JP2024118024A - 洗車装置 - Google Patents
洗車装置 Download PDFInfo
- Publication number
- JP2024118024A JP2024118024A JP2023024184A JP2023024184A JP2024118024A JP 2024118024 A JP2024118024 A JP 2024118024A JP 2023024184 A JP2023024184 A JP 2023024184A JP 2023024184 A JP2023024184 A JP 2023024184A JP 2024118024 A JP2024118024 A JP 2024118024A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- wash
- car wash
- control unit
- washing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
Abstract
【課題】ブラシからの圧力により車両表面に付着する砂や砂利などが当該表面に擦り傷を生じさせてしまうのではないかとの利用者の懸念を軽減し、利用者が安心して利用できる洗車装置を提供する。
【解決手段】洗車装置は、洗浄対象となる車両が出力した車両の状態に関する車両情報を取得する取得部と、車両の洗浄前に実行する水洗いに関する予洗計画を車両情報に基づいて立案する立案部と、予洗計画に基づいて車両を水洗いする洗浄装置を制御する制御部とを備える。
【選択図】図1
【解決手段】洗車装置は、洗浄対象となる車両が出力した車両の状態に関する車両情報を取得する取得部と、車両の洗浄前に実行する水洗いに関する予洗計画を車両情報に基づいて立案する立案部と、予洗計画に基づいて車両を水洗いする洗浄装置を制御する制御部とを備える。
【選択図】図1
Description
本発明は、洗車装置に関する。
乗用車等の車両を自動で洗浄する洗車装置が知られている。効率的な洗浄を行うために、例えば、洗浄対象となる車両から車両情報を取得して、当該車両に応じた洗浄処理を行う技術が知られている(例えば、特許文献1を参照)。
洗車装置による洗浄処理は、一般的には洗剤を含ませたブラシを車両表面に押し付けて回転させる処理を含み、利用者は、ブラシからの圧力により、車両表面に付着する砂や砂利などが当該表面に擦り傷を生じさせてしまうのではないかと恐れることが多かった。実際にもそのような擦り傷が生じることはしばしば報告されており、これにより洗車装置による洗車を諦めてしまう潜在的利用者も多く存在することが想像される。
本発明は、このような問題を解決するためになされたものであり、多くの利用者が安心して利用できる洗車装置を提供するものである。
本発明の具体的態様における洗車装置は、洗浄対象となる車両が出力した車両の状態に関する車両情報を取得する取得部と、車両の洗浄前に実行する水洗いに関する予洗計画を車両情報に基づいて立案する立案部と、予洗計画に基づいて車両を水洗いする洗浄装置を制御する制御部とを備える。
本発明により、多くの利用者が安心して利用できる洗車装置を提供することができる。
以下、発明の実施の形態を通じて本発明を説明するが、特許請求の範囲に係る発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。なお、各図において同一の符号を付したものは同一又は同様の構成を有し、同一又は同様の構成が複数存在する場合には、一部に符号を付して他を省く場合がある。
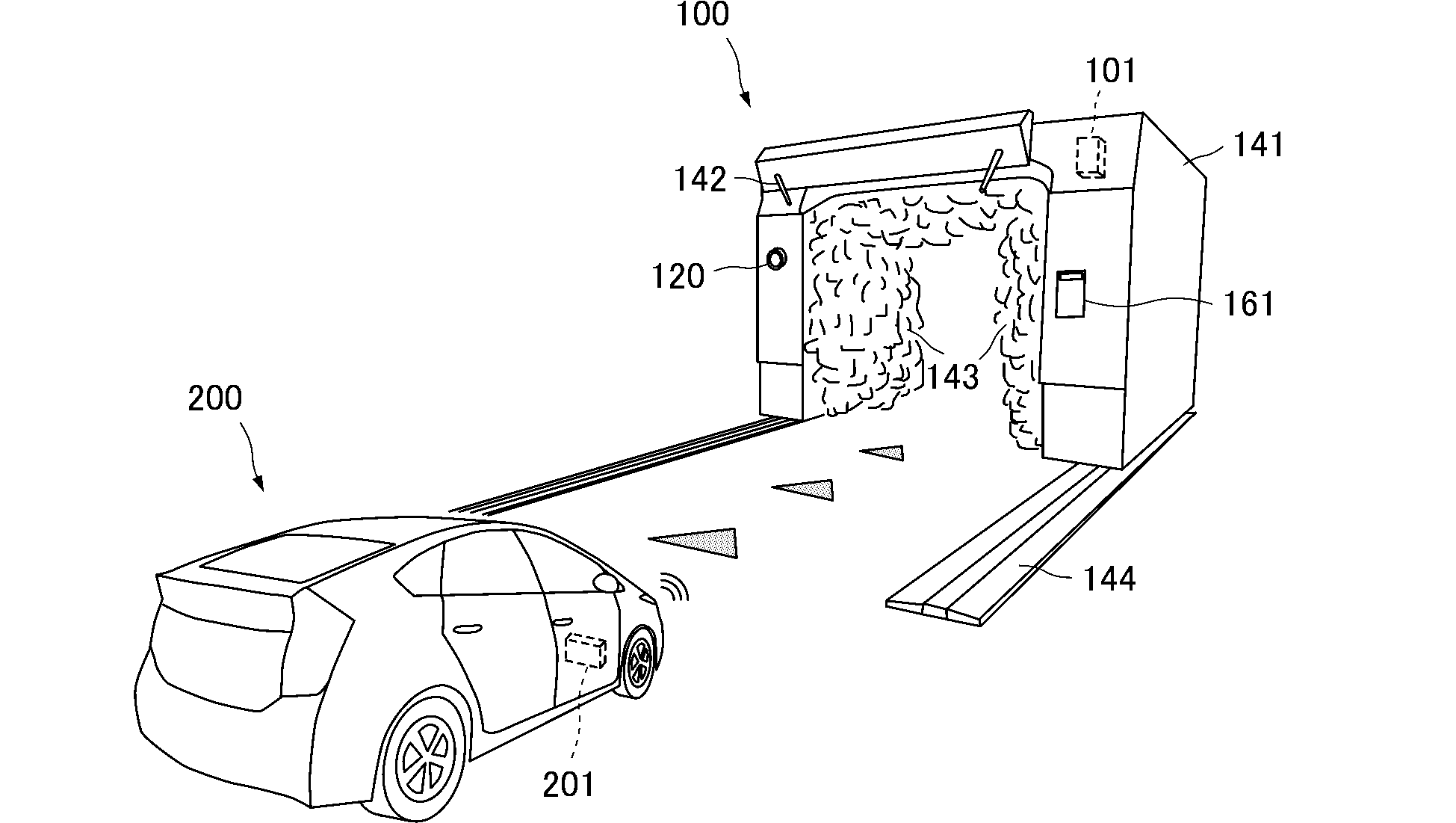
