以下、本発明の一実施形態について、図面を参照しながら説明する。
まず、作業機1の1つであるトラクタについて説明する。図12A、図12Bに示すように、作業機1は、走行装置7を有する車体(走行車両)3と、原動機4と、変速装置5
と、を備えている。車体3には運転席10が設けられている。以下の説明においては、作業機1の運転席10に着座した運転者の前側(図12A、図12Bの矢印A1方向)を前方、運転者の後側(図12A、図12Bの矢印A2方向)を後方、運転者の左側(図12A、図12Bの手前側)を左方、運転者の右側(図12A、図12Bの奥側)を右方として説明する。また、前後方向に直交する方向である水平方向を車体幅方向として説明する。
走行装置7は、回転する車輪(前輪7F及び後輪7R)を有する装置である。車輪7F,7Rは、車軸21によって支持されており、図1に示すように前輪7Fは前車軸21Fによって支持され、後輪7Rは後車軸21Rによって支持されている。前輪7Fは、タイヤ型であってもクローラ型であってもよい。また、後輪7Rも、タイヤ型であってもクローラ型であってもよい。
原動機4は、ディーゼルエンジン、電動モータ等である。変速装置5は、変速によって走行装置7の推進力を切換可能であるとともに、走行装置7の前進、後進の切換が可能である。本実施形態においては、変速装置5は、無段変速機であり、特に油圧機械式無段変速機(HMT:Hydraulic Mechanical Transmission)である。車体3は、原動機4からの動力を伝達する出力軸(PTO軸)6を備えている。出力軸6は、車体3の後部から後方に向けて突出している。
また、図12A、図12Bに示すように、車体3は、作業装置2を着脱可能、且つ昇降可能な昇降装置8を有している。具体的には、車体3の後部には、3点リンク機構等で構成された昇降装置8が設けられている。これによって、車体3は、作業装置2を連結可能である。車体3は、作業装置2を昇降装置8に連結することによって、作業装置2を牽引することができる。
作業装置2は、芋や人参の掘り取りを行う掘り取り装置、耕耘する耕耘装置、肥料を散布する肥料散布装置、農薬を散布する農薬散布装置、収穫を行う収穫装置、牧草等の刈取を行う掘り取り装置、牧草等の拡散を行う拡散装置、牧草等の集草を行う集草装置、牧草等の成形を行う成形装置等である。本実施形態においては、作業装置2は、圃場で対地作業(耕耘作業)を行う対地作業装置30であり、特にロータリ耕耘装置31及び牽引式耕耘装置41である。対地作業装置30は、圃場に対して対地作業を行う作業部33,42を有しており、作業部33,42は、外部から入力された動力によって駆動し、又は車体3によって牽引されることで、掘削等の対地作業を行う。なお、図12Aでは、作業装置2としてロータリ耕耘装置31を昇降装置8に連結した例を示し、図12Bでは、作業装置2として牽引式耕耘装置41を昇降装置8に連結した例を示している。ロータリ耕耘装置31は、出力軸6から伝達された動力によって駆動して対地作業を行う作業装置2であり、牽引式耕耘装置41は、車体3に牽引されることで対地作業を行うサブソイラや、プラウ、カルチベータである。
図1に示すように、作業機1は、操舵装置11を備えている。操舵装置11は、ハンドル(ステアリングホイール)11aと、ハンドル11aの回転に伴って回転する回転軸(操舵軸)11bと、ハンドル11aの操舵を補助する補助機構(パワーステアリング機構)11cと、を有している。補助機構11cは、油圧ポンプ12と、油圧ポンプ12から吐出した作動油が供給される制御弁13と、制御弁13により作動するステアリングシリンダ14とを含んでいる。制御弁13は、制御信号に基づいて作動する電磁弁である。制御弁13は、例えば、スプール等の移動によって切り換え可能な3位置切換弁である。また、制御弁13は、操舵軸11bの操舵によっても切換可能である。ステアリングシリンダ14は、前輪7Fの向きを変えるアーム(ナックルアーム)15に接続されている。
したがって、ハンドル11aを操作すれば、当該ハンドル11aに応じて制御弁13の切換位置及び開度が切り換わり、当該制御弁13の切換位置及び開度に応じてステアリングシリンダ14が左又は右に伸縮することによって、前輪7Fの操舵方向を変更することができる。なお、上述した操舵装置11は一例であり、上述した構成に限定されない。
図1に示すように、作業機1は、制動装置25を備えている。制動装置25は、左制動装置25aと、右制動装置25bとを有している。左制動装置25a及び右制動装置25
bは、ディスク型の制動装置25であり、制動する制動状態と、制動を解除する解除状態に切換可能である。左制動装置25aは、後車軸21Rの左側に設けられ、右制動装置25bは、後車軸21Rの右側に設けられている。例えば、運転席10の近傍には、左ブレーキペダルと、右ブレーキペダルとが設けられている。作業機1を操作するオペレータが左ブレーキペダルを操作する(踏み込む)ことによって、左ブレーキペダルに連結された左連結部材26aが制動方向へ動き、左制動装置25aを制動状態にすることができる。オペレータが右ブレーキペダルを操作する(踏み込む)ことによって、右ブレーキペダルに連結された右連結部材26bが制動方向へ動き、右制動装置25bを制動状態にすることができる。
また、左連結部材26aには、作動油により作動する左油圧作動部27aが連結されている。左油圧作動部27aには、油路を介して第1作動弁(左制動弁)28aが接続されている。第1作動弁28aによって、左油圧作動部27aを作動させることにより、左連結部材26aを制動方向に移動させることができる。また、右連結部材26bには、作動油により作動する右油圧作動部27bが連結されている。右油圧作動部27bには、油路を介して第2作動弁(右制動弁)28bが接続されている。第2作動弁28bによって、右油圧作動部27bを作動させることにより、右連結部材26bを制動方向に移動させることができる。
以上のように、左制動装置25a及び右制動装置25bは、左ブレーキペダル及び右ブレーキペダルの操作だけでなく、左油圧作動部27a及び右油圧作動部27bの作動によっても、左の後輪7R及び右の後輪7Rのそれぞれを独立して制動状態にすることができる。なお、本実施形態において、左制動装置25aは、後車軸21Rの左側に設けられ、右制動装置25bは、後車軸21Rの右側に設けられ、制動装置25は、車輪7F,7Rのうち後輪7Rの制動を行うが、制動装置25は、左制動装置25a及び右制動装置25bに代えて、或いは加えて前車軸21Fの左側及び右側に設けられ、前輪7Fの制動を行ってもよい。
対地作業装置30のうち、ロータリ耕耘装置31を例に説明すると、対地作業装置30は、連結構造20等の装着構造を介して、或いは直接昇降装置8に着脱自在に連結される。図12に示すように、対地作業装置30は、機枠32と、作業部(対地作業部)33と、耕耘カバー34と、を備えている。機枠32は、作業機1の昇降装置8と連結される部分である。作業部33は、対地作業を行う部分であり、本実施形態においては耕耘作業を行う。作業部33は、爪軸33aと、耕耘爪33bを有している。爪軸33aは、ロータリ耕耘装置31に設けられた伝動機構35によって出力軸6から動力を伝達される。耕耘爪33bは、爪軸33aに取り付けられており、当該爪軸33aの軸心廻りに回転して、耕起と砕土を行う。耕耘爪33bは、車体3が前進する際の車輪7F,7Rの回転方向と同一の回転方向、即ち左側方視で反時計回りに回転する。耕耘爪33bは、爪軸33aの車体幅方向の一方側(左側)から他方側(右側)に亘って配置されており、爪軸33aの軸心から径外方に延びている。
図12Aに示すように、耕耘カバー34は、作業部33を覆うカバーである。耕耘カバー34は、作業部33の上方側、後方側、及び作業部33の車体幅方向の両側の後部側を覆い、下端側には、整地カバーが着脱可能に取り付けられている。耕耘カバー34は、車体幅方向に延びる枢支軸廻りに回動自在に枢支されている。具体的には、耕耘カバー34の上端側は、伝動機構35に固定された側板に枢支されており、鉛直方向に揺動可能である。耕耘カバー34は、対地作業装置30に設けられた弾下装置36によって下方に付勢される。
