JP2023045794A - 顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム - Google Patents
顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム Download PDFInfo
- Publication number
- JP2023045794A JP2023045794A JP2021154368A JP2021154368A JP2023045794A JP 2023045794 A JP2023045794 A JP 2023045794A JP 2021154368 A JP2021154368 A JP 2021154368A JP 2021154368 A JP2021154368 A JP 2021154368A JP 2023045794 A JP2023045794 A JP 2023045794A
- Authority
- JP
- Japan
- Prior art keywords
- magnification
- image
- microscope
- operation means
- movable portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





































Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
- G02B21/26—Stages; Adjusting means therefor
Landscapes
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Microscoopes, Condenser (AREA)
Abstract
【課題】顕微鏡を用いて観察される対象物をカメラで撮像する際に、対象物に対する総合倍率を迅速に取得可能にし、総合倍率を利用した制御が可能な顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラムを提供することを目的とする。【解決手段】顕微鏡補助装置110は、顕微鏡100の視野内で対象物103を操作する操作手段10を移動させる操作手段可動部1と、視野内の画像を取得する画像処理回路2dと、操作手段可動部1を制御する制御部2とを備える。画像処理回路2dは、操作手段可動部1で操作手段10を対物レンズ201の光軸方向以外の方向に移動させた際、その移動前の第1画像と移動後の第2画像とを取得する。制御部2は、第1画像での操作手段10の位置と、第2画像での操作手段10の位置と、移動時の操作手段10の移動量とに基づいて、対象物103をカメラ106で撮像する際の倍率としての総合倍率Mを取得する。【選択図】図1A
Description
本発明は、顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラムに関する。
ライフサイエンス分野や微細加工分野では、顕微鏡の視野下で、例えば細胞を選り分ける作業、体外授精のために卵子の中に精子を注入する作業、プローブにより微小部分の電位を測定する作業、半導体基板に混入した異物をピックアップする作業等が行われる。このような作業を補助するために、顕微鏡には、一般的に「マイクロマニピュレータ」または単に「マニピュレータ」等と呼ばれる顕微鏡補助装置が装着される。顕微鏡補助装置は、顕微鏡の視野下で観察される対象物に対して機械的操作を行うピペット、プローブ、ピンセット等の操作手段を移動させる操作手段可動部を有する。操作手段可動部としては、例えば、顕微鏡および顕微鏡補助装置の使用者(作業者)による手動の操作を、メカ機構や流体圧力を介して、機械的に変換するものがある。また、その他、操作手段可動部としては、モータ等を利用する電動のものもある。このような操作手段可動部により、操作手段を3次元方向に移動させることができる。また、顕微鏡補助装置は、カメラで顕微鏡視野を撮像しつつ、操作手段可動部の動作をコンピュータの指示によって実行することも可能になる。
近年では、電動のアクチュエータの動作を、カメラの画像情報に基づいて制御するビジュアルフィードバックが知られている。ビジュアルフィードバックは、例えば、ロボットの制御の分野で広く用いられている。ビジュアルフィードバックで制御する場合、画像内の画素間の距離と、実際の(現実の)3次元空間の距離との関係が既知である必要がある。そのためには、顕微鏡の撮像系、すなわち、カメラの仕様と光学倍率とが既知である必要がある。カメラの仕様と光学倍率とが変更されなければ、使用者が手入力でカメラの仕様および光学倍率を装置に登録するようにしても、作業時の利便性が大きく損なわれることはないと考えられる。しかしながら、顕微鏡補助装置を用いた作業では、対物レンズが複数装着されたレボルバによって、頻繁に対物レンズを変更して作業をすることがある。この場合、対物レンズを変更する度に、使用者が手入力で光学倍率等を登録するのは煩雑となり、現実的ではない。また、対物レンズとカメラの光路との間にアダプタを装着する場合もある。このアダプタには、光学素子が内蔵され、カメラに写る像の倍率を変更可能な光学アダプタもある。レボルバは、電子化されているものもあるが、光学アダプタが電子化されていることは稀であり、対象物をカメラで撮像する総合倍率の情報を自動的に(電気的に)取得することは困難である。そのため、顕微鏡補助装置では、総合倍率(光学倍率等)を検出する検出デバイスを追加することなく、自動的に総合倍率を取得する方法が求められる。特許文献1には、顕微鏡のレボルバに装着されている複数の対物レンズの倍率を推定する技術が開示されている。
特許文献1に記載された発明は、対物レンズが変更された際には、その変更を、顕微鏡視野の撮像によって得られた画像の暗転で判断するよう構成されている。しかしながら、このような構成では、例えば、画像暗転後に対物レンズを変更せずに元の位置に戻したり、顕微鏡の照明を暗くしたりした場合に、対物レンズの倍率の推定が正しく行われない可能性がある。また、特許文献1には、光学アダプタについては何ら開示も示唆もされていない。このため、特許文献1に記載された発明では、対象物をカメラで撮像する総合倍率を自動的に取得することができず、また、総合倍率を利用した制御もすることができない。
そこで、本発明の目的は、顕微鏡を用いて観察される対象物をカメラで撮像する際に、対象物に対する総合倍率を迅速に取得可能にし、総合倍率を利用した制御が可能な顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラムを提供することである。
上記目的を達成するために、本発明の顕微鏡補助装置は、複数の対物レンズと、対物レンズを介した視野内の画像を撮像可能なカメラが装着されるマウント部と、を有する顕微鏡に装着して用いられる顕微鏡補助装置であって、視野内で対象物を操作する操作手段に接続され、操作手段を移動させることが可能な操作手段可動部と、カメラから画像を取得する画像処理手段と、操作手段可動部、画像処理手段の作動を制御する制御手段と、を備え、画像処理手段は、操作手段可動部によって操作手段を対物レンズの光軸方向以外の方向に移動させた際、その移動前の第1画像と、移動後の第2画像とをカメラから取得し、制御手段は、第1画像での操作手段の像の位置と、第2画像での操作手段の像の位置と、移動時の操作手段の移動量とに基づいて、対象物をカメラで撮像する際の倍率としての総合倍率を取得する総合倍率取得機能を有することを特徴とする。
本発明によれば、顕微鏡を用いて観察される対象物をカメラで撮像する際に、対象物に対する総合倍率を迅速に取得可能にし、総合倍率を利用した制御が可能となる。
以下、本発明の各実施形態について図面を参照しながら詳細に説明する。しかしながら、以下の各実施形態に記載されている構成はあくまで例示に過ぎず、本発明の範囲は各実施形態に記載されている構成によって限定されることはない。
<第1実施形態>
以下、図1~図10を参照して、第1実施形態について説明する。本実施形態では、顕微鏡システムが主にライフサイエンス分野で細胞等を操作するのに使用される場合を例にして説明する。また、説明のためにXYZ座標系を設定する(想定する)。顕微鏡の光軸方向で、使用者(作業者)から見て鉛直方向上方を正とするZ方向、光軸方向に直交し、使用者から見て右方向を正とするX方向、使用者から見て奥行方向を正とするY方向とする。また、後述するコントローラ30によって、焦点が合っていると判断されるZ方向の距離を「焦点深度」として定義する。焦点深度は、対物レンズ201の焦点位置を中心にプラス方向とマイナス方向で幅を有しており、対物レンズ201の種類によって変化する。図1Aは、顕微鏡および顕微鏡補助装置を有する顕微鏡システムの第1実施形態を示す正面図である。図1Bは、図1Aに示す顕微鏡システムが有する顕微鏡の右側面図である。図1Cは、図1Aに示す顕微鏡システムが有する顕微鏡補助装置と通信可能なPC(パーソナルコンピュータ)のブロック図である。
以下、図1~図10を参照して、第1実施形態について説明する。本実施形態では、顕微鏡システムが主にライフサイエンス分野で細胞等を操作するのに使用される場合を例にして説明する。また、説明のためにXYZ座標系を設定する(想定する)。顕微鏡の光軸方向で、使用者(作業者)から見て鉛直方向上方を正とするZ方向、光軸方向に直交し、使用者から見て右方向を正とするX方向、使用者から見て奥行方向を正とするY方向とする。また、後述するコントローラ30によって、焦点が合っていると判断されるZ方向の距離を「焦点深度」として定義する。焦点深度は、対物レンズ201の焦点位置を中心にプラス方向とマイナス方向で幅を有しており、対物レンズ201の種類によって変化する。図1Aは、顕微鏡および顕微鏡補助装置を有する顕微鏡システムの第1実施形態を示す正面図である。図1Bは、図1Aに示す顕微鏡システムが有する顕微鏡の右側面図である。図1Cは、図1Aに示す顕微鏡システムが有する顕微鏡補助装置と通信可能なPC(パーソナルコンピュータ)のブロック図である。
図1Aに示すように、顕微鏡システム1000は、顕微鏡100および顕微鏡補助装置110を有する。顕微鏡100は、照明光学系101および観察光学系104を有し、上部の照明光学系101で、透明のシャーレ102に置かれた対象物103を照明しつつ、下部の観察光学系104で、対象物103を観察するものである。観察光学系104は、複数の対物レンズ201と、各対物レンズ201が装着されたレボルバ200を有する。本実施形態では、対物レンズ201a、対物レンズ201b、対物レンズ201cの3種類の対物レンズ201がレボルバ200に装着されている(図2A、図2B参照)。そして、レボルバ200を回転操作することにより、対物レンズ201a~対物レンズ201cの中から所望の対物レンズ201に切り替えて変更する、すなわち、交換して用いることができる。なお、レボルバ200に装着される対物レンズ201の種類は、3種類に限定されず、例えば、2種類または4種類以上であってもよい。また、図1Bに示すように、観察光学系104は、接眼レンズ104bを有する。これにより、対象物103の光学像を、不図示のその他のレンズや屈折光学系を経由して、肉眼による観察を可能にしている。対象物103に対する焦点位置は、レボルバ200ごと対物レンズ201をZ方向に移動させることで調整する。この調整は、顕微鏡100に設けられたノブ105を回転することで行われる。ノブ105の回転量は、不図示の減速伝達機構を介して、対物レンズ201の微小移動量に変換される。
