JP2022123739A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2022123739A JP2022123739A JP2021021245A JP2021021245A JP2022123739A JP 2022123739 A JP2022123739 A JP 2022123739A JP 2021021245 A JP2021021245 A JP 2021021245A JP 2021021245 A JP2021021245 A JP 2021021245A JP 2022123739 A JP2022123739 A JP 2022123739A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- driver
- establishment
- closeness
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Instrument Panels (AREA)
- Control Of Transmission Device (AREA)
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
Abstract
【課題】ドライバビリティを向上させることができる車両の制御装置を提供すること。
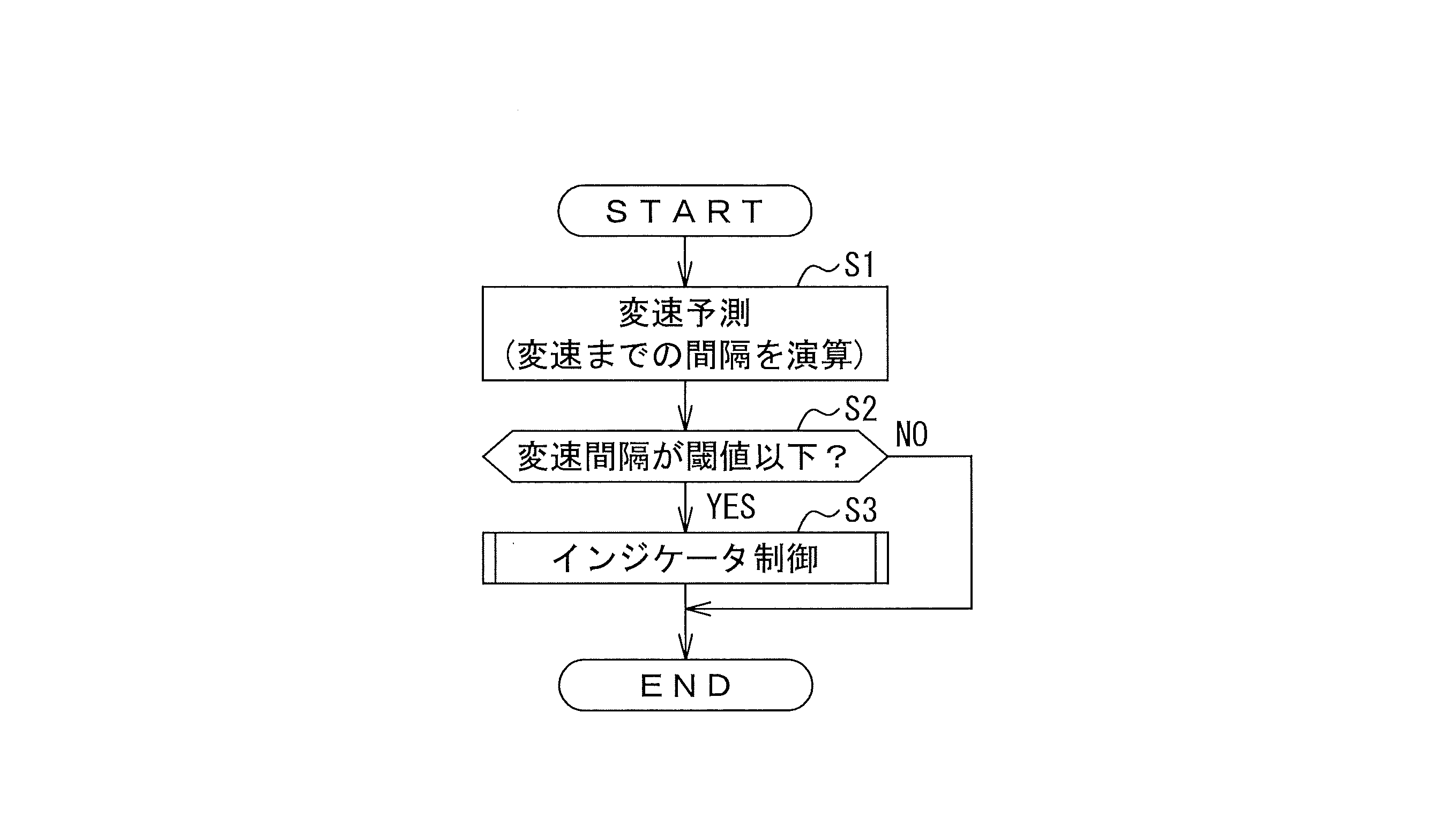
【解決手段】制御部は、車両の走行状態に基づいて自動変速機の変速条件の成立までの近さを予測し(ステップS1)、変速条件の成立までの近さが所定の閾値以内であると予測した場合(ステップS2でYES)、変速条件の成立が近いことを報知部によってドライバに報知する(ステップS3)。制御部は、変速条件の成立までの近さが所定の閾値以内であると予測した場合、閾値以内であることを、変速条件の成立までの近さに応じて異なる報知態様でドライバに報知する。
【選択図】図2
【解決手段】制御部は、車両の走行状態に基づいて自動変速機の変速条件の成立までの近さを予測し(ステップS1)、変速条件の成立までの近さが所定の閾値以内であると予測した場合(ステップS2でYES)、変速条件の成立が近いことを報知部によってドライバに報知する(ステップS3)。制御部は、変速条件の成立までの近さが所定の閾値以内であると予測した場合、閾値以内であることを、変速条件の成立までの近さに応じて異なる報知態様でドライバに報知する。
【選択図】図2
Description
本発明は、車両の制御装置に関する。
従来、自動変速機の変速に関する情報をドライバに知らせる技術として、特許文献1に記載されたものが知られている。特許文献1に記載のものは、自動変速機の変速段の切替動作中にアクセルペダルの踏み込み反力を大きくしている。これにより、特許文献1に記載のものは、インジケータを目視することなく変速段の切替動作の完了を知覚できる。
ここで、自動変速機には、手動変速機を元に変速操作を自動化したAMT(Automated Manual Transmission)がある。AMTを搭載する車両においては、変速動作中はクラッチが開放され、駆動輪に動力が伝達されないトルク抜けの状態が一時的に発生する。このため、道路のカーブを走行中等のドライバが意図しないタイミングで変速動作が行われた場合、クラッチの開放によるトルク抜けが発生し、ドライバビリティが損なわれるおそれがある。
しかしながら、特許文献1に記載の技術において自動変速機がAMTから構成されている場合、ドライバは、変速動作の発生タイミングを前もって知ることができないため、ドライバの意図しないタイミングで変速が行われることでドライバビリティを損なってしまうおそれがあった。
