JP2021069335A - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- JP2021069335A JP2021069335A JP2019198982A JP2019198982A JP2021069335A JP 2021069335 A JP2021069335 A JP 2021069335A JP 2019198982 A JP2019198982 A JP 2019198982A JP 2019198982 A JP2019198982 A JP 2019198982A JP 2021069335 A JP2021069335 A JP 2021069335A
- Authority
- JP
- Japan
- Prior art keywords
- elevating
- field
- road
- control device
- working machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003028 elevating effect Effects 0.000 claims abstract description 172
- 238000001514 detection method Methods 0.000 claims abstract description 52
- 230000001174 ascending effect Effects 0.000 abstract description 15
- 238000010586 diagram Methods 0.000 abstract description 7
- 230000005540 biological transmission Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 13
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 210000000078 claw Anatomy 0.000 description 2
- 230000000994 depressogenic effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000011895 specific detection Methods 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000004397 blinking Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
Images










Landscapes
- Lifting Devices For Agricultural Implements (AREA)
Abstract
Description
前記制御装置(7)は、前記作業機(90)の昇降位置のうち路上の走行に適した路上用昇降範囲のデータを有するとともに、前記識別手段(10)が圃場の外側にいることを識別した場合に前記昇降位置検知センサ(73)で検知される昇降位置が前記路上用昇降範囲内でないと判別したときに前記作業機(90)の昇降位置が適切でないことを警告する情報を前記報知装置(20)に報知させるよう制御することを特徴とする作業車両である。
請求項4に記載の発明は、請求項3に記載の作業車両において、前記制御装置(7)は、前記作業機(90)の昇降位置が前記圃場用昇降範囲内でないと判別したとき、前記作業機(90)を前記圃場用昇降範囲内の最上の位置に上昇させる動作を前記昇降装置(8)に実行させるよう制御することを特徴とする作業車両である。
請求項6に記載の発明は、請求項5に記載の作業車両において、前記制御装置(7)は、前記測位装置(101)で測位される自己位置が前記圃場の位置データに照らして圃場の外側から内側に入るか否かを識別することを特徴とする作業車両である。
請求項8に記載の発明は、請求項7に記載の作業車両において、前記制御装置(7)は、前記切替え検知センサ(76)から前記切替えレバー(22)が前記連結を解除できる状態に切り替えられた情報を入手したときに前記車体(2)が圃場の外側から内側に入ると識別することを特徴とする作業車両である。
したがって、本発明によれば、作業機を装着した状態で路上を走行する場合でも適切な状態で路上の走行ができる。
請求項4に記載の発明によれば、車体が圃場の外側から内側に入るときに作業機の昇降位置が圃場用昇降範囲内でない場合には、作業機が圃場用昇降範囲の最上の位置に上昇させられる。これにより、運転者は、作業機を装着した状態で圃場の内側に入るときに、適切な状態で確実に圃場内に入ることができる。