また、牽引式耕耘装置41について、プラウを例に説明すると、プラウの作業部42は、基端部から下方に延びる耕耘爪42aを有し、作業機1に牽引されることで鋤き起こし作業を行なう。プラウは作業機1に牽引されると、耕耘爪42aが圃場に進入して土を反転し、圃場を鋤き起こす。
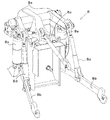
昇降装置8について詳しく説明すると、図2に示すように、昇降装置8は、リフトアーム8a、ロアリンク8b、トップリンク8c、リフトロッド8d、リフトシリンダ8eを
有しており、図3に示すように、対地作業装置30を昇降させ、対地作業装置30が接地していない非作業姿勢と、対地作業装置30が接地し作業を行う作業姿勢と、に切り換え可能である。リフトアーム8aの前端部は、変速装置5を収容するケース(ミッションケース)の後上部に上方又は下方に揺動可能に支持されている。リフトアーム8aは、リフトシリンダ8eの駆動によって揺動(昇降)する。リフトシリンダ8eは、油圧シリンダから構成されている。リフトシリンダ8eは、制御弁16を介して油圧ポンプ12と接続されている。制御弁16は、電磁弁等であって、リフトシリンダ8eを伸縮させる。
図2、図3に示すように、ロアリンク8bの前端部は、変速装置5の後下部に上方又は下方に揺動可能に支持されている。トップリンク8cの前端部は、ロアリンク8bよりも上方において、変速装置5の後部に上方又は下方に揺動可能に支持されている。リフトロッド8dは、リフトアーム8aとロアリンク8bとを連結している。ロアリンク8bの後部及びトップリンク8cの後部には、作業装置2が連結される。図3に示すように、リフトシリンダ8eが駆動(伸縮)すると、リフトアーム8aが昇降するとともに、リフトロッド8dを介してリフトアーム8aと連結されたロアリンク8bが昇降する。これにより、昇降装置8は、非作業姿勢と作業姿勢とに切り換え可能であり、作業装置2がロアリンク8bの前部を支点として、上方又は下方に揺動(昇降)する。
作業機1は、予め設定された走行予定ルートLに基づいて、自動走行を行い、且つ昇降装置8を昇降させ、作業を行うことができる。
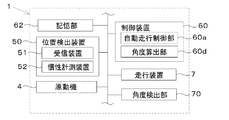
図1に示すように、作業機1は、位置検出装置50を備えている。位置検出装置50は、車体3の位置を検出する装置である。本実施形態において、位置検出装置50は、例えば測位装置である。位置検出装置50は、D−GPS、GPS、GLONASS、北斗、ガリレオ、みちびき等の衛星測位システム(測位衛星)により、自己の位置(緯度、経度を含む測位情報)を検出可能である。即ち、位置検出装置50は、測位衛星から送信された衛星信号(測位衛星の位置、送信時刻、補正情報等)を受信し、衛星信号に基づいて、作業機1の位置(例えば、緯度、経度)、即ち、車体位置W1を検出する。図1に示すように、位置検出装置50は、受信装置51と、慣性計測装置(IMU:Inertial Measurement Unit)52とを有している。受信装置51は、アンテナ等を有していて測位衛星から送信された衛星信号を受信する装置であり、慣性計測装置52とは別に車体3に取付けられている。この実施形態では、受信装置51は、車体3に設けられたロプスの上部に取り付けられている。なお、受信装置51の取り付け位置は、上記位置に限定されず、ボンネットの中央部であってもよく、車体3にキャビン等の保護機構が設けられている場合、保護機構の上部であってもよい。
慣性計測装置52は、車体3の加速度αを検出する加速度センサ、車体3の角速度を検出するジャイロセンサ等を有している。車体3、例えば、運転席10の下方に設けられ、慣性計測装置52によって、車体3のロール角、ピッチ角θ2、ヨー角等を検出することができる。
なお、本実施形態において、位置検出装置50は、衛星信号に基づいて車体3の位置を検出する位置検出装置50であるが、位置検出装置50は、車体3の位置を検出することができればよく、慣性計測装置52が検出した加速度αと所定の位置情報に基づいて車体3の位置を検出するようなものでもよく、上記構成に限定されない。
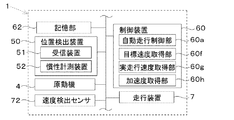
図1に示すように、作業機1は、制御装置60と記憶部62とを備えている。制御装置60は、作業機1における走行系の制御、作業系の制御等を行う装置である。記憶部62は、不揮発性のメモリ等であり、制御装置60の制御に関する様々な情報を記憶している。
図1に示すように、操舵装置11は、自動操舵装置17を有している。自動操舵装置17は、車体3の自動操舵を行う機構であって、走行予定ルートLと、位置検出装置50で検出された車体3の位置(走行位置)と、に基づいて車体3を自動操舵する。自動操舵装置17は、ステアリングモータ17aとギア機構17bとを備えている。ステアリングモータ17aは、走行位置に基づいて、回転方向、回転速度、回転角度等が制御可能なモータである。ギア機構17bは、操舵軸11bに設けられ且つ当該操舵軸11bと供回りす
るギアと、ステアリングモータ17aの回転軸に設けられ且つ当該回転軸と供回りするギアとを含んでいる。ステアリングモータ17aの回転軸が回転すると、ギア機構17bを介して、操舵軸11bが自動的に回転(回動)し、走行位置が走行予定ルートRに一致するように、前輪7Fの操舵方向を変更することができる。
図1に示すように、制御装置60は、作業機1の自動走行を制御する自動走行制御部60aを有している。自動走行制御部60aは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。自動走行制御部60aは、変速装置5の変速段、原動機4の回転数、制動装置25の制動制御、及び昇降装置8の昇降制御を行うことができ、位置検出装置50が検出した車体3の位置と走行予定ルートLとに基づいて車体3の自動走行、及び対地作業装置30による作業を制御する。具体的には、例えば自動走行制御部60aは、左ブレーキペダル及び右ブレーキペダルの操作とは別に制動装置25の制御を行う。自動走行制御部60aは、第1作動弁28aを制御し、左油圧作動部27aを作動させることにより、左連結部材26aを制動方向に移動させる。一方、自動走行制御部60aは、第2作動弁28bを制御し、右油圧作動部27bを作動させることにより、右連結部材26bを制動方向に移動させる。
自動走行制御部60aは、自動走行を開始すると、車体3が走行予定ルートLに沿って走行するようにステアリングモータ17aを制御する。自動走行制御部60aは、自動走行を開始すると、変速装置5の変速段、原動機4の回転数、制動装置25の制動制御等を自動的に変更することによって、作業機1の車速(走行速度)を制御する。また、自動走行制御部60aは、昇降装置8の制御を行い、走行予定ルートLに応じて作業装置2を昇降させる。
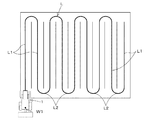
図4Aは、作業機1の走行予定ルートLの一例を示している。走行予定ルートLには、作業機1を直進させる直進部L1と、作業機1を旋回させる旋回部L2とが含まれている。自動走行制御部60aは、自動走行を開始すると、直進部L1と旋回部L2とでそれぞれ異なる走行速度を制御する。例えば、直進部L1では、自動走行制御部60aは、走行速度を速度v1に設定する。一方、旋回部L2では、自動走行制御部60aは、走行速度を速度v1よりも遅い速度v2(v2>v1)に設定する。なお、自動走行制御部60aは、直進部L1を複数の区間に分けて、当該区間ごとに異なる走行速度に設定してもよく、走行速度の制御は上記構成に限定されない。
また、自動走行制御部60aは、自動走行を開始すると、直進部L1では昇降装置8を制御して作業装置2を下降させて作業姿勢に切り換え、旋回部L2では昇降装置8を制御して作業装置2を上昇させて非作業姿勢に切り換える。なお、自動走行制御部60aは、走行予定ルートLに応じて昇降装置8を制御すればよく、作業装置2を上昇させる位置、及び下降させる位置は、上記位置に限定されない。
