パネルドアを利用することである。ドアパネルの閉位置は、機体の中間体の内部区画内で、シーカー光学装置を含む誘導システムを覆い、封止し、それによって、1つ又は複数の隣接するミサイルが発射システムから発射されるときに、その光学センサを含むシーカー光学装置が、破片、煤、排気ガス、及び熱によって妨害又は損傷されることから保護する。ドアパネルは、発射物の中間体に対して摺動、枢動、又は移動するように作動されることができ、それによって、シーカー光学装置がその後それを通して観察を開始することができるアクセス窓を開く。ドアパネルは、その展開位置に移動されると、飛行中の機体の空力特性に対して最小限の影響しか及ぼさないか又は無視できるほどの影響しか及ぼさないように設計される。
[18] 中間体の誘導翼からのシーカー光学装置の除去は、翼の設計及び製造をさらに簡略化し、並びに既知の誘導翼の関連コストを低減する。翼は、いずれのシーカー光学装置も備えず、収容せず、支持しないので、翼は、一般に、従来のスタンピング処理によって容易に形成されることができる。翼が本体フレーム上で回転され、それによって、翼は中間体の外に出るので、中間体内の翼スロットシールの大部分を排除することができる。これにより、センサスイート/オプションを収容するために、中間体内の追加の領域が利用可能であり、したがって、複数のセンサ構成並びに長波及び/又は短波赤外線撮像装置を設置することが可能になる。
[19] 本発明はまた、機体のための中間体に関し、中間体及び機体の両方は、先端及び後端を有し、中間体は、長手方向軸を画定し、内部区画を有する円筒状ハウジングを備える。誘導コントローラが、機体の飛行を制御するために中間体内に収容される。複数の翼は、複数の翼の各々の先端に隣接するハウジングに枢動可能に結合された第1の端部を有する。複数の翼の各々は、飛行中の誘導を提供するために複数の翼の各々の第2の端部がハウジングから離れて延在する展開位置に後退位置から移動可能である。中間体のハウジングは、ハウジングの内部区画と外部環境との間の連通を容易にするアクセス窓を有する。ドアパネルは、ドアパネルがアクセス窓を覆う閉位置と、ハウジングの内部区画と外部環境との間の連通を容易にするためにアクセス窓に対してドアパネルが移動される開位置と、を有する。光学センサは、ハウジングの内部区画内に収容され、前方視野を有する。光学センサは、ドアパネルがその展開位置に移動されると、外部環境を見ること、及び飛行中に複数の翼の動作を制御するために誘導コントローラにデータを供給することを容易にする。
[21] 本明細書に組み込まれ、その一部を構成する添付の図面は、本発明の様々な実施形態を図示し、上記で与えられた本発明の一般的な説明及び以下で与えられる図面の詳細な説明とともに、本発明の原理を説明する役割を果たす。本発明は、添付の図面を参照して、例として説明される。
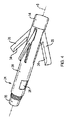
[22] 図1は、その各々がシーカー光学装置をとともに構成された、4つの翼アセンブリを含む中間体を有する従来技術の機体の絵画図である。
[23] 図2は、翼アセンブリに組み込まれたシーカー光学装置を示す、従来技術の機体の中間体の拡大絵画図である。
[24] 図3は、本発明による中間体を有する機体の絵画図であり、中間体の内部区画内でシーカー光学装置を封止及び保護するためにその通常の閉位置に位置する可動ドアパネルを含む。
[25] 図4は、翼アセンブリの下流に位置する可動ドアパネルを示す、本発明による中間体の拡大絵画図である。
[26] 図5Aは、長手方向に延在するヒンジによって連結されたドアを有する、本発明による中間体の図である。
[27] 図5Bは、ドアがその通常の閉位置にある、図5Aの中間体の断面図である。
[28] 図5Cは、ドアがその開位置に示されている、図5Aの中間体の断面図である。
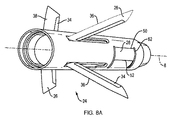
[29] 図6Aは、横方向に延在するヒンジによって連結されたドアを有する、本発明による中間体の図である。
[30] 図6Bは、ドアがその通常の閉位置にある、図6Aの中間体の断面図である。
[31] 図6Cは、ドアが開位置にある、図6Aの中間体の断面図である。
[32] 図7Aは、一対の対向する長手方向トラックを介してハウジングに連結されたドアを有する、本発明による中間体の図である。
[33] 図7Bは、ドアがその閉位置にある、図7Aの中間体の断面図である。
[34] 図7Cは、ドアがその開位置にある、図7Aの中間体の断面図である。
[35] 図8Aは、一対の横方向トラックを介してハウジングに連結されたドアを有する、本発明による中間体の図である。
[36] 図8Bは、ドアがその閉位置にある、図8Aの中間体の断面図である。
[37] 図8Cは、ドアがその開位置にある、図8Aの中間体の断面図である。
[38] 図9は、シーカー光学装置及び誘導システムを含む、本発明による中間体の一部の概略断面図である。
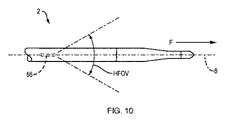
[39] 図10は、シーカー光学装置の水平視野を示す、本発明による中間体を有する機体の概略平面図である。
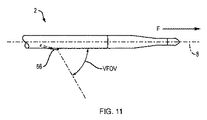
[40] 図11は、シーカー光学装置の垂直視野を示す、本発明による中間体を有する機体の概略側面図である。
[41] 図面は必ずしも縮尺通りではなく、開示された実施形態は、概略的に部分図で図示されることがあることを理解されたい。いくつかの例では、本開示の理解に必要でない詳細、又は他の詳細を理解することを困難にする詳細は省略されている場合がある。当然ながら、本開示は、本明細書に図示される特定の実施形態に限定されないことを理解されたい。
[43] 本発明は、添付の図面と併せて読まれるべきである、以下の詳細な説明を参照することによって理解されるだろう。様々な実施形態の以下の詳細な説明は、単なる例であり、本発明の範囲を限定することをいずれの場合も意味しないことを理解されたい。