請求項6に記載の発明によれば、車体が圃場の外側から内側に入ることが制御装置における自己装置と圃場の位置データとの照合により素早く識別されるようになり、作業機の昇降位置が圃場用昇降範囲内でないと判別されるときの報知装置による報知まで迅速に行われるようになる。
請求項8に記載の発明によれば、切替え検知センサから切替えレバーが連結を解除できる状態に切り替えられた情報を入手したときに制御装置により車体が圃場の外側から内側に入ることを推測して識別することになり、識別手段が測位装置で構成される場合に比べると、車体の位置を簡易的に識別することができる。
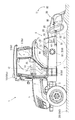
第1の実施形態に係る作業車両の一例であるトラクタ1は、図1に示されるように、車体フレーム2にエンジン3、動力伝達装置4、左右一対の前輪5および後輪6、操縦席9等の機器が搭載されている。
このうちエンジン3は、車体フレーム2に対して開閉可能に設けられたボンネットカバー11で覆われて形成されるエンジンルーム内に配置されている。動力伝達装置4は、主変速装置、副変速装置等で構成されている。操縦席9は、車体フレーム2の後方側の位置に配置されており、座席部9a、床面部9b、キャビン部9c等を有している。キャビン部9cは、屋根部、窓部、ドア部、囲い壁部等を組み合わせて操縦席9の空間を形成している。
また、トラクタ1は、車体フレーム2や動力伝達装置4の後部に、ロータリ耕うん装置等の作業機90を着脱可能に装着して昇降動させる昇降装置8や、作業機90で利用される回転動力を出力するPTO軸49が設けられている。
ステアリングコラム21の上部でステアリングホイール12の下方側の周辺部分には、図3等に示されるように、前後進切替えレバー14、スロットルレバー15等が設けられている。前後進切替えレバー14は、前進走行と後進走行との切り替えを行うように操作されるレバーである。スロットルレバー15は、エンジン3の回転数を所定の範囲(例えば、所定の低速回転数と高速回転数の2種類)内で選択するよう操作されるレバーである。
路上走行モードとしての「路上走行」は、公道を走行するときや、圃場の出入り、傾斜地等の場所を走行するときに適した機能や動作が予め選定されており、例えば4WD,2WDの駆動切り替え機能や水平切替え等が実行されるよう設定されている。
作業走行モードとしての「耕うん」は、圃場等の作業場において行われる作業に適した機能や動作が予め選定されている。その機能や動作としては、例えば、4WDに固定されること、後進に切り替えたときやステアリングホイール12を切ったときに作業機90を自動で上昇させること、旋回時に内側の後輪6に自動的にブレーキをかけること等の機能や動作であり、これらが実行されるよう設定されている。
モード切替えスイッチ23には、カスタマイズ設定モードとしての「こだわり」も用意されている。このカスタマイズ設定モードとしての「こだわり」は、主に作業時の機能について運転者が任意に選択変更することが可能なモードであり、主に作業走行モードとしての「耕うん」における機能や動作の採用の有無を選択することができる。
副変速レバー25は、副変速ギヤ機構におけるギヤの組み合わせとして、例えば低速段、中速段および高速段の3種類の副変速段を選択して切り替えることができるよう操作される。
主変速レバー26は、主変速装置におけるギヤの組み合わせとして、例えば1段(低速側)から15段(高速側)までの複数の主変速段のいずれかに切り替えることができるよう操作される。ポジションレバー27は、作業機90の昇降位置として、例えば1段(最低の位置)から8段(最上の位置)までの複数の昇降位置を自由に選択して設定することができるよう操作される。
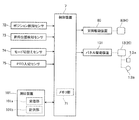
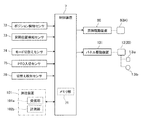
制御装置7は、例えばマイクロコンピュータ等で構成されており、メモリ部71に格納されている制御用のプログラムやデータに基づいて必要な判別や制御を行うよう作動するよう構成されている。メモリ部71は、内部に配置されている記憶素子に限らず、外部に接続されて使用される外部記憶装置などを含むものである。
すなわち、制御装置7は、ポジションレバー27の選択した昇降位置(の段数)を検知するポジション検知センサ72、作業機90の実際の昇降位置を検知する昇降位置検知センサ73、モード切替えスイッチ23の切り替えたモードを検知するモード切替えセンサ74、PTO入切スイッチ28の入切の状態を検知するPTO入切センサ75等が接続されており、その各センサ72〜75等で検知された情報が入力されるようになっている。
このうち昇降位置検知センサ73は、例えば、実際にリフトアーム82の位置を検知し、その位置情報から作業機90の実際の昇降位置を換算して得るよう構成されている。