図4Bに示すように、作業機1が自動走行を行っている状況下において、車体位置W1と走行予定ルートLとの偏差が閾値未満である場合、自動走行制御部60aは、操舵軸(回転軸)11bの回転角を維持する。車体位置W1と走行予定ルートLとの偏差が閾値以上であって、作業機1が走行予定ルートLに対して左側に位置している場合は、自動走行制御部60aは、作業機1の操舵方向が右方向となるように操舵軸11bを回転する。車体位置W1と走行予定ルートLとの偏差が閾値以上であって、作業機1が走行予定ルートLに対して右側に位置している場合は、自動走行制御部60aは、作業機1の操舵方向が左方向となるように操舵軸11bを回転する。なお、上述した実施形態では、車体位置W1と走行予定ルートLとの偏差に基づいて操舵装置11の操舵角を変更していたが、走行予定ルートLの方位と作業機1(車体3)の進行方向(走行方向)の方位(車体方位)F1とが異なる場合、即ち、走行予定ルートLに対する車体方位F1の角度θgが閾値以上である場合、自動走行制御部60aは、角度θgが零(車体方位F1が走行予定ルートLの方位に一致)するように操舵角を設定してもよい。また、自動走行制御部60aは、偏差(位置偏差)に基づいて求めた操舵角と、方位(方位偏差)に基づいて求めた操舵角とに基づいて、自動操舵における最終の操舵角を設定してもよい。上述した実施形態における自動操舵における操舵角の設定は一例であり、限定されない。
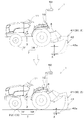
昇降装置8は、対地作業装置30を昇降させ、作業姿勢と非作業姿勢とに切り換えるが、作業姿勢と非作業姿勢との切り換えにおいて、対地作業装置30の作業部33,42が接地する際に、作業部33,42の対地作業に対する抵抗(掘削抵抗)や、その抵抗による反力が変動することで、作業機1は、予期せず走行速度が増速して車体3が前方に飛び出す現象(以下増速現象という)が生じる場合がある。具体的には、図5Aに示すように、昇降装置8にロータリ耕耘装置31が連結されている場合、昇降装置8が下降してロータリ耕耘装置31の耕耘爪33b(作業部33)が圃場に接地することで、回転駆動する耕耘爪33bの掘削抵抗による反力をうけて、ロータリ耕耘装置31が昇降装置8を介して車体3を前方に押し出す。
一方、図5Bに示すように、昇降装置8に牽引式耕耘装置41が連結されている場合、昇降装置8が上昇して牽引式耕耘装置41の耕耘爪42a(作業部42)が圃場から抜去されることで、耕耘爪42aの掘削抵抗が減少し、車体3が前方に飛び出す。また、昇降装置8が上昇し、耕耘爪42aを圃場から抜去することで、当該抜去の動作に対する抵抗により後輪7R側の荷重f2が増加する。これにより、駆動輪である後輪7Rにトラクションがかかることで、車体3が前方に飛び出す。
自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を昇降させながら、制動装置25を制動させることで増速現象を抑制する。自動走行制御部60aは、少なくとも昇降装置8にロータリ耕耘装置31が連結されている場合、昇降装置8が対地作業装置30を下降させ、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。一方、自動走行制御部60aは、少なくとも昇降装置8に牽引式耕耘装置41が連結されている場合、昇降装置8が対地作業装置30を上昇させ、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。
自動走行制御部60aは、所定の条件に基づいて、増速現象を事前に検出し、車体3を走行させ且つ昇降装置8に対地作業装置30を昇降させながら、制動装置25を制動させる。具体的には、自動走行制御部60aは、圃場に対する作業部33,42の上下位置(耕深X、図5A及び図5B参照)を検出し、当該耕深Xに基づいて増速現象が生じることを事前に検出して、制動装置25を制動させる。図1に示すように、作業機1は、耕深検出部63を備えている。耕深検出部63は、作業部33,42の耕深Xを検出可能である。耕耘検出部は、例えば距離センサ63aと傾斜センサ63bとを有している。距離センサ63aは、当該距離センサ63aから圃場までの距離を測定するセンサである。距離センサ63aは、例えば、レーザセンサによって構成される。距離センサ63aは、レーザ照射部を有し、レーザ照射部から照射されて圃場で反射したレーザ光を受光することでレーザ照射部から圃場までの距離を測定する。なお、距離センサ63aは、圃場までの距離を検出することができればよく、レーザセンサに限定されない。傾斜センサ63bは、対地作業装置30の傾きを検出するセンサであって、対地作業装置30の水平(地面)に対する傾斜角度を計測する。
図1に示すように、制御装置60は、距離センサ63aで測定した距離と傾斜センサ63bで検出した傾斜角度とに基づいて耕深Xを算出する耕深算出部60bを有する。耕深算出部60bは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。距離センサ63a及び傾斜センサ63bは、制御装置60(耕深算出部60b)と接続されており、耕深算出部60bは、距離センサ63aで測定した距離及び傾斜センサ63bで検出した傾斜角度を取得する。耕深算出部60bは、距離センサ63aで測定した距離、傾斜センサ63bで検出した傾斜角度、及び所定の計算式に基づいて、作業部33,42の圃場に対する上下位置を算出する。なお、耕深算出部60bは、作業部33,42の圃場に対する上下位置を算出することができればよく、作業部33,42の前方に設けられ且つ対地作業部33,42から対地作業前の圃場までの距離を検出する距離センサ63aと、作業部33,42の後方に設けられ且つ対地作業部33,42から対地作業後の圃場までの距離を検出する距離センサ63aとを用いて、作業部33,42の圃場に対する上下位置を算出するような構成であってもよいし、その構
成は上記構成に限定されない。
図1に示すように、制御装置60は、昇降装置8に連結された対地作業装置30がロータリ耕耘装置31と牽引式耕耘装置41とのいずれか一方であるか取得する装置取得部60cを有している。装置取得部60cは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。装置取得部60cは、自動又は作業者の手動によって入力された対地作業装置30の種別(ロータリ耕耘装置31と牽引式耕耘装置41とのいずれか)に関する情報に基づいて、昇降装置8に連結された対地作業装置30の種別を取得する。
例えば、作業者の手動によらず自動で制御装置60に対地作業装置30の種別が入力される場合について説明すると、作業機1は、通信装置65と取得装置66とを備えている。通信装置65は、無線タグ、即ち、RFIDタグ(Radio Frequency Identification)である。通信装置65には、対地作業装置30の情報として、対地作業装置30の種別が記憶されている。取得装置66は、電気、電子部品、プログラム等で構成されている。詳しくは、取得装置66は、通信装置65の対地作業装置30の種別を受信する無線タグリーダ、即ち、RFIDリーダである。つまり、装置取得部60cは、取得装置66が取得した対地作業装置30の種別に関する情報に基づいて、昇降装置8に連結された対地作業装置30の種別を取得する。
一方、作業者が手動で対地作業装置30の種別を選択する場合について説明すると、例えば、作業機1は、選択操作可能な切換装置67や操作可能な表示装置68を備えている。作業者は、当該切換装置67や表示装置68を操作することによって、昇降装置8に連結された対地作業装置30の種別を選択操作する。切換装置67や表示装置68は、制御装置60(装置取得部60c)と接続されており、装置取得部60cは、切換装置67や表示装置68の操作情報に基づいて対地作業装置30の種別を取得する。
なお、上述した実施形態において、装置取得部60cは、対地作業装置30の種別を取得するが、装置取得部60cは、少なくとも対地作業装置30の種別を取得すればよく、対地作業装置30の種別よりも詳細な分類、即ち対地作業装置30の種類や機種を取得してもよい。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図6に示すように、作業機1の原動機4の始動後、装置取得部60cは、昇降装置8に連結されている対地作業装置30の種別を取得する(S1)。装置取得部60cが対地作業装置30の種別を取得すると、制御装置60は、作業機1の自動走行の開始指示を取得しているか判断する(S2)。