[44] 図1及び図2は、従来技術の機体2’を概略的に図示する。機体2’の先端に又はその近傍に信管10’/弾頭12’が支持される一方で、その後端にロケットモータ18’が支持されている。4つの別個の翼アセンブリ6’を支持する中間体4’は、信管10’/弾頭12’とロケットモータ18’との間に位置する。機体2’は、長手方向軸又は機体中心線8を画定する。信管10’は、従来の方法で、機体2’が意図された標的に衝突すると、信管10’のすぐ後ろに位置する爆発性弾頭12’を爆発させるように機能する。中間体4’は、弾頭12’のすぐ後ろに位置し、弾頭インターフェース14’によってそれに結合される。中間体4’はまた、4つの誘導翼6’を含み、4つの翼6’のうちの各1つが、別個のシーカー光学構成要素22’を支持する。中間体4’の後端は、それにロケットモータ18’が直接結合されるロケットモータインターフェース16’を有する。従来技術のように、ロケットモータ18’は、燃料を保管し、後端からの燃料の点火、燃焼、又は放出を全体的に制御し、それによって、空気を通して機体2’の発射、推進、又は推力を提供する、様々な要素を含む。機体2’の後端は、機体2’の軌道を安定させ、制御するのを助けるために発射後に展開される複数のフィン20を含む。
[45] 次に、図3及び図4を参照して、本発明の第1の実施形態の様々な構成要素に関する簡単な説明を簡単に説明する。図から分かるように、この実施形態は、ロケット、ミサイル、又は発射物などの機体2の改良された中間体24に関する。従来技術と同様に、機体2は、長手方向軸又は機体中心線8を画定する。機体2の先端に又はその近傍に信管10/弾頭12が支持される一方で、その後端にロケットモータ18が支持されている。4つの別個の翼アセンブリ26を支持する中間体24は、信管10/弾頭12とロケットモータ18との間に位置する。信管10は、従来の方法で、機体2が意図された標的に衝突すると、信管10のすぐ後ろに位置する爆発性弾頭12を爆発させるように機能する。中間体24は、弾頭12のすぐ後ろに位置し、弾頭インターフェース14によってそれに結合される。中間体24はまた、4つの誘導翼26を含む。中間体24の後端は、ロケットモータ18が中間体24に直接結合されるロケットモータインターフェース16を有する。当技術分野では従来のように、ロケットモータ18は、燃料を保管し、機体2の後端からの燃料の点火、燃焼、又は放出を全体的に制御し、それによって、空気を通して機体2の発射、推進、又は推力を提供する、様々な要素を含む。ロケットの後端部は、その軌道を安定させ、制御するのを助けるために機体2の発射後に通常展開される複数のフィン20を含む。
[46] 図3及び図4に示すように、中間体24は、弾頭インターフェース14のすぐ後ろにある中間体の外周の周囲にほぼ均等に離間された複数の誘導翼26を含む。翼26の各々の先端は、翼26の第1の端部がハウジングに枢動可能に固定される一方で、翼26の各々が機体2の格納及び発射中にハウジングに平行に延在するそれらの通常の後退位置(図示せず)から離れて、翼26の対向する第2の端部が発射後に展開位置(図3及び図4参照)へと枢動されることができるように、中間体24に枢動可能に連結される。後退位置では、翼26は、中間体ハウジング30の外面に形成された翼凹部内に少なくとも部分的に保管又は収容され、翼26のこの収容配置は、機体2の発射弾倉への装填及び格納を容易にする。発射弾倉からの機体2の発射に続いて、翼26は、誘導コントローラ64によって従来の方法でそれらの展開位置に自動的に展開及び移動され(図3及び図4参照)、すなわち、翼26の第2の端部は、中間体ハウジング30から離れて外方に枢動される。
[47] 本発明によれば、誘導翼26は、いずれのシーカー光学装置も含まず、支持せず、又は収容しない。結果として、翼26は、簡単に形成されることができ、機体2の中間体ハウジング30の外面42に近接して配向される。したがって、翼26の後退のために中間体24内で以前に必要とされた翼スロットシール及び内部区画32の大部分を排除することができる。
[48] 翼26の各々は、機体2のヨー及びピッチ、したがって軌道を調整するために、光学システム(図9参照)によって受信された信号に基づいて誘導コントローラ64によって制御される1つ又は複数の可動/枢動可能なフラップ34を有する。中間体24の誘導翼26は、従来技術による翼6’とは対照的に、任意のシーカー光学装置又は光学センサ22’を搬送する又は含むように特別に設計又は製造されてはいないが、代わりに、概して実質的に平面であり、連続した途切れのない滑らかな前縁36並びに空気力学的に流線形の側面38を有する。翼26及びフラップ34は、抗力を最小限に抑え、飛行中の機体2の軌道の制御の改善を容易にするように設計及び成形される。このような翼26の設計、構造及び形態、並びにその制御は、一般に、当技術分野で周知であるので、これに関するさらなる説明は必要ではないと考えられる。上記の単純化された設計により、中間体24の翼26は、従来技術の翼と比較して、比較的安価かつ簡単に製造及び設置されることができる。
[49] ドアパネル28は、翼26とロケットモータインターフェース16との間で、機体2の中間体24によって支持される。図3及び図4では、ドアパネル28は、その通常の封止された閉位置で示されている。この位置において、ドアパネル28は、中間体24の外部ハウジング30の一部を形成する。誘導コントローラ64は、展開位置へのドアパネル28の作動及び移動を制御し、これに関するさらなる議論が以下に提供される。ドアパネル28は、その通常の閉位置にあるとき、中間体24内に包含された内部区画32と連通するアクセス窓54を封止しかつ覆う。光学センサ56は、内部区画32内に収容され、光学センサ56の機能及び目的に関するさらなる議論が以下に提供される。