図1は、本実施形態に係る洗車装置100の利用状況を示す図である。洗車装置100は、車両200を自動的に洗浄する装置である。洗車装置100は、ゲートフレーム141、ノズル142、ブラシ143、走行レール144を備える。ノズル142は、図示するゲートフレーム141の上部の他にも所々に設置されており、通過する車両200やブラシ143へ向けて放水する。ブラシ143は、ゲートフレーム141の内側に沿って配置されており、洗浄時には車両200の表面に接触して回転したり揺動したりする。ゲートフレーム141は、所定位置に停止された車両200に対して前後するように、走行レール144上を移動する。
洗車装置100は、更にコントロールユニット101、カメラ120、操作パネル161を備える。コントロールユニット101は、例えば防水が施されたボックスに収容されてゲートフレーム141の背面に設置されている。コントロールユニット101は、各要素と電気的に接続された制御基板等を含み、自動洗浄の制御機能を担う。カメラ120は、例えばゲートフレーム141の側部に設置されている。カメラ120は、洗浄対象となる車両200を検出するための検出部を構成し、撮像した画像信号をコントロールユニット101へ送信する。操作パネル161は、例えばゲートフレーム141の側部に設置され、利用者や管理者の入力操作を受け付ける操作ボタンや、入力操作に応じた情報を表示する表示ユニットを含む。
車両200に乗車する利用者は、車両200を洗浄開始位置まで自走させる。コントロールユニット101は、車両200が洗浄開始位置に到達する「入庫」をカメラ120によって検出したら、車両200のコントロールユニット201に対して車両200車両の状態に関する車両情報を要求する。コントロールユニット101は、車両200から車両情報を取得すると、当該車両情報に基づいて、車両の洗浄前に行う水洗いである予洗に関する予洗計画と、予洗後に洗剤を用いて行う本洗に関する本洗計画とを立案し、それらの計画に沿って車両200に対して予洗および本洗を実行する。具体的な処理については後述する。
次に、洗車装置100のハードウェア構成について説明する。図2は、洗車装置100のうち本実施形態に関与する主なハードウェアの構成図である。洗車装置100は、主に、制御部110、カメラ120、洗浄装置140、記憶部150、入出力インタフェース160、通信ユニット170を備える。制御部110は、洗車装置100の制御とプログラムの実行処理を行うプロセッサ(CPU:Central Processing Unit)である。プロセッサは、ASICやGPU等の演算処理チップと連携する構成であってもよい。制御部110は、記憶部150に記憶された洗車制御プログラムを読み出して、車両の洗車に関する様々な処理を実行する。
カメラ120は、上述のようにゲートフレーム141に設置され、制御部110からの指示信号に応じて撮像した画像信号を制御部110へ送り返す。制御部110は、画像信号から形成される画像データを利用して、洗車対象となる車両200の存在や移動を検出する。すなわち、カメラ120は、制御部110と協働して、車両200を検出する検出部として機能する。
洗浄装置140は、ゲートフレーム141、ノズル142、ブラシ143、走行レール144の他、ポンプ、ドレイン、ドライヤ、各種センサ等の車両洗浄を実現する種々のユニットを含む。制御部110は、例えば走行レール144に沿ってゲートフレーム141を移動させるモータやブラシ143を回動させるモータへ駆動信号を送信したり、センサの出力信号を受信したりする。
記憶部150は、不揮発性の記憶媒体であり、例えばフラッシュメモリによって構成されている。記憶部150は、洗車装置100の制御や処理を実行するプログラムの他にも、種々のパラメータ等も記憶する。入出力インタフェース160は、操作パネル161を含み、利用者や管理者の入力操作を受け付けたり、洗車装置100の状態を表示したりする。通信ユニット170は、車両に搭載されたコントロールユニット201と通信可能な通信モジュールを含み、車両200との間で情報の授受を行う。なお、上述のコントロールユニット101は、制御部110、記憶部150、入出力インタフェース160、通信ユニット270を収容または支持している。