本発明は、上述したような事情に鑑みてなされたもので、ドライバビリティを向上させることができる車両の制御装置を提供することを目的としている。
本発明は、上記目的達成のため、変速中にエンジンから駆動輪への動力を切断するクラッチを有する自動変速機を搭載する車両の制御装置であって、ドライバに情報を報知する報知部と、車両の走行状態に基づいて前記自動変速機の変速条件の成立までの近さを予測する制御部と、を備え、前記制御部は、前記自動変速機の変速条件の成立までの近さが所定の閾値以内であると予測した場合、前記変速条件の成立が近いことを前記報知部によってドライバに報知することを特徴とする。
本発明によれば、ドライバビリティを向上させることができる。
本発明の一実施の形態に係る車両の制御装置は、変速中にエンジンから駆動輪への動力を切断するクラッチを有する自動変速機を搭載する車両の制御装置であって、ドライバに情報を報知する報知部と、車両の走行状態に基づいて自動変速機の変速条件の成立までの近さを予測する制御部と、を備え、制御部は、自動変速機の変速条件の成立までの近さが所定の閾値以内であると予測した場合、変速条件の成立が近いことを報知部によってドライバに報知することを特徴とする。これにより、本発明の一実施の形態に係る車両の制御装置は、ドライバビリティを向上させることができる。
以下、図1から図6を参照して、本発明の一実施例について説明する。図1に示すように、本発明の一実施例に係る車両の制御装置を搭載した車両10は、エンジン1、自動変速機4、アクセルペダルセンサ7、ブレーキペダルセンサ8、車速センサ9、駆動輪11、制御部6を含んで構成されている。
エンジン1は、吸気行程、圧縮行程、膨張行程及び排気行程からなる一連の4行程を行うとともに、圧縮行程及び膨張行程の間に点火を行い車両10の駆動力を発生させる4サイクルのガソリンエンジンによって構成されている。なお、エンジン1は、ディーゼルエンジンで構成されてもよい。
自動変速機4は、変速機構2と、クラッチ3と、アクチュエータ12とを備えている。変速機構2は、手動変速機に一般的に用いられる平行軸歯車式の変速機構として構成されており、常時噛み合い式の複数の変速ギヤを有する。
クラッチ3は、乾式単板クラッチとして構成されており、エンジン1のクランクシャフト1Aに連結されたフライホール3Aと、変速機構2の入力軸2Aに連結されたクラッチディスク3Bとを有する。クラッチ3は、変速機構2の変速段の切替え中(以下、単に変速中ともいう)は、エンジン1から駆動輪11への動力を切断する。
クラッチ3は、クラッチディスク3Bとフライホール3Aとが締結(接続)状態に切換えられた場合にエンジン1の動力を変速機構2に伝達し、開放状態に切換えられた場合にエンジン1から変速機構2への動力の伝達を切断(遮断)する。
アクチュエータ12は、電動アクチュエータまたは電動油圧アクチュエータとして構成されており、自動変速機4の変速操作を行うように駆動する。アクチュエータ12が行う変速操作には、クラッチ3を締結または開放するクラッチ断続操作と、変速機構2の変速段(ギヤ段)を切換える変速段切換操作とがある。アクチュエータ12は、制御部6に電気的に接続されており、制御部6からの制御信号によって制御される。このように、自動変速機4は、手動変速機の構造を元に変速操作を自動化したAMT(Automated Manual Transmission)により構成されている。
アクチュエータ12は図示しない変速アクチュエータを備えており、この変速アクチュエータにより変速段切換操作を行う。また、アクチュエータ12は図示しないクラッチアクチュエータを備えており、このクラッチアクチュエータによりクラッチ3を締結または開放する。詳しくは、クラッチアクチュエータは、自動変速機4の図示しないレリーズロッドを操作することで、変速段切換操作の前にクラッチ3を開放し、変速段切換操作の後にクラッチ3を締結する。
このように構成された車両10において、エンジン1から出力された回転は、自動変速機4で成立している変速段に応じた変速比で変速され、図示しないディファレンシャル装置と、左右のドライブシャフト11Aとを介して左右の駆動輪11に伝達される。
アクセルペダルセンサ7は、アクセルペダル7Aに設けられており、アクセルペダル7Aの踏み込み量を検出する。ブレーキペダルセンサ8は、ブレーキペダル8Aに設けられており、ブレーキペダル8Aの踏み込み量を検出する。
車速センサ9は、ドライブシャフト11Aに設けられており、このドライブシャフト11Aの回転速度に基づく車速を検出する。
アクセルペダルセンサ7、ブレーキペダルセンサ8および車速センサ9は、制御部6に電気的に接続されており、検出信号を制御部6に出力する。
本実施例では、車両10は、ドライバに情報を報知する報知部20を備えている。詳しくは、報知部20は、運転席に設けられたインジケータランプとして構成されている。報知部20としてのインジケータランプは、ドライバに光によって情報を報知する。なお、報知部20は、アクセルペダル7Aまたはシートを振動させる振動発生装置、または、アクセルペダル7Aの反力を調整する反力調整装置であってよく、かかる構成であれば目視する必要がないため、ドライバは運転中に前方への注意を維持することができる。
制御部6は、CPU(Central Processing Unit)と、RAM(Random Access Memory)と、ROM(Read Only Memory)と、フラッシュメモリと、入力ポートと、出力ポートとを備えたコンピュータユニットによって構成されており、制御対象を電気的に制御する。すなわち、制御部6は、ECU(Electronic Control Unit)から構成されている。
制御部6のROMには、各種制御定数や各種マップ等とともに、当該コンピュータユニットを制御部6として機能させるためのプログラムが記憶されている。すなわち、制御部6において、CPUがROMに記憶されたプログラムを実行することにより、当該コンピュータユニットは、制御部6として機能する。
制御部6の入力ポートには、上述したアクセルペダルセンサ7、ブレーキペダルセンサ8および車速センサ9等の各種センサ類が接続されている。
制御部6の出力ポートには、エンジン1と、自動変速機4のアクチュエータ12とが接続されている。制御部6は、各種センサ類の検出情報に基づいてエンジン1と自動変速機4を制御する。
ここで、本実施例の車両10は、自動変速機4の変速動作中(以下、単に変速中ともいう)は、クラッチ3が切断されることでエンジン1と駆動輪11との間の動力伝達が遮断され、いわゆるトルク抜けという状態が発生する。この変速動作に伴うトルク抜けは、カーブ路の走行中などの車両10の走行状態によってはドライバビリティを損なうことがある。また、通常は変速動作に伴うトルク抜けの発生タイミングをドライバが知ることをできないため、ドライバの心理的負担になることがある。
そこで、本実施例において、制御部6は、車両10の走行状態に基づいて自動変速機4の変速条件の成立までの近さを予測する。そして、制御部6は、自動変速機4の変速条件の成立までの近さが所定の閾値以内であると予測した場合、変速条件の成立が近いことを報知部20によってドライバに報知する。また、制御部6は、報知部20によるドライバへの報知を、変速条件の成立までの近さに応じて異なる報知態様で行う。
例えば、制御部6は、図4に示すダウンシフト変速マップまたは図5に示すアップシフト変速マップを参照し、変速条件の成立までの近さを予測する。図4、図5において、縦軸はアクセル開度を示し、横軸は車速を示している。図4は、3速から2速に変速段のダウンシフトを行う場合の変速マップを示し、図5は、3速から4速に変速段のアップシフトを行う場合の変速マップを示している。図4、図5の変速マップにおいて、アクセル開度と車速との組み合わせからなる変速線が設定されており、制御部6は、アクセル開度または車速の組み合わせがこの変速線を横断する場合に、変速条件が成立したと判断して変速を行う。制御部6には、全ての変速段の変速マップが記憶されている。
制御部6は、図4のダウンシフト変速マップまたは図5のアップシフト変速マップを参照し、現在のアクセル開度および車速から特定される点(図中、黒丸で記す)から変速線までの変速間隔Aを、変速条件の成立までの近さとして予測する。この変速間隔Aは、現在のアクセル開度が維持された場合の現在の車速から変速線までの速度差であり、変速間隔Aが小さいほど変速条件の成立が近くなる。このように、本実施例では、変速マップ上の変速線までの変速間隔Aを用いることで、変速条件の成立までの近さを定量化している。なお、変速間隔Aの値に代わって、変速が行われるまでの予測時間(例えば、2秒後)によって変速条件の成立までの近さを表してもよい。
また、制御部6は、図6に示す報知態様マップを参照し、報知部20の報知態様としての通知周期を決定する。報知態様マップは制御部6に記憶されている。図6において、縦軸は通知周期を示し、横軸は変速間隔A(図中、間隔Aと記す)を示している。通知周期とは、報知部20がインジケータランプから構成される場合は、インジケータランプの一秒当たりの点灯回数(Hz)である。この報知態様マップにおいて、変速間隔Aが小さいほど、通知周期が大きくなり、インジケータランプの一秒当たりの点灯回数が増大している。なお、報知態様マップの縦軸は、シートの振動強度または振動周期であってもよく、アクセルペダル7Aの反力の大きさまたは振動周期であってもよい。また、変速間隔Aが小さいほど通知周期、振動強度または振動周期を小さくしてもよい。報知部20による報知動作のON(報知する)またはOFF(報知しない)がドライバによって選択できるようになっていてもよい。
次に、図2を参照して、本実施例に係る制御部6によって実行される変速タイミング報知動作の流れについて説明する。この変速タイミング報知動作は所定の短い周期で繰り返し実行される。
図2に示すように、制御部6は、変速予測を行う(ステップS1)。ここでは、制御部6は、現在のアクセル開度および車速に基づいて、変速マップ上の変速線までの変速間隔を演算する。
次いで、制御部は、変速間隔が所定の閾値以下か否かを判別し(ステップS2)、変速間隔が閾値以下ではない場合(ステップS2でNO)は、今回の動作を終了する。
一方、変速間隔が閾値以下の場合(ステップS2でYES)、制御部6はインジケータ制御処理を行い(ステップS3)、その後に今回の動作を終了する。
図3に示すように、インジケータ制御処理において、制御部6は、自動変速機4が変速中か否かを判別し(ステップS11)、変速中である場合はインジケータランプを点灯し(ステップS12)、変速中でない場合はインジケータランプを点滅させる(ステップS13)。
以上説明したように、本実施例では、車両10は、ドライバに情報を報知する報知部20と、車両の走行状態に基づいて自動変速機4の変速条件の成立までの近さを予測する制御部6と、を備えている。そして、制御部6は、自動変速機4の変速条件の成立までの近さが所定の閾値以内であると予測した場合、変速条件の成立が近いことを報知部20によってドライバに報知する。
これにより、変速条件の成立が近いことがドライバに報知されるので、ドライバは、変速動作に伴うトルク抜けを考慮して運転ができる。また、変速条件の成立が近い時点で報知が行われるので、ドライバはアクセル操作またはブレーキ操作の操作量を変更する等、状況に対応した運転を行うことで、変速動作のタイミングを早めたり遅くしたり、変速の発生を回避する等の対応ができる。
