JP2022017444A - 画像誘導集束超音波処置デバイスおよび照準装置 - Google Patents
画像誘導集束超音波処置デバイスおよび照準装置 Download PDFInfo
- Publication number
- JP2022017444A JP2022017444A JP2021178654A JP2021178654A JP2022017444A JP 2022017444 A JP2022017444 A JP 2022017444A JP 2021178654 A JP2021178654 A JP 2021178654A JP 2021178654 A JP2021178654 A JP 2021178654A JP 2022017444 A JP2022017444 A JP 2022017444A
- Authority
- JP
- Japan
- Prior art keywords
- ray
- cradle
- marker
- image
- fus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/371—Surgical systems with images on a monitor during operation with simultaneous use of two cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
- A61B2090/3764—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT] with a rotating C-arm having a cone beam emitting source
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3937—Visible markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0004—Applications of ultrasound therapy
- A61N2007/0021—Neural system treatment
- A61N2007/003—Destruction of nerve tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0086—Beam steering
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0086—Beam steering
- A61N2007/0091—Beam steering with moving parts, e.g. transducers, lenses, reflectors
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Gynecology & Obstetrics (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Surgical Instruments (AREA)
Abstract

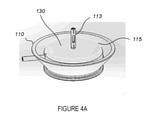
【解決手段】本装置は、アーム111と、クレードル110と、クレードル内に固定された中心軸112を有し、超音波治療エネルギービーム140を患者内の処置位置に伝達するように構成された集束超音波(FUS;focused ultrasound)トランスデューサ120と、X線画像化ユニットに接続された画像化ワークステーション180とを含む。FUSは、FUSの印加を制御するためのコントローラ160にさらに接続される。キットは、結合部材(単数または複数)を利用する。
【選択図】図2
Description
Claims (56)
- 画像誘導集束超音波(FUS;focused ultrasound)処置のためのX線誘導装置であって、
関節アームのベースで手技プラットフォームに取り付けられた、関節アームと、
前記アームの遠位端に固定されたクレードルと、
前記クレードル内に固定された照準装置と、
前記クレードル内に固定された中心軸を有し、患者内の処置位置に超音波治療エネルギービームを伝達するように構成された、集束超音波(FUS)トランスデューサであって、前記トランスデューサによる集束超音波の印加を制御するためにコントローラに接続された、FUSトランスデューサと、
X線画像化システムから画像化データを導出するように構成された画像化ユニットに接続された、画像化ワークステーションと、
を含む、装置。 - 前記クレードルは、以下の材料のタイプ:
放射線不透過性材料;
被覆材料を備えた放射線透過性材料;および
半放射線不透過性材料、
のうちのいずれかから作られる、請求項1に記載の装置。 - 前記装置は、以下のX線タイプ:
Cアーム;
Oアーム;
Gアーム;および
他の任意の一般的なx線のタイプ、
のうちのいずれかに対応する、請求項2に記載の装置。 - 前記アームは、機械的アームおよび/またはロボットアームである、請求項2に記載の装置。
- 前記アームは、前後(A‐P;anterior‐posterior)、上下(S‐I;superior‐inferior)、および左右(L‐R;left‐right)等であるがこれらに限定されないいくつかの自由度の移動を可能にする、請求項2に記載の装置。
- 前記クレードルは、前記処置位置に対する所望の角度での前記クレードルの配置を可能にするために、傾斜、ヨー、ピッチおよびロール等のいくつかの自由度からなる、請求項5に記載の装置。
- 前記手技プラットフォームは、手術室テーブルである、請求項5に記載の装置。
- 前記手技プラットフォームは、画像化テーブルである、請求項5に記載の装置。
- 前記手技プラットフォームは、前記X線アームである、請求項5に記載の装置。
- 前記手技プラットフォームは、専用カートである、請求項5に記載の装置。
- 前記カートは、移動を防ぐためにロックされる車輪上にあり、電子機器およびその他のデバイスのアクセサリを運ぶように設計される、請求項10に記載の装置。
- 前記アームは、必要な位置および向きに配置するために以下のやり方:手動、遠隔制御のうちの少なくとも1つで調節可能である、請求項5に記載の装置。
- 前記アームは、医師のX線放射被曝を伴わずに前記クレードルを移動およびアライニングすることができる、請求項5に記載の装置。
- 前記クレードルは、幾何学的円錐形状に成形され、前記円錐の側部を投影した頂点は、前記集束超音波トランスデューサの焦点ポイントと一致する、請求項5に記載の装置。
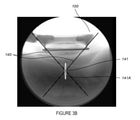