制御部110は、洗車プログラムが指示する処理に応じて様々な演算を実行する機能演算部としての役割も担う。制御部110は、通信ユニット170と協働して取得部111として機能する。取得部111は、例えば、洗浄対象となる車両200が出力した車両の状態に関する車両情報を取得する。また、制御部110は、車両200の洗浄に関して予洗計画や本洗計画を、取得部111が取得した車両情報に基づいて立案する立案部112として機能する。また、制御部110は、立案部112が立案した予洗計画や本洗計画に基づいて車両200を洗浄するように洗浄装置140を制御する洗浄制御部113として機能する。
次に、車両200のハードウェア構成について説明する。図3は、車両200のうち本実施形態に関与する主なハードウェアの構成図である。車両200は、主に、制御部210、センサ220、駆動装置240、記憶部250、入出力インタフェース260、通信ユニット270を備える。制御部210は、車両200の制御とプログラムの実行処理を行うプロセッサ(CPU:Central Processing Unit)である。プロセッサは、ASICやGPU等の演算処理チップと連携する構成であってもよい。
センサ220は、車両200の状態や周辺環境を監視する種々の監視素子を含み、例えば、車両200の走行距離やワイパー動作の有無を検出する。駆動装置240は、車両200を自走させるための装置であり、ガソリン車両であれば、駆動輪を駆動するガソリンエンジン等を含む。記憶部250は、不揮発性の記憶媒体であり、例えばソリッドステートドライブによって構成されている。記憶部250は、車両200の制御や処理を実行するプログラムの他にも、種々のパラメータ等も記憶する。
入出力インタフェース260は、利用者の入力操作を受け付けたり、車両200の状態を表示したりする入出力装置を含む。通信ユニット270は、洗車装置100の通信ユニット170と通信可能な通信モジュールを含み、洗車装置100との間で情報の授受を行う。なお、洗車装置100の通信ユニット170および車両200の通信ユニット270は、直接的に相互に通信を確立する近距離無線モジュールに限らず、インターネット網を介して接続される例えば無線LANモジュールなどであってもよい。なお、上述のコントロールユニット201は、制御部210、記憶部250、入出力インタフェース260、通信ユニット270を収容または支持している。
さて、洗車装置による洗浄処理は、一般的には洗剤を含ませたブラシを車両表面に押し付けて回転させる処理を含む。本実施形態に係る洗車装置100も、ブラシ143を回転させたり平行移動させたりして車両200を洗浄するタイプの装置である。このようなタイプの洗車装置に対して利用者は、ブラシからの圧力により、車両の表面に付着する砂や砂利などが当該表面に擦り傷を生じさせてしまうのではないかと心配することが多かった。そこで、本実施形態においては、多くの利用者が安心して利用できるよう、洗剤を用いた洗浄処理を開始する前に、取得した車両情報を用いて車両200の汚れ具合に応じた水洗い(予洗)を実行することにより、入庫時点において付着している砂や砂利などを適切に除去する。
車両情報を用いて予洗計画を立案する処理について説明する。図4は、予洗計画における状態係数を算出する概念を説明するための図である。状態係数は、例えば複数の汚れ係数を積算して算出される係数であり、基準として設定された予洗計画に対する強度を表すものである。
図4(A)は、汚れ係数αを決定する関数の三次元グラフを示す図である。汚れ係数αは、前回の洗車から経過した時間と、前回の洗車から走行した距離とを変数とする関数から算出される。汚れ係数αは、前回の洗車から経過した時間が増加するにつれ、また、前回の洗車から走行した距離が増加するにつれ、汚れ係数αが増大するような関数が適用されている。また、αは1.0以上の範囲で変動するように設定されている。