[50] 中間体24は、図5A〜図8Cに示すように、両方が誘導翼26の下流側に位置するアクセス窓54及びドアパネル28を備える。ドアパネル28は、アクセス窓54を完全に覆うような、前縁46から後縁48までの長さと、第1の側縁50から対向する第2の側縁52までの幅とを有するほぼ矩形のプレートとして形成され得る。ドアパネル28は、一般に、パネルの長さが機体2の長手方向軸8に対して少なくとも実質的に平行になるように配置される。ドアパネル28の長さは、一般に、通常はドアパネル28の幅よりも大きいが、これは絶対的な要件ではない。ドアパネル28は、湾曲した形状に丸められるか、又は安価な方法で単にスタンピングされる金属板から作ることができる。ドアパネル28は、中間体24のハウジング30の壁厚と実質的に同じか、又はそれよりも幾分薄い壁厚を有する。ドアパネル28は、その外面40が、ドアパネル28の閉位置において、中間体ハウジング30の外面42と実質的に同一平面上にあるようなものである。言い換えれば、湾曲した金属プレートは、ドアパネル28がその閉位置にあるとき、中間体24の円筒状ハウジング30と同じ曲率の外半径又は直径を有する。結果として、ドアパネル28は、中間体24の内部区画32の多くの空間を占めることはない。したがって、中間体24内の追加の空間は、センサ/オプションなどのような他の構成要素を収容するために利用可能である。
[51] ドアパネル28がその閉位置にあるとき、ドアパネル28は、内部区画32へのアクセスを提供する、中間体24に形成されたアクセス開口部又は窓54を閉じる。ドアパネル28の外縁46、48、50、52及びアクセス窓54の内縁は、中間体24に対するドアパネル28の相対移動を支持及び可能にするために、互いに嵌合する肩部を有する又は面取りされることができる。ドアパネル28の外縁46、48、50、52及び/又は窓54の内縁は、ドアパネル28がその閉位置にあるときに、中間体24の内部区画32が外部環境に対して完全に封止されるような、封止ガスケット又は何らかの他の従来の封止が提供されることが可能である。そのような封止は、あらゆる煤、埃、汚れ、破片、排気粒子、熱などが、アクセス窓54を介して中間体24の内部区画32に入り、場合によっては光学センサ56を損傷することを防止するのに役立つ。ドアパネル28は、誘導コントローラ64が、中間体24に対してドアパネル28を移動、枢動、又は摺動させるドアパネルアクチュエータ65を作動させ、それによってアクセス窓54を開放し、その結果内部区画32内に収容された光学センサ56が外部環境を見ることができる、といったような方法で、中間体24のハウジング30に連結される。
[52] ドアパネル28の長手方向縁部は、ドアが中間体24から離れて外方に枢動することを可能にするヒンジ58を介して、ハウジングに固定されることができる。ヒンジ58は、例えば、図5A、図5B及び図5Cに示すようにドアパネル28の長手方向側縁部のいずれか一方に沿って、又は、図6A、6B及び6Cに示すようにドアパネル28の後縁に沿って位置付けられ得る。ヒンジ58がドアパネル28の長手方向側縁部50、52の一方に沿って配置される場合、ドアパネル28がドアパネルアクチュエータ65によって作動され、すなわち誘導コントローラ64によって制御され、展開位置に枢動されると、その後、アクセス窓54が開かれる。しかしながら、ドアパネル28の前縁46は、飛行中に機体2の周りを流れる空気に完全にさらされるようになり、ヒンジ58は、ドアパネル28が閉位置に戻るのを防止する一方向ヒンジとなる。
[53] 同様に、ヒンジ58がドアパネル28の後縁48に沿って配置される場合、ドアパネル28が、誘導コントローラによって制御されるドアパネルアクチュエータを介してその開放及び展開位置に枢動されると、アクセス窓54は開放されるが、ドアの内面60は、飛行中に機体2の周りを流れる空気に直接さらされる。ヒンジ58は、展開されたときにドアパネル28が中間体24のハウジング30に固定されたままであるように、ねじ、リベット、又は溶接などの従来の方法でドアパネル28及び中間体24の外面に固定することができることを理解されたい。同様に、ヒンジ(図示せず)はドアパネル28及び中間体24の内面に連結されることができる。ヒンジ58は、薄型であり得、開位置及び展開位置へのドアパネル28の枢動を容易にすることができるが、ヒンジ58によって支持及び展開されると、ドアパネル28は、中間体24のハウジング30から突出し、飛行中に機体2に少量の抗力をもたらす可能性がある。
[54] 別の実施形態によれば、中間体24の外面42は、アクセス窓54の対向する側縁に沿って(図7A〜図7C参照)、又はアクセス窓54の前縁及び後縁に沿って(図8A〜図8C参照)延在する一対のガイドトラック62を有する。すなわち、トラック62は、平行(図7A〜図7C参照)、又は機体2の長手方向軸8に対して垂直(図8A〜図8C参照)に配置される。トラック62は、アクセス窓54の縁部にほぼ隣接するか又はその上に張り出すように形成され、ドアパネル28がドアパネルアクチュエータ65を用いてその閉位置からその展開位置へと移動又は摺動されるときに、ドアパネル28の嵌合側縁部又は端縁部46、48、50、52を受け取る。このようにして、ドアパネル28は、中間体ハウジング30の外面42に沿って、中間体ハウジング30の外周の周囲で横方向に、又は長手方向軸8に平行に前方又は後方のいずれかに摺動することができる。トラック62は、ドアパネル28が薄型化されかつ飛行中に機体2にもたらされる抗力の量を最小化するように、ハウジング30に比較的近い少なくとも展開位置でドアパネル28を保持するのを捕捉的に助ける。
[55] ヒンジ52、一対のトラック62、又は何らかの他の摺動可能な取り付け機構によってドアパネル28が中間体24に移動可能に結合される代わりに、ドアパネル28は、展開されると、図9の実施形態に概して示されるように、中間体24から完全に取り外されかつ分離されるようになり、最終的に重力によって地面に落下することが可能になり得ることを理解されたい。この場合、ドアパネル28は、機体2が発射弾倉内に保管されているときにアクセス窓54がドアパネル28によって覆われかつ閉じられるように、中間体ハウジング30に解放可能に連結されることができる。発射弾倉からの機体2の発射に続いて、誘導コントローラ64によって制御されるドアパネルアクチュエータ65は、ドアパネル28をアクセス窓54及びハウジング30から離れることを強制するように作動され、その後、機体2が意図された標的に向かって移動するにつれて、中間体24から離れて落下することを可能にされる。