制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S2,Yes)、自動走行制御部60aが作業機1の自動走行を開始する(S3)。制御装置60は、例えば、作業機1と通信可能に接続されたパーソナルコンピュータ(PC)、スマートフォン(多機能携帯電話)、タブレット等のコンピュータ等の携帯端末から自動走行の開始指示を取得する。なお、制御装置60は、所定時刻になると開始指示を取得して自動走行を開始してもよく、開始指示の取得元は上記構成に限定されない。自動走行制御部60aは、自動走行を開始すると、車体3が走行予定ルートLに沿って走行するように操舵装置11の制御弁13を制御する。また、自動走行制御部60aは、自動走行を開始すると、変速装置5の変速段、原動機4の回転数、制動装置25の制動制御等を自動的に変更することによって、作業機1(車体3)の車速(走行速度)を制御する。また、自動走行制御部60aは、昇降装置8の制御を行い、走行予定ルートLに基づいて、昇降装置8を昇降させて作業姿勢、及び非作業姿勢のいずれかの姿勢に切り換える。
自動走行制御部60aが自動走行を開始すると、自動走行制御部60aは、装置取得部60cが取得した対地作業装置30の種別がロータリ耕耘装置31であるか判断する(S4)。自動走行制御部60aが、対地作業装置30の種別がロータリ耕耘装置31であると判断し(S4,Yes)、且つ走行予定ルートLに基づいて昇降装置8を非作業姿勢から作業姿勢に切り換える場合(S5,Yes)、耕深検出部63が耕深Xを検出する(S
6)。耕深検出部63が耕深Xを検出すると(S6)、自動走行制御部60aは、当該耕深Xに応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、耕深検出部63が耕深Xを検出すると(S6)、自動走行制御部60aは、耕深検出部63が検出した耕深Xが予め設定された第1閾値M1以上(耕深X≧第1閾値M1)であるか判断する(S7)。自動走行制御部60aは、耕深Xが第1閾値M1未満(耕深X<第1閾値M1)である場合(S7,No)、即ち作業部33,42の圃場に対する上下位置が所定位置(第1閾値M1)に達するまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S8)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。
一方、自動走行制御部60aが対地作業装置30の種別は牽引式耕耘装置41であると判断し(S4,No)、且つ走行予定ルートLに基づいて昇降装置8を作業姿勢から非作業姿勢に切り換える場合(S9,Yes)、耕深検出部63が作業部33,42の耕深Xを検出する(S10)。耕深検出部63が作業部33,42の耕深Xを検出すると(S10)、自動走行制御部60aは、当該作業部33,42の耕深Xに応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、自動走行制御部60aは、昇降装置8を作業姿勢から非作業姿勢に切り換える場合(S9,Yes)、耕深検出部63が検出した作業部33,42の耕深Xが予め設定された第2閾値M2以下(耕深X≦第2閾値M2)であるか判断する(S11)。自動走行制御部60aは、作業部33,42の耕深Xが第2閾値M2(耕深X>第2閾値M2)を超過している場合(S10,No)、即ち作業部33,42の圃場に対する上下位置が所定位置に達するまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S8)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を上昇させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。
なお、上述した実施形態において自動走行制御部60aは、昇降装置8に連結された対地作業装置30がロータリ耕耘装置31であるか及び牽引式耕耘装置41であるかに関わらず、制動装置25の制動制御を行って増速現象を抑制するが、自動走行制御部60aは、昇降装置8に連結された対地作業装置30がロータリ耕耘装置31である場合と、牽引式耕耘装置41である場合とのいずれか一方の場合で増速現象を抑制することができてもよく、その構成は上述した実施形態に限定されない。例えば、自動走行制御部60aは、ロータリ耕耘装置31の耕耘カバー34の上下方向の揺動角度θ1(図5A参照)に基づいて増速現象を事前に検出し、制動装置25の制動制御を行うような構成であってもよい。なお、以下の説明において揺動角度θ1は、耕耘カバー34の揺動の支点を通る垂線と、当該支点と耕耘カバー34の下端とを結ぶ直線と、が形成する角度である。
図7Aに示すように、作業機1は、耕耘カバー34の揺動角度θ1を検出する角度検出部70を備えている。角度検出部70は、ポテンショメータ等のセンサであり、例えば耕耘カバー34の上端(揺動支点の近傍)等に取り付けられることによって、耕耘カバー34の実際の揺動角度θ1を信号として検出する。角度検出部70は、無線又は有線によって制御装置60と通信可能に接続されている。
図7Aに示すように、制御装置60は、角度算出部60dを有する。角度算出部60dは、角度検出部70が出力した信号に基づいて、耕耘カバー34の実際の揺動角度θ1を算出する。角度算出部60dは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。耕耘カバー34の下端部は圃場に接地するため、制御装置60は、角度算出部60dが算出した耕耘カバー34の揺動角度θ1に基づいて、対地作業装置30の耕深X、即ち作業部33の圃場に対する上下位置を検出することができる。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図7Bに示すように、作業機1の原動機4の始動後、制御装置60が作業機1の自動走行の開始指示を取得しているか判断する(S20)。制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S20,Yes)、自動走行制御部60aは、作業機1の自動走行を開始する(S21)。
自動走行制御部60aは、自動走行を開始すると、走行予定ルートLに基づいて昇降装置8を非作業姿勢から作業姿勢に切り換える場合(S22,Yes)、角度算出部60dは、角度算出部60dが検出信号に基づいて耕耘カバー34の揺動角度θ1を算出する(S23)。自動走行制御部60aは、当該揺動角度θ1に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、角度算出部60dが耕耘カバー34の揺動角度θ1を算出すると(S23)、自動走行制御部60aは、角度算出部60dが算出した揺動角度θ1が予め設定された第3閾値M3以上(θ1≧第3閾値M3)であるか判断する(S24)。自動走行制御部60aは、揺動角度θ1が第3閾値M3未満(θ1<第3閾値M3)である場合(S24,No)、揺動角度θ1が第3閾値M3以上になるまでの間、即ち作業部33,42の圃場に対する上下位置が所定位置に達するまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S25)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。
また、上述した実施形態において自動走行制御部60aは、耕耘カバー34の揺動角度θ1に応じて、制動装置25の制動制御を行い、増速現象を抑制するが、自動走行制御部60aは、増速現象を抑制できればよく、制動装置25の制動制御の条件は、上記条件に限定されない。例えば、自動走行制御部60aは、昇降装置8に設けられ、且つ車体3及び/又は対地作業装置30から昇降装置8に付与される負荷f1の変化量に基づいて増速現象を事前に検出し、制動装置25の制動制御を行うような構成であってもよい。