顕微鏡100は、カメラ106が着脱自在に装着される顕微鏡マウント(マウント部)109を有する。カメラ106は、対物レンズ201を介した視野内の画像を撮像可能である。また、顕微鏡マウント109は、例えばカメラ106の種類よっては、カメラ106の装着が不可となる場合がある。本実施形態では、一例として、カメラ106は、顕微鏡マウント109への装着に適合しないものとなっている。この場合、顕微鏡マウント109には、光学アダプタ107が装着される。これにより、顕微鏡マウント109は、光学アダプタ107を介して、カメラ106が装着可能となる。なお、光学アダプタ107は、カメラ106で撮像される画像の倍率を変更するための光学素子を有する顕微鏡補助装置110のメモリ(記憶手段)2cには、光学アダプタの倍率Uを記憶可能である。
顕微鏡補助装置110は、顕微鏡100に装着して用いられるマイクロマニピュレータ(マニピュレータ)である。図1Aに示すように、顕微鏡補助装置110は、少なくとも1つの操作手段可動部1と、コントローラ30と、を有する。
操作手段可動部1は、一般的には、顕微鏡100の光軸の左右両側、または、片側に配置される。本実施形態では、操作手段可動部1は、顕微鏡システム1000の使用者から見て右側に配置されている。操作手段可動部1は、顕微鏡100の視野内で対象物103を操作する操作手段10に接続される。そして、使用者は、操作手段可動部1を操作することによって、操作手段10を所望の方向、すなわち、X方向、Y方向、Z方向の各方向に移動させることができる。なお、操作手段可動部1は、操作手段10を回転可能に構成されていてもよい。また、操作手段可動部1は、粗調整用として、操作手段10を高速に移動させる高速駆動機構と、微調整用として、操作手段10を高分解能で移動させる高分解能駆動機構とを有していてよい。また、操作手段可動部1には、不図示のエンコーダが内蔵されている。これにより、X方向、Y方向、Z方向の各方向の操作手段10の移動量を取得することができる。本実施形態では、操作手段10の移動量を、操作手段可動部1に内蔵されたエンコーダから取得することとしているが、これに限定されない。例えば、ステッピングモータのようにオープンループ制御で駆動する場合には、エンコーダで位置情報を取得しなくてもよい。また、エンコーダの設置箇所としては、操作手段可動部に限定されない。
図1Aに示すように、コントローラ30は、CPU2aおよび駆動回路2bを有し、制御手段としての制御部2と、記憶手段としてのメモリ2cと、画像処理手段としての画像処理回路2dと、入力読取手段としての入力読取回路2eと、を有する。
制御部2は、操作手段可動部1、メモリ2c、画像処理回路2dおよび入力読取回路2eと電気的に接続され、これらの作動を制御するコンピュータである。また、メモリ2cには、顕微鏡補助装置110の各回路(各手段)の制御をCPU2a(制御部2)に実行させるためのプログラムが予め記憶されている。駆動回路2bは、操作手段可動部1の駆動機構を駆動するための回路である。画像処理回路2dは、カメラ106から画像を取得して、画像処理を行う(画像処理工程)。また、コントローラ30は、画像処理回路2dを介して、外部の表示装置108と電気的に接続されている。これにより、コントローラ30は、表示装置108に向けて、画像を出力することができる。そして、表示装置108には、この画像が表示される。入力読取回路2eは、入力手段20からの入力情報を読み取る(入力読取工程)。入力手段20からの入力情報としては、例えば、操作手段可動部1の動作停止命令、動作開始命令および目標位置に関する情報等がある。なお、入力手段20は、操作手段可動部1に対する動作指示を入力する装置であり、例えば、ジョイスティックで構成される。ジョイスティックの上端部を前後左右に変位させることで、操作手段可動部1に対するX方向、Y方向の移動量を入力することができる。また、ジョイスティックの上端部を回転させることで、操作手段可動部1に対するZ方向の移動量を入力することができる。ジョイスティックは、本実施形態では下端部が支持され、上端部を操作するよう構成されているが、これに限定されない。例えば、ジョイスティックは、上端部が支持され、下端部を操作するように吊り下げられた構成であってもよいし、ボタンやダイヤル、その他、タッチパネル等で構成されていてもよい。
また、コントローラ30は、PC40と電気的に接続されている。PC40は、顕微鏡補助装置110と連携して動作する計算装置である。このPC40は、コントローラ30からデータ(情報)を受信して、各種データ処理や各種判断等を行うことができる。また、PC40は、コントローラ30へデータを送信することもできる。本実施形態では、カメラ106で撮像された画像のデータや、入力手段20から入力された移動量のデータ等は、コントローラ30で受信されるが、これに限定されず、例えば、PC40で受信されてもよい。図1Cに示すように、PC40は、CPU400と、RAM等の一次記憶装置401と、ハードディスク等の二次記憶装置402と、を有する。二次記憶装置402には、CPU400を作動させるプログラムが記憶されている。一次記憶装置401には、二次記憶装置402から読み込まれたプログラムが記憶される。PC40は、PC操作部403と電気的に接続されている。表示装置108には、PC40に対するアプリケーションの表示や対話的な操作のための文字表示等が表示される。PC操作部403は、PC40に対する使用者の操作を受け付けるためキーボードやマウスである。
以上のような構成の顕微鏡補助装置110は、手動移動モード(第1移動モード)と、自動移動モード(第2移動モード)とが設定されている。手動移動モードは、入力手段20を介して、すなわち、入力手段20に連動させて操作手段可動部1を動作させるモードである。この手動移動モードでは、使用者は、接眼レンズ104bを覗きながら、または、表示装置108の表示を見ながら、入力手段20を操作して、操作手段10を意図通りに移動させることができる。自動移動モードは、入力手段20から独立して、すなわち、入力手段20との連動なしに操作手段可動部1を動作させるモードである。この自動移動モードでは、操作手段可動部1は、予め設定されたプログラムに従って動作する。
図2Aは、図1Aに示す顕微鏡のレボルバおよび対物レンズの平面図(正面図)である。図2Bは、図1Aに示す顕微鏡のレボルバおよび対物レンズの側面図である。図2A、図2Bに示すように、対物レンズ201a~対物レンズ201cは、円盤状のレボルバ200に支持されている。また、対物レンズ201a~対物レンズ201cは、レボルバ200の中心軸(回転軸)O200に対して、異なる角度で傾斜している。そして、レボルバ200を中心軸O200回りに回転操作することにより、対物レンズ201a~対物レンズ201cのいずれかを、対象物103の観察に使用することができる。対物レンズ201a~対物レンズ201cの中で、対物レンズ201aの倍率は、最も低い低倍率である。対物レンズ201cの倍率は、最も高い高倍率である。対物レンズ201bの倍率は、対物レンズ201aの倍率と対物レンズ201cの倍率との間の中倍率である。使用者は、まず、対物レンズ201aを使用し、操作手段10を顕微鏡100の視野に導き焦点を合わせる。次いで、使用者は、対物レンズ201bを使用し、焦点を合わせ、さらに対物レンズ201cを使用し、焦点を合わせる。このように順々に対物レンズ201cの倍率を上げてゆく。そして、高倍率の対物レンズ201cを使用して対象物103に対して操作を実行する。以下では、対物レンズ201aの倍率をKa、対物レンズ201bの倍率をKb、対物レンズ201bの倍率をKcとする。また、対物レンズ201a~対物レンズ201cを区別しない場合、対物レンズ201の倍率を総称してKとする。また、光学アダプタ107の倍率Uと、対物レンズ201の倍率Kとの積を総合倍率Mとする。総合倍率Mは、対象物103をカメラ106で撮像する際の倍率である。
制御部2は、総合倍率Mを取得する総合倍率取得機能を有する。以下、総合倍率取得機能について説明する。図3Aは、視野内での操作手段の移動状態を示す図である。図3Aでは、視野範囲を二点鎖線で描いた円形で示し、移動前の操作手段10を実線で示し、移動後の操作手段10を二点鎖線で示す。図3Bは、カメラで撮像された画像上で操作手段の移動状態を示す図である。図3Bでも、図3A同様に、移動前の操作手段10を実線で示し、移動後の操作手段10を二点鎖線で示す。図3Cは、カメラの撮像素子の画素サイズを示す図である。図3Aに示すように、視野内のXY平面上で、操作手段10は、距離L(μm)分だけ移動する。これにより、図3Bに示すように、カメラ106で撮像された画像上では、操作手段10は、画素数でN画素(pixel)分だけ移動している。距離Lは、操作手段可動部1に内蔵されたエンコーダから取得可能である。画素数Nは、画像処理回路2dで取得した画像を処理することで取得可能である。また、図3Cに示すように、カメラ106の撮像素子の画素は、縦横の長さがそれぞれP(μm)の正方形をなしている。なお、この長さPは、カメラ106のセンササイズと画素数とから取得可能である。また、カメラ106の画素数は、画像処理回路2dで取得した画像から取得可能である。また、センササイズについては、例えば、使用者が直接入力して設定してもよいし、顕微鏡補助装置110のメモリ2cに予めカメラ106のセンササイズの情報を記憶させておいて、当該センササイズを使用者が選択して設定してもよい。距離L、総合倍率M、画素数N、長さPは、「L=MNP」と表すことができるため、総合倍率取得機能で取得される総合倍率Mは、下記式(1)となる。

以上のように、顕微鏡補助装置110では、総合倍率取得機能を実行するには、まず、操作手段可動部1によって操作手段10を、Z方向(対物レンズ201の光軸方向)以外の方向、すなわち、XY平面に沿って、例えば距離L分だけ移動させる。また、この移動の際に、カメラ106によって、操作手段10の移動前の画像(以下「第1画像」と言う)と、操作手段10の移動後の画像(以下「第2画像」と言う)とを撮像する。第1画像は、図3Bの実線で示す操作手段10が含まれる画像である。第2画像は、図3Bの二点鎖線で示す操作手段10が含まれる画像である。そして、画像処理回路2dは、第1画像および第2画像のデータをカメラ106から取得する(画像処理工程)。各画像のデータは、CPU2aに送信される。その後、CPU2aは、移動時の操作手段10の実移動量である距離Lと、その他に、画素数Nと、長さPとに基づいて、総合倍率Mを取得する。この総合倍率Mは、前述したように、式(1)により求められる。なお、画素数Nは、第1画像での操作手段10の像の位置と、第2画像での操作手段10の像の位置との差分を演算することによって得られる。このように、顕微鏡補助装置110によれば、顕微鏡100を用いて観察される対象物103をカメラ106で撮像する際に、対象物103に対する総合倍率Mを検出する検出デバイスを追加することなく、当該総合倍率Mを迅速に取得することができる。また、総合倍率Mを利用した制御、すなわち、総合倍率Mで対象物103の撮像を行うことができる。