ここで、制御装置7は、例えば、ポジションレバー27の選択した昇降位置の情報がポジション検知センサ72から得られると、作業機90が選択された昇降位置でとどまるよう昇降装置8の動作を制御する。
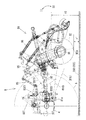
すなわち、路上用昇降範囲は、路上を走行するときに作業機90の一部(最下部)が路上に接触することを回避するために必要な地面200(公道202の路面)からの下限の高さH1と、路上を走行するときに作業機90が加わることにより重心位置が高くなる傾向があって転倒等の危険が発生しにくい安全な走行状態を確保するために必要な地面200(公道202の路面)からの上限の高さH2との間におさまる範囲である。下限の高さH1としては、例えば20cm程度が好ましい。
この場合、作業機90の最下部としては、例えば、複数の耕うん爪92のうち最も下方に位置しているときの耕うん爪92における下端部92dなどが該当する。また、上限の高さH2は、作業機90の上昇可能な最高の高さよりも低い高さに設定される。
また図2において二点鎖線で示すロワアーム81Lは、最下位の状態まで下げられたときの状態である。
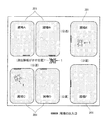
この際、制御装置7では、測位装置101の計測部101bからの座標位置に基づいて上記位置検出部で得られる車体フレーム2の位置情報とメモリ部71に格納されている圃場201の位置データとを照合することで、車体フレーム2が圃場201の外側にいるか否かが判別される。ここで、トラクタ1が例えば図7に示されるように作業走行をした圃場201Bから公道に移動すると、車体フレーム2が圃場201の外側にいると識別される。また、制御装置7が公道の位置データまで有している場合は、公道に移動したトラクタ1の前後方向が図7に例示されているトラクタ1のように公道の走行方向とほぼ平行する位置関係になっていることまでを判別したときに、車体フレーム2が圃場201の外側にいると識別するように構成してもよい。
この際、制御装置7では、昇降位置検知センサ73で検知される作業機90の昇降位置が上記路上用昇降範囲(数値範囲)に含まれるか否かが判別される。なおこのときの判別動作では、ポジションレバー27が選択する昇降位置に関するポジション検知センサ72から得られる情報は利用されない。
一方、ステップS11において作業機90の昇降位置が上記路上用昇降範囲内であると判別された場合は、一連の制御動作が終了する。
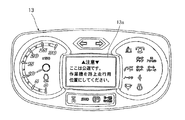
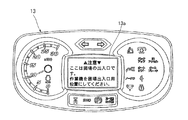
このときの報知は、例えば図9に示されるように「作業機を路上走行用位置にしてください。」のような警告メッセージを、メータパネル13における表示画面部13a(図6)に表示することで行われる。またこのときの報知は、図9に例示されるような「注意。ここは公道です。」等のトラクタ1が存在する場所を知らせる警告メッセージも併せて表示することで行うようにするとよい。
このときの制御装置7は、上記報知が行われた後に、モード切替えセンサ74からモード切替えスイッチ23が路上走行(公道走行)に切り替えられた検知情報を入手すると、作業機90を路上用昇降範囲におさまる予め設定された高さまで移動させる昇降動作を昇降装置8が実行するよう昇降駆動装置80を通して制御する。ちなみに、このトラクタ1では、モード切替えスイッチ23が路上走行(公道走行)に切り替えられると、ポジションレバー27を操作しても昇降装置8による作業機90の昇降動作が変更されないよう抑制作用が発生するよう構成されている。
この実施形態では、運転者がモード切替えスイッチ23を路上走行(公道走行)に切り替えることで、昇降装置8が作動して作業機90を上記路上用昇降範囲内におさめる昇降動作が行われるが、そのときの作業機90の実際の昇降位置についても昇降位置検知センサ73で検知されるようになっている。
具体的には、作業機90の昇降位置が路上の走行に適した下限の高さH1以上の高さにされた場合は、その路上走行をするときに作業機90の一部が路面に接触するおそれが回避される。また、作業機90の昇降位置が路上の走行に適した上限の高さH2以下の高さにされた場合は、その路上走行をするときに作業機90により重心位置が高くなりすぎて安全走行に支障をきたすおそれも回避される。
これにより、運転者は路上用昇降スイッチ30を操作する前にトラクタ1の周囲の状況を確認することができ、例えば上記報知とほぼ同時に作業機90を路上用昇降範囲内におさめる昇降動作が自動で開始される場合に比べると、作業機90の昇降動作を安全を確認したうえで行うことが可能になる。