図8Aに示すように、作業機1は、車体3及び/又は対地作業装置30から昇降装置8に付与される負荷f1を検出する負荷検出部71を備えている。詳しくは、負荷検出部71は、対地作業装置30から車体側に向かって当該車体3に付与される負荷f1、言い換えると、対地作業装置30が車体3を押し出す際の負荷f1を検出する。また、負荷検出部71は、対地作業装置30が対地作業の抵抗により、対地作業装置30から車体3の反対側に向かって当該車体3に付与される負荷f1、言い換えると、前進する車体3に対して、後進に付与する負荷f1、即ち対地作業装置30が車体3の進行を妨げる負荷f1を検出する。
負荷検出部71は、例えば昇降装置8に設けられた歪ゲージ(ストレインゲージ)である。歪ゲージは、昇降装置8のリフトアーム8a、ロアリンク8b、及びトップリンク8c等の伸長方向に沿って設けられており、車体3及び/又は対地作業装置30から昇降装置8に付与された負荷f1によるリフトアーム8a、ロアリンク8b、及びトップリンク8c等の変形を検出する。歪ゲージは、制御装置60を接続されており、歪ゲージ(負荷検出部71)が検出した車体3及び/又は対地作業装置30から昇降装置8に付与される負荷f1は、信号として制御装置60に入力される。
例えば、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30が車体3を押し出す際、リフトアーム8a、ロアリンク8b、及びトップリンク8c等は、収縮方向に変形する。歪ゲージは、リフトアーム8a、ロアリンク8b、及びトップリンク8c等の変形に伴って、収縮方向に変形することで電気抵抗が減少する。
一方、非作業姿勢から作業姿勢への切り換えにおいて、対地作業の抵抗により対地作業装置30が車体3の進行を妨げる際、リフトアーム8a、ロアリンク8b、及びトップリンク8c等は、伸長方向に変形する。リフトアーム8a、ロアリンク8b、及びトップリンク8c等の変形に伴って、歪ゲージは、伸長方向に変形することで電気抵抗が増加する
。
図8Aに示すように、制御装置60は、負荷算出部60eを有する。負荷算出部60eは、負荷検出部71が出力した信号に基づいて、昇降装置8に付与された負荷f1を算出する。負荷算出部60eは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。負荷算出部60eは、負荷検出部71が出力した信号、即ち歪ゲージの電気抵抗と、所定の演算式に基づいて車体3及び/又は対地作業装置30から昇降装置8に付与される負荷f1を算出する。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図8Bに示すように、作業機1の原動機4の始動後、装置取得部60cは、昇降装置8に連結されている対地作業装置30の種別を取得する(S30)。装置取得部60cが対地作業装置30の種別を取得すると、制御装置60が作業機1の自動走行の開始指示を取得しているか判断する(S31)。
制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S31,Yes)、自動走行制御部60aは、作業機1の自動走行を開始する(S32)。
自動走行制御部60aが自動走行を開始すると、自動走行制御部60aは、装置取得部60cが取得した対地作業装置30の種別がロータリ耕耘装置31であるか判断する(S33)。自動走行制御部60aが、対地作業装置30の種別がロータリ耕耘装置31であると判断し(S33,Yes)、且つ走行予定ルートLに基づいて昇降装置8を非作業姿勢から作業姿勢に切り換える場合(S34,Yes)、負荷算出部60eが負荷検出部71の検出した信号に基づいて、昇降装置8へ付与された負荷f1を算出する(S35)。負荷算出部60eが上記負荷f1を算出すると(S35)、自動走行制御部60aは、当該負荷f1の所定時間あたりの変化量Δfに応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、負荷算出部60eが負荷検出部71の検出した信号(電気抵抗)に基づいて負荷f1を算出すると(S35)、自動走行制御部60aは、変化量Δfが予め設定された負の値である第4閾値M4以上(Δf≧第4閾値M4)であるか判断する(S36)。自動走行制御部60aは、負荷f1の変化量Δfが第4閾値M4未満(Δf<第4閾値M4)である場合(S36,No)、即ち作業部33,42の圃場に対する上下位置が所定位置に達するまでの間であって、対地作業装置30が車体3を前方に押し出す場合、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S37)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。
一方、自動走行制御部60aが対地作業装置30の種別は牽引式耕耘装置41であると判断し(S33,No)、且つ走行予定ルートLに基づいて昇降装置8を作業姿勢から非作業姿勢に切り換える場合(S38,Yes)、負荷算出部60eは、負荷検出部71の検出した信号に基づいて、負荷f1を算出する(S39)。負荷算出部60eが負荷f1を算出すると(S39)、自動走行制御部60aは、負荷f1の変化量Δfに応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、負荷算出部60eが負荷検出部71の検出した信号(電気抵抗)に基づいて、昇降装置8へ付与された負荷f1を算出すると(S39)、自動走行制御部60aは、変化量Δfが予め設定された正の値である第5閾値M5以下(Δf≦第5閾値M5)であるか判断する(S40)。自動走行制御部60aは、負荷f1の変化量Δfが第5閾値M5を超過(Δf>第5閾値M5)している場合(S40,No)、即ち作業部33,42の圃場に対する上下位置が所定位置に達するまでの間であって、対地作業の抵抗により対地作業装置30が車体3の進行を妨げる場合、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S37)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を上昇させながら、対地作業装置30の
作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。
また、上述した実施形態において自動走行制御部60aは、車体3及び/又は対地作業装置30から昇降装置8に付与される負荷f1に基づいて増速現象を検出し、制動装置25の制動制御を行い、増速現象を抑制するが、自動走行制御部60aは、他の条件に基づいて増速現象を事前に検出してもよい。例えば、自動走行制御部60aは、車体3の走行速度の加速度αに基づいて増速現象を事前に検出し、制動装置25の制動制御を行うような構成であってもよい。
自動走行制御部60aは、例えば作業機1に設けられた慣性計測装置52が検出した加速度αに基づいて増速現象を検出する。具体的には、自動走行制御部60aは、走行予定ルートLに対応付けられた走行速度(目標速度V1)と実際の走行速度(実走行速度V2)とを比較し、実走行速度V2が目標速度V1以上(V2≧V2)である場合に加速度αが正(α>0)である場合(実走行速度V2が目標速度V1を超過しているにも関わらず、走行速度増速している場合)や、加速度αと予め設定された加速度α(第6閾値M6)と比較して、当該加速度αが第6閾値M6を超過(α>第6閾値M6)している場合に増速現象を検出する。
図9Aに示すように、制御装置60は、目標速度取得部60fと、実走行速度取得部60gと、加速度取得部60hと、を有している。目標速度取得部60f、実走行速度取得部60g、及び加速度取得部60hは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。