メモリ2cには、対物レンズ201の倍率K(倍率Ka、倍率Kb、倍率Kc)と、光学アダプタの倍率Uとがそれぞれ記憶されている。また、メモリ2cには、倍率Kaと倍率Uとの積である総合倍率Ma、倍率Kbと倍率Uとの積である総合倍率Mb、倍率Kcと倍率Uとの積である総合倍率Mcがそれぞれ記憶されている。なお、各倍率は、PC40に記憶されていてもよい。そして、制御部2のCPU2aは、総合倍率取得機能で取得した総合倍率Mと、メモリ2cに記憶されている総合倍率Ma、総合倍率Mb、総合倍率Mcとを比較して、双方が同一であれば、総合倍率Mが変更されていないと判断することできる。一方、双方の差が所定よりも大きい場合には、対物レンズ201または光学アダプタ107が変更された(交換された)と判断することができる。このように、CPU2aは、対物レンズ201または光学アダプタ107の変更を検出する(検知する)変更検出手段としても機能する。そして、この変更が行われた、すなわち、検出された場合、当該変更後の総合倍率Mで対象物103の撮像を行うのが好ましい。
図4A~図4Dは、それぞれ、CPU2aで総合倍率取得機能が実行されるまでのフローチャートである。
図4Aに示すように、顕微鏡補助装置110の主電源をON状態として、顕微鏡補助装置110を起動させると、ステップS100に進む。ステップS100では、CPU2aは、使用者によって対物レンズ201が変更されたか否かの検知(検出)を行う。ステップS100での検知の結果、CPU2aが対物レンズ201の変更を検知した場合は、ステップS101に進んで、CPU2aが総合倍率取得機能を実行する。一方、対物レンズ201の変更が行われず、ステップS100でCPU2aが対物レンズ201の変更を検知しない場合には、対物レンズ201の変更が検知されるまで、ステップS100が繰り返される。ステップS101でCPU2aが総合倍率取得機能を実行した後も、対物レンズ201の変更が再度検知されるまで、ステップS100が繰り返される。このように、図4Aに示すフローチャートでは、CPU2aは、前述した変更検出機能(変更検出手段)によって対物レンズ201の変更を検出した場合に、総合倍率取得機能を実行する。これにより、例えば対物レンズ201の変更した旨の情報を使用者が顕微鏡補助装置110に入力せずとも、総合倍率Mを迅速に取得することができる。なお、図4Aに示すフローチャートは、顕微鏡補助装置110の主電源がON状態では常に実行され、主電源がOFF状態となったときには停止する。
図4Bに示すように、顕微鏡補助装置110の主電源をON状態として、顕微鏡補助装置110を起動させると、ステップS200に進む。ステップS200では、CPU2aは、手動移動モードから自動移動モードに遷移したか否かを検知する。ステップS200での検知の結果、CPU2aが、手動移動モードから自動移動モードへの遷移を検知した場合は、ステップS201に進んで、CPU2aが総合倍率取得機能を実行する。一方、手動移動モードから自動移動モードへの遷移が行われず、ステップS200でCPU2aが遷移を検知しない場合には、遷移が検知されるまで、ステップS200が繰り返される。ステップS201でCPU2aが総合倍率取得機能を実行した後も、手動移動モードから自動移動モードへの遷移が再度検知されるまで、ステップS200が繰り返される。このように、CPU2aは、手動移動モードから自動移動モードに遷移したか否かを検出可能する遷移検出手段として機能する。そして、図4Bに示すフローチャートでは、CPU2aは、手動移動モードから自動移動モードへの遷移を検出した場合に、総合倍率取得機能を実行する。これにより、例えば手動移動モードから自動移動モードへの遷移が行われた旨の情報を使用者が顕微鏡補助装置110に入力せずとも、総合倍率Mを迅速に取得することができる。なお、図4Bに示すフローチャートは、図4Aに示すフローチャートと同様に、顕微鏡補助装置110の主電源がON状態では常に実行され、主電源がOFF状態となったときには停止する。
図4Cに示すように、顕微鏡補助装置110の主電源をON状態として、顕微鏡補助装置110を起動させると、ステップS300に進む。ステップS300では、CPU2aは、操作手段10がカメラ106で撮像された画像に写っているか否かを判断する。ステップS300での判断の結果、CPU2aが、操作手段10が画像に写っていると判断した場合は、ステップS301に進む。一方、ステップS300での判断の結果、CPU2aが、操作手段10が画像に写っていないと判断した場合は、操作手段10が画像に写っていると判断するまで、ステップS300が繰り返される。ステップS301では、CPU2aは、操作手段10が画像に写るのが起動後1回目か否かを判断する。ステップS301での判断の結果、CPU2aが、操作手段10が画像に写るのが起動後1回目であると判断した場合は、ステップS302に進んで、CPU2aが総合倍率取得機能を実行する。一方、ステップS301での判断の結果、CPU2aが、操作手段10が画像に写るのが起動後1回目ではないと判断した場合は、フローを終了する。このように、図4Cに示すフローチャートでは、CPU2aは、操作手段10が画像内に写っていると判断し、その判断が顕微鏡補助装置110の起動後の1回目である場合に、総合倍率取得機能を実行する。これにより、使用者が操作手段10を使って作業をする前に、総合倍率Mを取得することができる。
図4Dに示すように、顕微鏡補助装置110の主電源をON状態として、顕微鏡補助装置110を起動させるとともに、手動モードに遷移すると、ステップS400に進む。ステップS400では、CPU2aは、操作手段可動部1を動作させたか否かを判断する。ステップS400での判断の結果、CPU2aが、操作手段可動部1を動作させたと判断した場合は、ステップS401に進む。一方、ステップS400での判断の結果、CPU2aが、操作手段可動部1を動作させていないと判断した場合は、ステップS403に進む。ステップS401では、CPU2aは、操作手段可動部1で操作手段10を移動させた距離(移動量)が所定の距離以上か否かを判断する。ステップS401での判断の結果、CPU2aが、操作手段10の移動距離が所定の距離以上であると判断した場合は、ステップS402に進んで、CPU2aが総合倍率取得機能を実行する。一方、ステップS401での判断の結果、CPU2aが、操作手段10の移動距離が所定の距離以上ではないと判断した場合は、ステップS403に進む。ステップS403では、CPU2aは、手動モードであるか否かを判断する。ステップS403での判断の結果、CPU2aが手動モードであると判断した場合は、ステップS400に戻り、以降のステップを順次実行する。ステップS403での判断の結果、CPU2aが手動モードではないと判断した場合は、フローを終了する。このように、図4Dに示すフローチャートでは、CPU2aは、手動移動モードで、操作手段可動部1による操作手段10の移動量が所定の距離以上であった場合には、総合倍率取得機能を実行する。これにより、使用者が操作手段10を手動で操作するタイミングを利用して、総合倍率Mを取得することができる。これにより、使用者は、総合倍率Mが現在どのようになっているかを気にせずに、対象物103の撮像作業を行うことができる。
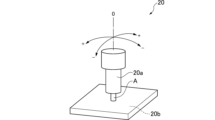
図5Aおよび図5Bは、総合倍率取得機能の実行下で、顕微鏡の視野内の操作手段を順に移動させる過程の一例を示す図である。図5Aおよび図5Bでは、操作手段可動部1および操作手段10が使用者の右側、すなわち、Xプラス側に配置されている。図5Aに示すように、対象物103は、顕微鏡100の視野内で、操作手段10のXマイナス側に配置されている。そして、この配置状態で、コントローラ30からの指示によって操作手段10をXマイナス側に移動させた際、操作手段10の移動量によっては、操作手段10が対象物103に接触する可能性がある。前述したように、本実施形態では、顕微鏡システム1000がライフサイエンス分野で細胞等を操作するのに使用される場合を例にしている。この場合、操作手段10として、先端10aが鋭利な棒状をなす部材が用いられることがあり、当該先端10aが対象物103に接触するのは好ましくない。特に、操作手段10の先端10aが対象物103を穿刺する方向、すなわち、Xマイナス方向に移動して、対象物103に接触するのは好ましくない。
そこで、本実施形態では、顕微鏡補助装置110は、総合倍率取得機能の実行において、操作手段10をZ方向以外の方向(XY平面方向)に移動させる場合に、Z方向と直交するXマイナス方向(一方向)への操作手段10の移動を規制可能に構成されている。以下、この移動規制構成について説明する。図5Aおよび図5Bでは、操作手段10の先端10aに対し、Xマイナス方向を領域Aとし、Xプラス方向を領域Bとしている。まず、図5Aに示す状態では、対象物103は、領域Aに配置され、操作手段10の先端10aからは離間している。図5Aに示す状態から操作手段10を領域B内のいずれかの方向に移動させると、図5Bに示す状態となる。図5Bに示す状態では、操作手段10の先端10aは、図5Aに示す状態よりもさらにXプラス方向に距離L分だけ移動している。そして、距離Lと、当該距離Lに対応する画素数N、すなわち、画像内で操作手段10を移動させた際の画素数Nとを取得して、式(1)によって総合倍率Mを演算する。また、操作手段10を図5Aに示す状態に戻す。このような移動規制構成により、操作手段10を自動で移動させて、総合倍率取得機能を実行する際に、操作手段10の先端10aが対象物103に接触するのを抑止することができる。これにより、操作手段10の先端10aが対象物103を穿刺するのを防止することができ、対象物103にとって安全な操作が可能となる。
なお、図5Bでは、距離Lを誇張して表現しているが、カメラ106の画素数と操作手段可動部1の分解能によっては、距離Lは、使用者が目視し難い長さとなることがある。このような場合も、移動規制構成の実行が可能である。また、図5Bでは、操作手段10を、対象物103と最も接触し難いXプラス方向に移動させているが、これに限定されず、Y方向にも移動させてもよい。
顕微鏡100は、対象物103を観察する際、対物レンズ201a、対物レンズ201b、対物レンズ201cのいずれかが用いられる。制御部2は、この観察で用いられている対物レンズ201の倍率Kを取得する対物レンズ倍率取得機能を有する。「対物レンズ倍率取得機能」とは、第1画像と第2画像とのデフォーカス量の変化量と、操作手段10の3次元空間での移動量とに基づいて、第1画像および第2画像の撮像に用いられた対物レンズ201の倍率を取得する機能のことである。なお、対物レンズ倍率取得機能での「第1画像(第1光軸方向移動画像)」とは、操作手段10のZ方向への移動前の画像のことであり、「第2画像(第2光軸方向移動画像)」とは、操作手段10のZ方向への移動後の画像のことである。以下、対物レンズ倍率取得機能について説明する。