ここで、前回の洗車から経過した時間および前回の洗車から走行した距離は、車両情報に実質的に含まれる情報である。前回の洗車から経過した時間は、記憶部250に記録された洗車履歴情報から算出され、前回の洗車から走行した距離は、当該洗車履歴情報と距離計の記録情報から算出される。このとき、それぞれ算出された値が車両情報に含まれていてもよいし、算出される前の洗車履歴情報や距離計の記録情報が車両情報に含まれていてもよい。
図4(B)は、汚れ係数βを決定する関数の三次元グラフを示す図である。汚れ係数βは、前回の洗車から経過した時間と、前回の洗車からの走行時間のうち悪天候であった時間とを変数とする関数から算出される。汚れ係数αは、前回の洗車から経過した時間が増加するにつれ、また、前回の洗車から悪天候であった時間が増加するにつれ、汚れ係数βが増大するような関数が適用されている。また、βは1.0以上の範囲で変動するように設定されている。
ここで、前回の洗車から悪天候であった時間も、車両情報に実質的に含まれる情報である。前回の洗車から悪天候であった時間は、洗車履歴情報とワイパーの駆動時間の情報から算出される。このとき、算出された値が車両情報に含まれていてもよいし、算出される前のワイパーの駆動時間の情報が車両情報に含まれていてもよい。また、悪天候であった時間をワイパーの駆動時間ではなく、記録された気象情報等から算出してもよい。
状態係数は、汚れ係数α×汚れ係数βとして算出される。上述のように状態係数は、基準として設定された予洗計画に対する強度である。例えば、基準として設定された予洗時間が5.0分であり、状態係数が1.8であれば、車両200の予洗時間を5.0×1.8=9.0(分)とする。また、状態変数を用いて変化させる項目は予洗時間に限らず、例えばノズル142から噴出させる水の圧力等であってもよい。また、汚れ係数は、α、βに限らず、更に別項目をパラメータとして採用して汚れ係数γ、ε…を設定してもよい。その場合も、状態係数は、それらの積として算出すればよい。
算出された状態係数によって変更する予洗項目は、例えば予洗時間のように連続的に変化させるものに限らず、状態係数が予め設定された閾値を超えたか否かにより、動作を変更する予洗項目であっても構わない。例えば、車両200に対するブラシ143の接触動作を変更してもよい。図5は、状態係数が閾値を超えた場合の、上部ブラシ143aの接触動作を説明するための図である。
状態係数が閾値以下であれば、洗浄制御部113は、上部ブラシ143aを、車両200の上面を前方から後方へ向かって順次接触するように、一方向へ回転させつつ移動させる。一方で、状態係数が閾値を超えていれば、洗浄制御部113は、車両200の頂部を基準に前方と後方に分け、上部ブラシ143aを2段階で接触させる。
具体的には、図5(A)に示すように、洗浄制御部113は、第1段階として、上部ブラシ143aを車両200の頂部に接触させ、そこから、付着する砂等が前方へ向かって掻き上げられる向きに回転させつつ、上面に沿って順次接触するように前方へ向かって移動させる。更に第二段階として、上部ブラシ143aを車両200の頂部に接触させ、そこから、付着する砂等が後方へ向かって掻き上げられる向きに回転させつつ、上面に沿って順次接触するように後方へ向かって移動させる。このように上部ブラシ143aの動作を変更すれば、付着している砂等が多いと予想される状態においても、車両200の上面に傷を生じさせることなく、適切に当該砂等が除去されることが期待できる。
なお、更に状態係数の値に応じて、図5(A)(B)の動作を複数回実行するように設定したり、併用する放水の圧力を変化させたりしてもよい。複数回実行する場合には、例えば徐々に押圧力を増大させてもよい。また、閾値に応じてブラシ143の回転数を変化させたり、思料する洗剤の種類や液量を変化させたりしてもよい。また、エアの吹付けを併用してもよい。
次に、洗車装置100の処理手順を説明する。図6は、洗車装置100の処理手順を示すフロー図である。なお、以下のフローにおいては、これまで説明したすべての処理を説明するものではなく、洗車装置100が実行する主要な処理に限って説明するものである。
制御部110は、ステップS101で、洗浄対象となる車両200が入庫位置へ到達したことを検出したか否かを確認する。具体的には、カメラ120から画像信号を取得し、車両200が規定位置へ存在するかを検出する。制御部110は定期的にステップS101を実行し、入庫位置への到達が確認出来たらステップS102へ進む。
取得部111は、ステップS102で、通信ユニット170と車両200の通信ユニット270との間で通信を確立し、車両200に対して車両情報を要求する。そして、ステップS103で、車両200が出力した車両情報を取得できたか否かを確認する。取得できた場合はステップS104へ進み、取得できなかった場合はステップS106へ進む。なお、車両200との間で通信を確立できない場合も、ステップS106へ進む。
ステップS104へ進むと、立案部112は、取得部111が取得した車両200の車両情報に基づいて予洗計画を立案する。予洗計画は、具体的には図4および図5を用いて説明したように、状態係数を算出し、その値に応じた洗浄装置140の動作態様を決定するものである。本洗計画も予洗計画と同様に立案することができるが、車両情報に応じて変化させなくても構わない。立案部112は、予洗計画を立案したら洗浄制御部113へ引き渡す。
洗浄制御部113は、ステップS105で、予洗として予洗計画に沿った水洗いを実行し、その後に本洗を実行する。立案部112から本洗計画も引き渡された場合には、本洗は当該本洗計画に沿って実行する。本洗処理が終了したらステップS107へ進む。
ステップS103からステップS106へ進んだ場合には、洗浄制御部113は、基準として設定された予洗計画に沿った水洗いを実行し、その後に本洗を実行する。本洗処理が終了したらステップS107へ進む。
洗車処理が終了したら、ステップS107で、例えば終了音を発して洗車の終了を告知する。制御部110は、ステップS108で、利用者が車両200を退避させたか否かを確認する。退避が完了するまではステップS107、S108を繰り返し、退避が完了したら、一連の処理を終了する。
以上本実施形態を説明したが、車両情報の取得は、洗車装置100と車両200の間で直接的に通信を確立させて行う場合に限らず、インターネット網を介して行っても構わない。また、車両200の車両情報が、例えばインターネットに接続されたサーバに保管されている場合には、取得部111は、当該サーバから車両200の車両情報を取得してもよい。
また、本実施形態においては、車両情報に応じて基準として設定された予洗計画に対する強度を増大させる場合を説明したが、逆に減少させる場合を想定してもよい。例えば、車両情報に、汚泥の付着を妨げる表面コーティングや擦り傷に対する耐性が強化された表面コーティングが施されているとの情報が含まれるのであれば、汚れ係数として1.0未満の値を付与してもよい。その場合、表面コーティングの種類等に応じて値を変化させてもよい。
100…洗車装置、101…コントロールユニット、110…制御部、120…カメラ、140…洗浄装置、141…ゲートフレーム、142…ノズル、143…ブラシ、143a…上部ブラシ、144…走行レール、150…記憶部、160…入出力インタフェース、161…操作パネル、170…通信ユニット、200…車両、201…コントロールユニット、210…制御部、220…センサ、240…駆動装置、250…記憶部、260…入出力インタフェース、270…通信ユニット
Claims (1)
- 洗浄対象となる車両が出力した前記車両の状態に関する車両情報を取得する取得部と、
前記車両の洗浄前に実行する水洗いに関する予洗計画を前記車両情報に基づいて立案する立案部と、
前記予洗計画に基づいて前記車両を水洗いする洗浄装置を制御する制御部と
を備える洗車装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023024184A JP2024118024A (ja) | 2023-02-20 | 2023-02-20 | 洗車装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023024184A JP2024118024A (ja) | 2023-02-20 | 2023-02-20 | 洗車装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024118024A true JP2024118024A (ja) | 2024-08-30 |
Family
ID=92504427
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023024184A Pending JP2024118024A (ja) | 2023-02-20 | 2023-02-20 | 洗車装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2024118024A (ja) |
-
2023
- 2023-02-20 JP JP2023024184A patent/JP2024118024A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1705087A1 (en) | Robot arm type automatic car washing device | |
| JP2019527650A (ja) | 自動車の内室を清掃する方法及び装置 | |
| CN107953862A (zh) | 带手动及自动清洗的车载摄像头及其控制方法 | |
| JP2019509924A (ja) | 車両の窓を清掃するための装置を制御するシステムおよび方法 | |
| JPH04232148A (ja) | ウインドワイパ駆動用装置 | |
| CN109131251A (zh) | 一种无人洗车方法和装置 | |
| US20200207313A1 (en) | Method for controlling at least one washing device of at least one sensor situated on an outer contour of a vehicle | |
| JP2024118024A (ja) | 洗車装置 | |
| JP5148399B2 (ja) | 洗車機における車形検出方法及び車形検出装置 | |
| CN114347957A (zh) | 洗车方法、装置、存储介质及洗车系统 | |
| CN112373436B (zh) | 汽车挡风玻璃的清洗方法、装置、存储介质、设备及汽车 | |
| US20060065292A1 (en) | Automatic car wash with high pressure wand | |
| JP2021070387A (ja) | 車両処理装置 | |
| JP3584081B2 (ja) | 洗車装置 | |
| JP2023134850A (ja) | 洗車機 | |
| JP4021550B2 (ja) | 洗車機における車体のブラッシング方法および装置 | |
| JPS62286864A (ja) | 自走式門型洗車機による車輪洗浄方法 | |
| JP2699699B2 (ja) | 洗車機 | |
| JP4872965B2 (ja) | カスタムミラー検出装置および同装置を備えた洗車機 | |
| JP4739135B2 (ja) | 洗車機における洗車方法 | |
| JPH04121258A (ja) | 洗車機 | |
| JP7764230B2 (ja) | 洗車装置 | |
| JP7726029B2 (ja) | 洗車機、および洗車機の制御方法 | |
| JPH1111266A (ja) | 洗車機 | |
| JP4047465B2 (ja) | 洗車機 |