目標速度取得部60fは、記憶部62に記憶され且つ走行予定ルートLと対応付けられた目標速度V1を取得する。実走行速度取得部60gは、車体3に設けられ当該車体3の走行速度を検出する速度検出センサ72から出力された信号に基づいて実走行速度V2を取得する。なお、実走行速度取得部60gは、車体3の実走行速度V2を取得できればよく、位置検出装置50が検出した車体3の位置情報と経過時間に基づいて車体3の実走行速度V2を取得するようなものであってもよく、その方法は上記方法に限定されない。
加速度取得部60hは、慣性計測装置52から出力された信号に基づいて加速度αを取得する。なお、加速度取得部60hは、車体3の加速度αを取得することができればよく実走行速度取得部60gが取得した車体3の実走行速度V2と経過時間とに基づいて車体3の加速度αを取得するようなものであってもよい。
例えば、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30の作業部33の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間に、対地作業装置30が車体3を押し出す際、車体3を対地作業装置30が押し出すため、実走行速度V2が目標速度V1よりも増速したり、車体3の加速度αが比較的大きくなる。
一方、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30の作業部42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間に、対地作業の抵抗により対地作業装置30が車体3の進行を妨げる際、当該抵抗が減少し、且つ後輪7R側のトラクションが増加することで、実走行速度V2が目標速度V1よりも増速したり、車体3の加速度αが比較的大きくなる。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図9Bに示すように、作業機1の原動機4の始動後、制御装置60が作業機1の自動走行の開始指示を取得しているか判断する(S50)。
制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S50,Yes)、自動走行制御部60aは、作業機1の自動走行を開始する(S51)。
自動走行制御部60aが自動走行を開始すると、当該自動走行制御部60aは、昇降装置8の姿勢を確認し、走行予定ルートLに基づいて昇降装置8の姿勢(作業姿勢及び非作業姿勢)を切り換える場合(S52,Yes)、当該自動走行制御部60aは、目標速度取得部60fが取得した目標速度V1と実走行速度取得部60gが取得した実走行速度V
2とを比較し(S53)、目標速度V1と実走行速度V2に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、自動走行制御部60aが目標速度V1と実走行速度V2とを比較し(S53)、実走行速度V2が目標速度V1以上(V2≧V1)である場合(S53,Yes)、自動走行制御部60aは、加速度取得部60hが取得した加速度αが正(α>0)、即ち走行速度が増速しているか判断する(S54)。自動走行制御部60aは、加速度αが正(α>0)である場合(S54,Yes)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、加速度αが0以下(α≦0)になるまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S55)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を昇降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢、又は作業姿勢から非作業姿勢に安定するまでの間に増速現象が生じると、制動装置25を制動させる。
一方、自動走行制御部60aが目標速度V1と実走行速度V2とを比較し(S53)、実走行速度V2が目標速度V1未満(V2<V1)である場合(S53,No)、自動走行制御部60aは、加速度取得部60hが取得した加速度αが予め設定された第6閾値M6を超過(α>第6閾値M6)しているか判断する(S56)。動走行制御部は、加速度αが第6閾値M6を超過(α>第6閾値M6)している場合(S56,Yes)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、加速度αが第6閾値M6以下(α≦第6閾値M6)になるまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S55)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢、又は非作業姿勢から作業姿勢に安定するまでの間に増速現象が生じると、制動装置25を制動させる。
また、上述した実施形態において自動走行制御部60aは、車体3の走行速度の加速度αに基づいて増速現象を事前に検出し、制動装置25の制動制御を行い、増速現象を抑制するが、自動走行制御部60aは、他の条件に基づいて増速現象を事前に検出してもよい。例えば、自動走行制御部60aは、車体3のピッチ角に基づいて増速現象を事前に検出し、制動装置25の制動制御を行うような構成であってもよい。
自動走行制御部60aは、例えば作業機1に設けられた慣性計測装置52が検出したピッチ角θ2(図5A、図5B参照)に基づいて増速現象を検出する。以下の説明において、車体3が水平状態である場合を基準(θ2=0)として、車体3が前傾姿勢になる場合、ピッチ角θ2を正(θ2>0、図5Aの下図参照)として、車体3が後傾姿勢になる場合ピッチ角θ2を負(θ2<0、図5Bの下図参照)として説明する。
図10Aに示すように、制御装置60は、ピッチ角取得部60iを有している。ピッチ角取得部60iは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。ピッチ角取得部60iは、慣性計測装置52から出力された信号に基づいてピッチ角θ2を取得する。なお、ピッチ角取得部60iは、車体3のピッチ角θ2を取得することができればよく慣性計測装置52とは別にピッチ角θ2を検出するセンサから出力された信号に基づいてピッチ角θ2を取得するようなものであってもよい。
図5Aに示すように、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間に、対地作業装置30が車体3を押し出す際、車体3が前傾姿勢となる。つまり、対地作業装置30が車体3を押し出すと、車体3のピッチ角θ2は、0を超過するよう増加する。
一方、図5Bに示すように、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間に、対地作業の抵抗により対地作業装置30
が車体3の進行を妨げる際、車体3が後傾姿勢となる。これにより車体3のピッチ角θ2が0未満に減少する。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図10Bに示すように、作業機1の原動機4の始動後、装置取得部60cは、昇降装置8に連結されている対地作業装置30の種別を取得する(S60)。装置取得部60cが対地作業装置30の種別を取得すると、制御装置60は、作業機1の自動走行の開始指示を取得しているか判断する(S61)。
制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S61,Yes)、自動走行制御部60aは、作業機1の自動走行を開始する(S62)。