図6Aは、顕微鏡の視野内での操作手段の平面図である。図6Bは、図6Aに示す操作手段の側面図である。図6Cは、図6Aに示す操作手段を撮像した画像から得られる、A-Aの箇所でのコントラストの変化を示すグラフである。図7Aは、顕微鏡の視野内で操作手段をZ方向に移動させた後の平面図である。図7Bは、図7Aに示す操作手段の側面図である。図7Cは、図7Aに示す操作手段を撮像した画像から得られる、B-Bの箇所でのコントラストの変化を示すグラフである。なお、図7Bでは、図6Bに示す状態の操作手段10を点線で示している。図7Cでは、図6Cに示すコントラストの変化を示すグラフを点線で示している。A-Aの箇所とB-Bの箇所とは、X方向の位置が同じである。また、ここでは、一例として、操作手段10は、ガラス製の円管で構成されていることとする。
対物レンズ倍率取得機能を実行する際には、総合倍率取得機能で総合倍率Mを取得した後に、まず、図6A、図6Bに示すように、焦点深度Dの中に操作手段10が存在している状態、すなわち、操作手段10の焦点が合った状態にする。このとき、図6Cに示すように、操作手段10のA-A部でのコントラストは、操作手段10の外周側でコントラストが高くなり、中央部でコントラストが低くなる。そして、図7A、図7Bに示すように、操作手段可動部1によって、操作手段10をZプラス方向に移動させてゆく。これにより、画像内の操作手段10がデフォーカスされて、図7Cに示すように、操作手段10のA-A部でのコントラストが全体的に低くなる。そして、操作手段10のデフォーカス量が所定の量になったときに、操作手段可動部1(操作手段10)のZ方向への移動を停止する。このときの操作手段可動部1の移動距離をZhとする(図7B参照)。
コントローラ30は、対物レンズ倍率取得機能を実行する際の操作手段可動部1の移動距離Zhを取得する。一般的に顕微鏡100の焦点深度、すなわち、デフォーカス方向に移動させたときの距離と、デフォーカス具合との関係は、ベレックの式で下記式(2)のように表すことができる。

なお、nは媒質の屈折率であり、空気の場合約1である。Mは総合倍率である。λは波長である。NAは開口数である。Wは許容される許容錯乱円の径であり、撮像素子の画素サイズ(長さP)と画像処理能力とで決まる値である。この径Wは、カメラ106のスペックごとにメモリ2cに記憶されていてもよい。また、式(2)中の波長λ、径Wの単位としては、全て「μm」を用いる。
式(2)をNAについて解くと
式(2)をNAについて解くと

となる。NAは0よりも大きいので

表すことができる。
式(3)により、対物レンズ201の開口数NAは、許容錯乱円の径W、総合倍率Mおよび焦点深度Dで表現されている。所定のデフォーカス量になるときの、Z方向の移動距離Zhが焦点深度DのE倍とすれば、

が成り立ち、開口数NAは、下記式(4)で表すことができる。

式(4)の右辺は、移動距離Zhの関数となるため、移動距離Zhが決まれば開口数NAが決まる。移動距離Zhと開口数NAとの関係は、顕微鏡補助装置110にカメラ106を装着し、開口数NAが既知の対物レンズ201を使用して、移動距離Zhの理想値をメモリ2cに記憶させておけばよい。開口数NAは、多少の誤差をもって求められるが、対物レンズ201の倍率Kによって離散的な値をとる。そのため、対物レンズ201aの倍率Ka、対物レンズ201bの倍率Kb、対物レンズ201b倍率をKcの中から、式(4)で算出された開口数NAに最も対応した倍率Kを選ぶのが好ましい。この選ばれた倍率Kを、対象物103の観察に用いられている、すなわち、顕微鏡100の光路にある対物レンズ201の倍率Kとして取得することができる。
制御部2は、光学アダプタ倍率取得機能を有する。「光学アダプタ倍率取得機能」とは、総合倍率取得機能によって取得された総合倍率Mと、対物レンズ倍率取得機能によって取得された対物レンズ201の倍率Kとに基づいて、光学アダプタ107の倍率Uを取得する機能である。以下、光学アダプタ倍率取得機能について説明する。図8は、対物レンズ201の倍率K、総合倍率M、開口数NA、移動距離Zhの関係の一例を示す表である。
図8に示すように、開口数NAが離散的な値をとるので、移動距離Zhの理想値も離散的な値をとる。例えば、径W=2μm、E=16.075であれば、移動距離Zhの理想値は、図8に示す値になる。そして、この値を、測定された移動距離Zhの値と比較することにより、対物レンズ201の開口数NAを判断し、当該開口数NAに対応した対物レンズ201の倍率Kを判断することが可能となる。この判断の結果を用いることにより、対物レンズ201のパラメータである開口数NAから倍率Kを求めることが可能となる。これにより、例えば、手動でパラメータ等を登録する(入力する)作業を間違う等の人的エラーを防止することが可能となる。また、対物レンズ201の倍率Kが求まり、総合倍率Mは総合倍率取得機能により取得済であるので、総合倍率Mを倍率Kで除することにより、光学アダプタ107の倍率Uも取得可能となる。なお、ここでは、倍率Uが1となる。このような光学アダプタ倍率取得機能により、従来は取得することが困難だった光学アダプタ107の倍率Uを容易に取得することができる。これにより、例えば、手動で倍率Uを登録する(入力する)作業を間違う等の人的エラーを防止することができる。
図9は、総合倍率取得機能が実行された後に行われる処理を説明するためのフローチャートである。図9に示すように、総合倍率取得機能の実行が完了すると、ステップS500に進む。総合倍率取得機能で取得した総合倍率をM1とする。また、メモリ2cで記憶され、現在光路にある対物レンズ201と光学アダプタ107とによる総合倍率をMとする。この場合、対物レンズ201aを用いた総合倍率をMaとし、対物レンズ201bを用いた総合倍率をMbとし、対物レンズ201cを用いた総合倍率をMcとする。ステップS500では、CPU2aは、総合倍率Mと総合倍率M1が一致するか否かを判断する。
ステップS500での判断の結果、CPU2aが、総合倍率Mと総合倍率M1が一致すると判断した場合には、フローを終了する。一方、ステップS500での判断の結果、CPU2aが、総合倍率Mと総合倍率M1が一致しないと判断した場合には、ステップS501に進む。ステップS501では、CPU2aは、総合倍率M1が、メモリ2cで記憶してある総合倍率Ma、総合倍率Mb、総合倍率Mcのいずれかと一致するか否かを判断する。ステップS501での判断の結果、CPU2aは、総合倍率M1が一致すると判断した場合には、ステップS502に進む。一方、ステップS501での判断の結果、CPU2aは、総合倍率M1が一致しないと判断した場合には、ステップS503に進む。
ステップS502では、CPU2aは、対物レンズ201が変更されたことを、表示装置108に報知させて(通知させて)、ステップS506に進む。この報知により、使用者は、対物レンズ201が変更されたことを把握することができる。ステップS503では、CPU2aは、例えば表示装置108を用いて、使用者に対し、対物レンズ201または光学アダプタ107を変更したか否かを確認する。CPU2aは、使用者が「変更した」を選択した場合、ステップS504に進み、使用者が「変更していない」を選択した場合、ステップS505に進む。
ステップS504では、CPU2aは、対物レンズ倍率取得機能または光学アダプタ倍率取得機能を実行する。CPU2aは、表示装置108を用いて、使用者に対し、変更した対物レンズ201または光学アダプタ107の情報を、PC操作部403で入力するように促す。この入力が完了したらフローを終了する。ステップS505では、CPU2aは、表示装置108を用いて、使用者に対し、総合倍率取得機能を再度実行するか否かを確認する。CPU2aは、使用者が「再度実行する」を選択した場合、ステップS507に進み、使用者が「再度実行しない」を選択した場合、ステップS504に進む。
ステップS506では、CPU2aは、対物レンズ倍率取得機能または光学アダプタ変更機能を実行し、使用者が倍率の入力作業を完了すると、メモリ2cに記憶している対物レンズ201、光学アダプタ107の情報を上書きしフローを終了する。ステップS507では、CPU2aは、総合倍率取得機能を実行しステップS500に戻る。
図10Aは、対物レンズ倍率取得機能が実行されるまでのフローチャートである。図10Aに示すように、対物レンズ倍率取得機能が一旦完了すると、ステップS600に進む。対物レンズ倍率取得機能によって取得された対物レンズ201の倍率Kが、メモリ2cに記憶された対物レンズ201のいずれの倍率Kとも一致しない場合、その旨を使用者に報知する(通知する)のが好ましい。
ステップS600では、CPU2aは、対物レンズ201の倍率Kを、メモリ2cで記憶している対物レンズ201aの倍率Ka、対物レンズ201bの倍率Kb、対物レンズ201cの倍率Kcと比較する。そして、CPU2aは、倍率Kが、倍率Ka、倍率Kb、倍率Kcのいずれかと一致するか否かを判断する。ステップS600での判断の結果、CPU2aが一致すると判断した場合には、フローを終了する。一方、ステップS600での判断の結果、CPU2aが一致すると判断しない場合には、ステップS601に進む。
ステップS601では、CPU2aは、メモリ2cで記憶している対物レンズの倍率Kと現在光路にある対物レンズ201の倍率Kが一致しないことを、報知手段としての表示装置108を用いて、使用者に対して報知し、ステップS602に進む。ステップS602では、CPU2aは、対物レンズ倍率取得機能を再度実行する。これにより、使用者は、現在光路にある対物レンズ201の倍率Kを対物レンズ倍率取得機能で取得することができる。そして、この取得された倍率Kが登録されて、フローが終了する。
以上のように、顕微鏡補助装置110は、対物レンズ倍率取得機能によって取得された倍率Kが、メモリ2cに記憶された倍率Ka~倍率Kcのいずれとも一致しないと、制御部2が判断した場合に、その旨を報知するよう構成されている。これにより、使用者がレボルバ200に装着された対物レンズ201のいずれかを交換した場合に、当該交換された対物レンズ201の倍率Kの登録作業を忘れたり、間違えたりすることを防止することができる。
図10Bは、光アダプタ倍率取得機能が実行されるまでのフローチャートである。光アダプタ倍率取得機能によって取得された光学アダプタ107の倍率U(以下「倍率U1」と言う)が、メモリ2cに記憶された光学アダプタの倍率Uと一致しない場合、その旨を使用者に報知するのが好ましい。図10Bに示すように、ステップS700では、CPU2aは、光学アダプタの倍率U1と、メモリ2cで記憶している光学アダプタの倍率Uと比較する。そして、CPU2aは、倍率U1と倍率Uとが一致するか否かを判断する。ステップS700での判断の結果、CPU2aが一致すると判断した場合には、フローを終了する。一方、ステップS700での判断の結果、CPU2aが一致しないと判断した場合には、ステップS701に進む。