[56] 中間体が各翼に1つずつ4つの光学センサを有する代わりに、本発明の中間体24は、誘導翼26の下流に配置された単一の光学センサ56のみを備える。図9に概略的に示されるように、光学センサ56は、通常は中間体24のハウジング30の内部区画内に保持され、通常はドアパネル28によってその中で保護される。誘導コントローラ64がドアパネル28をその展開位置に移動させるためにドアパネルアクチュエータ65を作動させるとすぐに、光学センサ56の所望の前方視野を得るために、その光学先端部が中間体24のアクセス窓54を通って少なくとも部分的に突出又は延在するように、従来のドライバ66が光学センサ56を摺動、枢動、変位させるか、又は他の方法で展開する。あるいは、従来のドライバ66を利用する代わりに、光学センサ56は、ドアパネル28がその展開位置に移動されるとすぐに、光学センサ56が十分な前方視野を有するよう配置されるように、傾斜した向きで内部区画32内に固定して配置され得ることを理解されたい。
[57] あるいは、光学センサ56は、図5A、5B、及び図5Cに示すように、又は場合によっては図6A、図6B、及び図6Cに示すように、ドアパネル28の内側に固定されることも可能である。図5A、図5B及び図5Cによれば、ドアパネル28が中間体ハウジング30に対して内部区画32から離れてヒンジ58の周囲を枢動すると、光学センサ56は、十分な前方視野を有するように自動的に配置される。同じことが、図6A、6B、及び6Cに関しても生じる。全ての用途に対して、光学センサ56は、信号/データをそこに送ることを容易にするために、電気ケーブルによって誘導コントローラ64に結合される。
[58] 次に、光学センサ56の前方視野が、図10及び図11を参照して説明され、矢印Fによって示されるように、前方方向に移動する機体2の先頭部分を概略的に図示する。中間体24の翼26は、光学センサ56の前方視野に関する説明を明確にするために、図10及び図11には示されていない。
[59] 光学センサ56の前方視野は、(1)図10に示すような水平視野HFOV、及び(2)図11に示すような垂直視野VFOVの両方の組み合わせを含むと理解される。水平視野HFOVは、一般に、機体2が飛行中に移動するときに、光学センサ56によって見られる又は観察されることができる、機体2の前方及び左右の水平視野領域を含む。垂直視野VFOVは、一般に、機体2が飛行中に移動するときに光学センサ56によって見られる又は観察されることができる、機体2の前方及び垂直方向下方の垂直視野領域を含む。別の言い方をすれば、光学センサ56の水平視野HFOVは、機体2の長手方向軸8の左側から右側まで延在する視野領域であり、一方、光学センサ56の垂直視野VFOVは、概して光学センサ56の垂直下方から機体2の先端に隣接する領域まで延在する視野領域である。光学センサ56は、典型的には、30度〜60度の間の範囲にある水平及び垂直視野、HFOV、VFOVを有する。より好ましくは、光学センサ56の水平視野HFOVは、好ましくは40度〜50度間の範囲にあり、一方、光学センサ56の垂直視野VFOVもまた、好ましくは40度〜50度の範囲にある。
[60] 1つの光学センサ56のみが誘導コントローラ64によって利用されるので、光学システムの関連するコストは、現在知られている光学システムと比較して、例えば最大75%大幅に低減される。1つの光学センサ56では、従来技術のシステムのような360度の視野の代わりに、前方視野の1つの象限、例えば90度以下しか見られないことに留意されたい。1つの光学センサ56のみが利用されるので、誘導コントローラ64が、光学センサ56の上向き又は下向きの向き、すなわち、地面に対する機体2の向きを決定することは、一般にはるかに容易である。さらに、単一の光学センサ56から誘導コントローラ64によって受信される信号の処理は、4つの光学センサから受信される信号の処理と比較して、大幅に簡略化される。これは、制御信号が、改善された度合いで誘導コントローラ64によって翼26に送信されることをもたらし、それによって、翼26及びフラップ34の制御を強化し、並びに、飛行中の機体2の全体的な飛行特性を改善する。
[61] 本発明の様々な実施形態を詳細に説明したが、これらの実施形態の様々な修正及び変更が行われ、当業者には容易に明らかになることは、明らかである。しかしながら、そのような修正及び変更は、添付の特許請求の範囲に記載されるような、本発明の範囲及び精神の範囲内であることを明確に理解されたい。さらに、本明細書に記載の発明は、他の実施形態が可能であり、様々な他の関連する方法で実施又は実行されることができる。加えて、本明細書で使用される表現及び用語は、説明の目的のためであり、限定するものと見なされるべきではないことを理解されたい。本明細書における「含む(including)」、「備える(comprising)」、又は「有する(having)」、及びそれらの変形の使用は、その後に列挙される項目及びその等価物、並びに追加の項目を包含することを意味し、一方「〜からなる(consisting of)」及び「〜のみからなる(consisting only of)」という用語のみが限定的な意味で解釈されるべきである。
[62] 本開示の実施形態の前述の説明は、例示及び説明の目的で提示されている。網羅的であること、又は開示された厳密な形態に本開示を限定することは意図されていない。本開示に照らして、多くの修正及び変形が可能である。本開示の範囲は、この詳細な説明によってではなく、むしろ本明細書に添付の特許請求の範囲によって限定されることが意図される。
Claims (14)
- 機体の中間体であって、前記中間体及び前記機体の両方は、先端及び後端を有し、前記中間体は、
長手方向軸を画定し、内部区画を有する円筒状のハウジングと、
機体の飛行を制御するために前記中間体内に収容された誘導コントローラと、
複数の翼の各々の先端に隣接して前記ハウジングに枢動可能に結合された第1の端部を有する前記複数の翼と、ここで、前記複数の翼の各々は、飛行中の誘導を提供するために前記複数の翼の各々の第2の端部が前記ハウジングから離れて延在する展開位置に後退位置から移動可能であり、
前記中間体の前記ハウジングは、前記ハウジングの前記内部区画と外部環境との間の連通を容易にするアクセス窓を有し、
閉位置と開位置とを有するドアパネルと、ここで、前記ドアパネルは、前記閉位置で前記アクセス窓を覆い、前記開位置で前記ハウジングの前記内部区画と前記外部環境との間の連通を容易にするために前記アクセス窓に対して移動されるものであり、
前記ハウジングの前記内部区画内に収容され、前方視野を有する光学センサと、ここで、前記光学センサは、前記ドアパネルがその展開位置に移動されると、前記外部環境を見ること、及び飛行中に前記複数の翼の動作を制御するために前記誘導コントローラにデータを供給することを容易にするものであり、
を備える、機体の中間体。 - 前記アクセス窓及び前記ドアパネルの両方は、前記複数の翼とロケットモータインターフェースとの間に位置する、請求項1に記載の前記機体の中間体。
- 前記ドアパネルは、その通常の閉位置にあるとき、前記アクセス窓を封止しかつ覆い、前記内部区画内に収容された前記光学センサを保護する、請求項1に記載の前記機体の中間体。
- 前記中間体の前記先端は、弾頭への前記中間体の連結を容易にする弾頭インターフェースを有し、前記中間体の前記後端は、ロケットモータへの前記中間体の連結を容易にするロケットモータインターフェースを有する、請求項1に記載の前記機体の中間体。
- 前記複数の翼は、前記ハウジングに枢動可能に固定される第1の端部と、一方で発射後に展開位置に枢動可能である各翼の対向する第2の端部と、を各々が有する4つの誘導翼を備える、請求項4に記載の前記機体の中間体。
- 前記複数の翼は、格納位置にあるとき、前記機体の発射弾倉への装填および格納を容易にするために、前記中間体の外面に形成された翼凹部内に少なくとも部分的に収容される、請求項1に記載の前記機体の中間体。
- 前記複数の翼の各々は、飛行中の前記機体のヨー及びピッチ、したがって軌道を調整するために前記誘導コントローラによって制御される少なくとも1つの可動/枢動可能なフラップを有する、請求項1に記載の前記機体の中間体。
- 前記中間体は、30〜60度の間の範囲にある水平前方視野と、30〜60度の範囲にある垂直前方視野とを有する単一の光学センサのみを備える、請求項1に記載の前記機体の中間体。
- 信管及び弾頭が前記中間体の前記先端に連結される一方で、ロケットモータが前記中間体の前記後端に連結される、請求項1に記載の前記機体の中間体。
- 前記ドアパネルは、ヒンジによって前記ハウジングに結合され、前記ヒンジは、前記ドアパネルのその閉位置からその展開位置への枢動を容易にするために、前記ドアパネルの長手方向縁部及び前記アクセス窓に沿って固定して取り付けられている、請求項1に記載の前記機体の中間体。
- 前記ドアパネルは、ヒンジによって前記ハウジングに結合され、前記ヒンジは、前記ドアパネルのその閉位置からその展開位置への枢動を容易にするために、前記ドアパネルの後縁及び前記アクセス窓に沿って固定して取り付けられている、請求項1に記載の前記機体の中間体。
- 前記光学センサは、ドライバ及び前記誘導コントローラに連結され、前記ドライバは、前記光学センサが前記アクセス窓を通って部分的に延在するように、前記アクセス窓に対して前記光学センサを移動させる、請求項3に記載の前記機体の中間体。
- 前記ドアパネルは、前記ドアパネルがドアパネルアクチュエータによって展開されたときに前記中間体から完全に分離されるように、前記アクセス窓に取り外し可能に結合される、請求項1に記載の前記機体の中間体。
- 前記中間体は、前記アクセス窓に対する前記ドアパネルの摺動運動、及び前記ドアパネルのその閉位置からその展開位置への移動を容易にするために、前記ドアパネルの対向する縁部と嵌合する一対の対向するトラックを有する、請求項1に記載の前記機体の中間体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/665,656 US10345087B2 (en) | 2017-08-01 | 2017-08-01 | Mid body seeker payload |
| PCT/US2018/045021 WO2019028259A1 (en) | 2017-08-01 | 2018-08-02 | Mid body seeker payload |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020537101A true JP2020537101A (ja) | 2020-12-17 |
Family
ID=65229240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020505903A Withdrawn JP2020537101A (ja) | 2017-08-01 | 2018-08-02 | 中間体シーカーペイロード |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10345087B2 (ja) |
| EP (1) | EP3662225A4 (ja) |
| JP (1) | JP2020537101A (ja) |
| KR (1) | KR20210028136A (ja) |
| AU (1) | AU2018310970A1 (ja) |
| WO (1) | WO2019028259A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11168959B2 (en) * | 2019-07-31 | 2021-11-09 | Bae Systems Information And Electronic Systems Integration Inc. | Wing mounted seeker |
| US11371806B2 (en) * | 2019-08-05 | 2022-06-28 | Bae Systems Information And Electronic Systems Integration Inc. | Midbody camera/sensor navigation and automatic target recognition |
| CN111043915B (zh) * | 2019-12-09 | 2024-05-10 | 广东水利电力职业技术学院(广东省水利电力技工学校) | 一种军用导弹飞控装置 |
| US11650033B2 (en) * | 2020-12-04 | 2023-05-16 | Bae Systems Information And Electronic Systems Integration Inc. | Control plate-based control actuation system |
| CN114348237A (zh) * | 2021-12-31 | 2022-04-15 | 洛阳瑞极光电科技有限公司 | 一种小型航空器折叠翼面弹出口的封闭和锁定机构 |
| DE102022106158A1 (de) | 2022-03-16 | 2023-09-21 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Luke für ein Raketensegment, Rahmen für eine Raketensegmentöffnung zum Verbinden mit einer Luke, Raketensegment und Verfahren zur Benutzung eines Raketensegments |
| FI130682B1 (en) * | 2022-07-11 | 2024-01-16 | Raimo Hirvinen | Rocket stage, rocket and landing gear |
| US12571618B2 (en) * | 2023-10-31 | 2026-03-10 | Bae Systems Information And Electronic Systems Integration Inc. | Launch initiated low-drag seeker window cover |
| US20250239794A1 (en) * | 2024-01-24 | 2025-07-24 | Bae Systems Information And Electronic Systems Integration Inc. | Dual-orientation power and signaling system and method thereof |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3905297A (en) | 1952-01-09 | 1975-09-16 | Textron Inc | Rocket propelled incendiary bomb |
| GB1031393A (en) | 1961-09-22 | 1966-06-02 | British Aircraft Corp Ltd | Improved means for guiding a missile |
| US3924826A (en) * | 1974-12-20 | 1975-12-09 | Us Air Force | Rotatable window means |
| US4245560A (en) * | 1979-01-02 | 1981-01-20 | Raytheon Company | Antitank weapon system and elements therefor |
| US4409900A (en) * | 1981-11-30 | 1983-10-18 | The United States Of America As Represented By The Secretary Of The Army | Flyby warhead triggering |
| US4532867A (en) * | 1983-07-07 | 1985-08-06 | The United States Of America As Represented By The Secretary Of The Army | Dual field-of-view optical target detector |
| US4638737A (en) | 1985-06-28 | 1987-01-27 | The United States Of America As Represented By The Secretary Of The Army | Multi-warhead, anti-armor missile |
| SE460439C (sv) * | 1986-12-11 | 1999-06-14 | Bofors Ab | Zonrör för robot, projektil eller liknande |
| US4850275A (en) * | 1987-10-30 | 1989-07-25 | The Bdm Corporation | Aircraft hollow nose cone |
| US4867357A (en) | 1987-12-21 | 1989-09-19 | General Dynamics Corp., Pomona Division | Jettisonable protective cover device |
| FR2659747B1 (fr) * | 1990-03-16 | 1992-08-14 | Aerospatiale | Systeme de detection pour aeronef stabilise en roulis. |
| JPH063098A (ja) * | 1992-06-22 | 1994-01-11 | Mitsubishi Electric Corp | 誘導飛しょう体 |
| US5932833A (en) * | 1997-03-03 | 1999-08-03 | The United States Of America As Represented By The Secretary Of The Army | Fly over homing guidance for fire and forget missile systems |
| US6817569B1 (en) * | 1999-07-21 | 2004-11-16 | General Dynamics Ordnance And Tactical Systems, Inc. | Guidance seeker system with optically triggered diverter elements |
| IL134189A0 (en) * | 2000-01-24 | 2001-04-30 | Israel State | Device |
| IL153531A (en) * | 2002-12-19 | 2005-11-20 | Rafael Armament Dev Authority | Personal rifle-launched reconnaissance system |
| US6873893B1 (en) * | 2003-08-01 | 2005-03-29 | The United States Of America As Represented By The Secretary Of The Navy | Missile warning and protection system for aircraft platforms |
| US6851645B1 (en) * | 2003-12-05 | 2005-02-08 | Lockheed Martin Corporation | Non-coherent fresnel direction finding method and apparatus |
| WO2006088687A1 (en) | 2005-02-07 | 2006-08-24 | Bae Systems Information And Electronic Systems Integration Inc. | Optically guided munition |
| US7494089B2 (en) * | 2005-11-23 | 2009-02-24 | Raytheon Company | Multiple kill vehicle (MKV) interceptor and method for intercepting exo and endo-atmospheric targets |
| DE102010004820A1 (de) * | 2010-01-15 | 2011-07-21 | Rheinmetall Air Defence Ag | Verfahren zur Flugbahnkorrektur eines insbesondere endphasengelenkten Geschosses sowie Geschoss zur Durchführung des Verfahrens |
| US8754352B2 (en) | 2010-04-07 | 2014-06-17 | Bae Systems Information And Electronic Systems Integration Inc. | Compression spring wing deployment initiator |
| US8982210B2 (en) * | 2010-06-30 | 2015-03-17 | Lockheed Martin Corporation | Vehicle having scanning imager with fixed camera and multiple achromatic prism pairs |
| US8575527B2 (en) * | 2010-11-10 | 2013-11-05 | Lockheed Martin Corporation | Vehicle having side portholes and an array of fixed EO imaging sub-systems utilizing the portholes |
| DE102011104023B4 (de) | 2011-06-11 | 2019-07-25 | Diehl Defence Gmbh & Co. Kg | Optische Vorrichtung für einen Suchkopf für einen Lenkflugkörper und Suchkopf für einen Lenkflugkörper |
| US9194678B2 (en) | 2012-04-25 | 2015-11-24 | Wilcox Industries Corp. | Modular rocket system |
| US9039210B2 (en) | 2013-01-04 | 2015-05-26 | Raytheon Company | Variable length light shield for an electro-optical sensor within a nose cone |
| US9086258B1 (en) * | 2013-02-18 | 2015-07-21 | Orbital Research Inc. | G-hardened flow control systems for extended-range, enhanced-precision gun-fired rounds |
| DE102015009359A1 (de) * | 2015-07-17 | 2017-01-19 | Diehl Bgt Defence Gmbh & Co. Kg | Verfahren zum Schützen eines Fahrzeugs vor einem Angriff durch einen Laserstrahl |