- 前記円錐形状は、前記集束超音波エネルギービームを前記処置位置に当てるための、解剖学的画像との位置合わせ、およびナビゲーションを助けるために、前記画像化システムの視野内に視認可能な円錐形状マーカとして使用される、請求項14に記載の装置。
- 前記クレードルは、前記集束超音波エネルギービームを前記処置位置に当てるための、解剖学的画像との位置合わせ、およびナビゲーションを可能にするために設けられた放射線不透過性マーカを含む、請求項14に記載の装置。
- 前記ワークステーションは、
前記ワークステーションに電子的に接続されたディスプレイシステムと;
前記X線画像化システムから処置画像を受け取ること;
前記X線処置画像を前記ディスプレイシステムに送ること;および
操作者が集束超音波エネルギービームを前記処置位置に正確かつ安全にナビゲートするのを補助するために、画像処理を用いて前記超音波エネルギービームの円錐形状を前記ディスプレイ上の前記X線処置画像の上にマークすること、
をするように構成された、処理モジュールと、
をさらに含む、請求項15または16に記載の装置。 - 前記処理モジュールは、
画像処理を用いて前記FUSトランスデューサの放射線不透過性により生じる暗領域を置き換えて前記処置位置のクリア画像を生み出すことにより、前記X線画像化を更新すること;および
前記更新されたX線画像化を前記ディスプレイシステムに送ること、
をするようにさらに構成される、請求項17に記載の装置。 - 前記処理モジュールは、
X線画像化から前記FUSトランスデューサの前記円形形状を識別すること;および
選択されたピクセルだけで画像処理を実行すること、
をするようにさらに構成される、請求項17に記載の装置。 - 前記クレードルは、前記照準装置および前記FUSトランスデューサの挿入、ロックおよび解除にスムーズに対応することができる、請求項5に記載の装置。
- 前記FUSトランスデューサは環状であり、前記処置位置の範囲内の深さに幾何学的に焦束された少なくとも2つの環状リング素子を含む、請求項1~20のいずれか一項に記載の装置。
- 前記照準装置は、前記クレードル内に置かれたモックアップと、少なくとも1つの光学マーカホルダとからなる、請求項1~21のいずれか一項に記載の装置。
- 前記照準装置は、前記少なくとも1つの光学マーカホルダの垂直軸に置かれたリング等の、サイズおよび形状が異なる2つ以上のX線マーカをさらに含む、請求項22に記載の装置。
- 前記少なくとも1つの光学マーカホルダは、前記クレードルおよび前記FUSトランスデューサの中心軸に沿って直線を作るようにアライニングされる、請求項23に記載の装置。
- 前記少なくとも1つの光学マーカホルダは、センターのX線視野の略法線に対する前記クレードルおよび前記FUSトランスデューサの位置を確かめるために追加の線を作る、請求項23に記載の装置。
- 前記モックアップは、光透過性材料から作られる、請求項23に記載の装置。
- 前記モックアップは、放射線透過性材料から作られる、請求項23に記載の装置。
- 前記モックアップは、前記クレードルおよび前記FUSトランスデューサの中心軸に沿ったソケットからなり、その中に前記少なくとも1つの光学マーカホルダが固定される、請求項23に記載の装置。
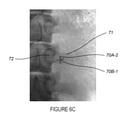
- アライメントは、前記X線インテンシファイアの略中心に置かれた少なくとも1つの放射線不透過性マーカと、前記患者の前記皮膚上の1つのマーカとの少なくとも2つのマーカを用いることにより、前記2つのマーカが重ねられる、請求項23に記載の装置。
- 前記皮膚上のマーカは、可視マーカである、請求項29に記載の装置。
- 前記皮膚上のマーカは、放射線不透過性マーカである、請求項29に記載の装置。
- 前記マーカは、臨床画像、放射線画像のうちの少なくとも1つにおいて識別されうる形状およびサイズである、請求項29に記載の装置。
- 前記少なくとも1つの放射線不透過性マーカは、放射線不透過性マーカステッカである、請求項29に記載の装置。
- 前記クレードルは、深さカメラをさらに含み、前記アライメントは、前記深さカメラにより生み出される深さ画像に基づいて行われる、請求項23に記載の装置。
- 前記クレードルは、少なくとも2つの距離センサとカメラとをさらに含み、前記アライメントは、前記X線アームインテンシファイアからの距離と前記カメラにより生み出される前記画像とに基づいて行われる、請求項23に記載の装置。
- 前記クレードルは、少なくとも2つの角度センサとカメラとをさらに含み、前記アライメントは、前記少なくとも2つの角度センサにより行われる測定と前記カメラにより生み出される前記画像とに基づいて行われる、請求項23に記載の装置。
- 前記照準装置は、前記FUSトランスデューサの中心軸に沿って前記FUSトランスデューサの前記ソケットまたは凹部内に置かれた改造型X線照準器であり、前記FUSトランスデューサの垂直軸に沿って置かれた少なくとも2つの照準マーカを含む、請求項1~21のいずれか一項に記載の装置。
- 前記照準装置は、前記FUSトランスデューサの中心軸に沿って前記FUSトランスデューサの前記ソケットまたは凹部内に置かれた光学照準器であり、前記トランスデューサの垂直軸に沿って置かれた少なくとも2つのX線照準マーカを含む、請求項1~21のいずれか一項に記載の装置。
- 前記少なくとも2つの照準マーカは、リングである、請求項37または38に記載の装置。
- 前記照準器の形状は、円筒である、請求項39に記載の装置。
- 前記照準器は、前記画像品質の干渉を低減するように設計される、請求項39に記載の装置。
- 前記照準器は、光透過性構造に設計される、請求項39に記載の装置。
- 前記照準器は、光学的にも放射線画像化でも視認可能な非対称の形状を有する、請求項39に記載の装置。
- 前記少なくとも2つの照準マーカはリングであり、前記FUSトランスデューサの垂直軸に沿って置かれる、請求項37または38に記載の装置。
- 前記FUSトランスデューサは、前記X線インテンシファイアの略中心に取り付けられた光学マーカホルダを使用して前記X線視野の中心の略法線にアライニングされる、請求項37に記載の装置。
- 前記FUSトランスデューサは、前記X線インテンシファイアの中心に取り付けられたレーザ、前記X線インテンシファイアの略中心に取り付けられたレーザおよび鏡のうちの少なくとも1つを用いて、前記X線視野の中心の法線にアライニングされる、請求項39に記載の装置。
- 前記クレードル、前記FUSトランスデューサおよび前記照準装置は、単一のユニットとして構築される、請求項1に記載の装置。
- 請求項1~36のいずれか一項に記載の装置を含み、前記処置位置の上方の前記患者の前記皮膚に対する前記中心軸の指定の角度で前記FUSトランスデューサを前記処置位置と結合するように構成された結合アクセサリをさらに含む、キット。