ステップS701では、CPU2aは、メモリ2cで記憶している光学アダプタの倍率Uと、現在光路にある光学アダプタの倍率U1が一致しないことを、報知手段としての表示装置108を用いて、使用者に対し報知して、ステップS702に進む。ステップS702では、CPU2aは、光学アダプタ倍率取得機能を再度実行する。これにより、使用者は、現在光路にある光学アダプタの倍率U1を光学アダプタ倍率取得機能で取得することができる。そして、この取得された倍率U1が登録されて、フローが終了する。
以上のように、顕微鏡補助装置110は、光学アダプタ取得機能によって取得された光学アダプタ107の倍率Uが、メモリ2cに記憶された光学アダプタ107の倍率Uと一致しないと、制御部2が判断した場合に、その旨を報知するよう構成されている。これにより、使用者が顕微鏡100に装着された光学アダプタ107を交換した場合に、当該交換された光学アダプタ107の倍率Uの登録作業を忘れたり、間違えたりすることを防止することができる。
<第2実施形態>
以下、図11~図16Fを参照して、第2実施形態について説明する。本実施形態は、顕微鏡補助装置110が操作手段可動部1の移動速度を高速に変更可能に構成されていること以外は前記第1実施形態と同様である。
以下、図11~図16Fを参照して、第2実施形態について説明する。本実施形態は、顕微鏡補助装置110が操作手段可動部1の移動速度を高速に変更可能に構成されていること以外は前記第1実施形態と同様である。
第1実施形態と同様に、総合倍率Mは、対象物103をカメラ106で撮像する倍率である。従来の顕微鏡補助装置では、総合倍率Mを取得する総合倍率取得機能を有していない。この場合、使用者が対物レンズを切り替えた結果、総合倍率が変化しても、当該総合倍率が取得されない。操作手段可動部を移動させる際には、総合倍率に応じて、操作手段可動部1の移動速度を変更させるのが好ましいが、従来の顕微鏡補助装置では、操作手段可動部1の移動速度の変更も不可能であった。このため、総合倍率の高低に関わらず、すなわち、総合倍率が低倍率であっても、または、高倍率であっても、操作手段可動部は一定の速度で移動していた。そして、操作手段可動部が一定の速度で移動すると、当然に、操作手段も一定の速度で移動することとなる。しかしながら、操作手段の移動速度が一定であっても、表示装置に表示されるカメラからの電子画像や、接眼レンズを介して観察される光学像の中での、見かけの操作手段の移動速度は、高倍率の場合に速く、低倍率の場合に遅くなる。従って、使用者は、高倍率の場合に操作手段が速すぎると感じたり、低倍率の場合に操作手段が遅すぎると感じることがあった。
図11は、低倍率時および高倍率時の見かけの速度を説明するための図であり、(a)は対物レンズが10倍の顕微鏡視野で左側に操作手段10が見えている例であり、(b)は対物レンズが50倍の顕微鏡視野で左側に操作手段10が見えている例である。図11(a)と図11(b)とでは、倍率比が1:5であるので、例えば、図11(a)の矢印で示す距離を50μmとすると、図11(b)ので示す距離は10μmとなる。ここで、操作手段10が一定の速度で移動すると、図11(a)よりも図11(b)の方が見かけの速度が5倍速く見えてしまうので、図11(a)で遅すぎると感じたり、図11(b)で速すぎると感じる場合がある。そこで、本実施形態では、制御部2は、操作手段可動部1で操作手段10を移動させる移動速度を増加させる(高速にする)速度変更制御(変更制御)を行う。この速度変更制御は、総合倍率取得機能で取得された総合倍率Mが高倍率の場合に比べて低倍率の場合に、すなわち、総合倍率Mが所定値以下と判断した場合に、入力読取回路2eで読み取られた動作開始命令に応じて行われる。これにより、総合倍率Mの高低に関わらず、操作手段10の速すぎ、または、遅すぎを感じるのを防止することができる。具体的には、図11(b)での操作手段10の移動速度に対して、図11(a)での操作手段10の移動速度を5倍に設定すれば、図11(a)と図11(b)とで見かけの操作手段10の移動速度が等しくなる。このように、顕微鏡補助装置110は、対象物103をカメラ106で撮像する際の総合倍率Mを利用した速度変更制御が可能に構成されている。
以下、速度変更制御について詳細に説明する。使用者が操作手段可動部1を介して操作手段10を意図通りに移動させるのに際し、入力手段20への入力方法として、2つの方式がある。1つ目の方式は、操作手段可動部1の動作開始命令および動作停止命令の2つの命令を入力情報として受け付ける「二値入力方式」である。2つ目の方式は、操作手段可動部1の目標位置に比例した連続値を入力情報として受け付ける「連続値入力方式」である。なお、入力読取回路2eは、入力手段20からの各入力情報を読み取ることができる。
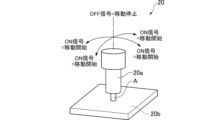
図12Aは、二値入力方式を説明するための図である。図12Bは、二値入力方式での動作を説明するためのタイミングチャートである。図12Bでは、(a)および(b)の横軸はいずれも時間経過を示し、(a)の縦軸はON信号とOFF信号の変化を示し、(b)の縦軸は操作手段10の位置の変化を示している。
図12Aに示す入力手段20は、レバー20aを有する。レバー20aは、外力付与しない自然状態では直立状態が維持され、使用者が操作することによって図示Aを支点として前後左右に倒すことが可能に構成されている。また、入力手段20は、レバー20aを前後左右に倒した場合に、各方向に倒れたことをON信号として検知可能なセンサ20bが内蔵されている。センサ20bは、レバー20aが直立状態では、OFF信号として検知可能になっている。入力手段20は、前後左右の各方向に倒れた際のON信号を当該各方向への動作開始命令とし、直立状態でのOFF信号を動作停止命令とする。入力読取回路2eは、入力手段20からの操作手段可動部1の動作開始命令(ON信号)および動作停止命令(OFF信号)の二値を入力情報として読み取ることができる。制御部2は、動作開始命令に応じて操作手段可動部1(操作手段10)の等速移動を開始し、動作停止命令に応じて操作手段可動部1を停止する。以下、このような制御を行うモードを「等速制御モード」と言う。また、等速制御モードでは、制御部2は、動作停止命令に応じて、操作手段可動部1を等速で移動させる際の移動速度を増加させる変更制御を行ってもよい。これにより、高速での等速移動が可能となる。
図12Bに示すように、時間T1のON信号で操作手段可動部1の移動を開始し、時間T2のOFF信号で操作手段可動部1の移動を停止する。時間T1から時間T2までは、操作手段可動部1が速度一定となる等速移動をする。本実施形態では、総合倍率Mに応じて、操作手段可動部1の移動速度を変化させるので、移動速度の大小によって、操作手段可動部1の移動距離(移動量)が図12Bの点線のように変化する。
図13は、二値入力方式での動作を説明するためのフローチャートである。ステップS801では、CPU2aが動作開始命令の有無を判断する。ステップS801での判断の結果、CPU2aが、動作開始命令があったと判断した場合には、ステップS802に進む。一方、ステップS801での判断の結果、CPU2aが、動作開始命令がないと判断した場合には、動作開始命令があったと判断するまで、ステップS801を繰り返す。ステップS802では、CPU2aは、操作手段可動部1の初期設定速度での移動を開始して、ステップS803に進む。この初期設定速度は、総合倍率Mを取得するために必要な微小移動をする際に設定される速度であり、予め設定されている。ステップS803では、CPU2aは、総合倍率取得機能によって総合倍率Mを取得して、ステップS804、ステップS805に順に進む。ステップS804では、CPU2aは、総合倍率Mに応じた操作手段可動部1の移動速度を決定する。移動速度の決定には、例えば、メモリ2cに予め記憶されている演算式やルックアップテーブル等を用いてもよい。ステップS805では、CPU2aは、ステップS804で決定した移動速度に変更する。ステップS806では、CPU2aは、動作停止命令の有無を判断する。ステップS806での判断の結果、CPU2aは、動作停止命令があったと判断した場合には、ステップS807に進む。ステップS807では、CPU2aは、操作手段可動部1の移動を停止させる。一方、ステップS806での判断の結果、CPU2aは、動作停止命令がないと判断した場合には、動作停止命令があったと判断するまで、ステップS806を繰り返す。二値入力方式は、本実施形態ではレバー20aを用いて行われているが、これに限定されず、例えば、入力手段20がダイヤルやボタンを有する場合であっても、ダイヤルやボタンを用いて行われる。以上ように、総合倍率Mを利用した、二値入力方式による速度変更制御が可能となる。これにより、総合倍率Mの高低に関わらず、使用者が操作手段10の速すぎ、または、遅すぎを感じるのを防止することができる。
次に、連続値入力方式について説明する。図14Aは、連続値入力方式の説明のための図である。図14Bは、連続値入力方式での動作を説明するためのタイミングチャートである。図14Bでは、(a)および(b)の横軸はいずれも時間経過を示し、(a)の縦軸は入力された連続値の変化を示し、(b)の縦軸は操作手段が追従する目標位置の変化を示している。
図14Aに示すように、入力手段20は、レバー20aを前方に倒した場合には、センサ20bがマイナスの値で検知し、その反対に、レバー20aを後方に倒した場合には、センサ20bがプラスの値で検知する。また、入力手段20は、レバー20aを左方に倒した場合には、センサ20bがマイナスの値で検知し、その反対に、レバー20aを右方に倒した場合には、センサ20bがプラスの値で検知する。また、レバー20aが直立状態にある場合には、センサ20bが0(零)の値で検知する。そして、入力読取回路2eは、入力手段20のセンサ20bから、操作手段可動部1の目標位置に比例した連続値(連続した信号)が入力される(図14(a)参照)。制御部2は、操作手段可動部1に対し、入力読取回路2eで読み取られた連続値に所定の倍率を乗じて演算された目標位置へ追従させる制御を行うことができる。以下、このような制御を行うモードを「追従制御モード」と言う。従って、制御部2は、追従制御モードと、前述した等速制御モードとに設定可能である。
図14Bに示すように、追従制御では、時間T1でプラス方向の連続値が入力され、時間T2でマイナス方向に転換して、そのままマイナス方向の連続値が入力される。その後、時間T3で再度プラス方向に転換して、そのままプラス方向の連続値が入力される。そして、各連続値に所定の倍率を乗じることにより、目標位置へ追従する。本実施形態では、総合倍率Mに応じて、目標位置を演算する倍率を変化させるので、当該倍率の大小によって、操作手段可動部1の移動距離(移動量)が図14Bの点線のように変化する。このとき、操作手段可動部1の単位時間当たりの移動距離、すなわち、操作手段可動部1の移動速度も変化することとなり、特に、移動速度の増加が可能となる。