例えば、一定のアクセル開度で上り坂を走行中にカーブの手前で車速が減速し、ダウンシフトの成立が近づいた場合、ダウンシフトが発生することが前もってドライバに報知される。この場合、ドライバはカーブの手前で変速動作を終了できるようにアクセルペダル7Aを踏み足すことにより、カーブ中に変速動作が行われてトルク抜けが発生することを防止できる。
また、エンジンブレーキが作動するように小さなアクセル開度で下り坂を走行中に車速が上昇し、アップシフトの成立が近づいた場合、アップシフトが発生することが前もってドライバに報知される。この場合、ドライバはブレーキを踏んで車速の上昇を防止することにより、アップシフトに伴うトルク抜けを防止でき、トルク抜けによるエンジンブレーキの中断を防止できる。
この結果、ドライバビリティを向上させることができる。
また、本実施例では、制御部6は、自動変速機4の変速条件の成立までの近さが所定の閾値以内であると予測した場合、変速条件の成立が近いことを、変速条件の成立までの近さに応じて異なる報知態様で報知部20によってドライバに報知する。
これにより、ドライバは、変速が発生するタイミングを正確に認識できる。そのため、ドライバの予期せぬタイミングで変速およびトルク抜けが発生することを防止できる。
また、ドライバは、変速条件の成立までの近さを認識できるので、アクセル操作またはブレーキ操作の操作量を変更する等、状況に対応した運転を行うことで、変速動作のタイミングを早めたり遅くしたり、変速の発生を回避する等の対応ができる。
例えば、ドライバは、カーブまでの距離と変速条件の成立までの近さを考慮して、カーブ前に変速を完了するか、カーブ後に変速させるかの判断を行うことができる。詳しくは、上り坂で車速が低下した場合、ドライバは、アクセルペダル7Aを踏み足して車速を増加させることによりダウンシフトを防止できるが、車両10の走行条件、上り坂の勾配、またはアクセルペダル7Aを踏み足し量によっては、逆にキックダウンによるダウンシフトを引き起こすおそれがある。このような状況でも、変速条件成立までの近さが分かることにより、ドライバは予期せぬタイミングでのダウンシフトによるトルク抜けを防止できる。
また、ドライバが走行中に前方に黄色の信号機を見たのでアクセルペダル7Aから一気に足を離して車速を落とそうと考えたときに、アップシフトが近いことが報知された場合、ドライバは、徐々にアクセルペダル7Aを弱めることにより、変速条件の成立がさらに近づくことを回避し、信号機での停車前に無用なアップシフトが発生することを防止できる。
上述の通り、本発明の実施例を開示したが、当業者によっては本発明の範囲を逸脱することなく変更が加えられうることは明白である。すべてのこのような修正及び等価物が次の請求項に含まれることが意図されている。
4 自動変速機
6 制御部
10 車両
20 報知部
6 制御部
10 車両
20 報知部
Claims (2)
- 変速中にエンジンから駆動輪への動力を切断するクラッチを有する自動変速機を搭載する車両の制御装置であって、
ドライバに情報を報知する報知部と、
車両の走行状態に基づいて前記自動変速機の変速条件の成立までの近さを予測する制御部と、を備え、
前記制御部は、前記自動変速機の変速条件の成立までの近さが所定の閾値以内であると予測した場合、前記変速条件の成立が近いことを前記報知部によってドライバに報知することを特徴とする車両の制御装置。 - 前記制御部は、前記変速条件の成立までの近さが所定の閾値以内であると予測した場合、前記変速条件の成立が近いことを、前記変速条件の成立までの近さに応じて異なる報知態様で前記報知部によってドライバに報知することを特徴とする請求項1に記載の車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021021245A JP2022123739A (ja) | 2021-02-12 | 2021-02-12 | 車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021021245A JP2022123739A (ja) | 2021-02-12 | 2021-02-12 | 車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022123739A true JP2022123739A (ja) | 2022-08-24 |
Family
ID=82940438
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021021245A Pending JP2022123739A (ja) | 2021-02-12 | 2021-02-12 | 車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022123739A (ja) |
-
2021
- 2021-02-12 JP JP2021021245A patent/JP2022123739A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5565324B2 (ja) | 車両制御装置 | |
| US20140019021A1 (en) | Vehicle control device | |
| JP2009047216A (ja) | 車両用変速機の変速制御装置 | |
| CN102361787A (zh) | 驱动力控制装置 | |
| JP2010241376A (ja) | 車両の制御装置 | |
| KR20000053503A (ko) | 자동 변속기의 다운시프트 제어 방법 및 시스템 | |
| JP5999323B2 (ja) | 自動変速機の変速制御装置 | |
| EP2607670B1 (en) | Control device for vehicle engine | |
| JP6551647B2 (ja) | 車両の走行制御装置 | |
| JPH11193866A (ja) | 自動変速機のニュートラル制御装置 | |
| JP5958698B2 (ja) | 自動変速機の変速制御装置 | |
| JP4538306B2 (ja) | 車両用自動変速機の変速制御方法及びシステム | |
| JP4687164B2 (ja) | 変速機の制御装置 | |
| JP2006057691A (ja) | 自動変速機の変速制御装置 | |
| JP5892146B2 (ja) | 車両の制御装置 | |
| JP2022123739A (ja) | 車両の制御装置 | |
| JP2016210376A (ja) | 車両の変速指示装置 | |
| US12246712B2 (en) | Vehicle constant speed travel control method and vehicle constant speed travel control device | |
| US20140330494A1 (en) | Device for controlling automatic transmission | |
| JP2020133754A (ja) | 自動変速制御装置 | |
| JP2016114191A (ja) | 車両用変速システム | |
| JP4778338B2 (ja) | クリープ制御装置 | |
| CN102834635A (zh) | 手动变速器的换档判定装置 | |
| JP2018058495A (ja) | 車両の制御装置 | |
| JP7743814B2 (ja) | 車両の制御装置 |