| FR3041744B1 (fr) * | 2015-09-29 | 2018-08-17 | Nexter Munitions | Projectile d'artillerie ayant une phase pilotee. |
-
2017
- 2017-08-01 US US15/665,656 patent/US10345087B2/en active Active
-
2018
- 2018-08-02 EP EP18840579.9A patent/EP3662225A4/en not_active Withdrawn
- 2018-08-02 AU AU2018310970A patent/AU2018310970A1/en not_active Abandoned
- 2018-08-02 JP JP2020505903A patent/JP2020537101A/ja not_active Withdrawn
- 2018-08-02 WO PCT/US2018/045021 patent/WO2019028259A1/en not_active Ceased
- 2018-08-02 KR KR1020207005795A patent/KR20210028136A/ko not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP3662225A1 (en) | 2020-06-10 |
| KR20210028136A (ko) | 2021-03-11 |
| AU2018310970A1 (en) | 2020-02-20 |
| US10345087B2 (en) | 2019-07-09 |
| WO2019028259A1 (en) | 2019-02-07 |
| EP3662225A4 (en) | 2021-03-24 |
| US20190041178A1 (en) | 2019-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020537101A (ja) | 中間体シーカーペイロード | |
| US4296894A (en) | Drone-type missile | |
| US8664575B2 (en) | Miniature missile | |
| EP2203707B1 (en) | Techniques for controlling access through a slot on a projectile | |
| US20240083579A1 (en) | Projectile delivery systems and weaponized aerial vehicles and methods including same | |
| GB2329455A (en) | Guiding spin-stabilised projectiles | |
| US20120068002A1 (en) | Guided missile | |
| US8497456B2 (en) | Guided munitions including interlocking dome covers and methods for equipping guided munitions with the same | |
| ES2775445T3 (es) | Misil provisto de una cubierta separable que comprende al menos una caperuza eyectable que coopera con un elemento de soporte | |
| CN106068438A (zh) | 无人水下航行器的远距离输送 | |
| US5398887A (en) | Finless aerodynamic control system | |
| US20120055321A1 (en) | Systems and Methods for Launching Munitions | |
| IL188901A (en) | Decoy launch device for aircraft | |
| CN100467999C (zh) | 观察地面的飞行武器 | |
| GB2176881A (en) | Covering hood for aircraft munition carrier | |
| US8445823B2 (en) | Guided munition systems including combustive dome covers and methods for equipping guided munitions with the same | |
| JP2972731B1 (ja) | 誘導飛しょう体 | |
| JP2008222102A (ja) | 人工衛星 | |
| US20260008543A1 (en) | Weapons Pod For A Low Observable Aircraft And Same | |
| KR101924970B1 (ko) | 유도무기 및 유도무기의 보호덮개 방출방법 | |
| US20250297837A1 (en) | Launch-initiated eyelid window protection cover | |
| JP2912368B1 (ja) | 誘導飛しょう体およびその誘導方法 | |
| CN218097424U (zh) | 一种导弹 | |
| RU2368863C1 (ru) | Головной аэродинамический обтекатель баллистической ракеты | |
| US20180362163A1 (en) | Aircraft payload launch system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200408 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20210222 |