図15は、連続値入力方式での動作を説明するためのフローチャートである。ステップS901では、CPU2aが連続値の入力の有無を判断する。ステップS901での判断の結果、CPU2aが、連続値の入力があったと判断した場合には、ステップS902に進む。一方、ステップS901での判断の結果、CPU2aが、連続値の入力がないと判断した場合には、連続値の入力があったと判断するまで、ステップS901を繰り返す。ステップS902では、CPU2aは、ステップS902で初期倍率で演算した移動速度での移動を開始して、ステップS903に進む。この初期倍率は、総合倍率Mを取得するために必要な微小移動をする間に設定する倍率であり、所定の倍率が予め設定されている。ステップS903では、CPU2aは、総合倍率取得機能によって総合倍率Mを取得して、ステップS904、ステップS905に順に進む。ステップS904では、CPU2aは、総合倍率Mに応じた倍率を決定する。倍率の決定には、例えば、メモリ2cに予め記憶されている演算式やルックアップテーブル等を用いてもよい。ステップS905では、CPU2aは、ステップS904で決定した倍率に変更する。ステップS906では、CPU2aは、連続値の入力終了の有無を判断する。ステップS906での判断の結果、CPU2aは、連続値の入力終了があったと判断した場合には、ステップS907に進む。ステップS907では、CPU2aは、操作手段可動部1の移動を停止させる。一方、ステップS906での判断の結果、CPU2aは、連続値の入力終了がないと判断した場合には、連続値の入力終了があったと判断するまで、ステップS906を繰り返す。連続値入力方式は、本実施形態ではレバー20aを用いて行われているが、これに限定されず、例えば、入力手段20がダイヤルやボタンを有する場合であっても、ダイヤルやボタンを用いて行われる。以上ように、連続値入力方式でも、二値入力方式同様に、総合倍率Mを利用した速度変更制御が可能となる。これにより、総合倍率Mの高低に関わらず、使用者が操作手段10の速すぎ、または、遅すぎを感じるのを防止することができる。
操作手段可動部1は、高倍率でのミクロな領域を低速移動する微動と、低倍率でのマクロな領域を高速移動する粗動の両方に対応するのが好ましい。以下、この微動および粗動について説明する。微動と粗動とに対応するために、例えば、低速から高速まで広い速度領域に対応した駆動源を有する装置や、低速に適した駆動源と高速に適した駆動源とをそれぞれ有し、各駆動源を切り替える装置が知られている。近年知られている顕微鏡補助装置には、微動が連続値入力方式、粗動が二値入力方式である装置がある。また、粗動の場合は、入力手段を介して二値入力が入力され、微動の場合は、入力手段を介して連続値入力が入力される微動粗動兼用入力手段が設けられた構成や、微動用と粗動用にそれぞれ別の専用入力手段が設けられた構成が知られている。本実施形態の顕微鏡補助装置110は、微動の連続値入力であっても、粗動の二値入力であっても適用可能であり、反対に、粗動の連続値入力であっても、粗動の二値入力手段であっても適用可能である。また、顕微鏡補助装置110は、微動粗動兼用入力手段であっても、微動用と粗動用の専用入力手段であっても適用可能である。このように顕微鏡補助装置110は、種々の入力方式に対応することができる。
操作手段可動部1は、2相の交流電圧が印加される定在波型の超音波モータを有するのが好ましい。前述したように、微動と粗動とに対応するため、低速から高速まで広い速度領域に対応した駆動源を有する装置が知られており、その駆動源として、定在波型の超音波モータを有する装置が、例えば、特開2014-212682号公報に開示されている。操作手段可動部1が定在波型の超音波モータを有する場合、制御部2は、超音波モータに印加する交流電圧の周波数および位相差のうちの少なくとも一方を変更することにより、等速制御モードと追従制御モードとを切り替える。そして、いずれの制御モードでも、操作手段可動部1の移動速度を変化させることができ、よって、低速から高速まで広い速度領域に対応することができる。この速度領域の幅は、超音波モータと異なる他のモータ(例えばステッピングモータ等)と比べて、極めて広い。
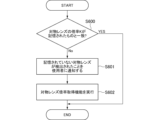
また、制御部2は、総合倍率取得機能で総合倍率Mが取得できない場合には、操作手段可動部1の動作を停止するのが好ましい。総合倍率Mが取得不可であるということは、操作手段10がカメラ106で撮影されていないということである。この撮影されていない状態で操作手段10を移動させた場合、例えば、操作手段10が予想外の方向へ移動して、破損等事故が生じるおそれがある。従って、総合倍率Mが取得できない場合に操作手段可動部1の動作を停止することにより、破損等事故を防止することができ、安全性が高まる。
図16A~図16Fは、それぞれ、顕微鏡の視野内に操作手段が位置する状態の一例である。以下、顕微鏡視野内の操作手段10の位置によって、操作手段10の移動速度を変化させる構成について説明する。
図16Aに示す状態では、顕微鏡の視野の画像中で、操作手段10が当該画像の外周付近に位置する。図16Bに示す状態では、顕微鏡の視野の画像中で、操作手段10が当該画像の中央部付近に位置する。制御部2は、図16Aに示す状態よりも、図16Bに示す状態となった場合に、操作手段可動部1によって操作手段10を移動させる移動速度を増加させる、すなわち、高速にする変更制御を行うのが好ましい。外周付近で操作手段10を高速に移動すると、操作手段10が誤って顕微鏡の視野外へ出てしまうおそれがあるが、低速で操作手段10を移動することにより、そのような不具合が生じるのを防止することができる。
図16Cに示す状態では、顕微鏡の視野の画像中で、操作手段10が操作手段可動部1に対し近位となる右側に位置する。図16Dに示す状態では、顕微鏡の視野の画像中で、操作手段10が操作手段可動部1に対し遠位となる左側に位置する。制御部2は、図16Cに示す状態よりも、図16Dに示す状態となった場合に、操作手段可動部1によって操作手段10を移動させる移動速度を増加させる変更制御を行うのが好ましい。通常右側に配置された操作手段10は、顕微鏡の視野内の右側で使用するものであるが、操作手段10が左側にある場合には、高速に右側へ移動させる方が、迅速な操作手段10の操作が可能となる。
図16Eに示す状態では、顕微鏡の視野の画像中で、操作手段10が当該画像の中央部側に移動する。図16Fに示す状態では、顕微鏡の視野の画像中で、操作手段10が当該画像の外周側に移動する。制御部2は、図16Eに示す状態よりも、図16Fに示す状態となった場合に、操作手段可動部1によって操作手段10を移動させる移動速度を増加させる変更制御を行うのが好ましい。通常は画像の中央部付近に対象物103があるので、操作手段10を外周方向へ移動させる場合は、当該操作手段10を対象物103から離す操作となるので、高速で操作手段10を移動させることができる。一方、操作手段10を中央部方向へ移動させる場合は、当該操作手段10を対象物103に近づける操作となるので、例えば対象物103との衝突を考慮して、低速で操作手段10を移動する方がよい。
以上のように、画像内での操作手段10の位置に応じて操作手段10の移動速度を変更することにより、操作手段10に対する操作性が向上する。
<第3実施形態>
以下、図17A~図18を参照して、第3実施形態について説明する。本実施形態は、追従制御モードと等速制御モードとの切り替え態様が異なること以外は前記第2実施形態と同様である。具体的には、本実施形態では、追従制御モードと、追従制御モードが開始してから所定条件(以下「切替条件」という)を満たした後に等速制御モードとに切り替えられる。そして、制御部2は、総合倍率Mが所定値以下と判断した場合に、追従制御モードから等速制御モードに迅速に切り替わるように、切替条件を変更する。
以下、図17A~図18を参照して、第3実施形態について説明する。本実施形態は、追従制御モードと等速制御モードとの切り替え態様が異なること以外は前記第2実施形態と同様である。具体的には、本実施形態では、追従制御モードと、追従制御モードが開始してから所定条件(以下「切替条件」という)を満たした後に等速制御モードとに切り替えられる。そして、制御部2は、総合倍率Mが所定値以下と判断した場合に、追従制御モードから等速制御モードに迅速に切り替わるように、切替条件を変更する。
図17Aは、追従制御モードと等速制御モードとの切り替わり条件を説明するための図である。17Aに示すように、入力手段20は、図14Aと同様に、レバー20aおよびセンサ20bを有する。入力手段20は、レバー20aの前後操作に応じて、センサ20bがプラスまたはマイナスの値で検知し、レバー20aの左右操作に応じて、センサ20bがプラスまたはマイナスの値で検知する。また、レバー20aが直立状態にある場合には、センサ20bが0(零)の値で検知する。第2実施形態との主な違いは、使用者がレバー20aを倒した量が閾値以上になると、それを切り替わり命令として、等速制御モードに切り替わることである。このとき、レバー20aを倒す量が増加しても、連続値の入力とはせず、等速移動が継続される。また、レバー20aを直立状態に戻すと、それを動作停止命令として等速移動が停止する。
図17Bは、追従制御モードと等速制御モードとが切り替わる動作を説明するためのタイミングチャートである。図17Bでは、(a)および(b)の横軸はいずれも時間経過を示し、(a)の縦軸は入力された連続値の変化を示し、(b)の縦軸は操作手段が追従する目標位置の変化を示している。図17Bに示すように、時間T1で入力手段20のレバー20aをプラス方向に倒し始めて、時間T2までその倒す速度が増加している。初期状態では、追従制御モードであるので、図17Bに示すように、操作手段10(操作手段可動部1)も時間T1で移動を開始し、時間T2までその移動速度が増加している。図17Bのθ1およびθ2は、それぞれ、角度の閾値である。レバー20aの倒す量(傾斜角度)が閾値θ1を超えると、等速制御モードへ切り替わる。時間T3で閾値θ1を超えるので、等速制御モードに切り替わり、レバー20aの倒す量に関わらず、操作手段10が等速で移動する。時間T4でレバー20aを戻すように操作すると、その動作を動作停止命令とするので、時間T4(位置P1)で操作手段10の移動が停止する。時間T5でレバー20aが直立状態へ戻ると、等速制御モードから当初の追従制御モードへ戻る。レバー20aがマイナス方向に倒れたときも同様に、追従制御モードの範囲内では、時間T6でレバー20aの倒れる角度が変化するのに伴って、操作手段10の移動速度も変化する。時間T7で閾値θ2に到達すると、等速制御モードに切り替わり、レバー20aの倒す量に関わらず、操作手段10が等速で移動する。時間T8でレバー20aを倒す方向が反転すると、操作手段10の移動が停止する。このように、レバー20aを倒す量が閾値θ1と閾値θ2との範囲内では、追従制御モードによる微動となり、レバー20aを倒す量が閾値θ1または閾値θ2を超えると、等速制御モードによる粗動となる。これにより、制御モードを切り替えるスイッチ等を別途設けることなく、1つの入力手段20で粗動と微動とを操作を兼用することができる。