- 請求項32~46のいずれか一項に記載の装置を含み、前記処置位置の上方の前記患者の表面に対する前記中心軸の指定の角度で前記FUSトランスデューサを前記処置位置と結合するように構成された結合アクセサリをさらに含む、キット。
- 前記結合アクセサリは、音響流体またはゲルで満たされたバルーンである、請求項48または49に記載のキット。
- 前記結合アクセサリは、ゲルパッドである、請求項48または49に記載のキット。
- 前記結合アクセサリは、光透過性である、請求項48または49に記載のキット。
- 前記結合アクセサリは、音響透過性である、請求項48または49に記載のキット。
- 前記結合アクセサリは、放射線透過性である、請求項48または49に記載のキット。
- 請求項48に記載のキットを使用した、患者に対する画像誘導集束超音波処置の方法であって、
前記少なくとも1つの放射線不透過性マーカをX線インテンシファイアの中心に置くステップと;
前記患者を前記処置プラットフォームに腹臥位で配置するステップと;
前記X線アームが所望の角度にロックされている間に前記X線画像で見える前記放射線不透過性マーカを前記治療位置に重なるように置くために、前記X線アームを水平に移動させるステップと;
前記マーカを前記患者の皮膚上にマークするステップと;
前記結合アクセサリを、前記患者の前記皮膚上の、前記患者の皮膚上の前記マーカの上に置くステップと;
前記モックアップを備えた前記クレードルを前記結合アクセサリ上に置くステップと;
前記少なくとも1つの光学マーカホルダをオンにし、前記クレードルをアライニングするステップと;
前記治療深さを確かめるステップと;
前記モックアップを前記FUSトランスデューサで置き換えるステップと;
任意のX線照準器を前記FUSトランスデューサ内に置くステップと;
前記FUSトランスデューサがアライニングされていることを確かめるためにX線画像を撮影するステップと;
前記音響エネルギーを投入するステップと、
を含む、方法。 - 請求項49に記載のキットを使用した、患者に対する画像誘導集束超音波処置の方法であって、
放射線不透過性マーカをX線インテンシファイアの中心に置くステップと;
光学マーカホルダを前記X線インテンシファイアの中心に置くステップと;
前記患者を前記手技プラットフォームに腹臥位で配置するステップと;
前記X線アームが所望の角度の処置位置にロックされている間に前記X線画像で見える前記放射線不透過性マーカを前記処置位置に重なるように置くために、前記X線アームを水平に移動させるステップと;
前記結合アクセサリを、前記患者の前記皮膚上の、前記患者の皮膚上の前記マーカの上に置くステップと;
前記FUSトランスデューサを備えた前記クレードルを前記結合アクセサリ上に置くステップと;
前記X線照準器を前記FUSトランスデューサの中心ホールの中に置くステップと;
前記少なくとも1つの光学マーカホルダをオンにするステップと;
一方が前記X線照準器の上リング上にあり、他方が前記X線照準器の下リングにある前記中心マーカに向けるように前記レーザを用いて、前記クレードルをアライニングするステップと;
前記処置深さを確かめるステップと;
前記音響エネルギーを投入するステップと、
を含む、方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023026660A JP7605877B2 (ja) | 2015-08-10 | 2023-02-22 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562203114P | 2015-08-10 | 2015-08-10 | |
| US62/203,114 | 2015-08-10 | ||
| US201562238263P | 2015-10-07 | 2015-10-07 | |
| US62/238,263 | 2015-10-07 | ||
| US201662333896P | 2016-05-10 | 2016-05-10 | |
| US62/333,896 | 2016-05-10 | ||
| JP2018507005A JP6971967B2 (ja) | 2015-08-10 | 2016-08-10 | 画像誘導集束超音波処置デバイスおよび照準装置 |
| PCT/US2016/046328 WO2017027577A1 (en) | 2015-08-10 | 2016-08-10 | Image guided focused ultrasound treatment device and aiming apparatus |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018507005A Division JP6971967B2 (ja) | 2015-08-10 | 2016-08-10 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023026660A Division JP7605877B2 (ja) | 2015-08-10 | 2023-02-22 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022017444A true JP2022017444A (ja) | 2022-01-25 |
| JP7235834B2 JP7235834B2 (ja) | 2023-03-08 |
Family
ID=57983630
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018507005A Active JP6971967B2 (ja) | 2015-08-10 | 2016-08-10 | 画像誘導集束超音波処置デバイスおよび照準装置 |
| JP2021178654A Active JP7235834B2 (ja) | 2015-08-10 | 2021-11-01 | 画像誘導集束超音波処置デバイスおよび照準装置 |
| JP2023026660A Active JP7605877B2 (ja) | 2015-08-10 | 2023-02-22 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018507005A Active JP6971967B2 (ja) | 2015-08-10 | 2016-08-10 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023026660A Active JP7605877B2 (ja) | 2015-08-10 | 2023-02-22 | 画像誘導集束超音波処置デバイスおよび照準装置 |
Country Status (13)
| Country | Link |
|---|---|
| US (2) | US12383768B2 (ja) |
