JP2024106902A - 歩容状態認識装置および歩容状態認識方法 - Google Patents
歩容状態認識装置および歩容状態認識方法 Download PDFInfo
- Publication number
- JP2024106902A JP2024106902A JP2023011389A JP2023011389A JP2024106902A JP 2024106902 A JP2024106902 A JP 2024106902A JP 2023011389 A JP2023011389 A JP 2023011389A JP 2023011389 A JP2023011389 A JP 2023011389A JP 2024106902 A JP2024106902 A JP 2024106902A
- Authority
- JP
- Japan
- Prior art keywords
- subject
- gait
- walking
- unit
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Rehabilitation Tools (AREA)
Abstract
【課題】本発明は、被検者の歩容状態を歩数に応じた時間経過の変遷として認識して可視化することが可能な歩容状態認識装置および歩容状態認識方法を実現する。
【解決手段】被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置に基づいて、被検者の歩行周期ごとの歩容構造を分析した後、当該分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、当該比較結果を解析するようにして、その解析結果に基づいて、被検者の歩容状態を認識するようにした。
【選択図】図1
【解決手段】被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置に基づいて、被検者の歩行周期ごとの歩容構造を分析した後、当該分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、当該比較結果を解析するようにして、その解析結果に基づいて、被検者の歩容状態を認識するようにした。
【選択図】図1
Description
本発明は、歩容状態認識装置および歩容状態認識方法に関し、例えば、下肢に障害がある維持期・生活期の人や脚力が弱くなった人に対する治療処理やリハビリテーションの際に適用して好適なものである。
近年、サイバニクス治療(あるいはCybernics Treatment)という脳神経・筋系の機能改善を行うための動作機能向上装置が医療機器として認可され、筋萎縮性側索硬化症(ALS)、脊髄性筋萎縮症、 球脊髄性筋萎縮症(SBMA)、シャルコー・マリー・トゥース病、筋ジストロフィー、遠位型ミオパチー、先天性ミオパチー、封入体筋炎(IBM)の患者に対して保険が適用されている。
自立支援用下肢タイプの動作機能向上装置では、下肢に障害がある維持期・生活期の方や脚力が弱くなった方に対して、本人の意図に応じた随意的な筋活動に伴う生体電位を基に、下肢の運動を制御および補助することにより、身体機能の維持、向上を促進し、自立度を高めることに貢献している。
この動作機能向上装置は、下肢運動のアシスト量調整のためのパラメータを疾患、状態によって適応的に調整する必要がある。実際に現行モデルの動作機能向上装置では、歩容をサポートするために各脚の関節に対して併せて20個以上のパラメータ調整が必要であり、設定者の経験値や被検者の状態により、設定値にばらつきが出ているという現状がある。また、その設定値が選ばれた理由も明確ではないことが多い。
このような動作機能向上装置を用いた治療やリハビリテーションに伴う被検者の歩行機能の経時的な変化を認識すべく、従来から被検者の歩行状態を評価する方法が多数提案されている。
例えば、歩行者の両脚の股関節、膝関節または足関節を挟むように加速度センサ等を取り付けておき、当該加速度センサ等による各関節の関節角度に基づいて、歩行者の歩行状態を評価する歩行解析システムが提案されている(特許文献1参照)。
また、サンプリングタイミング毎に検出される股関節角度関連信号に基づいて大腿位相角を算出し、一のサンプリングタイミングでの大腿位相角を位相パターン関数に適用して当該一のサンプリングタイミングが歩行周期中のどの歩行動作タイミングにあたるかを算出し、歩行動作タイミングを出力トルクパターンに適用して当該一のサンプリングタイミングにおいて出力すべきトルク値を算出し、算出されたトルク値の補助力を出力するようにアクチュエータの作動制御を行うようにして、下腿を正常に歩行動作させることが困難なユーザに対しても、歩行周期中の歩行状態に即した適切な歩行補助力を付与することが可能な歩行動作補助装置が提案されている(特許文献2参照)。
さらに、脚に麻痺が生じた麻痺患者の歩行動作に応じた麻痺体部から複数のセンサ(姿勢センサ、撮像カメラ、荷重センサ、角度センサ)を用いて複数の動作量を取得し、当該動作量の少なくとも1つが予め設定された複数の異常歩行基準のいずれかを満たす場合に、歩行動作が異常歩行であると評価するようになされた歩行評価装置が提案されている(特許文献3参照)。
ところが、上述の特許文献1の歩行解析システムでは、画像処理を用いることなく、下肢の関節の動作を把握可能で歩行状態をより細かく評価することが可能であるが、歩行フェーズという歩行周期単位や両脚の関係を示唆するような手法は開示されていない。また、異常歩行に関する内容も開示されていない。
また、上述の特許文献2の歩行動作補助装置は、歩行動作に対して補助力を与えるアクチュエータの角度から股関節の角度を算出して得られるパターン認識結果から補助トルクを求める手法であり、単脚の股関節角度のみ利用して歩行フェーズに類似するものを作成して補助力のトルク値を決定している。このため歩行フェーズのような両脚の動作情報による歩行の形を得ることができないため、異常歩行などを検出することもなく、歩行フェーズを評価として用いることもない。
さらに、上述の特許文献3の歩行評価装置では、片麻痺患者の異常歩行基準を複数(7通り)設定しておき、患脚の遊脚相および立脚相の歩行タイミングにおける麻痺体部の動作量と対応する異常歩行基準とを比較して、その歩行動作が異常歩行であるか否かを評価する手法であり、歩行状態を全体的な変化として時系列で評価するものではないため、歩行の変遷を状態評価として把握することが困難である。
このように特許文献1~3のような歩行評価方法では、被検者が歩行困難な状態や異常歩行状態から健常者と同等の歩行状態に移行するまでの歩行機能の経時的な変化を認識することが困難である。したがって、上述した動作機能向上装置における下肢運動のアシスト量調整のためのパラメータ設定を効率良く行うことは非常に困難となる問題がある。
本発明は以上の点を考慮してなされたもので、被検者の歩容状態を歩数に応じた時間経過の変遷として認識して可視化することが可能な歩容状態認識装置および歩容状態認識方法を提案しようとするものである。
かかる課題を解決するため本発明においては、被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する動作機能向上装置を用いて、被検者の歩容状態を認識する歩容状態認識装置において、動作機能向上装置は、被検者の下肢動作に連動して能動的または受動的に駆動する駆動部と、駆動部からの出力信号に基づいて、被検者の下肢動作に伴う関節周りの物理量を検出する関節周り検出部と、関節周り検出部により検出される物理量に基づいて、被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する肢位情報算出部と、肢位情報算出部による算出結果に基づいて、被検者の歩行周期ごとの歩容構造を分析する歩容構造分析部と、歩容構造分析部による分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、当該比較結果を解析する変遷比較解析部と、変遷比較解析部による解析結果に基づいて、被検者の歩容状態を認識する歩容状態認識部とを備えるようにした。
この結果、歩容状態認識装置では、被検者の歩行周期ごとの歩容構造の分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較し、その比較結果を解析して被検者の歩容状態を認識することにより、動作機能向上装置における下肢運動のアシスト量調整のためのパラメータ設定を効率良く行うことが可能となる。
また本発明においては、歩容構造分析部は、被検者の歩行周期ごとに歩行構造を構成する一連の動作フェーズの占有率をそれぞれ算出し、変遷比較解析部は、被検者の歩容状態の変遷を、歩容構造分析部により算出された各動作フェーズの占有率を歩数ごとに列挙した第1グラフとして生成し、基準となる健常者に相当する第2グラフと時系列的に比較して、当該比較結果を解析するようにした。この結果、歩容状態認識装置では、被検者の歩容状態を可視化することが可能となる。
さらに本発明においては、歩容状態認識部は、変遷比較解析部による解析結果に基づいて、被検者の歩容状態の変遷から当該被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出するようにした。この結果、歩容状態認識装置では、被検者の歩行周期を構成する各動作フェーズの課題から、被検者自身が自己の歩行状態の問題点を一歩ごとに認識することが可能となる。
さらに本発明においては、歩容状態認識部は、変遷比較解析部による解析結果に基づいて、被検者の歩容状態の変遷と特定疾患に特有な歩行症状との相関関係を分析するようにした。この結果、歩容状態認識装置では、当該相関関係の分析結果に基づいて、被検者が患う特定疾患を早期に発見することが可能となる。
さらに本発明においては、被検者の歩行周期を構成する各動作フェーズは、被検者の左右いずれか一方の脚を支持脚とするとき、他方の脚のつま先部の高さと当該支持脚の踵部の高さが一致する接地点が形成されるときの第1支持脚フェーズと、当該接地点から前方の支持脚の膝下が地面に対して垂直になるときの第2支持脚フェーズと、当該支持脚の股関節が背側に伸展するときの第3支持脚フェーズと、当該支持脚の膝関節が緩み曲がるときの第4支持脚フェーズと、支持脚が遊脚に交代して接地点が形成されるときの第1遊脚フェーズと、当該接地点から前方の当該遊脚の大腿部が地面に対して垂直になるときの第2遊脚フェーズと、当該遊脚の踵部の前後位置が他方の脚と一致するときの第3遊脚フェーズと、当該遊脚の膝下部が地面に対して垂直になるときの第4遊脚フェーズとからなるようにした。
さらに本発明においては、動作機能向上装置は、被検者の左右の足裏面への圧力分布を検出する床反力センサを有し、肢位情報算出部は、関節周り検出部により検出される物理量および床反力センサの検出結果に基づいて、被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出するようにした。
さらに本発明においては、被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する動作機能向上装置を用いて、被検者の歩容状態を認識する歩容状態認識方法において、被検者の下肢動作に連動して能動的または受動的に駆動する駆動部が動作機能向上装置に設けられ、当該駆動部の出力信号に基づき検出された被検者の下肢動作に伴う関節周りの物理量に基づいて、被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する第1ステップと、第1ステップによる算出結果に基づいて、被検者の歩行周期ごとの歩容構造を分析する第2ステップと、第2ステップによる分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、当該比較結果を解析する第3ステップと、第3ステップによる解析結果に基づいて、被検者の歩容状態を認識する第4ステップとを備えるようにした。
この結果、歩容状態認識方法では、被検者の歩行周期ごとの歩容構造の分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較し、その比較結果を解析して被検者の歩容状態を認識することにより、動作機能向上装置における下肢運動のアシスト量調整のためのパラメータ設定を効率良く行うことが可能となる。
本発明によれば、被検者の歩容状態を歩数に応じた時間経過の変遷として認識して、動作機能向上装置における下肢運動のアシスト量調整のためのパラメータ設定を自動的に行うことが可能な歩容状態認識装置および歩容状態認識方法を実現することができる。
以下図面について、本発明の一実施の形態を詳述する。
(1)本実施の形態による歩行支援システムの構成
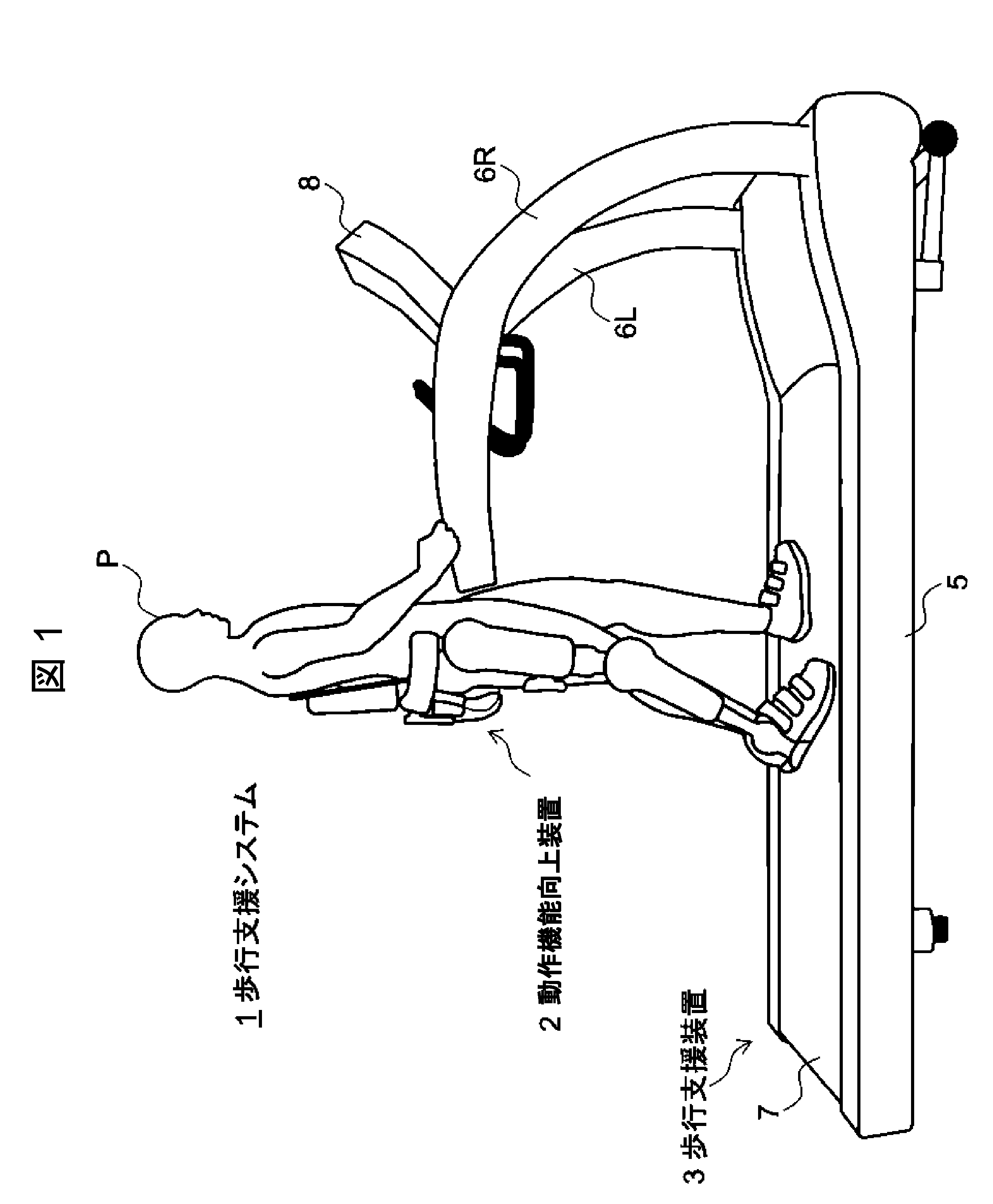
図1は本実施の形態による歩行支援システム1を示す。歩行支援システム1は、被検者Pの動作を補助する動作機能向上装置2と、被検者Pが歩行動作によるリハビリテーションを支援するための歩行支援装置3とを備えている。動作機能向上装置2と歩行支援装置3とは有線または無線により通信可能に接続されている。
図1は本実施の形態による歩行支援システム1を示す。歩行支援システム1は、被検者Pの動作を補助する動作機能向上装置2と、被検者Pが歩行動作によるリハビリテーションを支援するための歩行支援装置3とを備えている。動作機能向上装置2と歩行支援装置3とは有線または無線により通信可能に接続されている。
まず、歩行支援装置3は、トレッドミル5を基準としたその両側に一対の関係をなす左フレーム6Lおよび右フレーム6Rが当該トレッドミル5の先端から湾曲して植立され、当該両フレーム6L、6Rの端側部位を被検者Pが両手で把持し得るように構成されている。
トレッドミル5は、ローラの回転により循環するように移動する歩行ベルト7を有する 。アクチュエータ駆動に応じてローラの回転速度を変化させることにより、歩行ベルト7の循環速度を変えることができる。
歩行支援装置3は、トレッドミル5から植立された左フレーム6Lおよび右フレーム6Rの間を橋架するサブフレーム(図示せず)に、例えば液晶ディスプレイからなるモニタ8が設けられ、操作部による操作結果や、被検者の歩行支援に必要な種々の情報を映像表示するようになされている。
このように歩行支援システム1では、動作機能向上装置2を装着した被検者Pが、歩行支援装置3における一対の左フレーム6Lおよび右フレーム6Rの一端を両手で把持して歩行動作時の姿勢を安定化させながら、歩行動作によるリハビリテーションを支援し得るようになされている。
(2)本実施の形態による動作機能向上装置の構成
図2は本実施の形態による動作機能向上装置2を示す。動作機能向上装置2は、被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する装置であり、脳からの信号により筋力を発生させる際に生じる生体電位信号(表面筋電位)や当該装着者の股関節や膝関節の動作角度を検出し、この検出信号に基づいて駆動機構からの駆動力を付与するように作動する。
図2は本実施の形態による動作機能向上装置2を示す。動作機能向上装置2は、被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する装置であり、脳からの信号により筋力を発生させる際に生じる生体電位信号(表面筋電位)や当該装着者の股関節や膝関節の動作角度を検出し、この検出信号に基づいて駆動機構からの駆動力を付与するように作動する。
本実施の形態における下肢型の動作機能向上装置2は、被検者の腰に装着される腰フレーム10と、装着者の下肢に装着される下肢フレーム11と、装着者の関節に対応させて下肢フレーム11に設けられた複数の駆動部12L、12R、13L、13Rと、駆動部12L、12R、13L、13Rの力を装着者に前方または後方から作用させるべく下肢フレーム11に取り付けられた補助力作用部材としてのカフ14L、14R、15L、15Rと、装着者の下肢動作に起因する信号に基づいて駆動部12L、12R、13L、13Rを制御する制御装置30(後述する図3)と、制御装置を搭載した背面ユニット16と、介助者が使用する操作ユニット(図示せず)とを有する。
制御装置30(図3)は、被検者の関節に対応する駆動部12L、12R、13L、13Rのアクチュエータの出力軸を中心に相対的に下肢フレーム11同士を駆動することができる。各駆動部12L、12R、13L、13Rには、アクチュエータの駆動トルクや回転角度等を検出するためのセンサ群が搭載されている。なお、背面ユニット16には、装置全体の駆動電源を供給するためのバッテリユニット(図示せず)が搭載されている。
腰フレーム10は、被検者の腰を受け入れてその後部から左右両側部にかけて包囲し得る前方に開いた平面視略C字形状の部材であり、被検者の背後に位置する後腰フレーム部17と、後腰フレーム部17の両端から湾曲しつつ前方に延びる左腰フレーム部18Lおよび右腰フレーム部18Rとを有する。
左腰フレーム部18Lおよび右腰フレーム部18Rは、開度調節機構(図示せず)を介して後腰フレーム部17に連結されている。左腰フレーム部18Lおよび右腰フレーム部18Rの基部は、後腰フレーム部内17に左右方向にスライド可能に挿入されて保持されている。
下肢フレーム11は、被検者の右下肢に装着される右下肢フレーム19Rと、被検者の左下肢に装着される左下肢フレーム19Lとを有する。左下肢フレーム19Lと右下肢フレーム19Rは、左右対称に形成されている。
左下肢フレーム19Lは、被検者の左大腿の左側に位置する左大腿フレーム20Lと、被検者の左下腿の左側に位置する左下腿フレーム21Lと、被検者の左脚の裏(靴を履く場合には、左側の靴の底)が載置される左脚下端フレーム22Lとを有する。左下肢フレーム19Lは、腰部連結機構23Lを介して左腰フレーム部18Lの先端部に連結されている。
右下肢フレーム19Rは、被検者の右大腿の右側に位置する右大腿フレーム20Rと、被検者の右下腿の右側に位置する右下腿フレーム21Rと、被検者の右脚の裏(靴を履く場合には、右側の靴の底)が載置される右脚下端フレーム22Rとを有する。右下肢フレーム21Rは、腰部連結機構23Rを介して右腰フレーム部18Rの先端部に連結されている。
なお、腰フレーム10(後腰フレーム17、右腰フレーム18Rおよび左腰フレーム18L)と下肢フレーム11(右下肢フレーム19Rおよび左下肢フレーム19L)とは、例えばステンレス等の金属またはカーボンファイバ(炭素繊維)等により細長い板状に形成されたフレーム本体を有し、軽量かつ高い剛性をもつように形成される。本実施の形態においては、強度部材として炭素繊維強化フラスチック(Carbon Fiber Reinforced Plastic;CFRP)およびアルミ合金である超々ジェラルミンを用いることとした。
カフ14L、14R、15L、15Rは、左大腿フレーム20L、右大腿フレーム20R、左下腿フレーム21Lおよび右下腿フレーム21Rに、各々一つずつ設けられている。
左大腿フレーム20Lおよび右大腿フレーム20Rに設けられているカフ(以下、「大腿カフ」と記す。)14L、14Rは、大腿フレーム本体の下端部に取り付けられた大腿カフ支持機構24L、24Rに支持されている。大腿カフ14L、14Rは、被検者の大腿に嵌合させるようにして添え当て得る円弧状に湾曲した装着面を有している。大腿カフ14L、14Rの装着面には、被検者の大腿と隙間をなく密着し得るようフィッティング部材が取り付けられている。
左下腿フレーム21Lおよび右下腿フレーム21Rに設けられているカフ(以下、「下腿カフ」と記す。)15L、15Rは、上側要素の上端部に取り付けられた下腿カフ支持機構25L、25Rに支持されている。下腿カフ15L、15Rは、被検者の下腿に嵌合させるようにして添え当て得る円弧状に湾曲した装着面を有している。下腿カフ15L、15Rの装着面には、被検者の下腿と隙間をなく密着し得るようフィッティング部材が取り付けられている。
実際にこの動作機能向上装置2を被検者に装着する場合、左右の足部にそれぞれ専用靴26L、26Rが装着されるとともに、左右の下腿部にそれぞれ下腿カフ15L、15Rが装着され、さらに左右の大腿部にそれぞれ大腿カフ14L、14Rが装着される。そして、これら足部、下腿部、大腿部をそれぞれ対応するフレームと一体化するように、靴やカフにベルト等を締結させる。
この専用靴26L、26Rは、左右一対の構成からなり、被検者の足先から足首までを密着した状態で保持すると共に、足底に設けられた床反力センサ(後述のFRFセンサ60)により荷重測定し得る。
このように動作機能向上装置2は、装着する被検者の意図に応じた随意的な筋活動に伴う生体電位信号に基づいて、歩行運動を制御および補助することができる。
(3)動作機能向上装置における内部システム構成
図3は、動作機能向上装置2の制御系システムの構成を示すブロック図である。図3に示すように、動作機能向上装置2の制御系システム2Xは、システム全体の統括制御を司る制御装置30と、当該制御装置30の指令に応じて各種データが読書き可能にデータベース化されているデータ格納部31と、被検者の下肢動作に連動して能動的または受動的に駆動する駆動部12L、12R、13L、13Rとを有する。
図3は、動作機能向上装置2の制御系システムの構成を示すブロック図である。図3に示すように、動作機能向上装置2の制御系システム2Xは、システム全体の統括制御を司る制御装置30と、当該制御装置30の指令に応じて各種データが読書き可能にデータベース化されているデータ格納部31と、被検者の下肢動作に連動して能動的または受動的に駆動する駆動部12L、12R、13L、13Rとを有する。
また、駆動部12L、12R、13L、13Rにおけるアクチュエータの出力軸と同軸上には、当該出力軸の回転角度を検出するポテンショメータ32が設けられ、被検者の下肢動作に応じた関節角度を検出するようになされている。
さらに、下肢フレーム11には、 大腿部の鉛直方向に対する絶対角度を計測するための絶対角度センサ33が搭載されている。この絶対角度センサ33は、加速度センサおよびジャイロセンサから構成され、複数のセンサデータを用いて新しい情報を抽出する方法であるセンサフュージョンに用いられる。
大腿部の絶対角度の算出には、各センサにおける並進運動および温度ドリフトの影響を取り除くため、1次フィルタが使用される。この1次フィルタは、各センサから得られる値に対して重み付けを付与して加算されることで算出される。
大腿部の鉛直方向に対する絶対角度をθabs(k)、ジャイロセンサによって得られた角速度をω、サンプリング周期をdt 、加速度センサによって得られた加速度をαとすると、θabs(t)は、次の(1)式のように表される。

被検者の下肢動作に伴う関節を基準とする当該被検者の体表部位(主として大腿部の体表面)には生体信号検出センサ(電極群)を有する生体信号検出部40が配置されており、当該被検者の膝関節を動作させるための生体電位信号を検出するようになされている。
データ格納部31には、指令信号データベース41と基準パラメータデータベース42とが格納されている。制御装置30は、例えば、メモリを有するCPU(Central Processing Unit)チップで構成され、随意的制御部50と自律的制御部51とフェーズ特定部52とゲイン変更部53とを備えている。
随意的制御部50は、生体信号検出部40により取得された生体電位信号に基づいて、被検者の意思に従った動力を駆動部12L、12R、13L、13Rに発生させる。具体的に、随意的制御部50は、生体信号検出部40の検出信号に応じた指令信号を電力増幅部54に供給する。随意的制御部50は、生体信号検出部40に所定の指令関数f(t)またはゲインPを適用して指令信号を生成する。このゲインPは予め設定された値または関数であり、外部入力によるゲイン変更部53を介して調整することができる。
また、ポテンショメータ32により検出された膝関節の角度データに基づいてアクチュエータの駆動トルク(トルクの大きさおよび回動角度)を制御する方法を選択することも可能である。この方法は、被検者の運動症状に伴う歩行障害の度合いが比較的軽い場合や、被検者の皮膚が汗で濡れることが予想され、生体信号検出部40からの生体信号の入力が得られない可能性がある場合等に有効である。
ポテンショメータ32によって検出された膝関節角度のデータと、絶対角度センサ33によって検出された大腿部の鉛直方向に対する絶対角度のデータと、生体信号検出部40によって検出された生体信号とは、基準パラメータデータベース42に入力される。
また、一対の専用靴26L、26Rの足底には、FRF(Floor Reaction Force)センサ60が設けられ、被検者の左右の足裏面への圧力分布を検出する。このFRFセンサ60は、足裏面にかかる荷重を前足部(つま先部)と後足部(踵部)とに分割して独立して測定可能である。
このFRFセンサ60は、例えば、印加された荷重に応じた電圧を出力する圧電素子または荷重に応じて静電容量が変化するセンサなどからなり、体重移動に伴う荷重変化および装着者の脚と地面との接地の有無をそれぞれ検出することができる。
さらに一対の専用靴26L、26Rでは、各FRFセンサ60の検出結果に基づく左右の足裏面に係る荷重のバランスから、重心位置を求めることができる。このように一対の専用靴26L、26Rでは、被検者の左右の足のどちら側に重心が偏っているかを、各FRFセンサ60で計測されるデータに基づいて、推定することができる。
各専用靴26L、26Rは、靴構造以外に、FRFセンサ60とMCU(Micro Control Unit)からなるFRF制御部61と送信部62とを有する。FRFセンサ60の出力は、変換器63を介して電圧変換された後、LPF(Low Pass Filter)64を介して高域周波数帯が遮断されてFRF制御部61に入力される。
このFRF制御部61は、FRFセンサ60の検知結果に基づいて、被検者の体重移動に伴う荷重変化や接地の有無を求めると共に、左右の足裏に係る荷重バランスに応じた重心位置を求める。FRF制御部61は、求めた重心位置をFRFデータとして送信部62を介して装置本体内の受信部65にワイヤレス送信する。
制御装置30は、受信部65を介して各専用靴26L、26Rの送信部62からワイヤレス送信されたFRFデータを受信した後、当該FRFデータに基づく左右の足裏に係る荷重および重心位置がデータ格納部31の基準パラメータデータベース42に格納される。
フェーズ特定部52は、ポテンショメータ32により検出された膝関節角度のデータと、FRFセンサ60により検出された荷重のデータとを、基準パラメータデータベース42に格納された基準パラメータの膝関節角度および荷重と比較する。フェーズ特定部52は、この比較結果に基づいて、被検者の動作のフェーズを特定する。
そして、自律的制御部51は、フェーズ特定部52により特定されたフェーズの制御データを得ると、このフェーズの制御データに応じた指令信号を生成し、この動力を駆動部12L、12R、13L、13Rに発生させるための指令信号を電力増幅部54に供給する。
また、自律的制御部51は、前述したゲイン変更部53により調整されたゲインが入力されており、このゲインに応じた指令信号を生成し、電力増幅部54に出力する。電力増幅部54は、駆動部12L、12R、13L、13Rのアクチュエータを駆動する電流を制御してアクチュエータのトルクの大きさおよび回動角度を制御することにより、被検者の膝関節にアクチュエータによるアシスト力を付与する。
このように自律的制御部51は、関節周り検出部(ポテンショメータ32および絶対角度センサ33)により検出される物理量に基づいて、被検者の歩行タスクに応じた歩行フェーズをそれぞれ特定し、各歩行フェーズに対応する動力を駆動部12L、12R、13L、13Rに発生させる。
電力増幅部(駆動電流生成部)54は、随意的制御部50および自律的制御部51からの制御信号を合成し、当該合成された制御信号に応じた駆動電流を増幅して駆動部12L、12R、13L、13Rのアクチュエータに供給する。被検者の膝関節には、このアクチュエータのトルクが、アシスト力として下肢フレームを介して伝達される。
(4)本実施の形態による歩容状態認識装置の構成
本発明においては、上述した動作機能向上装置2を用いた歩容状態認識装置70(後述する図4)により、被検者の歩容状態を認識するようになされている。
本発明においては、上述した動作機能向上装置2を用いた歩容状態認識装置70(後述する図4)により、被検者の歩容状態を認識するようになされている。
その前提として、動作機能向上装置2を用いた測定された下肢筋の生体電位信号は、当該動作機能向上装置2を用いた歩行治療やリハビリテーションのたびに被検者の筋活動が測定されるため、被検者の歩容状態の認識に役立つ可能性がある。生体電位信号は、動作制御時に発生する活動電位に起因する被検者の神経筋系の変化を反映している。
本発明においては、被検者の両脚における股関節および膝関節の角度状態から計測される下肢の姿勢に着目し、歩行中の一歩ごとの情報を切り出して歩行周期の在り方から状態を計測することにより、歩行の特徴を得るようにする。
この歩容状態認識装置70は、上述した動作機能向上装置2における制御装置30内に設けられた制御系構成要素であり、図4に示すように、肢位情報算出部71、歩容構造分析部72、変遷比較解析部73および歩容状態認識部74を備える。
肢位情報算出部71は、上述した関節周り検出部(ポテンショメータ32および絶対角度センサ33)により検出される物理量に基づいて、被検者の股関節部を基準(原点位置)とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する。
なお本発明においては、肢位情報算出部71は、関節周り検出部により検出される物理量のみならず、当該物理量と被検者の左右の足裏面への圧力分布を検出する床反力センサ(FRFセンサ60)の検出結果とに基づいて、被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出するようにしてもよい。
歩容構造分析部72は、肢位情報算出部71による算出結果に基づいて、被検者の歩行周期ごとの歩容構造を分析する。具体的に、歩容構造分析部は、被検者の歩行周期ごとに歩行構造を構成する一連の動作フェーズの占有率をそれぞれ算出する。
ここで、被検者の歩行周期を構成する各動作フェーズは、図5(A)~(H)のように表される。すなわち、各動作フェーズは、被検者の左右いずれか一方の脚を支持脚とするとき、他方の脚のつま先部の高さと当該支持脚の踵部の高さが一致する接地点が形成されるときの第1支持脚フェーズwsp1(図5(A))と、当該接地点から前方の支持脚の膝下が地面に対して垂直になるときの第2支持脚フェーズwsp2(図5(B))と、当該支持脚の股関節が背側に伸展するときの第3支持脚フェーズwsp3(図5(C))と、当該支持脚の膝関節が緩み曲がるときの第4支持脚フェーズwsp4(図5(D))と、支持脚が遊脚に交代して接地点が形成されるときの第1遊脚フェーズwsw1(図5(E))と、当該接地点から前方の当該遊脚の大腿部が地面に対して垂直になるときの第2遊脚フェーズwsw2(図5(F))と、当該遊脚の踵部の前後位置が他方の脚と一致するときの第3遊脚フェーズwsw3(図5(G))と、当該遊脚の膝下部が地面に対して垂直になるときの第4遊脚フェーズwsw4(図5(H))とからなる。
上述の定義した歩行周期の状態遷移図は図6のように示される。フェーズ開始(またはタムアウト)wstから始まり、第1~第4支持脚フェーズwsp1~wsp4および第1~第4遊脚フェーズwsw1~wsw4からなる歩行周期を繰り返すようになされている。この状態遷移図において、第1支持脚フェーズwsp1と第1遊脚フェーズwsw1とを優先的に状態遷移するように設定することにより、途中の状態遷移で停滞することなく、一歩ごとの情報検出が可能となる。
変遷比較解析部73は、歩容構造分析部72による分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、当該比較結果を解析する。具体的に、変遷比較解析部73は、被検者の歩容状態の変遷を、歩容構造分析部72により算出された各動作フェーズの占有率を歩数ごとに列挙した第1グラフとして生成し、基準となる健常者に相当する第2グラフと時系列的に比較して、当該比較結果を解析する。
歩容状態認識部74は、変遷比較解析部73による解析結果に基づいて、被検者の歩容状態を認識する。具体的に、歩容状態認識部74は、変遷比較解析部73による解析結果に基づいて、被検者の歩容状態の変遷から当該被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出する。
このように、歩容状態認識装置70は、被検者の歩行周期ごとの歩容構造の分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較し、その比較結果を解析して被検者の歩容状態を認識する。
この結果、歩容状態認識装置70では、動作機能向上装置2における下肢運動のアシスト量調整のためのパラメータ設定を効率良く行うことが可能となる。
ここで図7(A)~(C)において、各動作フェーズに色を設定しておき、動作機能向上装置2の装着時における被検者の歩容状態の変遷を、当該被検者の左右の脚それぞれの1回の試行について、歩数を横軸、各動作フェーズの占有率を縦軸としてグラフ化したものを示す。図7(A)~(C)は、いずれも上段が左脚で下段が右脚についての歩容状態の変遷を表している。
図7(A)は健常者に相当する第2グラフであり、図7(B)は動作機能装置2の装着がなくても歩容可能な被検者に相当する第1グラフであり、図7(C)は日常では歩容困難な動作機能向上装置2の装着を始めた段階の被検者に相当する第1グラフである。この図7(A)に示す第2グラフによれば、健常者はほとんどの動作フェーズが常に検出されている一方、図7(B)および(C)に示す第1グラフによれば、双方とも被検者は疾患者であり、動作フェーズに抜けや歩行周期の不安定さが目視確認可能である。
例えば、図7(B)に示す第1グラフにおいて、第2支持脚フェーズwsp2および第3支持脚フェーズwsp3が欠落している場合、被検者の歩容中の着床時に足の位置が健常歩行と異なり、遊脚後の支持脚に入る接地時に当該支持脚における膝下が比較的大きな角度で曲がっている。これは被検者が恐る恐る歩くような感じで遊脚時に膝がしっかり伸びていないか、股関節の振りが小さいか、姿勢が前に傾いていると予想できる。
このような支持脚フェーズの抜けが生じる場合は、遊脚時の最後の振りをしっかり意識してもらうように被検者にアドバイスしたり、股関節の振り出しが足りない場合は、股関節の屈曲側の駆動トルクを大きくし、または膝関節の伸展側の駆動トルクを大きくなるように制御設定したりすることにより、被検者の歩容改善に寄与することができる。このように、歩容状態認識装置70では、被検者の歩容状態を可視化することが可能となる。
さらに、動作機能向上装置2の装着時における被検者の歩容状態の変遷を、当該被検者の左右の脚それぞれの1試行ごとにおける動作フェーズの占有率を平均化し、横軸を試行回数として、複数回の試行ごとの平均の歩行周期の変遷をグラフ化した典型的な例を図8から図10(B)までに示す。図8から図10(B)まで、いずれも上段が左脚で下段が右脚についての歩容状態の変遷を表している。
図8は健常者に相当するグラフを示し、当該グラフによれば、変化はあるものの全ての動作フェーズがどの試行でも見えている。一方、図9は、普段補装具を利用して歩行ができる脊髄損傷を患う被検者に相当するグラフを示し、当該グラフによれば、最初両足ともに動作フェーズの欠落があり、次に片足、最後は両足ともに綺麗に(健常者並みの)動作フェーズが見えている。これは脳卒中などの脳血管障害を患う一部の被検者にも同様な変遷をたどることが実験により示されている。
図10(A)は、脳卒中でぶん回し歩行の傾向が強い被検者に相当するグラフを示し、図10(B)は、図10(A)における複数回の試行ごとの平均の歩行周期の変遷に対応して、関節周り検出部(ポテンショメータ32および絶対角度センサ33)により検出される物理量(drive angle)を縦軸とするグラフを示す。
この図10(A)および(B)において、被検者の両足の動作フェーズが綺麗に(健常者並みに)見られていたにもかかわらず(変遷期間a)、途中から動作フェーズが欠落した後に再度当該動作フェーズが見られ(変遷期間b)、また同時に左右で関節角度に差異が生じる場合がある(変遷期間c)。
これは脳卒中を患う被検者によく生じるグラフ形状であり、途中で軽く歩く歩行状態(変遷期間a)から、とにかく速く歩く歩行などに目的が変わってしまい(変遷期間b)、普段されているぶん回し歩行の傾向が高くなってしまう場合である。この場合、支持脚の細かい動きである第2支持脚フェーズwsp2、第3支持脚フェーズwsp3および第4支持脚フェーズwsp4が小さく、遊脚が長く(第1遊脚フェーズwsw1から第4遊脚フェーズwsw4)、動作関節角度が大きい左足がロッキングされていると予測できる。
このような場合は、一旦ぶん回し歩行でも良いため被検者の歩行スピードを上げてスピードに慣れさせた後に、再度そのスピードを保ちつつ軽く歩く(変遷期間c)ように、課題をシフトさせる。
例えば、図11において、歩行周期を構成する一連の動作フェーズの様相と実際の状態と課題(解決方法)とを整理した図表を示す。この表によれば、動作フェーズの様相から動作機能向上装置2の装着時における歩容状態や課題を認識することが可能となる。なお、試行ごとの平均にしたとき、検出頻度が低い動作フェーズは、占有割合が小さいという形で見ることが可能である。
動作フェーズの様相が、第4支持脚フェーズwsp4および第4遊脚フェーズwsw4が多く、1試行内で安定せずにばらつきがある場合、実状態は、被検者の歩容が安定しておらず、非常にゆっくりとした歩行であると推測でき、課題としては、とにかく下肢を動かすこと、歩容に慣れてもらうことと特定できる。
また、動作フェーズの様相が、第2支持脚フェーズwsp2の検出頻度が低い場合(試行内で平均化すると小さく見える場合)、実状態は、被検者の脚振り出しの最後で膝が伸びきらないと推測でき、課題としては、被検者に足裏への体重を乗せることを意識してもらったり、遊脚時に股関節の振り出しをしっかりしてもらったり、遊脚の終わりの接地前に膝をしっかり伸ばしてもらうことと特定できる。
同様に、動作フェーズの様相が、第2支持脚フェーズwsp2の検出頻度が低い場合、もう一つの実状態は、体全体が前のめりで(左右いずれかに)傾いていると推測でき、課題としては、被検者の姿勢を良くしてもらったり、股関節の振り出しを大きくしてもらうことと特定できる。
さらに、動作フェーズの様相が、第3支持脚フェーズwsp3の検出頻度が低い場合、実状態は、被検者の股関節の伸展がしっかりできていないと推測でき、課題としては、動作機能向上装置2における設定で股関節伸展を優位にし、被検者に後ろに蹴るのを意識してもらうことと特定できる。