自動走行制御部60aが自動走行を開始すると、自動走行制御部60aは、装置取得部60cが取得した対地作業装置30の種別がロータリ耕耘装置31であるか判断する(S63)。自動走行制御部60aが、対地作業装置30の種別がロータリ耕耘装置31であると判断し(S63,Yes)、且つ走行予定ルートLに基づいて昇降装置8を非作業姿勢から作業姿勢に切り換える場合(S64,Yes)、ピッチ角取得部60iが慣性計測装置52の検出したピッチ角θ2を取得する(S65)。ピッチ角取得部60iがピッチ角θ2を取得すると(S65)、自動走行制御部60aは、当該ピッチ角θ2に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、ピッチ角取得部60iがピッチ角θ2を取得すると(S65)、自動走行制御部60aは、当該ピッチ角θ2が予め設定された第7閾値M7以上(θ2≧第7閾値M7)であるか判断する(S66)。第7閾値M7は、予め記憶部62に記憶されている値であり、少なくとも正の値(第7閾値M7>0)である。つまり、ピッチ角θ2が第7閾値M7以上である場合、車体3は、前傾姿勢である。自動走行制御部60aは、ピッチ角θ2が第7閾値M7以上(θ2≧第7閾値M7)である場合(S66,Yes)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、ピッチ角θ2が第7閾値M7未満(θ2<第7閾値M7)になるまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S67)。このため、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。
一方、自動走行制御部60aが対地作業装置30の種別は牽引式耕耘装置41であると判断し(S63,No)、且つ走行予定ルートLに基づいて昇降装置8を作業姿勢から非作業姿勢に切り換える場合(S68,Yes)、ピッチ角取得部60iが慣性計測装置52の検出したピッチ角θ2を取得する(S69)。ピッチ角取得部60iがピッチ角θ2を取得すると(S69)、自動走行制御部60aは、当該ピッチ角θ2に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、ピッチ角取得部60iがピッチ角θ2を取得すると(S69)、自動走行制御部60aは、当該ピッチ角θ2が予め設定された第8閾値M8以下(θ2≦第8閾値M8)であるか判断する(S70)。第8閾値M8は、予め記憶部62に記憶されている値であり、少なくとも負の値(第8閾値M8<0)である。つまり、ピッチ角θ2が第8閾値M8以下である場合、車体3は、後傾姿勢である。自動走行制御部60aは、ピッチ角θ2が第8閾値M8以下(θ2≦第8閾値M8)である場合(S70,Yes)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、ピッチ角θ2が第8閾値M8を超過(θ2>第8閾値M8)するまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S67)。このため、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を上昇させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。
また、上述した実施形態において自動走行制御部60aは、車体3の傾斜角度(ピッチ角θ2)に基づいて増速現象を検出し、制動装置25の制動制御を行い、増速現象を抑制
するが、自動走行制御部60aは、他の条件に基づいて増速現象を事前に検出してもよい。例えば、自動走行制御部60aは、車輪7F,7Rに付与される荷重f2に基づいて増速現象を検出し、制動装置25の制動制御を行うような構成であってもよい。
図11Aに示すように、作業機1は、荷重検出部73を備えている。荷重検出部73は、車輪7F,7Rに付与される荷重f2を検出する。荷重検出部73は、車輪7F,7Rを支持する車軸21に取り付けられ、当該車軸21の変形に基づいて車輪7F,7Rに付与される荷重f2を検出する。本実施形態において、荷重検出部73は、車軸21のうち後車軸21Rに取り付けられ、後輪7Rに付与される荷重f2を検出する。
荷重検出部73は、例えば車軸21に取り付けられた歪ゲージ(ストレインゲージ)である。歪ゲージは、車軸21の伸長方向に沿って設けられており、車体3に付与される荷重f2によって生じる車軸21の変形を検出する。歪ゲージは、制御装置60を接続されており、歪ゲージ(負荷検出部71)が検出した車軸21の変形、即ち車輪7F,7Rに付与される荷重f2は、信号として制御装置60に出力する。
図11Aに示すように、制御装置60は、荷重検出部73が出力した信号に基づいて、車輪7F,7Rに付与される荷重f2を算出する荷重算出部60jを有する。荷重算出部60jは、制御装置60に設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。荷重算出部60jは、荷重検出部73が出力した信号、即ち歪ゲージの電気抵抗と、所定の演算式に基づいて車輪7F,7Rに付与される荷重f2を算出する。
例えば、図5Aに示すように、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30が車体3を押し出す際、後輪7Rの荷重f2が減少する。これにより、後車軸21Rの変形量が減少し、後車軸21Rに取り付けられた歪ゲージが収縮方向に変形し、当該歪ゲージの電気抵抗が減少する。
一方、図5Bに示すように、非作業姿勢から作業姿勢への切り換えにおいて、対地作業の抵抗により対地作業装置30が車体3の進行を妨げる際、車体3は後傾姿勢となり、後輪7Rの荷重f2が増加する。これにより、後車軸21Rの変形量が増加し、後車軸21Rに取り付けられた歪ゲージが伸長方向に変形し、当該歪ゲージの電気抵抗が増加する。
なお、上述した実施形態において、荷重検出部73は、後車軸21Rに取り付けられ、後輪7Rに付与される荷重f2を検出するが、荷重検出部73は、前車軸21Fに取り付けられ、前輪7Fに付与される荷重f2を検出するような構成であってもよい。斯かる場合、例えば、非作業姿勢から作業姿勢への切り換えにおいて、対地作業装置30が車体3を押し出す際、車輪7F,7Rのうち前輪7Fの荷重f2が増加する。これにより、前車軸21Fの変形量が増加すると、前車軸21Fに取り付けられた歪ゲージが伸長方向に変形し、当該歪ゲージの電気抵抗が増加する。
一方、非作業姿勢から作業姿勢への切り換えにおいて、対地作業の抵抗により対地作業装置30が車体3の進行を妨げる際、車体3は後傾姿勢となり、前輪7Fの荷重f2が減少する。これにより、前車軸21Fの変形量が減少し、前車軸21Fに取り付けられた歪ゲージが収縮方向に変形し、当該歪ゲージの電気抵抗が減少する。
以下、自動走行制御部60aによる制動装置25の制御の一連の流れについて説明する。
図11Aに示すように、作業機1の原動機4の始動後、装置取得部60cは、昇降装置8に連結されている対地作業装置30の種別を取得する(S70)。装置取得部60cが対地作業装置30の種別を取得すると、制御装置60は、作業機1の自動走行の開始指示を取得しているか判断する(S71)。
制御装置60が作業機1の自動走行の開始指示を取得したと判断すると(S71,Yes)、自動走行制御部60aは、作業機1の自動走行を開始する(S72)。
自動走行制御部60aが自動走行を開始すると、自動走行制御部60aは、装置取得部60cが取得した対地作業装置30の種別がロータリ耕耘装置31であるか判断する(S73)。自動走行制御部60aが、対地作業装置30の種別がロータリ耕耘装置31であると判断し(S73,Yes)、且つ走行予定ルートLに基づいて昇降装置8を非作業姿
勢から作業姿勢に切り換える場合(S74,Yes)、荷重算出部60jが荷重検出部73の検出した信号に基づいて車輪7F,7Rに付与された荷重f2を算出する(S75)。荷重算出部60jが車輪7F,7Rに付与された荷重f2を算出すると(S75)、自動走行制御部60aは、当該車輪7F,7Rに付与された荷重f2に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、荷重算出部60jが車輪7F,7Rに付与された荷重f2を算出すると(S75)、自動走行制御部60aは、当該荷重f2のうち、後輪7Rに付与された荷重f2が予め設定された第9閾値M9以上(F2≧第9閾値M9)であるか判断する(S76)。自動走行制御部60aは、後輪7Rに付与された荷重f2が第9閾値M9未満(F2<第9閾値M9)である場合(S76,No)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、後輪7Rに付与される荷重f2が第9閾値M9以上(F2≧第9閾値M9)になるまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S77)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を下降させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間、制動装置25を制動させる。
一方、自動走行制御部60aが対地作業装置30の種別は牽引式耕耘装置41であると判断し(S73,No)、且つ走行予定ルートLに基づいて昇降装置8を作業姿勢から非作業姿勢に切り換える場合(S78,Yes)、荷重算出部60jが荷重検出部73の検出した信号に基づいて車輪7F,7Rに付与された荷重f2を算出する(S79)。荷重算出部60jが車輪7F,7Rに付与された荷重f2を算出すると(S79)、自動走行制御部60aは、当該車輪7F,7Rに付与された荷重f2に応じて制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する。
具体的には、荷重算出部60jが車輪7F,7Rに付与された荷重f2を算出すると(S79)、自動走行制御部60aは、当該荷重f2のうち、後輪7Rに付与された荷重f2が予め設定された第10閾値M10以下(F2≦第10閾値M10)であるか判断する(S80)。自動走行制御部60aは、後輪7Rに付与された荷重f2が第10閾値M10を超過している場合(S80,No)、即ち作業部33,42の圃場に対する上下位置が所定位置に達し、後輪7Rに付与された荷重f2が第10閾値M10以下(F2≦第10閾値M10)になるまでの間、制動装置25を制動状態に切り換え制御して作業機1の走行速度を減速する(S77)。つまり、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を上昇させながら、対地作業装置30の作業部33,42の圃場に対する上下位置が所定位置に達して、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。
なお、上述した実施形態において自動走行制御部60aによる制動装置25の制動制御の条件は、それぞれ個別に説明したが、自動走行制御部60aは、増速現象を事前に検知、又は増速現象の発生を検知して、制動装置25の制動制御を行えばよく、その条件は、任意に組み合わせてもよい。
上述した作業機1は、走行する走行装置7と、走行装置7の制動を行う制動装置25と、を有する車体3と、車体3に対地作業装置30を昇降可能に連結する昇降装置8と、車体3の位置を検出する位置検出装置50と、位置検出装置50が検出した車体3の位置と走行予定ルートLとに基づいて車体3の自動走行及び昇降装置8の制御を行う自動走行制御部60aと、を備え、自動走行制御部60aは、車体3を走行させ且つ昇降装置8に対地作業装置30を昇降させながら、制動装置25を制動させる。上記構成によれば、対地作業装置30を昇降させることによって対地作業装置30の対地作業に対する抵抗や、その抵抗の反力が変動して、作業機1の走行速度が予期せず増加することを抑制しつつ、自動走行を行うことができる。
また、昇降装置8は、対地作業装置30を昇降させ、対地作業装置30が接地していない非作業姿勢と、対地作業装置30が接地し作業を行う作業姿勢と、に切り換え可能であり、自動走行制御部60aは、昇降装置8が非作業姿勢から作業姿勢に安定するまでの間
、制動装置25を制動させる。上記構成によれば、昇降装置8が非作業姿勢から作業姿勢に移行するに際して、作業姿勢で安定せず、対地作業装置30の対地作業に対する抵抗の反力を受けて、作業機1の走行速度が予期せず増加することを抑制できる。
また、自動走行制御部60aは、昇降装置8が非作業姿勢から作業姿勢に切り換わり、対地作業装置30の作業部33の圃場に対する上下位置が所定位置に達するまでの間、制動装置25を制動させる。上記構成によれば、作業部33が所定位置に達し、対地作業装置30の対地作業に対する抵抗の反力が安定するまでの間、作業機1の走行速度が予期せず増加することを抑制できる。
また、昇降装置8は、対地作業装置30を昇降させ、対地作業装置30が接地していない非作業姿勢と、対地作業装置30が接地し作業を行う作業姿勢と、に切り換え可能であり、自動走行制御部60aは、昇降装置8が作業姿勢から非作業姿勢に安定するまでの間、制動装置25を制動させる。上記構成によれば、昇降装置8が作業姿勢から非作業姿勢に移行するに際して、非作業姿勢で安定せず、対地作業装置30の対地作業に対する抵抗が減少することで作業機1の走行速度が予期せず増加することを抑制することができる。
また、自動走行制御部60aは、昇降装置8が作業姿勢から非作業姿勢に切り換わり、対地作業装置30の作業部42の圃場に対する上下位置が所定位置に達するまでの間、制動装置25を制動させる。上記構成によれば、作業部42が所定位置に達し、対地作業装置30の対地作業に対する抵抗の反力が安定するまでの間、作業機1の走行速度が予期せず増加することを抑制できる。
また、対地作業装置30は、回転して耕耘を行う耕耘爪33bと、耕耘爪33bを覆う耕耘カバー34と、を有するロータリ耕耘機であり、耕耘カバー34は、揺動自在に取り付けられており、且つ下端部が圃場に接地可能であり、当該耕耘カバー34の揺動角度θ1を検出する角度検出部70が設けられ、自動走行制御部60aは、耕耘カバー34の揺動角度θ1が所定未満である場合、制動装置25を制動させる。上記構成によれば、耕耘カバー34の揺動角度θ1が所定未満であって、耕耘爪33bが回転して対地作業装置30を前進させ、車体3を押し出すことを抑制できる。
また、昇降装置8には、車体3及び/又は対地作業装置30から付与される負荷f1を検出する負荷検出部71が設けられ、自動走行制御部60aは、負荷検出部71が検出した負荷f1の変化量Δfが所定以上である場合、制動装置25を制動させる。上記構成によれば、負荷検出部71が検出した負荷f1の変化量Δfが所定以上、即ち対地作業装置30が昇降装置8を介して車体3を押し出し、負荷検出部71が検出した負荷f1の増加量が所定以上である場合や、対地作業装置30と圃場との間の抵抗力が減少し、負荷検出部71が検出した負荷f1の減少量が所定以上である場合に、作業機1の走行速度が予期せず増加することを抑制できる。
また、車体3の走行速度の加速度αを取得する加速度取得部60hを備え、自動走行制御部60aは、加速度α検出部が検出した加速度αが所定以上である場合、制動装置25を制動させる。上記構成によれば、加速度αが所定以上であって作業機1が急に増速することを抑制できる。
また、車体3及び対地作業装置30のピッチ角を取得するピッチ角取得部60iを備え、自動走行制御部60aは、ピッチ角取得部60iが取得したピッチ角が所定以上である場合、制動装置25を制動させる。上記構成によれば、車体3が傾斜して圃場に対して不安定になっている場合に、作業機1の駆動力が変動して、急に増速することを抑制できる。
また、走行装置7に付与される荷重f2を検出する荷重検出部73を備え、走行装置7は、車輪7F,7Rと、車輪7F,7Rを支持する車軸21と、を有し、荷重検出部73は、車軸21に取り付けられ、当該車軸21の変形に基づいて車輪7F,7Rに付与される荷重f2を検出し、自動走行制御部60aは、荷重検出部73が検出した荷重f2が所定以上減少した場合、制動装置25を制動させる。上記構成によれば、一部の車輪7F,7Rの荷重f2が減少し、他の車輪7F,7Rのトラクションが増加して作業機1の走行速度が急に増速することを抑制できる。
なお、第1閾値M1〜第10閾値M10は、予め設定された値であり、作業機1と無線又は有線で通信可能に接続された端末、例えば作業機1に設けられた表示装置68を操作することで、値を任意に設定できるものでもよい。
以上、本発明について説明したが、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。