| EP (2) | EP3791929B1 (ja) |
| JP (3) | JP6971967B2 (ja) |
| KR (2) | KR102642526B1 (ja) |
| CN (2) | CN112370669B (ja) |
| CA (1) | CA2995114A1 (ja) |
| CY (1) | CY1123885T1 (ja) |
| DK (1) | DK3334497T3 (ja) |
| ES (2) | ES2842183T3 (ja) |
| IL (1) | IL257464B (ja) |
| PL (1) | PL3334497T3 (ja) |
| PT (1) | PT3334497T (ja) |
| WO (1) | WO2017027577A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN204017181U (zh) | 2013-03-08 | 2014-12-17 | 奥赛拉公司 | 美学成像与处理系统、多焦点处理系统和执行美容过程的系统 |
| KR102148854B1 (ko) * | 2018-10-31 | 2020-08-28 | (주)클래시스 | 뇌질환 치료를 위한 초음파 장치 |
| US20240122530A1 (en) * | 2018-11-26 | 2024-04-18 | The Johns Hopkins University | Wearable ultrasound and photoacoustic device for fetal and/or labor monitoring |
| JP2022513577A (ja) | 2018-11-30 | 2022-02-09 | ウルセラ インコーポレイテッド | 超音波処置の効能を増強させるためのシステムおよび方法 |
| CA3280998A1 (en) | 2019-02-13 | 2025-10-30 | Alpheus Medical, Inc. | Non-invasive sonodynamic therapy |
| EP3946127B1 (en) * | 2019-03-25 | 2025-12-31 | Fusmobile, Inc. | SYSTEMS AND METHODS FOR AIMING AND ALIGNING A PROCESSING TOOL IN AN X-RAY DEVICE |
| US12279781B2 (en) * | 2019-10-30 | 2025-04-22 | Tsinghua University | 2D-image guided robotic distal locking system |
| CN111134776B (zh) | 2020-01-10 | 2025-08-08 | 深圳市奥昇医疗科技有限责任公司 | 高强度聚焦超声设备与控制方法 |
| KR102148853B1 (ko) * | 2020-07-02 | 2020-08-28 | (주)클래시스 | 뇌질환 치료를 위한 초음파 장치 |
| CN113940747B (zh) * | 2020-07-15 | 2024-04-16 | 首都医科大学附属北京友谊医院 | 一种骨科植入物钉孔骨内通道的定位导航装置 |
| CA3185803A1 (en) | 2020-08-07 | 2022-02-10 | Vijay Agarwal | Ultrasound arrays for enhanced sonodynamic therapy for treating cancer |
| CN112107363B (zh) * | 2020-08-31 | 2022-08-02 | 上海交通大学 | 一种基于深度相机的超声溶脂机器人系统及辅助操作方法 |
| KR102588217B1 (ko) * | 2021-05-13 | 2023-10-12 | 주식회사 제이시스메디칼 | 초음파 집속깊이 조절이 가능한 초음파 발생 장치 |
| KR102431184B1 (ko) * | 2022-01-28 | 2022-08-10 | 심영석 | 방사선 조사 방지를 위한 주사 바늘 조절 장치 |
| KR102865480B1 (ko) * | 2022-12-15 | 2025-09-26 | 한국 한의학 연구원 | 자극 깊이와 자극 위치 조정 가능한 집속 초음파 장치 |
| KR102829128B1 (ko) | 2024-10-30 | 2025-07-03 | 주식회사 엣지케어 | 초음파 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05237131A (ja) * | 1991-10-24 | 1993-09-17 | Siemens Ag | 治療装置 |
| JPH06233776A (ja) * | 1993-01-14 | 1994-08-23 | Richard Wolf Gmbh | 体外治療機器 |
| JP2007507275A (ja) * | 2003-09-30 | 2007-03-29 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 放射線治療の計画および実施のための目標追跡の方法および装置 |
| JP2007525296A (ja) * | 2004-03-01 | 2007-09-06 | シーメンス アクチエンゲゼルシヤフト | 画像により補助される衝撃波治療のための装置 |
| JP2009533086A (ja) * | 2006-04-07 | 2009-09-17 | ヴァリアン メディカル システムズ テクノロジーズ インコーポレイテッド | トモシンセシス技術を用いた患者の位置決め |
Family Cites Families (68)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL8701074A (nl) * | 1987-05-07 | 1988-12-01 | Optische Ind De Oude Delft Nv | Meetmerkinrichting. |
| US4938217A (en) * | 1988-06-21 | 1990-07-03 | Massachusetts Institute Of Technology | Electronically-controlled variable focus ultrasound hyperthermia system |
| JPH0618576B2 (ja) | 1988-10-24 | 1994-03-16 | 株式会社東芝 | 衝撃波治療装置 |
| JPH03141938A (ja) | 1989-10-30 | 1991-06-17 | Toshiba Corp | 衝撃波破砕治療装置および連続波温熱治療装置 |
| DE4135328C2 (de) | 1991-10-25 | 1995-01-19 | Wolf Gmbh Richard | Extrakorporales Therapiegerät |
| JP3448778B2 (ja) * | 1992-01-31 | 2003-09-22 | 株式会社ニコン | マーク検知装置、及びその検知装置を備えた露光装置、及びその露光装置により製造されたデバイス、並びにマーク検知方法、及びその検知方法を含む露光方法、及びその露光方法を含むデバイス製造方法 |
| DE4211274C1 (en) | 1992-04-03 | 1993-04-15 | Siemens Ag, 8000 Muenchen, De | Medical treatment unit e.g. for bone fractures - produces marking on monitor to indicate different positions of radiation beam in region to be treated |
| DE4302538C1 (de) | 1993-01-29 | 1994-04-07 | Siemens Ag | Therapiegerät zur Ortung und Behandlung einer im Körper eines Lebewesens befindlichen Zone mit akustischen Wellen |
| US5553618A (en) | 1993-03-12 | 1996-09-10 | Kabushiki Kaisha Toshiba | Method and apparatus for ultrasound medical treatment |
| JP3754113B2 (ja) | 1994-09-17 | 2006-03-08 | 株式会社東芝 | 超音波治療装置 |
| DE59712045D1 (de) | 1996-08-22 | 2004-12-02 | Storz Medical Ag Kreuzlingen | Vorrichtung zur behandlung des herzens |
| US5769790A (en) * | 1996-10-25 | 1998-06-23 | General Electric Company | Focused ultrasound surgery system guided by ultrasound imaging |
| US6516699B2 (en) * | 1997-12-08 | 2003-02-11 | Horus Vision, Llc | Apparatus and method for calculating aiming point information for rifle scopes |
| US6120454A (en) * | 1998-02-03 | 2000-09-19 | Boston Scientific Corporation | Annular array ultrasound catheter |
| US20030060736A1 (en) * | 1999-05-14 | 2003-03-27 | Martin Roy W. | Lens-focused ultrasonic applicator for medical applications |
| US7510536B2 (en) | 1999-09-17 | 2009-03-31 | University Of Washington | Ultrasound guided high intensity focused ultrasound treatment of nerves |
| US7520856B2 (en) | 1999-09-17 | 2009-04-21 | University Of Washington | Image guided high intensity focused ultrasound device for therapy in obstetrics and gynecology |
| CN1121884C (zh) * | 2000-10-26 | 2003-09-24 | 上海交通大学 | 多元自聚焦超声波换能器 |
| FR2827149B1 (fr) | 2001-07-13 | 2003-10-10 | Technomed Medical Systems | Sonde de traitement par ultrasons focalises |
| JP3964655B2 (ja) * | 2001-11-12 | 2007-08-22 | 東芝松下ディスプレイテクノロジー株式会社 | 位置決め方法 |
| SE520858C2 (sv) * | 2002-01-15 | 2003-09-02 | Ultrazonix Dnt Ab | Anordning med såväl terapeutiska som diagnostiska givare för icke-invasiv ultraljudsbehandling av ett objekt |
| EP1480550B1 (en) * | 2002-02-11 | 2011-08-24 | AMO Manufacturing USA, LLC | Determining relative positional and rotational offsets |
| US7311701B2 (en) * | 2003-06-10 | 2007-12-25 | Cierra, Inc. | Methods and apparatus for non-invasively treating atrial fibrillation using high intensity focused ultrasound |
| US7305264B2 (en) | 2003-11-21 | 2007-12-04 | Ust, Inc. | Bone cancer pain management utilizing ultrasound |
| US20050154308A1 (en) | 2003-12-30 | 2005-07-14 | Liposonix, Inc. | Disposable transducer seal |
| JP2005304909A (ja) | 2004-04-23 | 2005-11-04 | Toshiba Corp | 位置決め方法 |
| US8727987B2 (en) * | 2004-05-06 | 2014-05-20 | Nanyang Technological University | Mechanical manipulator for HIFU transducers |
| US7824348B2 (en) | 2004-09-16 | 2010-11-02 | Guided Therapy Systems, L.L.C. | System and method for variable depth ultrasound treatment |
| US7553284B2 (en) | 2005-02-02 | 2009-06-30 | Vaitekunas Jeffrey J | Focused ultrasound for pain reduction |
| CA3008270A1 (en) | 2005-09-21 | 2007-03-29 | The Regents Of The University Of California | Systems, compositions, and methods for local imaging and treatment of pain |
| US20080039746A1 (en) | 2006-05-25 | 2008-02-14 | Medtronic, Inc. | Methods of using high intensity focused ultrasound to form an ablated tissue area containing a plurality of lesions |
| DE602007013502D1 (de) * | 2006-09-18 | 2011-05-12 | Mediguide Ltd | Verfahren und System zur Navigation durch ein verschlossenes röhrenförmiges Organ |
| US20080243036A1 (en) | 2007-03-27 | 2008-10-02 | Dan Voic | Spinal treatment method and associated apparatus |
| WO2009055034A1 (en) * | 2007-10-24 | 2009-04-30 | Nuvasive, Inc. | Surgical trajectory monitoring system and related methods |
| ATE499055T1 (de) | 2007-12-18 | 2011-03-15 | Storz Medical Ag | Navigation bei der fokussierten druckwellenbehandlung |
| ES2736276T3 (es) | 2008-07-14 | 2019-12-27 | Arizona Board Of Regents For And On Behalf Of Arizona State Univ | Dispositivos de modulación de la actividad celular utilizando ultrasonido |
| WO2010033875A1 (en) | 2008-09-19 | 2010-03-25 | Physiosonics, Inc. | Acoustic palpation using non-invasive ultrasound techniques to identify and localize tissue eliciting biological responses |
| WO2010040140A2 (en) | 2008-10-03 | 2010-04-08 | Mirabilis Mdedica, Inc. | Method and apparatus for treating tissues with hifu |
| US8343050B2 (en) | 2009-05-04 | 2013-01-01 | Siemens Medical Solutions Usa, Inc. | Feedback in medical ultrasound imaging for high intensity focused ultrasound |
| WO2011020104A2 (en) * | 2009-08-14 | 2011-02-17 | University Of Southern California | Extended depth-of-focus high intensity ultrasonic transducer |
| US8425435B2 (en) | 2009-09-29 | 2013-04-23 | Liposonix, Inc. | Transducer cartridge for an ultrasound therapy head |
| US9174065B2 (en) | 2009-10-12 | 2015-11-03 | Kona Medical, Inc. | Energetic modulation of nerves |
| US20160059044A1 (en) * | 2009-10-12 | 2016-03-03 | Kona Medical, Inc. | Energy delivery to intraparenchymal regions of the kidney to treat hypertension |
| EP2332614A1 (en) | 2009-12-10 | 2011-06-15 | Theraclion SAS | Ultrasound treatment device |
| US20110144544A1 (en) * | 2009-12-15 | 2011-06-16 | General Electric Company | Ultrasound transducer assembly and methods of using |
| RU2563061C2 (ru) * | 2009-12-28 | 2015-09-20 | Конинклейке Филипс Электроникс Н.В. | Оптимизация преобразователя сфокусированного ультразвука высокой интенсивности |
| EP2579944B1 (en) | 2010-06-09 | 2018-04-04 | Regents Of The University Of Minnesota | Dual mode ultrasound transducer (dmut) system and method for controlling delivery of ultrasound therapy |
| JP2012005602A (ja) * | 2010-06-23 | 2012-01-12 | Olympus Corp | 超音波照射装置 |
| GB201020249D0 (en) * | 2010-11-30 | 2011-01-12 | Airbus Uk Ltd | Ultrasonic array focussing apparatus and method |
| US8831708B2 (en) | 2011-03-15 | 2014-09-09 | Siemens Aktiengesellschaft | Multi-modal medical imaging |
| JP5557800B2 (ja) | 2011-05-24 | 2014-07-23 | 有限会社ユーマンネットワーク | 集束式音波治療装置 |
| CN102430211B (zh) * | 2011-08-19 | 2014-10-01 | 陈明 | 一种基于x光定位的聚焦治疗装置及其系统 |
| WO2013048912A2 (en) | 2011-09-26 | 2013-04-04 | Guided Therapy Systems, Llc | Reflective ultrasound technology for dermatological treatments |
| EP2763591A4 (en) * | 2011-10-09 | 2015-05-06 | Clear Guide Medical Llc | INTERVENTIONAL IN-SITU BILLING BY FUSION OF ULTRASOUND VIDEO |
| US9375588B2 (en) * | 2011-11-23 | 2016-06-28 | Siemens Aktiengesellschaft | Method and system for guided shielding of a patient volume from ultrasound energy |
| JP6207024B2 (ja) * | 2012-02-27 | 2017-10-04 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 計算器断層撮影(ct)‐高密度焦点式超音波(hifu)システムおよび/または方法 |
| CN103479403B (zh) * | 2012-06-08 | 2016-06-22 | 长庚大学 | 以手术导航系统导引聚焦式超声波释放能量的系统及其方法 |
| EP2872044B1 (en) | 2012-07-16 | 2019-03-13 | Mirabilis Medica, Inc. | Human interface and device for ultrasound guided treatment |
| EP2887873A4 (en) * | 2012-08-27 | 2016-05-25 | Target Tape Inc | HELP TO LOCALIZE A MEDICAL INTERVENTION |
| US9510802B2 (en) * | 2012-09-21 | 2016-12-06 | Guided Therapy Systems, Llc | Reflective ultrasound technology for dermatological treatments |
| US9289188B2 (en) * | 2012-12-03 | 2016-03-22 | Liposonix, Inc. | Ultrasonic transducer |
| KR20140103769A (ko) * | 2013-02-19 | 2014-08-27 | 삼성전자주식회사 | 초음파를 조사하는 방법 및 이를 이용한 초음파 장치 |
| US9827054B2 (en) * | 2014-03-14 | 2017-11-28 | Synaptive Medical (Barbados) Inc. | Intelligent positioning system and methods therefore |
| US9668768B2 (en) * | 2013-03-15 | 2017-06-06 | Synaptive Medical (Barbados) Inc. | Intelligent positioning system and methods therefore |
| KR101457666B1 (ko) * | 2013-05-31 | 2014-11-12 | 알피니언메디칼시스템 주식회사 | 냉각 기능을 가진 초음파 트랜스듀서 |
| CN103584880B (zh) * | 2013-11-04 | 2015-12-30 | 张松方 | 一种用于光野射野一致性的检测装置 |
| CN104644200B (zh) * | 2013-11-25 | 2019-02-19 | Ge医疗系统环球技术有限公司 | 减少计算机断层扫描图像重构中伪像的方法和装置 |
| US20150305823A1 (en) * | 2014-04-25 | 2015-10-29 | General Electric Company | System and method for processing navigational sensor data |
-
2016
- 2016-08-10 US US15/752,116 patent/US12383768B2/en active Active
- 2016-08-10 CN CN202011147419.1A patent/CN112370669B/zh active Active
- 2016-08-10 KR KR1020187006948A patent/KR102642526B1/ko active Active
- 2016-08-10 KR KR1020247006466A patent/KR102901080B1/ko active Active
- 2016-08-10 PL PL16835826T patent/PL3334497T3/pl unknown
- 2016-08-10 PT PT168358265T patent/PT3334497T/pt unknown
- 2016-08-10 JP JP2018507005A patent/JP6971967B2/ja active Active
- 2016-08-10 DK DK16835826.5T patent/DK3334497T3/da active
- 2016-08-10 ES ES16835826T patent/ES2842183T3/es active Active
- 2016-08-10 WO PCT/US2016/046328 patent/WO2017027577A1/en not_active Ceased
- 2016-08-10 CN CN201680054194.0A patent/CN108290053B/zh active Active
- 2016-08-10 EP EP20190745.8A patent/EP3791929B1/en active Active
- 2016-08-10 EP EP16835826.5A patent/EP3334497B1/en active Active
- 2016-08-10 CA CA2995114A patent/CA2995114A1/en active Pending
- 2016-08-10 ES ES20190745T patent/ES3036874T3/es active Active
-
2018
- 2018-02-11 IL IL257464A patent/IL257464B/en unknown
-
2020
- 2020-12-21 CY CY20201101207T patent/CY1123885T1/el unknown
-
2021
- 2021-11-01 JP JP2021178654A patent/JP7235834B2/ja active Active
-
2023
- 2023-02-22 JP JP2023026660A patent/JP7605877B2/ja active Active
-
2025
- 2025-04-03 US US19/169,084 patent/US20250229110A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05237131A (ja) * | 1991-10-24 | 1993-09-17 | Siemens Ag | 治療装置 |
| JPH06233776A (ja) * | 1993-01-14 | 1994-08-23 | Richard Wolf Gmbh | 体外治療機器 |
| JP2007507275A (ja) * | 2003-09-30 | 2007-03-29 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 放射線治療の計画および実施のための目標追跡の方法および装置 |
| JP2007525296A (ja) * | 2004-03-01 | 2007-09-06 | シーメンス アクチエンゲゼルシヤフト | 画像により補助される衝撃波治療のための装置 |
| JP2009533086A (ja) * | 2006-04-07 | 2009-09-17 | ヴァリアン メディカル システムズ テクノロジーズ インコーポレイテッド | トモシンセシス技術を用いた患者の位置決め |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3791929B1 (en) | 2025-07-02 |
| ES3036874T3 (en) | 2025-09-25 |
| PT3334497T (pt) | 2020-12-30 |
| KR102642526B1 (ko) | 2024-02-28 |
| PL3334497T3 (pl) | 2021-05-04 |
| CY1123885T1 (el) | 2022-03-24 |
| WO2017027577A1 (en) | 2017-02-16 |
| JP7605877B2 (ja) | 2024-12-24 |
| IL257464A (en) | 2018-04-30 |
| US12383768B2 (en) | 2025-08-12 |
| KR20240032165A (ko) | 2024-03-08 |
| ES2842183T3 (es) | 2021-07-13 |
| EP3334497A1 (en) | 2018-06-20 |
| DK3334497T3 (da) | 2020-12-21 |
| EP3791929C0 (en) | 2025-07-02 |
| CN108290053B (zh) | 2020-11-13 |
| KR102901080B1 (ko) | 2025-12-16 |
| CN112370669A (zh) | 2021-02-19 |
| EP3334497A4 (en) | 2019-04-17 |
| EP3791929A1 (en) | 2021-03-17 |
| JP6971967B2 (ja) | 2021-11-24 |
| US20250229110A1 (en) | 2025-07-17 |
| IL257464B (en) | 2021-10-31 |
| JP2023058733A (ja) | 2023-04-25 |
| CN108290053A (zh) | 2018-07-17 |
| US20180236270A1 (en) | 2018-08-23 |
| JP7235834B2 (ja) | 2023-03-08 |
| KR20180038538A (ko) | 2018-04-16 |
| CA2995114A1 (en) | 2017-02-16 |
| JP2018525104A (ja) | 2018-09-06 |
| CN112370669B (zh) | 2023-11-17 |
| EP3334497B1 (en) | 2020-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7235834B2 (ja) | 画像誘導集束超音波処置デバイスおよび照準装置 | |
| JP6181459B2 (ja) | 放射線治療システム | |
| EP3517174B1 (en) | PORTABLE DEVICES FOR THE PROJECTION OF FOCUSED ULTRASOUND | |
| US8414472B2 (en) | Navigation for focused wave treatment | |
| JP2022058793A (ja) | グリッドレス経会陰前立腺症候群に対するシステム及びワークフロー | |
| US20250090130A1 (en) | Co-registration techniques between computed tomography imaging systems and histotripsy robotic systems | |
| JP2012080948A (ja) | 手術支援システムおよび手術支援方法 | |
| KR200487320Y1 (ko) | 틸팅 가능한 헤드부를 구비한 수술 내비게이션 시스템 | |
| CN121568658A (zh) | 手术机器人系统和用于限定这种手术机器人系统的受限访问体积的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7235834 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |