JP2022014666A - 駐車支援装置 - Google Patents
駐車支援装置 Download PDFInfo
- Publication number
- JP2022014666A JP2022014666A JP2020117136A JP2020117136A JP2022014666A JP 2022014666 A JP2022014666 A JP 2022014666A JP 2020117136 A JP2020117136 A JP 2020117136A JP 2020117136 A JP2020117136 A JP 2020117136A JP 2022014666 A JP2022014666 A JP 2022014666A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- length
- space
- parking
- sum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】他車両の出庫も考慮した縦列駐車を実行する。【解決手段】本開示の一例としての駐車支援装置は、車両の周囲に存在するオブジェクトを検出することで、既に駐車している1以上の他車両の前方および後方にそれぞれ存在する前方空間および後方空間の長さを検出する検出処理部と、前方空間および後方空間のうち車両の縦列駐車を実行する候補として設定される1つの空間への車両の縦列駐車を支援するための駐車支援処理を、前方空間および後方空間のうち少なくとも一方の長さと、車両の長さと、車両の縦列駐車の完了後に車両が出庫するために車両の前方および後方に確保されるべき空間の和としての第1空間の第1長さと、車両の縦列駐車の完了後に他車両が出庫するために他車両の前方および後方に確保されるべき空間の和としての第2空間の第2長さと、の関係性に応じて選択的に実行する支援処理部と、を備える。【選択図】図4
Description
本開示は、駐車支援装置に関する。
従来から、駐車支援処理のもとでの自動運転または半自動運転による縦列駐車を支援するための技術について検討されている。このような従来の技術では、駐車支援処理を実行可能であるか否かが、縦列駐車を実行する車両の長さと、既に駐車している複数の他車両の車間距離と、を考慮して決定される。
しかしながら、上記のような従来の技術は、縦列駐車の完了後の他車両の出庫までを考慮したものではない。したがって、他車両の間に縦列駐車が実行されると、出庫を容易に実行可能な程度の十分な空間が他車両に与えられず、他車両に迷惑をかけるような不都合な状況が発生する可能性がある。
そこで、本開示の課題の一つは、他車両の出庫も考慮した縦列駐車を実行することが可能な駐車支援装置を提供することである。
本開示の一例としての駐車支援装置は、車両の周囲に存在するオブジェクトを検出することで、既に駐車している1以上の他車両の前方および後方にそれぞれ存在する前方空間および後方空間の長さを検出する検出処理部と、前方空間および後方空間のうち車両の縦列駐車を実行する候補として設定される1つの空間への車両の縦列駐車を支援するための駐車支援処理を、前方空間および後方空間の長さと、車両の長さと、車両の縦列駐車の完了後に車両が出庫するために車両の前方および後方に確保されるべき空間の和としての第1空間の第1長さと、車両の縦列駐車の完了後に他車両が出庫するために他車両の前方および後方に確保されるべき空間の和としての第2空間の第2長さと、の関係性に応じて選択的に実行する支援処理部と、を備える。
上記のような構成によれば、たとえば、第1空間および第2空間を考慮して、車両の縦列駐車の完了後に車両と他車両との出庫が容易に実行されうるか否かに応じて、駐車支援処理のもとでの縦列駐車を実行するか否かを選択することができる。したがって、他車両の出庫も考慮した縦列駐車を実行することができる。
上述した駐車支援装置において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和よりも大きく、かつ、他車両として、1つの空間の後方に駐車している第1車両と、1つの空間の前方に駐車している第2車両と、の両方が存在する場合、車両の長さと、1つの空間の長さと、第1車両の後方空間の長さと、第2車両の前方空間の長さと、第1車両の第2長さと、第2車両の第2長さと、の関係性に基づく所定の条件の成否に応じて、駐車支援処理を選択的に実行する。このような構成によれば、少なくとも、第1車両と第2車両との間の1つの空間に車両の第1空間が確保されることを条件として、駐車支援処理の実行の有無を所定の条件の成否に応じて適切に選択することができる。
この場合において、所定の条件は、1つの空間の長さと第1車両の後方空間の長さと第2車両の前方空間の長さとの和から車両の長さを差し引いた長さが第1車両の第2長さと第2車両の第2長さとの和よりも大きいという第1の条件と、1つの空間の長さと第1車両の後方空間の長さとの和から車両の長さを差し引いた長さが第1車両の第2長さよりも大きいという第2の条件と、1つの空間の長さと第2車両の前方空間の長さとの和から車両の長さを差し引いた長さが第2車両の第2長さよりも大きいという第3の条件と、を含み、支援処理部は、第1の条件と第2の条件と第3の条件との全てが成立する場合に、駐車支援処理を実行する。このような構成によれば、さらに、第1車両の第2空間と第2車両の第2空間との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
また、この場合において、支援処理部は、第1の条件と第2の条件と第3の条件とのうち少なくとも1つが成立しない場合は、車両の乗員による許可があった場合にのみ、駐車支援処理を実行する。。このような構成によれば、第1車両の第2空間と第2車両の第2空間との少なくとも一方が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
また、上述した駐車支援装置において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和よりも大きく、かつ、他車両として第1車両のみが存在する場合は、1つの空間の長さと第1車両の後方空間の長さとの和から車両の長さを差し引いた長さが第1車両の第2長さよりも大きい場合に、駐車支援処理を実行する。このような構成によれば、車両の第1空間と第1車両の第2空間との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
この場合において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和よりも大きく、他車両として第1車両のみが存在し、かつ、1つの空間の長さと第1車両の後方空間の長さとの和から車両の長さを差し引いた長さが第1車両の第2長さ以下の場合は、車両の乗員による許可があった場合にのみ、駐車支援処理を実行する。このような構成によれば、第1車両の第2空間が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
また、上述した駐車支援装置において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和よりも大きく、かつ、他車両として第2車両のみが存在する場合は、1つの空間の長さと第2車両の前方空間の長さとの和から車両の長さを差し引いた長さが第2車両の第2長さよりも大きい場合に、駐車支援処理を実行する。このような構成によれば、車両の第1空間と第2車両の第2空間との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
この場合において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和よりも大きく、他車両として第2車両のみが存在し、かつ、1つの空間の長さと第2車両の前方空間の長さとの和から車両の長さを差し引いた長さが第2車両の第2長さ以下の場合は、車両の乗員による許可があった場合にのみ、駐車支援処理を実行する。このような構成によれば、第2車両の第2空間が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
なお、上述した駐車支援装置において、支援処理部は、1つの空間の長さが車両の長さと第1長さとの和以下の場合、駐車支援処理の実行を回避し、車両の縦列駐車を実行する候補として新たに設定された1つの空間の長さが車両の長さと第1長さとの和よりも大きいか否かを判定する。このような構成によれば、第1空間をそもそも確保することができない1つの空間に対する車両の縦列駐車が実行されるのを回避することができる。