さらに、動作フェーズの様相が、第4支持脚フェーズwsp4の検出頻度が低い場合、実状態は、被検者の膝が緩んでおらず、ロッキング状態にあると推測でき、課題としては、被検者に膝を緩める練習をしてもらうことと特定できる。
さらに、動作フェーズの様相が、第2遊脚フェーズwsw2および第3遊脚フェーズwsw3の検出頻度が低い場合、実状態は、被検者の股関節が常に曲がっており、上半身が屈曲していると推測でき、課題としては、被検者に姿勢を意識してもらうように促しながら歩容を整えることと特定できる。
さらに、動作フェーズの様相が、第2遊脚フェーズwsw2および第3遊脚フェーズwsw3の検出が同時であり、かつ、第2遊脚フェーズwsw2の検出頻度が低い場合、実状態は、被検者の膝がロッキング状態であると推測でき、課題としては、被検者に膝を緩める練習をしてもらうことと特定できる。
さらに、動作フェーズの様相が、第4遊脚フェーズwsw4の検出頻度が低い場合、実状態は、被検者の股関節がしっかり屈曲する前に落ちてしまうと推測でき、課題としては、被検者の逆足の支持脚時に足裏への体重の乗せ方を意識してもらうことと特定できる。
同様に、動作フェーズの様相が、第4遊脚フェーズwsw4の検出頻度が低い場合、もう一つの実状態は、被検者の姿勢が前屈みもしくはロッキング状態であると推測でき、課題としては、被検者の姿勢を良くしてもらったり、股関節の振り出しを大きくしてもらうことと特定できる。
このように、歩容状態認識装置70では、歩行周期を構成する一連の動作フェーズを可視化することにより、被検者の歩容状態を可視化することが可能となる。そして、歩容状態認識装置70において、歩容状態認識部74は、変遷比較解析部73による解析結果に基づいて、被検者の歩容状態の変遷から当該被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出するようにした。この結果、歩容状態認識装置70では、被検者の歩行周期を構成する各動作フェーズの課題から、被検者自身が自己の歩行状態の問題点を一歩ごとに認識することが可能となる。
以上の構成による歩容状態認識装置70によれば、被検者の歩容状態を歩数に応じた時間経過の変遷として認識して、動作機能向上装置2における下肢運動のアシスト量調整のためのパラメータ設定を自動的に行うことができる。したがって、被検者の過去から現在の状況を把握し、さらには将来の状態を予測し、健常歩行に近づいていることを確認可能にすれば、従来セラピストが実施していたセラピーを自動的にサポートすることも可能となる。
(5)他の実施の形態
なお上述のように本実施の形態においては、歩容状態認識装置70では、歩行周期を構成する一連の動作フェーズを可視化するようにした場合について述べたが、本発明はこれに限らず、被検者の歩行中にすべての動作フェーズ(第1~第4支持脚フェーズwsp1~wsp4および第1~第4遊脚フェーズwsw1~wsw4)が検出されている割合を求めることにより、歩行状態がどの程度健常者に近いかを可視化して表示させることにより、被検者の歩容状態を容易に目視認識し得るようにしてもよい。
なお上述のように本実施の形態においては、歩容状態認識装置70では、歩行周期を構成する一連の動作フェーズを可視化するようにした場合について述べたが、本発明はこれに限らず、被検者の歩行中にすべての動作フェーズ(第1~第4支持脚フェーズwsp1~wsp4および第1~第4遊脚フェーズwsw1~wsw4)が検出されている割合を求めることにより、歩行状態がどの程度健常者に近いかを可視化して表示させることにより、被検者の歩容状態を容易に目視認識し得るようにしてもよい。
例えば、上述した図9や図10(A)に示すような複数回の試行ごとの平均の歩行周期の変遷をグラフ化したものに対して、床反力センサ(FRFセンサ60)による検出割合を重畳したグラフを図12に示す。図12は上段が左脚で下段が右脚についての歩容状態の変遷を表している。
この図12のグラフでは、左右の脚から得られる床反力センサ(FRFセンサ60)による検出割合と、すべての動作フェーズ(第1~第4支持脚フェーズwsp1~wsp4および第1~第4遊脚フェーズwsw1~wsw4)の占有率とを重畳させたものを表しており、横軸を試行回数、縦軸を歩行フェーズが綺麗な割合(0から1まで)とする。縦軸の歩行フェーズが綺麗な割合は、1に近くほど健常者の歩行に近い形になっていることを表している。この図12に示すグラフによれば、被検者の右脚が顕著に健常歩行に近づいていることがわかるとともに、被検者の左右の脚に歩行差が生じていることも確認できる。
また本実施の形態においては、歩容状態認識装置70では、歩行周期を構成する一連の動作フェーズを可視化して被検者の歩容状態を可視化するようにした場合について述べたが、本発明はこれに限らず、複数回の試行ごとに歩数に対して動作フェーズが欠落している回数を割合として計算し、例えば図13に示すヒートマップ図のような図表で表現するようにしても良い。この結果、被検者がどのような歩行をしており、何が課題となるかが目視認識し易くなる。また、被検者の歩容の特徴を予測することができ、改善すべき課題もかわり、被検者の意識付けにつなげることが可能となる。
さらに本実施の形態においては、歩容状態認識装置70では、歩容状態認識部74が被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出して、当該各動作フェーズの課題から、被検者自身が自己の歩行状態の問題点を一歩ごとに認識するようにした場合について述べたが、本発明はこれに限らず、歩容状態認識部74は、変遷比較解析部73による解析結果に基づいて、被検者の歩容状態の変遷と特定疾患に特有な歩行症状との相関関係を分析するようにしてもよい。この結果、歩容状態認識装置70では、当該相関関係の分析結果に基づいて、被検者が患う特定疾患を早期に発見することが可能となる。
さらに本実施の形態においては、被検者は歩行支援装置3のトレッドミル5上を歩行するようにしてリハビリテーションを支援するようにした場合について述べたが、本発明はこれに限らず、動作機能向上装置2を用いた被検者が移動可能な歩行器と一緒に歩行するようにしてもよい。
1…歩行支援システム、2…動作機能向上装置、2X…制御系システム、3…歩行支援装置、5…トレッドミル、6L…左フレーム、6R…右フレーム、7…歩行ベルト、8…モニタ、10…腰フレーム、11…下肢フレーム、12L、12R、13L、13R…駆動部、26L、26R…専用靴、30…制御装置、31…データ格納部、32…ポテンショメータ、33…絶対角度センサ、40…生体信号検出部、41…指令信号データベース、42…基準パラメータデータベース、50…随意的制御部、51…自律的制御部、52…フェーズ特定部、53…ゲイン変更部、54…電力増幅部、60…FRFセンサ、61…FRF制御部、62…送信部、63…変換器、64…LPF、65…受信部、70…歩容状態認識装置、71…肢位情報算出部、72…歩容構造分析部、73…変遷比較解析部、74…歩容状態認識部。
Claims (14)
- 被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する動作機能向上装置を用いて、前記被検者の歩容状態を認識する歩容状態認識装置において、
前記動作機能向上装置は、
前記被検者の下肢動作に連動して能動的または受動的に駆動する駆動部と、
前記駆動部からの出力信号に基づいて、前記被検者の下肢動作に伴う関節周りの物理量を検出する関節周り検出部と、
前記関節周り検出部により検出される物理量に基づいて、前記被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する肢位情報算出部と、
前記肢位情報算出部による算出結果に基づいて、前記被検者の歩行周期ごとの歩容構造を分析する歩容構造分析部と、
前記歩容構造分析部による分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、比較結果を解析する変遷比較解析部と、
前記変遷比較解析部による解析結果に基づいて、前記被検者の歩容状態を認識する歩容状態認識部と
を備えることを特徴とする歩容状態認識装置。 - 前記歩容構造分析部は、前記被検者の歩行周期ごとに歩行構造を構成する一連の動作フェーズの占有率をそれぞれ算出し、
前記変遷比較解析部は、前記被検者の歩容状態の変遷を、前記歩容構造分析部により算出された各前記動作フェーズの占有率を歩数ごとに列挙した第1グラフとして生成し、基準となる健常者に相当する第2グラフと時系列的に比較して、当該比較結果を解析する
ことを特徴とする請求項1に記載の歩容状態認識装置。 - 前記歩容状態認識部は、前記変遷比較解析部による解析結果に基づいて、前記被検者の歩容状態の変遷から当該被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出する
ことを特徴とする請求項1または2に記載の歩容状態認識装置。 - 前記歩容状態認識部は、前記変遷比較解析部による解析結果に基づいて、前記被検者の歩容状態の変遷と特定疾患に特有な歩行症状との相関関係を分析する
ことを特徴とする請求項1または2に記載の歩容状態認識装置。 - 前記被検者の歩行周期を構成する各動作フェーズは、
前記被検者の左右いずれか一方の脚を支持脚とするとき、他方の脚のつま先部の高さと当該支持脚の踵部の高さが一致する接地点が形成されるときの第1支持脚フェーズと、当該接地点から前方の支持脚の膝下が地面に対して垂直になるときの第2支持脚フェーズと、当該支持脚の股関節が背側に伸展するときの第3支持脚フェーズと、当該支持脚の膝関節が緩み曲がるときの第4支持脚フェーズと、前記支持脚が遊脚に交代して前記接地点が形成されるときの第1遊脚フェーズと、当該接地点から前方の当該遊脚の大腿部が地面に対して垂直になるときの第2遊脚フェーズと、当該遊脚の踵部の前後位置が他方の脚と一致するときの第3遊脚フェーズと、当該遊脚の膝下部が地面に対して垂直になるときの第4遊脚フェーズとからなる
ことを特徴とする請求項1または2に記載の歩容状態認識装置。 - 前記動作機能向上装置は、前記被検者の左右の足裏面への圧力分布を検出する床反力センサを有し、
前記肢位情報算出部は、前記関節周り検出部により検出される物理量および前記床反力センサの検出結果に基づいて、前記被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する
ことを特徴とする請求項1または2に記載の歩容状態認識装置。 - 前記動作機能向上装置は、
前記被検者の下肢動作に伴う関節を基準とする当該被検者の体表部位に配置され、当該被検者の生体電位信号を検出するための電極群を有する生体信号検出部と、
前記生体信号検出部により取得された生体電位信号に基づいて、前記被検者の意思に従った動力を前記駆動部に発生させる随意的制御部と、
前記関節周り検出部により検出される物理量に基づいて、前記被検者の歩行動作に応じた歩行フェーズをそれぞれ特定し、各前記歩行フェーズに対応する動力を前記駆動部に発生させる自律的制御部と、
前記随意的制御部および前記自律的制御部からの制御信号を合成し、当該合成された制御信号に応じた駆動電流を前記駆動部に供給する駆動電流生成部と
を備えることを特徴とする請求項1または2に記載の歩容状態認識装置。 - 被検者の歩行動作を構成する各歩行フェーズに応じた動力を当該被検者に付与する動作機能向上装置を用いて、前記被検者の歩容状態を認識する歩容状態認識方法において、
前記被検者の下肢動作に連動して能動的または受動的に駆動する駆動部が前記動作機能向上装置に設けられ、当該駆動部の出力信号に基づき検出された前記被検者の下肢動作に伴う関節周りの物理量に基づいて、前記被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する第1ステップと、
前記第1ステップによる算出結果に基づいて、前記被検者の歩行周期ごとの歩容構造を分析する第2ステップと、
前記第2ステップによる分析結果を歩数に応じた時間経過の変遷として、基準となる健常者から同様の当該分析結果として得られる歩数に応じた時間経過の変遷と時系列的に比較して、比較結果を解析する第3ステップと、
前記第3ステップによる解析結果に基づいて、前記被検者の歩容状態を認識する第4ステップと
を備えることを特徴とする歩容状態認識方法。 - 前記第2ステップでは、前記被検者の歩行周期ごとに歩行構造を構成する一連の動作フェーズの占有率をそれぞれ算出し、
前記第3ステップでは、前記被検者の歩容状態の変遷を、前記第2ステップにより算出された各前記動作フェーズの占有率を歩数ごとに列挙した第1グラフとして生成し、基準となる健常者に相当する第2グラフと時系列的に比較して、当該比較結果を解析する
ことを特徴とする請求項8に記載の歩容状態認識方法。 - 前記第4ステップでは、前記第3ステップによる解析結果に基づいて、前記被検者の歩容状態の変遷から当該被検者の歩行周期を構成する各動作フェーズの課題をそれぞれ抽出する
ことを特徴とする請求項8または9に記載の歩容状態認識方法。 - 前記第4ステップでは、前記第3ステップによる解析結果に基づいて、前記被検者の歩容状態の変遷と特定疾患に特有な歩行症状との相関関係を分析する
ことを特徴とする請求項8または9に記載の歩容状態認識方法。 - 前記被検者の歩行周期を構成する各動作フェーズは、
前記被検者の左右いずれか一方の脚を支持脚とするとき、他方の脚のつま先部の高さと当該支持脚の踵部の高さが一致する接地点が形成されるときの第1支持脚フェーズと、当該接地点から前方の支持脚の膝下が地面に対して垂直になるときの第2支持脚フェーズと、当該支持脚の股関節が背側に伸展するときの第3支持脚フェーズと、当該支持脚の膝関節が緩み曲がるときの第4支持脚フェーズと、前記支持脚が遊脚に交代して前記接地点が形成されるときの第1遊脚フェーズと、当該接地点から前方の当該遊脚の大腿部が地面に対して垂直になるときの第2遊脚フェーズと、当該遊脚の踵部の前後位置が他方の脚と一致するときの第3遊脚フェーズと、当該遊脚の膝下部が地面に対して垂直になるときの第4遊脚フェーズとからなる
ことを特徴とする請求項8または9に記載の歩容状態認識方法。 - 前記動作機能向上装置は、前記被検者の左右の足裏面への圧力分布を検出し、
前記第1ステップでは、前記関節周りの物理量および各前記足裏面への圧力分布に基づいて、前記被検者の股関節部を基準とする膝関節部、踵部およびつま先部の位置をそれぞれ算出する
ことを特徴とする請求項8または9に記載の歩容状態認識方法。 - 前記動作機能向上装置は、前記被検者の下肢動作に伴う関節を基準とする当該被検者の体表部位から取得された生体電位信号に基づいて、前記被検者の意思に従った動力を前記駆動部に発生させる随意的制御と、前記駆動部の出力信号に基づき検出された前記被検者の下肢動作に伴う関節周りの物理量に基づいて、前記被検者の歩行動作に応じた歩行フェーズをそれぞれ特定し、各前記歩行フェーズに対応する動力を前記駆動部に発生させる自律的制御とを合成して行い、当該合成された制御信号に応じた駆動電流を前記駆動部に供給する
ことを特徴とする請求項8または9に記載の歩容状態認識方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023011389A JP2024106902A (ja) | 2023-01-27 | 2023-01-27 | 歩容状態認識装置および歩容状態認識方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023011389A JP2024106902A (ja) | 2023-01-27 | 2023-01-27 | 歩容状態認識装置および歩容状態認識方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024106902A true JP2024106902A (ja) | 2024-08-08 |
Family
ID=92174643
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023011389A Pending JP2024106902A (ja) | 2023-01-27 | 2023-01-27 | 歩容状態認識装置および歩容状態認識方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2024106902A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119385557A (zh) * | 2025-01-03 | 2025-02-07 | 北京理工大学 | 一种基于脚部静电步态信号的异常步态矫正方法与装置 |
| CN119488422A (zh) * | 2024-10-16 | 2025-02-21 | 清华大学 | 助行架系统及力学数据分析方法 |
-
2023
- 2023-01-27 JP JP2023011389A patent/JP2024106902A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119488422A (zh) * | 2024-10-16 | 2025-02-21 | 清华大学 | 助行架系统及力学数据分析方法 |
| CN119385557A (zh) * | 2025-01-03 | 2025-02-07 | 北京理工大学 | 一种基于脚部静电步态信号的异常步态矫正方法与装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7181801B2 (ja) | 心臓リハビリテーション支援装置及びその制御プログラム | |
| US11622905B2 (en) | Proportional joint-moment control for powered exoskeletons and prostheses | |
| US12515312B2 (en) | Mobility based on machine-learned movement determination | |
| US12329661B2 (en) | Machine-learned movement determination based on intent identification | |
| US11654035B2 (en) | Gait disorder support apparatus and gait disorder support method | |
| JP7255392B2 (ja) | リハビリ支援システム、推定装置、学習装置、方法、プログラム、及び学習済みモデル | |
| Kawamoto et al. | Development of an assist controller with robot suit HAL for hemiplegic patients using motion data on the unaffected side | |
| Cherni et al. | Effects of body weight support and guidance force settings on muscle synergy during Lokomat walking | |
| JP2024106902A (ja) | 歩容状態認識装置および歩容状態認識方法 | |
| Nadeau et al. | Guiding task-oriented gait training after stroke or spinal cord injury by means of a biomechanical gait analysis | |
| Bae et al. | A mobile gait monitoring system for gait analysis | |
| US20250275858A1 (en) | Machine-learned movement determination based on intent identification | |
| Chaparro-Cárdenas et al. | Characterization of muscle fatigue in the lower limb by sEMG and angular position using the WFD protocol | |
| JP7759263B2 (ja) | 歩行機能評価装置およびその制御プログラム | |
| JP7759264B2 (ja) | 機能改善支援装置およびその制御プログラム | |
| Ryu et al. | Immediate effects of real-time visual bio-feedback using ground reaction forces on gait symmetry in elderly males | |
| Bayón et al. | Comparison of two design principles of unpowered ankle-foot orthoses for supporting push-off: a case study | |
| 洪境晨 | Dorsiflexion Control Strategy in High-Dorsiflexion Assistive Robot for Voluntary Effort Facilitation and Optimal Gait | |
| JP2024065996A (ja) | 動作機能向上装置および動作機能向上方法 | |
| Ruokolainen | Design Considerations for Lower-Limb Exoskeletons | |
| Gait | Clinical Assessment of Gait | |
| Nurse et al. | Enhancing Paretic Propulsion Post-Stroke via a Wearable System for Real-Time Unilateral Haptic Feedback of Anterior Ground Reaction Forces | |
| Rukina et al. | Principles of efficiency and safety assessment in using exoskeletons for patients with lower limb paralyses | |
| CN121983242A (en) | Nonlinear motion load and function rehabilitation training system based on multi-source data fusion | |
| Lovse | External sensors for the feedback control of functional electrical stimulation assisted walking |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20251205 |