また、本実施形態では、総合倍率取得機能で取得された総合倍率Mが高倍率の場合に比べて低倍率の場合に、追従制御モードから等速制御モードへ迅速に切り替わるように、切替条件が変更される。切替条件を変更する方法としては、例えば、閾値θ1および閾値θ2を変更する方法が挙げられる。図17Bの閾値θ1dおよび閾値θ2dは、閾値θ1および閾値θ2よりも、追従制御モードから等速制御モードへ迅速に切り替わるように切替条件が変更された例である。この変更により、図17Bの点線のように、時間T3dと時間T7dとの間で、等速制御モードに切り替わるので、レバー20aの倒す量が切替条件変更前と同じであっても、操作手段10の移動距離が大きくなる。
通常、高倍率で追従制御モードの微動をし、低倍率で等速制御モードの粗動をする場合が多い。従って、本実施形態のような粗動の操作と微動の操作とを兼用可能な入力手段20では、当初微動で操作手段10の移動を開始して、切替条件を満たした後に、粗動に切り替わるような場合、切り替わりが早い方が使用者の意図に近い制御をすることができる。具体的には、総合倍率Mが高倍率の場合に比べて低倍率の場合に、前述の閾値θ1dおよび閾値θ2dの絶対値を小さく変更させる。これにより、総合倍率Mを利用した迅速な速度変更制御が可能となり、使用者の意図により近い制御をすることができる。なお、切替条件を変更する方法としては、閾値θ1および閾値θ2を変更する方法の他にも、例えば、レバー20aを倒す速度が所定の速度になったことを検出する方法を用いてもよい。
次に、等速制御モードから当初の追従制御モードへ戻る条件の変形例について説明する。図18は、変形例(他の動作)を説明するためのタイミングチャートである。図18では、(a)および(b)の横軸はいずれも時間経過を示し、(a)の縦軸は入力された連続値の変化を示し、(b)の縦軸は操作手段が追従する目標位置の変化を示している。図18に示すように、時間T1でレバー20aをプラス方向に倒し始めて、時間T2までその倒す速度が増加している。初期状態では、追従制御モードであるので、図18に示すように、操作手段10も時間T1で移動を開始し、時間T2までその速度が増加している。レバー20aの倒す量(傾斜角度)が閾値θ1を超えると、等速制御モードへ切り替わる。時間T3で閾値θ1を超えるので、等速制御モードに切り替わり、レバー20aの倒す量に関わらず、操作手段10が等速で移動する。ここまでは、図17Bと同じである。図17Bと異なる点は、図18に示すように、時間T4でレバー20aを戻していくと、瞬時に当初の追従制御モードに戻ることである。このため、時間T4で操作手段10の移動方向が反転するとともに、操作手段10が追従制御モードで移動するので、時間T5と時間T6との間でレバー20aを倒す速度が変化する。この変化に応じて、操作手段10の移動速度も変化する。時間T7で閾値θ2に到達すると、等速制御モードに切り替わり、レバー20aの倒す量に関わらず、操作手段10が等速で移動する。時間T8でレバー20aの倒す方向が反転すると、再び当初の追従制御モードに戻る。
また、切替条件の変更により、図18の点線のように、時間T3dと時間T7dとの間で、等速制御モードに切り替わるので、レバー20aの倒す量が切替条件変更前と同じであっても、操作手段10の移動距離が大きくなる。なお、等速制御モードに切り替わった後は、入力読取回路2eで読み取られた動作停止命令に応じて、制御部2が、操作手段可動部1の移動速度を総合倍率Mの大きさによって変化させてもよい。低倍率の場合ほど、操作手段可動部1を高速に制御することによって、さらに使用者の意図に近い制御をすることができる。
以上、本発明の好ましい実施形態について説明したが、本発明は上述した各実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。本発明は、上述の各実施形態の1以上の機能を実現するプログラムを、ネットワークや記憶媒体を介してシステムや装置に供給し、そのシステムまたは装置のコンピュータの1つ以上のプロセッサがプログラムを読み出して実行する処理でも実現可能である。また、本発明は、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
1 操作手段可動部
2 制御部
10 操作手段
20 入力手段
30 コントローラ
100 顕微鏡
107 光学アダプタ
109 顕微鏡マウント(マウント部)
110 顕微鏡補助装置
201 対物レンズ
2 制御部
10 操作手段
20 入力手段
30 コントローラ
100 顕微鏡
107 光学アダプタ
109 顕微鏡マウント(マウント部)
110 顕微鏡補助装置
201 対物レンズ
Claims (27)
- 複数の対物レンズと、前記対物レンズを介した視野内の画像を撮像可能なカメラが装着されるマウント部と、を有する顕微鏡に装着して用いられる顕微鏡補助装置であって、
前記視野内で対象物を操作する操作手段に接続され、該操作手段を移動させることが可能な操作手段可動部と、
前記カメラから前記画像を取得する画像処理手段と、
前記操作手段可動部、前記画像処理手段の作動を制御する制御手段と、を備え、
前記画像処理手段は、前記操作手段可動部によって前記操作手段を前記対物レンズの光軸方向以外の方向に移動させた際、その移動前の第1画像と、該移動後の第2画像とを前記カメラから取得し、
前記制御手段は、前記第1画像での前記操作手段の像の位置と、前記第2画像での前記操作手段の像の位置と、前記移動時の前記操作手段の移動量とに基づいて、前記対象物を前記カメラで撮像する際の倍率としての総合倍率を取得する総合倍率取得機能を有することを特徴とする顕微鏡補助装置。 - 前記画像処理手段は、前記操作手段可動部によって前記操作手段を前記対物レンズの光軸方向の方向に移動させた際、その移動前の第1光軸方向移動画像と、該移動後の第2光軸方向移動画像とを前記カメラから取得し、
前記制御手段は、前記第1光軸方向移動画像と前記第2光軸方向移動画像とのデフォーカス量の変化量と、前記操作手段の3次元空間での移動量とに基づいて、前記第1光軸方向移動画像および前記第2光軸方向移動画像の撮像に用いられた対物レンズの倍率を取得する対物レンズ倍率取得機能を有することを特徴とする請求項1に記載の顕微鏡補助装置。 - 各前記対物レンズの倍率を記憶可能な記憶手段と、
前記対物レンズ倍率取得機能によって取得された前記対物レンズの倍率が、前記記憶手段に記憶された各前記対物レンズのいずれの倍率とも一致しないと、前記制御手段が判断した場合に、その旨を報知する報知手段と、を備えることを特徴とする請求項2に記載の顕微鏡補助装置。 - 前記マウント部は、前記カメラで撮像される画像の倍率を変更する光学アダプタを介して、前記カメラが装着可能に構成されており、
前記制御手段は、前記総合倍率取得機能によって取得され前記総合倍率と、前記対物レンズ倍率取得機能によって取得された前記対物レンズの倍率とに基づいて、前記光学アダプタの倍率を取得する光学アダプタ倍率取得機能を有することを特徴とする請求項2または3に記載の顕微鏡補助装置。 - 前記光学アダプタの倍率を記憶可能な記憶手段と、
前記光学アダプタ倍率取得機能によって取得された前記光学アダプタの倍率が、前記記憶手段に記憶された倍率と一致しないと、前記制御手段が判断した場合に、その旨を報知する報知手段と、を備えることを特徴とする請求項4に記載の顕微鏡補助装置。 - 前記対物レンズの変更を検出する変更検出手段を備え、
前記制御手段は、前記変更検出手段によって前記対物レンズの変更が検出された場合に、前記総合倍率取得機能を実行することを特徴とする請求項1乃至5のうちの何れか1項に記載の顕微鏡補助装置。 - 前記操作手段可動部に対する動作指示を入力する入力手段を介して前記操作手段可動部を動作させる第1移動モードと、前記入力手段から独立して前記操作手段可動部を動作させる第2移動モードとが設定されており、
前記制御手段は、前記第1移動モードから前記第2移動モードへの遷移を検出可能であり、該遷移を検出した場合に、前記総合倍率取得機能を実行することを特徴とする請求項1乃至6のうちの何れか1項に記載の顕微鏡補助装置。 - 前記制御手段は、前記第1移動モードで、前記操作手段可動部による前記操作手段の移動量が所定の距離以上であった場合には、前記総合倍率取得機能を実行することを特徴とする請求項7に記載の顕微鏡補助装置。
- 前記制御手段は、前記操作手段が前記画像内に写っていると判断し、その判断が前記顕微鏡補助装置の起動後の1回目である場合に、前記総合倍率取得機能を実行することを特徴とする請求項1乃至8のうちの何れか1項に記載の顕微鏡補助装置。
- 前記総合倍率取得機能の実行において、前記操作手段を前記対物レンズの光軸方向以外の方向に移動させる場合に、前記光軸方向と直交する一方向への前記操作手段の移動を規制可能に構成されていることを特徴とする請求項1乃至9のうちの何れか1項に記載の顕微鏡補助装置。
- 前記操作手段可動部に対する動作指示を入力する入力手段からの前記操作手段可動部の入力情報を読み取る入力読取手段を備え、
前記入力読取手段は、前記入力情報として、前記操作手段可動部の動作停止命令を読み取り可能であることを特徴とする請求項1乃至10のうちの何れか1項に記載の顕微鏡補助装置。 - 前記操作手段可動部に対する動作指示を入力する入力手段からの前記操作手段可動部の入力情報を読み取る入力読取手段を備え、
前記入力読取手段は、前記入力情報として、前記操作手段可動部の動作開始命令を読み取り可能であり、
前記制御手段は、前記総合倍率が所定値以下と判断した場合に、前記動作開始命令に応じて、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項1乃至10のうちの何れか1項に記載の顕微鏡補助装置。 - 前記操作手段可動部に対する動作指示を入力する入力手段からの前記操作手段可動部の入力情報を読み取る入力読取手段を備え、
前記入力読取手段は、前記入力情報として、前記操作手段可動部の目標位置に関する情報を読み取り可能であり、
前記制御手段は、前記操作手段可動部を前記入力読取手段で読み取られた前記目標位置へ追従させる追従制御モードと、前記追従制御モードが開始してから所定条件を満たした後に前記操作手段可動部を等速で移動させる等速制御モードとに切り替え可能であり、前記総合倍率が所定値以下と判断した場合に、前記所定条件を変更することを特徴とする請求項1乃至10のうちの何れか1項に記載の顕微鏡補助装置。 - 複数の対物レンズと、前記対物レンズを介した視野内の画像を撮像可能なカメラが装着されるマウント部と、を有する顕微鏡に装着して用いられる顕微鏡補助装置であって、
前記視野内で対象物を操作する操作手段に接続され、該操作手段を移動させることが可能な操作手段可動部と、
前記カメラから前記画像を取得する画像処理手段と、
前記操作手段可動部に対する動作指示を入力する入力手段からの前記操作手段可動部の動作開始命令および動作停止命令の入力情報を読み取る入力読取手段と、
前記操作手段可動部、前記画像処理手段および前記入力読取手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記対象物を前記カメラで撮像する際の倍率としての総合倍率を取得する総合倍率取得機能を有し、前記総合倍率が所定値以下と判断した場合に、前記動作開始命令に応じて、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする顕微鏡補助装置。 - 前記制御手段は、前記総合倍率が所定値以下と判断した場合に、前記動作開始命令に応じて、前記操作手段可動部によって前記操作手段を等速で移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項14に記載の顕微鏡補助装置。
- 前記入力読取手段は、前記入力情報として、前記操作手段可動部の目標位置に関する情報を読み取り可能であり、
前記制御手段は、前記操作手段可動部を前記入力読取手段で読み取られた前記目標位置へ追従させる追従制御モードを設定可能であり、
前記制御手段は、前記総合倍率が所定値以下と判断した場合に、前記追従制御モードで、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項14または15に記載の顕微鏡補助装置。 - 前記操作手段可動部は、2相の交流電圧が印加される超音波モータを有し、
前記制御手段は、前記交流電圧の周波数および位相差のうちの少なくとも一方を変更することにより、前記追従制御モードと、前記操作手段可動部を等速で移動させる等速制御モードとを切り替えることを特徴とする請求項16に記載の顕微鏡補助装置。 - 前記制御手段は、前記総合倍率が取得できない場合には、前記操作手段可動部の動作を停止することを特徴とする請求項14乃至17のうちの何れか1項に記載の顕微鏡補助装置。
- 前記画像中で、前記操作手段が前記画像の外周側に位置する場合よりも、前記画像の中央部付近に位置した場合に、前記制御手段は、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項14乃至18のうちの何れか1項に記載の顕微鏡補助装置。
- 前記画像中で、前記操作手段が前記操作手段可動部に対し近位に位置する場合よりも、前記操作手段可動部に対し遠位に位置する場合に、前記制御手段は、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項14乃至19のうちの何れか1項に記載の顕微鏡補助装置。
- 前記画像中で、前記操作手段が前記画像の中央部側に移動する場合よりも、前記画像の外周側に移動する場合に、前記制御手段は、前記操作手段可動部によって前記操作手段を移動させる移動速度を増加させる変更制御を行うことを特徴とする請求項14乃至20のうちの何れか1項に記載の顕微鏡補助装置。
- 複数の対物レンズと、前記対物レンズを介した視野内の画像を撮像可能なカメラが装着されるマウント部と、を有する顕微鏡に装着して用いられる顕微鏡補助装置であって、
前記視野内で対象物を操作する操作手段に接続され、該操作手段を移動させることが可能な操作手段可動部と、
前記カメラから前記画像を取得する画像処理手段と、
前記操作手段可動部に対する動作指示を入力する入力手段からの前記操作手段可動部の動作開始命令、動作停止命令および目標位置に関する入力情報を読み取る入力読取手段と、
前記操作手段可動部、前記画像処理手段および前記入力読取手段の作動を制御する制御手段と、を備え、
前記制御手段は、前記対象物を前記カメラで撮像する際の倍率としての総合倍率を取得する総合倍率取得機能を有し、前記操作手段可動部を前記入力読取手段で読み取られた前記目標位置へ追従させる追従制御モードと、前記追従制御モードが開始してから所定条件を満たした後に前記操作手段可動部を等速で移動させる等速制御モードとに切り替え可能であり、前記総合倍率が所定値以下と判断した場合に、前記所定条件を変更することを特徴とする顕微鏡補助装置。 - 前記制御手段は、前記総合倍率の大きさに応じて、前記操作手段可動部が移動する移動速度を変化させることを特徴とする請求項22に記載の顕微鏡補助装置。
- 前記操作手段可動部は、2相の交流電圧が印加される超音波モータを有し、
前記制御手段は、前記交流電圧の周波数および位相差のうちの少なくとも一方を変更することにより、前記追従制御モードと前記等速制御モードとを切り替えることを特徴とする請求項22または23に記載の顕微鏡補助装置。 - 前記制御手段は、前記総合倍率が取得できない場合には、前記操作手段可動部の動作を停止することを特徴とする請求項22乃至24のうちの何れか1項に記載の顕微鏡補助装置。
- 複数の対物レンズと、前記対物レンズを介した視野内の画像を撮像可能なカメラが装着されるマウント部と、を有する顕微鏡に装着して用いられ、前記視野内で対象物を操作する操作手段に接続され、該操作手段を移動させることが可能な操作手段可動部と、該操作手段可動部の作動を制御する制御手段と、を備える顕微鏡補助装置を制御する方法であって、
前記カメラから前記画像を取得する画像処理工程を有し、
前記画像処理工程では、前記操作手段可動部によって前記操作手段を前記対物レンズの光軸方向以外の方向に移動させた際、その移動前の第1画像と、該移動後の第2画像とを前記カメラから取得し、
前記第1画像での前記操作手段の像の位置と、前記第2画像での前記操作手段の像の位置と、前記移動時の前記操作手段の移動量とに基づいて、前記対象物を前記カメラで撮像する際の倍率としての総合倍率を取得することを特徴とする顕微鏡補助装置の制御方法。 - 請求項1乃至25の何れか1項に記載の顕微鏡補助装置の各手段をコンピュータに実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021154368A JP2023045794A (ja) | 2021-09-22 | 2021-09-22 | 顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム |
| PCT/JP2022/033237 WO2023047927A1 (ja) | 2021-09-22 | 2022-09-05 | 総合倍率を利用した制御が可能な顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021154368A JP2023045794A (ja) | 2021-09-22 | 2021-09-22 | 顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023045794A true JP2023045794A (ja) | 2023-04-03 |
Family
ID=85720574
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021154368A Pending JP2023045794A (ja) | 2021-09-22 | 2021-09-22 | 顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2023045794A (ja) |
| WO (1) | WO2023047927A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20250231083A1 (en) * | 2024-01-12 | 2025-07-17 | Viavi Solutions Inc. | Multiple magnification inspection of duts |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4758526B2 (ja) * | 1999-09-21 | 2011-08-31 | 株式会社三友製作所 | 微細作業用マイクロマニピュレーション装置 |
| JP4992491B2 (ja) * | 2007-03-14 | 2012-08-08 | 日本精工株式会社 | マニピュレータシステム |
| JP2009078345A (ja) * | 2007-08-02 | 2009-04-16 | Nsk Ltd | マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム |
-
2021
- 2021-09-22 JP JP2021154368A patent/JP2023045794A/ja active Pending
-
2022
- 2022-09-05 WO PCT/JP2022/033237 patent/WO2023047927A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| WO2023047927A1 (ja) | 2023-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2925647B2 (ja) | 顕微鏡変倍装置 | |
| US5886684A (en) | Micromanipulator system with multi-direction control joy stick and precision control means | |
| JP5841379B2 (ja) | 硬さ試験機 | |
| JP2001059940A (ja) | 顕微鏡及び記録媒体 | |
| JP2010233998A (ja) | 眼科装置 | |
| EP2557446B1 (en) | Microscope controller and microscope system comprising the microscope controller | |
| JP4332905B2 (ja) | 顕微鏡システム | |
| JP3955126B2 (ja) | 内視鏡の視野変換装置 | |
| JP2010112969A (ja) | 共焦点顕微鏡 | |
| WO2023047927A1 (ja) | 総合倍率を利用した制御が可能な顕微鏡補助装置、顕微鏡補助装置の制御方法およびプログラム | |
| JP4250062B2 (ja) | 眼科装置 | |
| JP2012179111A (ja) | 眼科装置 | |
| US12013525B2 (en) | Magnified observation apparatus | |
| JP5767142B2 (ja) | 医療用観察システム | |
| US7098620B2 (en) | Minute object manipulating apparatus | |
| JP2003315015A (ja) | 測定顕微鏡 | |
| JP4687853B2 (ja) | X線透視撮影装置 | |
| JP2964870B2 (ja) | マイクロマニピュレータシステム | |
| JP2024124792A (ja) | 顕微鏡システム、顕微鏡補助装置及びその制御方法とプログラム | |
| JP2023045793A (ja) | 顕微鏡補助装置、顕微鏡補助装置の制御方法、及びプログラム | |
| EP4016161B1 (en) | Control device for a microscope | |
| JP5174693B2 (ja) | 顕微鏡システム | |
| US20230041003A1 (en) | Microscope auxiliary apparatus | |
| JPH10127267A (ja) | マイクロマニピュレータシステム | |
| JP2024126995A (ja) | 顕微鏡システム、補助装置及びその制御方法とプログラム |