以下、本開示の実施形態および変形例を図面に基づいて説明する。以下に記載する実施形態および変形例の構成、ならびに当該構成によってもたらされる作用および効果は、あくまで一例であって、以下の記載内容に限られるものではない。
<実施形態>
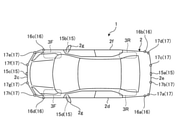
まず、図1および図2を用いて、実施形態にかかる車両1の概略的な構成について説明する。図1は、実施形態にかかる車両1の車室2a内の構成を示した例示的かつ模式的な図であり、図2は、実施形態にかかる車両1を上方から見た外観を示した例示的かつ模式的な図である。
まず、図1および図2を用いて、実施形態にかかる車両1の概略的な構成について説明する。図1は、実施形態にかかる車両1の車室2a内の構成を示した例示的かつ模式的な図であり、図2は、実施形態にかかる車両1を上方から見た外観を示した例示的かつ模式的な図である。
図1に示されるように、実施形態にかかる車両1は、ユーザとしての運転者を含む乗員が乗車する車室2aを有している。車室2a内には、ユーザが座席2bから操作可能な状態で、制動操作部4、加速操作部5、操舵操作部6、および変速操作部7などが設けられている。
制動操作部4は、車両1に制動力を発生させるための制動機構に対するドライバの操作入力を受け付ける操作入力デバイスであり、加速操作部5は、車両1に加速力を発生させるための加速機構に対するドライバの操作入力を受け付ける操作入力デバイスである。また、操舵操作部6は、車両1の転舵輪を転舵させるための転舵機構に対するドライバの操作入力を受け付ける操作入力デバイスであり、変速操作部7は、車両1の変速比を切り替えるための変速機構に対するドライバの操作入力を受け付ける操作入力デバイスである。
たとえば、図1に示される例において、制動操作部4は、運転者の足下に設けられたブレーキペダルであり、加速操作部5は、運転者の足下に設けられたアクセルペダルである。また、操舵操作部6は、ダッシュボード(インストルメントパネル)から突出したステアリングホイールであり、変速操作部7は、センターコンソールから突出したシフトレバーである。
車室2a内には、各種の画像を出力可能な表示部8と、各種の音を出力可能な音声出力部9と、を有するモニタ装置11が設けられている。モニタ装置11は、たとえば、車室2a内のダッシュボードの幅方向(左右方向)の中央部に設けられる。なお、表示部8は、たとえばLCD(液晶ディスプレイ)やOELD(有機エレクトロルミネセンスディスプレイ)などで構成されている。
ここで、表示部8において画像が表示される領域としての表示画面には、操作入力部10が設けられている。操作入力部10は、たとえば、指やスタイラスなどの指示体が近接(接触を含む)した位置の座標を検出可能なタッチパネルとして構成されている。これにより、ユーザ(運転者)は、表示部8の表示画面に表示される画像を視認することができるとともに、操作入力部10上で指示体を用いたタッチ(またはタップ)操作などを行うことで、各種の操作入力を実行することができる。
なお、実施形態では、操作入力部10が、スイッチや、ダイヤル、ジョイスティック、押しボタンなどといった、各種の物理的なインターフェースであってもよい。また、実施形態では、車室2a内におけるモニタ装置11の位置とは異なる位置に、他の音声出力装置が設けられていてもよい。この場合、音声出力部9および他の音声出力装置の両方から、各種の音情報を出力することができる。また、実施形態では、モニタ装置11が、ナビゲーションシステムやオーディオシステムなどの各種システムに関する情報を表示可能に構成されていてもよい。
また、図1および図2に示されるように、実施形態にかかる車両1は、左右2つの前輪3Fと、左右2つの後輪3Rと、を有した四輪の自動車として構成されている。以下では、簡単化のため、前輪3Fおよび後輪3Rを、総称して車輪と記載することがある。実施形態では、4つの車輪の一部または全部の横滑り角が、操舵部303aの操作などに応じて変化(転舵)する。
また、車両1には、周辺監視用の撮像部としての複数(図1および図2に示される例では4つ)の車載カメラ15a~15dが搭載されている。車載カメラ15aは、車体2の後側の端部2e(たとえば、リヤトランクのドア2hの下方)に設けられ、車両1の後方の領域を撮像する。また、車載カメラ15bは、車体2の右側の端部2fのドアミラー2gに設けられ、車両1の右側方の領域を撮像する。また、車載カメラ15cは、車体2の前側の端部2c(たとえば、フロントバンパ)に設けられ、車両1の前方の領域を撮像する。また、車載カメラ15dは、車体2の左側の端部2dのドアミラー2gに設けられ、車両1の左側方の領域を撮像する。以下では、特に区別する必要が無い場合、車載カメラ15a~15dを単に車載カメラ15と記載することがある。
車載カメラ15は、たとえば、CCD(電荷結合素子)やCIS(CMOS(相補性金属酸化膜半導体)イメージセンサ)などといった撮像素子を有したいわゆるデジタルカメラである。車載カメラ15は、所定のフレームレートで車両1の周囲の撮像を行い、当該撮像によって得られた撮像画像の画像データを出力する。車載カメラ15により得られる画像データは、フレーム画像として動画像を構成することも可能である。
また、車体2には、車両1の周辺に存在する人および物(路面を含む)などのオブジェクトまでの距離を検出するための測距センサとして利用可能な測距部16および17が設けられている。測距部16および17は、波動の送受信に基づいてオブジェクトまでの距離を検出するソナーまたはレーザレーダなどとして構成されている。図2に示される例において、測距部16は、4つの測距部16a~16dにより構成されており、測距部17は、7つの測距部17a~17hにより構成されている。
測距部16は、車両1の側方のオブジェクトを検出するように設けられており、測距部17は、車両1の前方および後方のオブジェクトを検出するように設けられている。また、測距部16は、たとえば車両1に対して比較的遠い位置のオブジェクトを検出するように構成されており、測距部17は、たとえば車両1に対して比較的近い距離にあるオブジェクトを検出するように構成されている。
次に、図3を用いて、実施形態にかかる車両1において各種の制御を実現するために設けられるシステム構成について説明する。なお、図3に示されるシステム構成は、あくまで一例であるので、様々に設定(変更)可能である。
図3は、実施形態にかかる車両1のシステム構成を示した例示的かつ模式的なブロック図である。
図3に示されるように、実施形態にかかる車両1は、制動システム301と、加速システム302と、操舵システム303と、変速システム304と、障害物センサ305と、走行状態センサ306と、車載カメラ15と、モニタ装置11と、車両制御装置310と、車載ネットワーク350と、を有している。
制動システム301は、車両1の減速を制御する。制動システム301は、制動部301aと、制動制御部301bと、制動部センサ301cと、を有している。
制動部301aは、車両1の制動機構を駆動するためのたとえばアクチュエータである。制動部301aは、制動操作部4に対する操作をアシストする形で作動してもよいし、制動操作部4に対する操作とは別個に作動してもよい。
制動制御部301bは、たとえば、CPU(中央演算処理装置)などといったハードウェアプロセッサを有したマイクロコンピュータとして構成される。制動制御部301bは、たとえば車載ネットワーク350経由で入力される指示に基づいて制動部301aを作動させることで、車両1の減速度合を制御する。
制動部センサ301cは、制動部301a(および制動操作部4)の状態を検出するためのセンシングデバイスである。制動部センサ301cによる検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用される。
加速システム302は、車両1の加速を制御する。加速システム302は、加速部302aと、加速制御部302bと、加速部センサ302cと、を有している。
加速部302aは、車両1の加速機構を駆動するためのたとえばアクチュエータである。制動部301aは、加速操作部5に対する操作をアシストする形で作動してもよいし、加速操作部5に対する操作とは別個に作動してもよい。
加速制御部302bは、たとえば、CPUなどといったハードウェアプロセッサを有したマイクロコンピュータとして構成される。加速制御部302bは、たとえば車載ネットワーク350経由で入力される指示に基づいて加速部302aを作動させることで、車両1の加速度合を制御する。
加速部センサ302cは、加速部302a(および加速操作部5)の状態を検出するためのセンシングデバイスである。加速部センサ302cによる検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用される。
操舵システム303は、車両1の進行方向を制御する。操舵システム303は、操舵部303aと、操舵制御部303bと、操舵部センサ303cと、を有している。
操舵部303aは、車両1の転舵機構を駆動するためのたとえばアクチュエータである。操舵部303aは、操舵操作部6に対する操作をアシストする形で作動してもよいし、操舵操作部6に対する操作とは別個に作動してもよい。
操舵制御部303bは、たとえば、CPUなどといったハードウェアプロセッサを有したマイクロコンピュータとして構成される。操舵制御部303bは、たとえば車載ネットワーク350経由で入力される指示に基づいて操舵部303aを作動させることで、車両1の進行方向を制御する。
操舵部センサ303cは、操舵部303a(および操舵操作部6)の状態を検出するためのセンシングデバイスである。操舵部センサ303cによる検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用される。
変速システム304は、車両1の変速比を制御する。変速システム304は、変速部304aと、変速制御部304bと、変速部センサ304cと、を有している。
変速部304aは、車両1の変速機構を駆動するためのたとえばアクチュエータである。変速部304aは、変速操作部7に対する操作をアシストする形で作動してもよいし、変速操作部7に対する操作とは別個に作動してもよい。
変速制御部304bは、たとえば、CPUなどといったハードウェアプロセッサを有したコンピュータとして構成される。変速制御部304bは、たとえば車載ネットワーク350経由で入力される指示に基づいて変速部304aを作動させることで、車両1の変速比を制御する。
変速部センサ304cは、変速部304a(および変速操作部7)の状態を検出するためのセンシングデバイスである。変速部センサ304cによる検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用されうる。
障害物センサ305は、車両1の周囲に存在しうる物体(障害物)に関するデータを検出するためのセンシングデバイスである。障害物センサ305は、車両1の周囲に存在する物体までの距離を取得する測距センサとしての測距部16および17を含んでいる。なお、障害物センサ305は、車両1の周囲の状況を画像として取得する車載カメラ15を含んでいてもよい。障害物センサ305による検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用されうる。
走行状態センサ306は、車両1の走行状態を検出するための装置である。走行状態センサ306は、たとえば、車両1の車輪速を検出する車輪速センサや、車両1の前後方向または左右方向の加速度を検出する加速度センサや、車両1の旋回速度(角速度)を検出するジャイロセンサなどを含んでいる。走行状態センサ306による検出結果は、車載ネットワーク350に出力され、当該車載ネットワーク350上の各装置において利用されうる。
車両制御装置310は、たとえば、車両1に設けられる各種のシステムを統括的に制御することで各種の機能を実現するECU(電子制御装置)として構成されている。詳細は後述するが、実施形態にかかる車両制御装置310は、車両1の駐車(特に縦列駐車)を支援する駐車支援処理などを実行可能に構成されている。
車両制御装置310は、CPU310aと、ROM(リードオンリーメモリ)310bと、RAM(ランダムアクセスメモリ)310cと、SSD(ソリッドステートドライブ)310dと、表示制御部310eと、音声制御部310fと、を有している。
CPU310aは、車両制御装置310を統括的に制御するハードウェアプロセッサである。CPU310aは、ROM310bなどに記憶された各種の制御プログラム(コンピュータプログラム)を読み出し、当該各種の制御プログラムに規定されたインストラクションにしたがって各種の機能を実現する。なお、ここで言及している各種の制御プログラムには、上述した駐車支援処理を実行するための駐車支援プログラムが含まれる。
ROM310bは、上述した各種の制御プログラムの実行に必要なパラメータなどを記憶する不揮発性の主記憶装置である。
RAM310cは、CPU310aの作業領域を提供する揮発性の主記憶装置である。
SSD310dは、書き換え可能な不揮発性の補助記憶装置である。なお、実施形態にかかる車両制御装置310においては、補助記憶装置として、SSD310dに替えて(またはSSD310dに加えて)、HDD(ハードディスクドライブ)が設けられてもよい。
表示制御部310eは、車両制御装置310で実行されうる各種の処理のうち、主として、車載カメラ15から取得される撮像画像に対する画像処理や、モニタ装置11の表示部8に出力する画像データの生成などを司る。
音声制御部310fは、車両制御装置310で実行されうる各種の処理のうち、主として、モニタ装置11の音声出力部9に出力する音声データの生成などを司る。
車載ネットワーク350は、制動システム301と、加速システム302と、操舵システム303と、変速システム304と、障害物センサ305と、走行状態センサ306と、モニタ装置11の操作入力部10と、車両制御装置310と、を通信可能に接続する。
ここで、従来から、駐車支援処理のもとでの自動運転または半自動運転による縦列駐車を支援するための技術について検討されている。このような従来の技術では、駐車支援処理を実行可能であるか否かが、縦列駐車を実行する車両の長さと、既に駐車している複数の他車両の車間距離と、を考慮して決定される。
しかしながら、上記のような従来の技術は、縦列駐車の完了後の他車両の出庫までを考慮したものではない。したがって、たとえば自動運転または半自動運転による出庫を実行する機能を有しない他車両の間に自動運転または半自動運転による縦列駐車が実行されると、手動運転による出庫を容易に実行可能な程度の十分な空間が他車両に与えられず、他車両に迷惑をかけるような不都合な状況が発生する可能性がある。
そこで、実施形態は、次の図4に示されるような機能を有した駐車支援装置400を車両制御装置310内に実現することで、他車両の出庫も考慮した縦列駐車を実行することを実現する。
図4は、実施形態にかかる駐車支援装置400の機能を示した例示的かつ模式的なブロック図である。
図4に示される機能は、ソフトウェアとハードウェアとの協働によって車両制御装置310内に実現される。すなわち、図4に示される機能は、車両制御装置310のCPU310aがROM310bなどに記憶された所定の制御プログラム(駐車支援プログラム)を読み出して実行した結果として実現される。なお、実施形態では、図4に示される機能の少なくとも一部が専用のハードウェア(回路)によって実現されてもよい。
図4に示されるように、実施形態にかかる駐車支援装置400は、入力受付処理部401と、検出処理部402と、支援処理部403と、を備えている。
入力受付処理部401は、車両1に対する乗員(たとえばドライバ)の入力操作を受け付ける。入力操作とは、たとえば、車両1の乗員(ドライバ)が縦列駐車の支援の開始を要求する操作などである。
検出処理部402は、障害物センサ305から取得されるデータに基づいて、車両1の周囲に存在するオブジェクトを検出する。これにより、検出処理部402は、車両1の縦列駐車にあたり、既に駐車している他車両の前方および後方にそれぞれ存在する前方空間および後方空間の長さを検出する。
支援処理部503は、検出処理部402による検出結果に基づいて、縦列駐車の際に車両1が辿るべき走行経路を算出し、当該走行経路に沿った車両1の縦列駐車を支援するための駐車支援処理を実行する。
なお、実施形態において、支援処理部503は、駐車領域からの出庫の際に車両1が辿るべき走行経路を算出し、当該走行経路に沿った車両1の出庫を支援するための出庫支援処理も実行しうる。したがって、実施形態において、駐車支援装置400は、出庫支援処理を実行する出庫支援装置とも表現しうる。
上述した駐車支援処理および出庫支援処理は、図3に示される制動システム301、加速システム302、操舵システム303、および変速システム304のうち1以上を用いた車両1の自動運転または半自動運転を実現する処理として実行されてもよいし、ドライバによる手動の運転操作を前提に、当該運転操作をガイドする画像または音声を図2および図3に示されるモニタ装置11などから出力する処理として実行されてもよい。
実施形態において、縦列駐車は、たとえば次の図5に示されるような形で実行されうる。
図5は、実施形態にかかる縦列駐車の一例を示した例示的かつ模式的な図である。
図5に示されるように、実施形態の技術、たとえば4台の他車両1a、1b、1c、および1dが既に駐車している状況下での縦列駐車に適用することができる。
図5に示される例では、他車両1aおよび1bとの間に、長さL1の空間S1が設けられており、他車両1aおよび1dの間に、長さL1よりも小さい長さL2の空間S2が設けられており、他車両1bおよび1cの間に、長さL1よりも小さい長さL3の空間S3が設けられている。ここで、「長さ」とは、他車両1a~1dが並んでいる方向(前後方向、縦方向)に沿った長さである。
なお、空間S1の後方に駐車している他車両1aを第1車両と表現し、空間S1の前方に駐車している他車両1bを第2車両と表現すると、空間S1は、第1車両の前方空間でありかつ第2車両の後方空間である中間空間と表現することができる。また、空間S2は、第1車両の後方空間と表現することができ、空間S3は、第2車両の前方空間と表現することができる。
図5に示される例において、他車両1aおよび1bの間の空間S1の長さL1は、車両1の長さL0よりも大きい。したがって、空間S1は、車両1が縦列駐車を実行する候補として設定されうる1つの空間に該当し、車両1は、駐車支援処理のもとで経路Cに沿って走行することで、他車両1aおよび1bの間の最も大きい長さL1を有する空間S1内に縦列駐車を実行することが可能である。
ただし、長さL1が長さL0との関係のみを考慮して縦列駐車の可否を判定すると、前述した従来の技術のように、駐車後の車両1と他車両1aとの間に構成される空間が、他車両1aが手動運転による出庫を容易に実行可能な程度の大きさになるとは限らない(他車両1bについても同様)。
そこで、実施形態の技術は、縦列駐車の可否を判定するにあたり、次の図6または図7に示されるような、駐車後の出庫のために確保すべき余剰空間を考慮する。
図6は、実施形態にかかる余剰空間の一例を示した例示的かつ模式的な図である。
図6に示される例において、車両1の前方の空間S10は、縦列駐車後の車両1が自動運転または半自動運転で出庫するのに十分な程度に予め決められた長さαを有する余剰空間であり、他車両1aおよび1bの前方の空間S20は、車両1の縦列駐車後に他車両1aおよび1bが手動運転で出庫するのに十分な程度に予め決められた長さβを有する余剰空間である。なお、空間S10は、第1空間の一例であり、空間S20は、第2空間の一例である。また、長さαは、第1長さの一例であり、長さβは、第2長さの一例である。
一般的なドライバは、自動運転または半自動運転ほど、接触が起こる手前の限界を攻めるような高精度な手動運転を実行することができない。したがって、手動運転での出庫を実行する可能性のある他車両1aおよび1bには、自動運転または半自動運転での出庫を実行する車両1以上の大きさの空間を、出庫のための余剰空間として確保しておくことが望ましい。したがって、図6に示される例において、空間S20の長さβは、空間S10の長さα以上の値として予め決められる。
なお、図6に示される例では、分かりやすさのため、車両1の余剰空間が車両1の前方に構成されるとともに他車両1aおよび1bの余剰空間が他車両1aおよび1bの前方に構成されている。しかしながら、車両1の余剰空間は、車両1の後方に構成されてもよく、他車両1aおよび1bの余剰空間も、他車両1aおよびの後方に構成されてよい。また、次の図7に示されるように、トータルの長さが確保されていれば、車両1の余剰空間は、車両1の前方および後方に分けて構成されてもよく、他車両1aおよび1bの余剰空間も、他車両および1bの前方および後方に分けて構成されてよい。
図7は、実施形態において出庫のために確保すべき空間の図6とは異なる他の一例を示した例示的かつ模式的な図である。
図7に示される例では、車両1の前方の空間S11と、車両1の後方の空間S12との両方が、車両1の余剰空間に該当し、他車両1aおよび1bの前方の空間S21と、他車両1aおよび1bの後方の空間S22との両方が、他車両1aおよび1bの余剰空間に該当する。
ここで、図7に示される例において、空間S11の長さα1と、空間S11の長さα2との和は、図6に示される例における空間S10の長さαに等しく、空間S21の長さβ1と、空間S22の長さβ2との和は、図6に示される例における空間S20の長さβに等しい。したがって、図7に示される例においても、車両1と他車両1a~1dとのそれぞれに対して出庫のために確保すべき余剰空間が十分に与えられていると言える。
以上を踏まえて、実施形態にかかる駐車支援装置400は、原則として、他車両1aおよび1bの間の空間S1への車両1の縦列駐車後に、車両1の前方および後方のうち少なくとも一方に確保される余剰空間の和の長さが長さα=α1+α2よりも大きく、かつ、他車両1aおよび1bの前方および後方のうち少なくとも一方に確保される余剰空間の和の長さが長さβ=β1+β2よりも大きい場合に、車両1の縦列駐車のための駐車支援処理を実行可能と判定する。これにより、車両1の縦列駐車後に車両1と他車両1aおよび1bとの出庫が困難になるなどといった不都合が発生するのを抑制することができる。
以下、図8~図18を参照して、縦列駐車の実行の可否の判定に関して駐車支援装置400が実行する一連の処理についてより詳細に説明する。
図8は、実施形態にかかる駐車支援装置500が車両1の縦列駐車の際に実行する一連の処理を示した例示的なフローチャートである。
図8に示される一連の処理は、たとえば車両1の乗員(ドライバ)が縦列駐車の支援の開始を要求する操作が入力受付処理部401により受け付けられた場合に開始する。以下、一例として、図5に示されるような4台の他車両1a~1dに対する縦列駐車が実行される場合について説明する。
図8に示される例では、まず、S801において、支援処理部403は、車両1の前進を支援する。
そして、S802において、検出処理部402は、障害物センサ305から、車両1の周囲に存在するオブジェクトまでの距離に関するデータを取得する。
そして、S803において、検出処理部402は、S802で取得された情報に基づいて、車両1の縦列駐車を実行する候補としての1つの空間を設定するため、既に駐車している他車両1a~1dの車間距離を検出する。たとえば、図5に示される例では、他車両1aおよび1bとの間の空間S1の長さL1と、他車両1aおよび1dの間の空間S2の長さL2と、他車両1bおよび1cの間の空間S3の長さL3とが、車間距離として検出される。なお、以下では、簡単化のため、他車両1a~1dが存在することを前提とし、他車両1aおよび1bの間に構成される長さL1を有する空間S1が車両1の縦列駐車を実行する候補として設定される例について主に説明するが、他車両1a~1dが存在しない場合、他のオブジェクト間の距離が車間距離として検出される。
そして、S804において、支援処理部403は、S803における検出結果と、予め設定された車両1自身の長さL0と、車両1について予め決められた余剰空間の長さαと、に基づいて、L1-L0>αという条件が成立するか否かを判定する。この条件は、長さL1を有する空間S1に対する車両1の縦列駐車の完了後に車両1の余剰空間が確保されるか否かを示す。
S804において、L1-L0>αという条件が成立しないと判定された場合、空間S1は車両1の縦列駐車を実行する候補として適切でないと言える。したがって、この場合、車両1の縦列駐車を実行する次の候補の検出(設定)のため、S801に処理が戻る。なお、図8に示される例では、車両1の縦列駐車を実行する候補が自動で設定されるが、実施形態では、車両1の縦列駐車を実行する候補が乗員の手動の操作に応じて設定されても良い。
一方、S804において、L1-L0>αという条件が成立すると判定された場合、少なくとも、空間S1に対する車両1の縦列駐車の完了後に車両1の余剰空間が確保されると言える。したがって、この場合、次のS805以降の処理により、他車両1aおよび/または1bの余剰空間も考慮される。
より具体的に、S805において、支援処理部403は、たとえばS802において取得されるデータに基づいて、車両1の縦列駐車を実行する候補としての空間S1の前方に前方車両(図5に示される例では他車両1b)が存在するか否かを判定する。このS805において、前方車両が存在すると判定された場合、S806に処理が進む。
そして、S806において、支援処理部403は、車両1の縦列駐車を実行する候補としての空間S1の前方に後方車両(図5に示される例では他車両1a)が存在するか否かを判定する。このS806において、後方車両が存在すると判定された場合、S807に処理が進む。
そして、S807において、支援処理部403は、S803における検出結果と、予め設定された車両1自身の長さL0と、前方車両および後方車両について予め決められた余剰空間の長さβと、に基づいて、L1+L2+L3-L0>2βという条件が成立するか否かを判定する。この条件は、下記の図9~図18に示されるような駐車状況で成立する。
図9は、実施形態において考慮されうる1つの条件(より具体的に上記のS807の条件)が成立する駐車状況の第1の例を示した例示的かつ模式的な図である。
図9に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間と、長さβ2aを有する空間と、長さβ2aを有する空間と、長さβ2bを有する空間と、が確保されている。
図9に示される例において、長さβ1aを有する空間は、他車両1aの前方に確保されるべき余剰空間であり、長さβ2aを有する空間は、他車両1aの後方に確保されるべき余剰空間である。また、長さβ1bを有する空間は、他車両1bの前方に確保されるべき余剰空間であり、長さβ2bを有する空間は、他車両1bの後方に確保されるべき余剰空間である。このため、長さβ1aおよびβ2aの和は、他車両1aに予め設定される余剰空間βよりも大きく、長さβ1bおよびβ2bの和は、他車両1bに予め設定される余剰空間βよりも大きい。したがって、図9に示される例は、上記のS807の条件を満たす。
また、図10は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第2の例を示した例示的かつ模式的な図である。
図10に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間と、長さβ2aを有する空間と、長さβ2bを有する空間と、が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ2aを有する空間が確保されている。
図10に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9に示される例と同様である。したがって、図10に示される例も、図9に示される例と同様に、上記のS807の条件を満たす。
また、図11は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第3の例を示した例示的かつ模式的な図である。
図11に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間と、長さβ2aを有する空間と、が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ2bを有する空間と、長さβ2bを有する空間と、が確保されている。
図11に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9および図10に示される例と同様である。したがって、図11に示される例も、図9および図10に示される例と同様に、上記のS807の条件を満たす。
また、図12は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第4の例を示した例示的かつ模式的な図である。
図12に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ2aを有する空間が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ2bを有する空間と、長さβ2bを有する空間と、長さβ2bを有する空間と、が確保されている。
図12に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図11に示される例と同様である。したがって、図12に示される例も、図9~図11に示される例と同様に、上記のS807の条件を満たす。
また、図13は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第5の例を示した例示的かつ模式的な図である。
図13に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間と、長さβ2bを有する空間と、が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ2aを有する空間が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ1bを有する空間が確保されている。
図13に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図12に示される例と同様である。したがって、図13に示される例も、図9~図12に示される例と同様に、上記のS807の条件を満たす。
また、図14は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第6の例を示した例示的かつ模式的な図である。
図14に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ2bを有する空間が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ1aを有する空間と、長さβ2aを有する空間と、が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ1bを有する空間が確保されている。
図14に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図13に示される例と同様である。したがって、図14に示される例も、図9~図13に示される例と同様に、上記のS807の条件を満たす。
また、図15は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第7の例を示した例示的かつ模式的な図である。
図15に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ2aを有する空間が確保されており、他車両1bの前方の長さL3を有する空間S3内に、長さβ1bを有する空間と、長さβ2bを有する空間と、が確保されている。
図15に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図14に示される例と同様である。したがって、図15に示される例も、図9~図14に示される例と同様に、上記のS807の条件を満たす。
また、図16は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第8の例を示した例示的かつ模式的な図である。
図16に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1aを有する空間と、長さβ1bを有する空間と、長さβ2bを有する空間と、が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ2aを有する空間が確保されている。
図16に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図15に示される例と同様である。したがって、図16に示される例も、図9~図15に示される例と同様に、上記のS807の条件を満たす。
また、図17は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第9の例を示した例示的かつ模式的な図である。
図17に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1bを有する空間と、長さβ2bを有する空間と、が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ1aを有する空間と、長さβ2aを有する空間と、が確保されている。
図17に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図16に示される例と同様である。したがって、図17に示される例も、図9~図16に示される例と同様に、上記のS807の条件を満たす。
また、図18は、実施形態において考慮されうる1つの条件(より具体的にS807の条件)が成立する駐車状況の第10の例を示した例示的かつ模式的な図である。
図18に示される例では、他車両1aおよび1bの間の長さL1(>L0+α)を有する空間S1内に、長さβ1bを有する空間が確保されており、他車両1aの後方の長さL2を有する空間S2内に、長さβ1aを有する空間と、長さβ2aを有する空間と、長さβ2bを有する空間と、が確保されている。
図18に示される例において、長さβ1a、長さβ2a、長さβ1b、および長さβ2bの定義は、図9~図17に示される例と同様である。したがって、図18に示される例も、図9~図17に示される例と同様に、上記のS807の条件を満たす。
ここで、図9に示される第1の例と、図10に示される第2の例と、図11に示される第3の例と、図13に示される第5の例と、図14に示される第6の例と、図15に示される第7の例と、図16に示される第8の例と、図17に示される第9の例とは、いずれも、車両1の余剰区間と、他車両1aおよび1bの余剰空間と、の全てが確保されるように、空間S1に対する車両1の縦列駐車を実行することが可能な例に相当する。
そこで、実施形態において、図8に戻り、支援処理部403は、S807においてL1+L2+L3-L0>2βという条件が成立すると判定された場合、下記のS808およびS809の処理により、駐車状況が、図9に示される第1の例と、図10に示される第2の例と、図11に示される第3の例と、図13に示される第5の例と、図14に示される第6の例と、図15に示される第7の例と、図16に示される第8の例と、図17に示される第9の例と、のいずれかに該当するか否かを判定する。
すなわち、S808において、支援処理部403は、L1+L2-L0>βという条件が成立するか否かを判定する。この条件は、空間S1に対する車両1の縦列駐車の完了後に空間S1およびS2内に他車両1aの余剰空間を確保することが可能か否かを示す。
S808において、L1+L2-L0>βという条件が成立すると判定された場合、空間S1に対する車両1の縦列駐車の完了後に空間S1およびS2内に他車両1aの余剰空間を確保することが可能であると言える。したがって、この場合、S809に処理が進み、当該S809において、支援処理部403は、さらに、L1+L3-L0>βという条件が成立するか否かを判定する。この条件は、この条件は、空間S1に対する車両1の縦列駐車の完了後に空間S1およびS3内に他車両1bの余剰空間をさらに確保することが可能か否かを示す。
S809において、L1+L3-L0>βという条件が成立すると判定された場合、空間S1に対する車両1の縦列駐車の完了後に他車両1aおよび1bの余剰空間の両方を確保することが可能であると言える。したがって、この場合、S810に処理が進み、当該S810において、支援処理部403は、空間S1への縦列駐車が可能と判定する。
そして、S811において、支援処理部403は、空間S1への縦列駐車を支援するための駐車支援処理を開始する。そして、処理が終了する。
なお、図12に示される第4の例は、S807の条件は成立するものの、S808の条件は成立しない例に相当する。すなわち、図12に示される第4の例は、空間S1に対する車両1の縦列駐車の完了後、車両1の余剰空間と、他車両1bの余剰空間と、は確保することは可能であるものの、他車両1aの余剰空間を確保することは困難である例に相当する。
そこで、実施形態において、支援処理部403は、S808の条件が成立しないと判定された場合、S812に処理が進む。そして、S812において、モニタ装置11などを介して画像および/または音声を出力することで、乗員に問合せを行う。問合せとは、他車両1aおよび1bの両方に余剰空間を確保することができないことを認識した上で車両1の縦列駐車を実行することを許可するか否かの問合せである。
そして、S813において、支援処理部403は、S812の問合せに応じた乗員の許可があるか否か、より具体的には乗員の許可を示す所定の入力操作が入力受付処理部401により受け付けられたか否かを判定する。
S813において、乗員の許可があると判定された場合、S811に処理が進み、空間S1への縦列駐車が開始される。しかしながら、S813において、乗員の許可がないと判定された場合、車両1の縦列駐車を実行する空間の次の候補を見つけるために、S801に処理が戻る。
また、図18に示される第10の例は、S807およびS808の条件は成立するものの、S809の条件は成立しない例に相当する。すなわち、図18に示される第10の例は、空間S1に対する車両1の縦列駐車の完了後、車両1の余剰空間と、他車両1aの余剰空間と、は確保することは可能であるものの、他車両1bの余剰空間を確保することは困難である例に相当する。
そこで、実施形態において、支援処理部403は、S809の条件が成立しないと判定された場合、S808の条件が成立しないと判定された場合と同様、S812およびS813の処理により乗員の許可を確認した上で、駐車支援処理を開始するか否かを決定する。
ところで、上記の説明は、他車両1aおよび1bの両方が存在することを前提としているが、実施形態では、他車両1aおよび1bのうち一方のみが存在する場合もありうる。
たとえば、実施形態では、S805において、前方車両としての他車両1bが存在しないと判定される場合もありうる。この場合、前方車両としての他車両1bを考慮する必要がない。したがって、この場合、S814に処理が進み、当該S814において、支援処理部403は、後方車両としての他車両1aが存在するか否かを判定する。
S814において、後方車両が存在しないと判定された場合、前方車両の出庫も後方車両の出庫も考慮する必要がない。そして、車両1が出庫のための余剰空間を確保しながら縦列駐車を実行可能であることは、前のS804の判定により担保されている。したがって、この場合、S810およびS811に処理が進み、駐車支援処理が開始される。そして、処理が終了する。
一方、S814において、後方車両が存在すると判定された場合、車両1の縦列駐車の完了後に当該後方車両が出庫可能であるか否かを考慮する必要がある。したがって、この場合、次のS815に処理が進む。
S815において、支援処理部403は、L1+L2-L0>βという条件が成立するか否かを判定する。この条件は、空間S1に対する車両1の縦列駐車の完了後に他車両1aの余剰空間を確保することが可能か否かを示す。
S815において、L1+L2-L0>βという条件が成立すると判定された場合、空間S1に対する車両1の縦列駐車の完了後に他車両1aの余剰空間を確保することが可能である。したがって、この場合、S810およびS811に処理が進み、駐車支援処理が開始される。そして、処理が終了する。
一方、S815において、L1+L2-L0>βという条件が成立しないと判定された場合、空間S1に対する車両1の縦列駐車の完了後に車両1の余剰空間を確保することは可能であるものの、他車両1aの余剰空間を確保することは不可能である。したがって、この場合、S812およびS813に処理が進み、乗員の許可を確認した上で、駐車支援処理を開始するか否かが決定される。
なお、実施形態では、S805において前方車両としての他車両1aが存在しないと判定され、かつ、S806において後方車両としての他車両1bが存在しないと判定される場合もありうる。この場合、後方車両としての他車両1aを考慮することなく、前方車両としての他車両1bのみを考慮するため、次のS816に処理が進む。
S816において、支援処理部403は、L1+L3-L0>βという条件が成立するか否かを判定する。この条件は、空間S1に対する車両1の縦列駐車の完了後に他車両1bの余剰空間を確保することが可能か否かを示す。
S816において、L1+L3-L0>βという条件が成立すると判定された場合、空間S1に対する車両1の縦列駐車の完了後に他車両1bの余剰空間を確保することが可能である。したがって、この場合、S810およびS811の処理に処理が進み、駐車支援処理が開始され、処理が終了する。
一方、S816において、L1+L3-L0>βという条件が成立しないと判定された場合、空間S1に対する車両1の縦列駐車の完了後に車両1の余剰空間を確保することは可能であるものの、他車両1bの余剰空間を確保することは不可能である。したがって、この場合、S812およびS813に処理が進み、乗員の許可を確認した上で、駐車支援処理を開始するか否かが決定される。
以上説明したように、実施形態にかかる駐車支援装置400は、検出処理部402と、支援処理部403と、を備えている。検出処理部402は、車両1の周囲に存在するオブジェクトを検出することで、既に駐車している他車両1aおよび1bの前方および後方にそれぞれ存在する前方空間および後方空間としての空間S1~S3の長さL1~L3を検出する。そして、支援処理部403は、車両1の縦列駐車を実行する候補として設定される空間S1への車両1の縦列駐車を支援するための駐車支援処理を、空間S1~S3の長さL1~L3と、車両1の長さL0と、空間S10の長さαと、空間S20の長さαと、の関係性に応じて選択的に実行する。なお、空間S10は、車両1の縦列駐車の完了後に車両1が出庫するために車両1の前方および後方に確保されるべき空間(の和)であり、空間S20は、車両1の縦列駐車の完了後に他車両1aおよび1bが手動運転で出庫するために他車両1aおよび1bの前方および後方に確保されるべき空間(の和)である。
上記のような構成によれば、たとえば、空間S10およびS20を考慮して、車両1の縦列駐車の完了後に車両1と他車両1aおよび1bとの出庫が容易に実行されうるか否かに応じて、駐車支援処理のもとでの縦列駐車を実行するか否かを選択することができる。したがって、他車両1aおよび1bの出庫も考慮した縦列駐車を実行することができる。
より具体的に、実施形態において、支援処理部403は、車両1の縦列駐車を実行する候補としての空間S1の長さL1が車両1の長さL0と上記の長さαとの和よりも大きく、かつ、空間S1の後方に駐車している第1車両としての他車両1aと、空間S1の前方に駐車している第2車両としての他車両1bと、の両方が存在する場合、車両1の長さL0と、空間S1の長さL1と、他車両1aの後方空間としての空間S2の長さL2と、他車両1bの前方空間としての空間S3の長さL3と、他車両1aの空間S20の長さβと、他車両1bの空間S20の長さβと、の関係性に基づく所定の条件の成否に応じて、駐車支援処理を選択的に実行する(図8のS804~S809参照)。このような構成によれば、少なくとも、他車両1aおよび1bの間の空間S1に車両1の空間S10が確保されることを条件として、駐車支援処理の実行の有無を所定の条件の成否に応じて適切に選択することができる。
また、実施形態において、上記の所定の条件は、第1の条件と、第2の条件と、第3の条件と、を含む。第1の条件は、空間S1の長さL1と空間S2の長さL2と空間S3の長さL3と車両1の長さL0との和から車両1の長さL0を差し引いた長さが他車両1aの空間S20の長さβと他車両1bの空間S20の長さβとの和よりも大きいという条件である(図8のS807参照)。また、第2の条件は、空間S1の長さL1と空間S2の長さL2との和から車両1の長さL0を差し引いた長さが他車両1aの空間S20の長さβよりも大きいという条件である(図8のS808参照)。また、第3の条件は、空間S1の長さL1と空間S3の長さL3との和から車両1の長さL0を差し引いた長さが他車両1bの空間S20の長さβよりも大きいという条件である(図8のS809参照)。支援処理部403は、第1の条件と第2の条件と第3の条件との全てが成立する場合に、駐車支援処理を実行する。このような構成によれば、さらに、他車両1aの空間S20と他車両1bの空間S20との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
また、実施形態において、支援処理部403は、上記の第1の条件と第2の条件と第3の条件とのうち少なくとも1つが成立しない場合は、車両1の乗員による許可があった場合にのみ、駐車支援処理を実行する。このような構成によれば、他車両1aの空間S20と他車両1bの空間S20との少なくとも一方が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
また、実施形態において、支援処理部403は、空間S1の長さL1が車両1の長さL0と車両1の空間S10の長さαとの和よりも大きく、かつ、他車両1bが存在せずに他車両1aのみが存在する場合は、空間S1の長さと空間S2の長さL2との和から車両1の長さL0を差し引いた長さが他車両1aの空間S20の長さβよりも大きい場合に、駐車支援処理を実行する(図8のS814からS810を介したS811への流れ参照)。このような構成によれば、車両1の空間S10と他車両1aの空間S20との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
また、実施形態において、支援処理部403は、空間S1の長さL1が車両1の長さL0と車両1の空間S10の長さαとの和よりも大きく、他車両1bが存在せずに他車両1aのみが存在し、かつ、空間S1の長さL1と空間S2の長さL2との和から車両1の長さL0を差し引いた長さが他車両1aの空間S20の長さβ以下の場合は、車両1の乗員による許可があった場合にのみ、駐車支援処理を実行する(図8のS814からS812およびS813を介したS811への流れ参照)。このような構成によれば、他車両1aの空間S20が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
また、実施形態において、支援処理部403は、空間S1の長さL1が車両1の長さL0と車両1の空間S10の長さαとの和よりも大きく、かつ、他車両1aが存在せずに他車両1bのみが存在する場合は、空間S1の長さL1と空間S3の長さL3との和から車両1の長さL0を差し引いた長さが他車両1bの空間S20の長さβよりも大きい場合に、駐車支援処理を実行する(図8のS815からS810を介したS811への流れ参照)。このような構成によれば、車両1の空間S10と他車両1bの空間S20との両方が確保されることを条件として、駐車支援処理を適切に実行することができる。
また、実施形態において、支援処理部403は、空間S1の長さL1が車両1の長さL0と車両1の空間S10の長さαとの和よりも大きく、他車両1aが存在せずに他車両1bのみが存在し、かつ、空間S1の長さL1と空間S3の長さL3との和から車両1の長さL0を差し引いた長さが他車両1bの空間S20の長さβ以下の場合は、車両1の乗員による許可があった場合にのみ、駐車支援処理を実行する(図8のS815からS812およびS813を介したS811への流れ参照)。このような構成によれば、他車両1bの空間S20が確保されない場合であっても、乗員の許可が得られることを条件として、駐車支援処理を実行することができる。
なお、実施形態において、支援処理部403は、空間S1の長さL1が車両1の長さL0と車両1の空間S10の長さαとの和以下の場合、駐車支援処理の実行を回避し、車両1の縦列駐車を実行する候補として新たに設定された空間の長さが車両1の長さL0と車両1の空間S10の長さαとの和よりも大きいか否かを判定する(図8のS804からS801~S803を介してS804に戻るまでの流れ参照)。このような構成によれば、車両1の空間S10をそもそも確保することができない空間S1に対する車両1の縦列駐車が実行されるのを回避することができる。
なお、実施形態にかかる車両制御装置310において実行される駐車支援プログラムは、インターネットなどのネットワーク経由で提供または配布されてもよい。すなわち、実施形態にかかる車両制御装置310において実行される出庫支援プログラムは、インターネットなどのネットワークに接続されたコンピュータ上に格納された状態で、ネットワーク経由でのダウンロードを受け付ける、といった形で提供されてもよい。
<変形例>
上述した実施形態では、他車両1aおよび1bの余剰空間の長さβが予め決められている構成が例示されている。しかしながら、車種と余剰空間との関係を示すマップなどの情報が予め定義されていれば、予めたとえば機械学習により予めトレーニングされた判別器などを用いて他車両1aおよび1bの車種を判別し、判別結果とマップとを用いて、他車両1aおよび1bに対して個別に余剰空間の長さを取得する処理が実行されうる。
上述した実施形態では、他車両1aおよび1bの余剰空間の長さβが予め決められている構成が例示されている。しかしながら、車種と余剰空間との関係を示すマップなどの情報が予め定義されていれば、予めたとえば機械学習により予めトレーニングされた判別器などを用いて他車両1aおよび1bの車種を判別し、判別結果とマップとを用いて、他車両1aおよび1bに対して個別に余剰空間の長さを取得する処理が実行されうる。
また、上述した実施形態では、他車両1aおよび1bが手動運転で出庫する構成が例示されている。しかしながら、本開示の技術は、他車両1aおよび1bの両方が自動運転で出庫する構成にも、他車両1aおよび1bのうち一方が自動運転で出庫し、他方が手動運転で出庫する構成にも、適用可能である。
たとえば、車両1と他車両1aおよび1bとが通信機能を有している場合、車両1は、他車両1aおよび1bが自動運転で出庫可能な車両に該当するか否かを示す情報を通信により取得しうる。そして、この場合、車両1は、他車両1aおよび1bの各々の余剰空間の長さを通信によりさらに取得し、取得した長さに応じて、車両1の縦列駐車の際に考慮すべき他車両1aおよび1bの余剰空間の長さを適宜変更しながら、縦列駐車を実行しうる。
以上、本開示の実施形態および変形例を説明したが、上述した実施形態および変形例はあくまで一例であって、発明の範囲を限定することは意図していない。上述した新規な実施形態および変形例は、様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。上述した実施形態および変形例は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
1 車両
1a 他車両(第1車両)
1b 他車両(第2車両)
400 駐車支援装置
402 検出処理部
403 支援処理部
1a 他車両(第1車両)
1b 他車両(第2車両)
400 駐車支援装置
402 検出処理部
403 支援処理部
Claims (9)
- 車両の周囲に存在するオブジェクトを検出することで、既に駐車している1以上の他車両の前方および後方にそれぞれ存在する前方空間および後方空間の長さを検出する検出処理部と、
前記前方空間および前記後方空間のうち前記車両の縦列駐車を実行する候補として設定される1つの空間への前記車両の前記縦列駐車を支援するための駐車支援処理を、前記前方空間および前記後方空間の長さと、前記車両の長さと、前記車両の前記縦列駐車の完了後に前記車両が出庫するために前記車両の前方および後方に確保されるべき空間の和としての第1空間の第1長さと、前記車両の前記縦列駐車の完了後に前記他車両が出庫するために前記他車両の前方および後方に確保されるべき空間の和としての第2空間の第2長さと、の関係性に応じて選択的に実行する支援処理部と、
を備える、駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きく、かつ、前記他車両として、前記1つの空間の後方に駐車している第1車両と、前記1つの空間の前方に駐車している第2車両と、の両方が存在する場合、前記車両の長さと、前記1つの空間の長さと、前記第1車両の後方空間の長さと、前記第2車両の前方空間の長さと、前記第1車両の前記第2長さと、前記第2車両の前記第2長さと、の関係性に基づく所定の条件の成否に応じて、前記駐車支援処理を選択的に実行する、
請求項1に記載の駐車支援装置。 - 前記所定の条件は、前記1つの空間の長さと前記第1車両の後方空間の長さと前記第2車両の前方空間の長さとの和から前記車両の長さを差し引いた長さが前記第1車両の前記第2長さと前記第2車両の前記第2長さとの和よりも大きいという第1の条件と、前記1つの空間の長さと前記第1車両の後方空間の長さとの和から前記車両の長さを差し引いた長さが前記第1車両の前記第2長さよりも大きいという第2の条件と、前記1つの空間の長さと前記第2車両の前方空間の長さとの和から前記車両の長さを差し引いた長さが前記第2車両の前記第2長さよりも大きいという第3の条件と、を含み、
前記支援処理部は、前記第1の条件と前記第2の条件と前記第3の条件との全てが成立する場合に、前記駐車支援処理を実行する、
請求項2に記載の駐車支援装置。 - 前記支援処理部は、前記第1の条件と前記第2の条件と前記第3の条件とのうち少なくとも1つが成立しない場合は、前記車両の乗員による許可があった場合にのみ、前記駐車支援処理を実行する、
請求項3に記載の駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きく、かつ、前記他車両として前記第1車両のみが存在する場合は、前記1つの空間の長さと前記第1車両の前記後方空間の長さとの和から前記車両の長さを差し引いた長さが前記第1車両の前記第2長さよりも大きい場合に、前記駐車支援処理を実行する、
請求項2~4のうちいずれか1項に記載の駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きく、前記他車両として前記第1車両のみが存在し、かつ、前記1つの空間の長さと前記第1車両の前記後方空間の長さとの和から前記車両の長さを差し引いた長さが前記第1車両の前記第2長さ以下の場合は、前記車両の乗員による許可があった場合にのみ、前記駐車支援処理を実行する、
請求項5に記載の駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きく、かつ、前記他車両として前記第2車両のみが存在する場合は、前記1つの空間の長さと前記第2車両の前記前方空間の長さとの和から前記車両の長さを差し引いた長さが前記第2車両の前記第2長さよりも大きい場合に、前記駐車支援処理を実行する、
請求項2~6のうちいずれか1項に記載の駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きく、前記他車両として前記第2車両のみが存在し、かつ、前記1つの空間の長さと前記第2車両の前記前方空間の長さとの和から前記車両の長さを差し引いた長さが前記第2車両の前記第2長さ以下の場合は、前記車両の乗員による許可があった場合にのみ、前記駐車支援処理を実行する、
請求項7に記載の駐車支援装置。 - 前記支援処理部は、前記1つの空間の長さが前記車両の長さと前記第1長さとの和以下の場合、前記駐車支援処理の実行を回避し、前記車両の縦列駐車を実行する前記候補として新たに設定された前記1つの空間の長さが前記車両の長さと前記第1長さとの和よりも大きいか否かを判定する、
請求項2~8のうちいずれか1項に記載の駐車支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020117136A JP2022014666A (ja) | 2020-07-07 | 2020-07-07 | 駐車支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020117136A JP2022014666A (ja) | 2020-07-07 | 2020-07-07 | 駐車支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022014666A true JP2022014666A (ja) | 2022-01-20 |
Family
ID=80120467
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020117136A Pending JP2022014666A (ja) | 2020-07-07 | 2020-07-07 | 駐車支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022014666A (ja) |
-
2020
- 2020-07-07 JP JP2020117136A patent/JP2022014666A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9738276B2 (en) | Parking assist system | |
| JP6547495B2 (ja) | 駐車支援装置 | |
| EP3124359B1 (en) | Parking assist system, method, and non-transitory computer readable medium storing program | |
| US10150486B2 (en) | Driving assistance device and driving assistance system | |
| JP6062406B2 (ja) | 駐車支援装置および駐車支援方法 | |
| US9505436B2 (en) | Parking assist system | |
| US9919735B2 (en) | Control system and control method for vehicle | |
| JP2017030569A (ja) | 駐車支援装置 | |
| US10055994B2 (en) | Parking assistance device | |
| JP6629156B2 (ja) | 駐車支援装置 | |
| JP2016060226A (ja) | 駐車支援装置、駐車支援方法及び制御プログラム | |
| US11104380B2 (en) | Display controller | |
| CN110546048A (zh) | 停车辅助装置 | |
| JP7654966B2 (ja) | 周辺監視装置 | |
| US11982538B2 (en) | Passage direction detecting device | |
| JP6227514B2 (ja) | 駐車支援装置 | |
| JP2022014666A (ja) | 駐車支援装置 | |
| JP7314514B2 (ja) | 表示制御装置 | |
| JP7514153B2 (ja) | 駐車支援装置 | |
| JP2018124888A (ja) | 車両制御装置 | |
| US20240328809A1 (en) | Surrounding display device | |
| JP7434796B2 (ja) | 駐車支援装置、駐車支援方法、および駐車支援プログラム | |
| JP2024092546A (ja) | 周辺表示装置 | |
| JP2019196115A (ja) | 走行制御装置、走行制御方法、および走行制御プログラム | |
| JP2017211814A (ja) | 駐車支援装置 |