図10には、本発明の第2の実施形態に係るトラクタの一部(制御の構成例)が示されている。
すなわち、第2の実施形態に係るトラクタにおける制御装置7は、まず作業機90の昇降位置のうち少なくとも作業予定の圃場201に入るときに適した圃場用昇降範囲のデータがメモリ部71に格納されている。圃場用昇降範囲は、例えば、作業機90が昇降可能な範囲のうち最も高い位置に上げられた位置(最上げの位置)が設定される。
この際、制御装置7では、測位装置101の計測部101bからの座標位置に基づいて上記位置検出部で得られる車体フレーム2の位置情報とメモリ部71に格納されている圃場201(その出入口を含む)の位置データとを照合することで、車体フレーム2が圃場201の外側から内側に入るところか否かが判別される。
この際、制御装置7では、昇降位置検知センサ73で検知される作業機90の昇降位置が上記圃場用昇降範囲(数値範囲)に含まれるか否かが判別される。
一方、ステップS21において作業機90の昇降位置が上記圃場用昇降範囲内であると判別された場合は、一連の制御動作が終了する。
具体的には、作業機90が最上げの昇降位置まで上げられた状態になるので、トラクタが前進で圃場201の内側に入るときに作業機90の一部が圃場201の畔等に接触したり引っ掛かったりするおそれが回避される。
図13および図14には、本発明の第3の実施形態に係るトラクタの一部(位置識別および制御の構成例)が示されている。
すなわち、第3の実施形態に係るトラクタは、図13に示されるように識別手段10について測位装置101に代えて切替えレバー22の切替え状態を検知する切替え検知センサ76を用いることで構成しているとともに、図14に示されるように制御装置7において切替え検知センサ76から切替えレバー22が左右のブレーキペダル17L,17Rを解除できない状態(ロックの状態)に切り替えられた情報を入手したときに車体フレーム2が圃場201の外側にいると識別するように構成している。
ここで、切替えレバー22は、左右のブレーキペダル17L,17Rを連結させて一体で作動させる状態か又はその連結を解除して個別に作動させる状態のいずれか一方に切り替えるときに操作された切替えペダル24の状態をロックする(固定する)又はそのロックを解除するものである。すなわち、切替えレバー22は、左右のブレーキペダル17L,17Rの連結させた状態を解除できない状態(ロック)とその連結の状態を解除できる状態(ロック解除)のいずれか一方に切り替えるときに操作される。したがって、この切替えレバー22は、図15(A)に示されるように切替えペダル24のロック状態を解除した状態(「解除」の位置)と、図15(B)に示されるように切替えペダル24を操作できないようようにロックした状態(「ロック」の位置)とのいずれか一方に、レバーの位置をずらして切り替えることができる。
このため、制御装置7は、切替え検知センサ76から切替えレバー22を解除できる状態に切り替えられた情報を入手したときに、車体フレーム2が圃場201の外側にいるとみなして識別するように構成している。
このため、運転者は作業機90を路上走行に適した昇降位置に移動させることを忘れていても、作業機90の昇降位置が適切でないことを知ることができ、作業機90が不適切な昇降位置にあるにもかかわらず路上を走行してしまうことが防止される。
以上のように、このトラクタの場合でも、作業機90を装着した状態で路上を走行する場合でも適切な状態で路上を走行することができる。
第3の実施形態に係るトラクタにおいては、制御装置7において切替え検知センサ76から切替えレバー22が左右のブレーキペダル17L,17Rの連結を解除できる状態に切り替えられた情報を入手したときに車体フレーム2が圃場201の外側から内側に入るところであると識別するように構成してもよい。
このため、運転者は作業機90を圃場201の内側に入るときに適した昇降位置に移動させることを忘れていても、作業機90の昇降位置が適切でないことを知ることができ、作業機90が不適切な昇降位置にあるにもかかわらず圃場201の内側に入ってしまうことが防止される。
以上のように、このトラクタの場合でも、作業機90を装着した状態で圃場201の内側に入る場合でも適切な状態で路上を走行することができる。
(a) 第1から第3の実施形態では、警告する情報の報知について、上記したように警告メッセージをメータパネル13の表示画面部13aに単純に表示させる構成を例示したが、例えば、以下のような報知を行うように構成してもよい。
報知として、メータパネル13の表示画面部13aにおいて警告メッセージを点滅させて表示させる構成や、メータパネル13にブザー、スピーカー等の音再生部13b(図6)がある場合には警告音を発生させる構成や、表示画面部13aにおける警告メッセージの単純表示又は点滅表示と音再生部13bにおける警告音の発生とを併用して行う構成などを採用することができる。
しかし、それ以外にも、例えば、警告する情報の報知とほぼ同時に昇降装置8を作動させて作業機90を路上用昇降範囲内におさめる昇降動作を自動で開始して実行させる構成や、警告する情報の報知がなされた後に運転者がポジションレバー27を操作することで作業機90を路上用昇降範囲におさめる昇降動作を昇降装置8に実行させる構成などを採用してもよい。
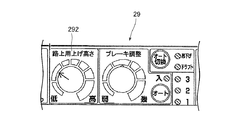
この場合は、例えば、図17に示されるように、設定パネル29に作業機90の路上用上げ高さを調整するための「路上用上げ高さ」等の設定ダイヤル292を設けて対応してもよい。このときの設定ダイヤル292は、作業機90の路上走行における最大の上げ高さ位置を任意に調整することができるものである。これにより、運転者が予め設定ダイヤル292を操作して適切な設定をしておけば、路上走行をする場合、作業機90の最大の上げ高さ位置を自動で常に路上用昇降範囲における上限の高さH2以下におさまる位置にすることが可能になる。図17中に示す矢印は、設定結果の一例を示す。
この場合、ポジション検知センサ72からの特定の情報としては、例えば、路上走行時の昇降位置に適した段数(例えば低い方の3段から6段までのいずれかの段数)であるときの情報や、圃場出入口の進入時の昇降位置に適した段数(例えば高い方の7段又は8段のいずれかの段数)であるときの情報を設定することができる。また、この場合、上記変形例(b)で説明した警告音の発生を報知の一部又は全部として採用するときには、その警告音の発生の解除も同様に行うようにしてもよい。
また、この変形例は、車体フレーム2側に設置する障害物検知センサ88Aに代えて、図19に二点鎖線で示されるように作業機90側に設置される障害物検知センサ88Bから得られる情報を利用した構成にすることも可能である。
また、第1の実施形態や第3の実施形態(その変形例を除く)では、路上用昇降スイッチ30をモード切替えスイッチ23の一部のスイッチ部分として設けることに代えて、他の部位(操縦席9の周辺部分のいずれかの位置)に設けるよう構成を採用してもよい。
さらに、第1〜第3の実施形態では、警告の報知を行う報知装置20をメータパネル13に代えて別途設けるようにしてもよい。
2 …車体フレーム(車体)
7 …制御装置
8 …昇降装置
10…識別手段
17L,17R…左右のブレーキペダル
20…報知装置
22…切替えレバー
30…路上用昇降スイッチ
73…昇降位置検知センサ
76…切替え検知センサ
90…作業機
101…測位装置(識別手段)
201 圃場
202 公道(路上)
Claims (8)
- 車体(2)と、
前記車体(2)に装着される作業機(90)と、
前記作業機(90)を昇降させる昇降装置(8)と、
前記作業機(90)の昇降位置を検知する昇降位置検知センサ(73)と、
前記車体(2)が圃場の外側にいることを識別する識別手段(10)と、
運転者に情報を報知する報知装置(20)と、
前記昇降装置(8)および報知装置(20)の動作を制御する制御装置(7)と、
を備え、
前記制御装置(7)は、前記作業機(90)の昇降位置のうち路上の走行に適した路上用昇降範囲のデータを有するとともに、前記識別手段(10)が圃場の外側にいることを識別した場合に前記昇降位置検知センサ(73)で検知される昇降位置が前記路上用昇降範囲内でないと判別したときに前記作業機(90)の昇降位置が適切でないことを警告する情報を前記報知装置(20)に報知させるよう制御することを特徴とする作業車両。 - 前記作業機(90)の昇降位置が適切でないことを警告する情報が報知された場合、前記作業機(90)を前記路上用昇降範囲内におさめるための昇降動作を前記昇降装置(8)に実行させる路上用昇降スイッチ(30)を備えることを特徴とする請求項1に記載の作業車両。
- 前記識別手段(10)は、前記車体(2)が圃場の外側から内側に入ることを識別し、
前記制御装置(7)は、前記作業機(90)の昇降位置のうち圃場に入るときに適した圃場用昇降範囲のデータを有するとともに、前記識別手段(10)が圃場の外側から内側に入ることを識別した場合に前記昇降位置検知センサ(73)で検知される昇降位置が前記圃場用昇降範囲内でないと判別したときに前記作業機(90)の昇降位置が適切でないことを警告する情報を前記報知装置(20)に報知させるよう制御することを特徴とする請求項1又は2に記載の作業車両。 - 前記制御装置(7)は、前記作業機(90)の昇降位置が前記圃場用昇降範囲内でないと判別したとき、前記作業機(90)を前記圃場用昇降範囲内の最上の位置に上昇させる動作を前記昇降装置(8)に実行させるよう制御することを特徴とする請求項3に記載の作業車両。
- 前記識別手段(10)は、前記車体(2)の自己位置を測位する測位装置(101)で構成されており、
前記制御装置(7)は、圃場の位置データを有するとともに、前記測位装置(101)で測位される自己位置が前記圃場の位置データに照らして圃場の外側であるか否かを識別することを特徴とする請求項1乃至4のいずれかに記載の作業車両。 - 前記制御装置(7)は、前記測位装置(101)で測位される自己位置が前記圃場の位置データに照らして圃場の外側から内側に入るか否かを識別することを特徴とする請求項5に記載の作業車両。
- 前記車体(2)に設けられる左右の後輪のブレーキを作動させる左右のブレーキペダル(17L,17R)と、前記左右のブレーキペダル(17L,17R)の連結を解除できない状態と当該連結を解除できる状態のいずれか一方に切り替える切替えレバー(22)とを備え、
前記識別手段(10)は、前記切替えレバー(22)の切り替えを検知する切替え検知センサ(76)で構成されており、
前記制御装置(7)は、前記切替え検知センサ(76)から前記切替えレバー(22)が前記連結を解除できない状態に切り替えられた情報を入手したときに前記車体(2)が圃場の外側にいると識別することを特徴とする請求項1乃至4のいずれかに記載の作業車両。 - 前記制御装置(7)は、前記切替え検知センサ(76)から前記切替えレバー(22)が前記連結を解除できる状態に切り替えられた情報を入手したときに前記車体(2)が圃場の外側から内側に入ると識別することを特徴とする請求項7に記載の作業車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019198982A JP7276075B2 (ja) | 2019-10-31 | 2019-10-31 | 作業車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019198982A JP7276075B2 (ja) | 2019-10-31 | 2019-10-31 | 作業車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021069335A true JP2021069335A (ja) | 2021-05-06 |
| JP7276075B2 JP7276075B2 (ja) | 2023-05-18 |
Family
ID=75711690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019198982A Active JP7276075B2 (ja) | 2019-10-31 | 2019-10-31 | 作業車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7276075B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023056118A (ja) * | 2021-10-07 | 2023-04-19 | 井関農機株式会社 | 作業車両の状態判断システム |
| US20230418292A1 (en) * | 2022-06-23 | 2023-12-28 | Toyota Jidosha Kabushiki Kaisha | Work vehicle, information processing apparatus, and method |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5413808U (ja) * | 1977-06-29 | 1979-01-29 | ||
| JPS61197805U (ja) * | 1985-05-30 | 1986-12-10 | ||
| JP2009232773A (ja) * | 2008-03-27 | 2009-10-15 | Iseki & Co Ltd | 農作業車両 |
| JP2016136878A (ja) * | 2015-01-27 | 2016-08-04 | 井関農機株式会社 | 対地作業車の作業機昇降制御 |
| JP2017023066A (ja) * | 2015-07-23 | 2017-02-02 | 三菱マヒンドラ農機株式会社 | 乗用型移植機 |
| JP2017176007A (ja) * | 2016-03-29 | 2017-10-05 | ヤンマー株式会社 | コンバイン |
| JP2018186760A (ja) * | 2017-05-08 | 2018-11-29 | 井関農機株式会社 | 作業車両 |
-
2019
- 2019-10-31 JP JP2019198982A patent/JP7276075B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5413808U (ja) * | 1977-06-29 | 1979-01-29 | ||
| JPS61197805U (ja) * | 1985-05-30 | 1986-12-10 | ||
| JP2009232773A (ja) * | 2008-03-27 | 2009-10-15 | Iseki & Co Ltd | 農作業車両 |
| JP2016136878A (ja) * | 2015-01-27 | 2016-08-04 | 井関農機株式会社 | 対地作業車の作業機昇降制御 |
| JP2017023066A (ja) * | 2015-07-23 | 2017-02-02 | 三菱マヒンドラ農機株式会社 | 乗用型移植機 |
| JP2017176007A (ja) * | 2016-03-29 | 2017-10-05 | ヤンマー株式会社 | コンバイン |
| JP2018186760A (ja) * | 2017-05-08 | 2018-11-29 | 井関農機株式会社 | 作業車両 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023056118A (ja) * | 2021-10-07 | 2023-04-19 | 井関農機株式会社 | 作業車両の状態判断システム |
| JP7677104B2 (ja) | 2021-10-07 | 2025-05-15 | 井関農機株式会社 | 作業車両の状態判断システム |
| US20230418292A1 (en) * | 2022-06-23 | 2023-12-28 | Toyota Jidosha Kabushiki Kaisha | Work vehicle, information processing apparatus, and method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7276075B2 (ja) | 2023-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6742928B2 (ja) | 作業車 | |
| CN111373894B (zh) | 工作车辆 | |
| EP3522133B1 (en) | Work vehicle vicinity monitoring system and work vehicle vicinity monitoring method | |
| JP2022089857A (ja) | 作業車両 | |
| JP2022097701A (ja) | 作業車両 | |
| JP6962166B2 (ja) | 作業車両の遠隔操作システム | |
| JP2020120619A (ja) | 作業車両 | |
| JP2021069335A (ja) | 作業車両 | |
| JP5202993B2 (ja) | 作業車両 | |
| JP2020120620A (ja) | 作業車両 | |
| JP2018000005A (ja) | 農作業車のリモート操縦装置 | |
| JP6781056B2 (ja) | 作業車 | |
| JP7196787B2 (ja) | 作業車両 | |
| JP7196786B2 (ja) | 作業車両 | |
| JP7276073B2 (ja) | 作業車両 | |
| JP6991285B2 (ja) | 作業車 | |
| JP2021026349A (ja) | 作業車両 | |
| JP2021006013A (ja) | 作業車両 | |
| JP7405044B2 (ja) | 作業車両 | |
| JP7421697B2 (ja) | 作業車両 | |
| JP7677104B2 (ja) | 作業車両の状態判断システム | |
| WO2023276392A1 (ja) | 作業機の監視システム | |
| JP7677107B2 (ja) | 作業車両の状態判断システム | |
| JP7259647B2 (ja) | 作業車両 | |
| JP2021193478A (ja) | 作業車両システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211229 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230417 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7276075 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |