JP2024543764A - 患者コンソールの5つの自由度での位置決めシステム - Google Patents
患者コンソールの5つの自由度での位置決めシステム Download PDFInfo
- Publication number
- JP2024543764A JP2024543764A JP2024513677A JP2024513677A JP2024543764A JP 2024543764 A JP2024543764 A JP 2024543764A JP 2024513677 A JP2024513677 A JP 2024513677A JP 2024513677 A JP2024513677 A JP 2024513677A JP 2024543764 A JP2024543764 A JP 2024543764A
- Authority
- JP
- Japan
- Prior art keywords
- rotation device
- roll
- translation
- axis
- pitch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/303—Surgical robots specifically adapted for manipulations within body lumens, e.g. within lumen of gut, spine, or blood vessels
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract

ロボット外科手術システム用の患者コンソールは、ベース、ベースの上部に取り付けられ、垂直軸で上下運動をもたらすように構成された垂直リフト、垂直リフトの上部に取り付けられ、垂直軸を中心としたヨーの回転をもたらすように構成されたヨー回転装置、ヨー回転装置の上部に取り付けられ、垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置、ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置、および機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に並進装置に対してロールするように並進装置に取り付けられたロール回転装置を含むことができる。水平に対する並進軸およびロール軸の角度は、ピッチ回転装置によってもたらされるピッチの回転の関数とすることができる。並進軸およびロール軸の方向は、ヨー回転装置によってもたらされるヨーの回転の関数とすることができる。
【選択図】図1
【選択図】図1
Description
関連出願の相互参照
本願は、2021年11月30日に出願された米国仮出願第63/284,499号の優先権および利益を主張し、その全内容は参照によりその全体が本明細書に組み込まれる。
本願は、2021年11月30日に出願された米国仮出願第63/284,499号の優先権および利益を主張し、その全内容は参照によりその全体が本明細書に組み込まれる。
分野
本開示は、例えば、限定はしないが、腔内および単一部位の外科手術を含む低侵襲外科手術用のロボット外科手術システムに関する。
本開示は、例えば、限定はしないが、腔内および単一部位の外科手術を含む低侵襲外科手術用のロボット外科手術システムに関する。
背景
腔内および単一部位のロボット外科手術などの低侵襲外科手術は、従来のロボット外科手術と比較して大きな利点が得られる。例えば、腔内ロボット外科手術では、患者の生来の腔部の中にある位置にアクセスするのが困難な場所にアクセスするために、切開を行う必要はない。これにより、回復時間が劇的に短縮および/または排除され、処置の安全性が改善される。単一部位システムは、切開を最小限の単一部位に減らし、これにより、特定の処置に際して、他の方法ではより数の多い、アクセスを設けるための切開を減らす。
腔内および単一部位のロボット外科手術などの低侵襲外科手術は、従来のロボット外科手術と比較して大きな利点が得られる。例えば、腔内ロボット外科手術では、患者の生来の腔部の中にある位置にアクセスするのが困難な場所にアクセスするために、切開を行う必要はない。これにより、回復時間が劇的に短縮および/または排除され、処置の安全性が改善される。単一部位システムは、切開を最小限の単一部位に減らし、これにより、特定の処置に際して、他の方法ではより数の多い、アクセスを設けるための切開を減らす。
特定の腔内および単一部位のロボット外科手術システムが提案されている。そのようなシステムおよび関連する構成要素の例は、米国特許第10,881,422号明細書、ならびに米国特許出願公開第20210322046号明細書、同第20210322045号明細書、同第20190117247号明細書、同第20210275266号明細書、同第20210267702号明細書、同第20200107898号明細書、同第20200397457号明細書、同第202000397456号明細書、同第20200315645号明細書、および同第201962914226号明細書に見出すことができ、上記のすべては参照によりその全体が本明細書に組み込まれる。
従来の外科手術用ロボットおよびシステムは、一般に、それらの意図された目的にとって満足のいくものであると考えられてきた。しかしながら、当技術分野では、改善されたロボット外科手術システム、装置、方法、制御装置、および構成要素、特に腔内および単一部位の外科手術用に構成されたものが、依然として必要とされている。本開示は、例えば、そのような領域における改善を提供する。
概要
本開示の少なくとも1つの態様によれば、ロボット外科手術システム用の患者コンソールは、ベース、ベースの上部に取り付けられ、垂直軸で上下運動をもたらすように構成された垂直リフト、垂直リフトの上部に取り付けられ、垂直軸を中心としたヨーの回転をもたらすように構成されたヨー回転装置、ヨー回転装置の上部に取り付けられ、垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置、ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置、および機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に並進装置に対してロールするように並進装置に取り付けられたロール回転装置を含み得る。水平に対する並進軸およびロール軸の角度は、ピッチ回転装置によってもたらされるピッチの回転の関数とすることができる。並進軸およびロール軸の方向は、ヨー回転装置によってもたらされるヨーの回転の関数とすることができる。
本開示の少なくとも1つの態様によれば、ロボット外科手術システム用の患者コンソールは、ベース、ベースの上部に取り付けられ、垂直軸で上下運動をもたらすように構成された垂直リフト、垂直リフトの上部に取り付けられ、垂直軸を中心としたヨーの回転をもたらすように構成されたヨー回転装置、ヨー回転装置の上部に取り付けられ、垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置、ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置、および機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に並進装置に対してロールするように並進装置に取り付けられたロール回転装置を含み得る。水平に対する並進軸およびロール軸の角度は、ピッチ回転装置によってもたらされるピッチの回転の関数とすることができる。並進軸およびロール軸の方向は、ヨー回転装置によってもたらされるヨーの回転の関数とすることができる。
患者コンソールは、ロール回転装置に接続された機器コントローラアセンブリであって、機器コントローラアセンブリは、外科手術を実行するために医療装置を制御するための1つまたは複数の機器コントローラを含み、垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置は、機器コントローラアセンブリに5つの自由度をもたらす、機器コントローラアセンブリ、を含むことができる。特定の実施形態では、ベースは、追加の動きの自由度をもたらすために床に対して移動するように構成することができる。
患者コンソールは、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを可能にするように構成され得る。本明細書では、任意の他の適切な処置が企図される。
患者コンソールは、ベースに取り付けられ、垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置のそれぞれを制御するように構成されたユーザ入力装置を含むことができる。ユーザ入力装置は、垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置の各々を制御するためのグラフィカルユーザインターフェース(GUI)を有するディスプレイを含むことができる。GUIは、機器コントローラアセンブリの向きおよび位置を1つまたは複数の角度から示すように構成することができる。GUIは、任意の適切なデジタルボタン、入力、インジケータ、画像、テキスト、および/または他のコンテンツを有するように構成することができる。
本開示の少なくとも1つの態様によれば、ロボット外科手術システムは患者コンソールを含むことができる。患者コンソールは、例えば上述したように、本明細書に開示される任意の患者コンソールとすることができる。
本開示の少なくとも1つの態様によれば、ロボット医療処置を実行するための方法は、患者コンソールのベースの上部に取り付けられ、垂直軸で上下運動をもたらす垂直リフトを使用すること、垂直リフトの上部に取り付けられ、垂直軸を中心としたヨーの回転をもたらすヨー回転装置を使用すること、ヨー回転装置の上部に取り付けられ、垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置を使用すること、ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置を使用すること、および機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に並進装置に対してロールするように並進装置に取り付けられたロール回転装置を使用すること、を含むことができる。水平に対する並進軸およびロール軸の角度は、ピッチ回転装置によってもたらされるピッチの回転の関数とすることができる。並進軸およびロール軸の方向は、ヨー回転装置によってもたらされるヨーの回転の関数とすることができる。
方法は、外科手術を実行するために医療装置を制御するためにロール回転装置に接続された1つまたは複数の機器コントローラを有する機器コントローラアセンブリを使用すること、および垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置を使用して機器コントローラアセンブリに5つの自由度を設けることを含むことができる。方法は、追加の動きの自由度をもたらすために床に対して患者コンソールのベースを移動することを含む。方法は、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを含み得る。
方法は、垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置のそれぞれをユーザ入力装置で制御することを含むことができる。方法は、グラフィカルユーザインターフェース(GUI)を使用して、垂直リフト、ヨー回転装置、ピッチ回転装置、並進装置、およびロール回転装置のそれぞれを制御することを含むことができる。この方法は、任意の他の適切な方法および/またはその一部を含むことができる。
本開示の実施形態のこれらおよび他の特徴は、図面と併せて以下の詳細な説明から、当業者にとって、より容易に明らかになる。
本開示が関係する当業者が、過度の実験をすることなく本開示の装置および方法をいかに作製および使用するかを容易に理解するように、その実施形態を、特定の図を参照しながら本明細書の下部に詳細に説明する。
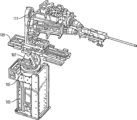
本開示による患者コンソールの実施形態の斜視図である。
5つのジョイントにおける5つの自由度を示す、図1の実施形態の概略図である。
動きの軸(例えば、A1、A2、A3、およびA4)を示す、図2に示す実施形態の概略図である。
5つの自由度を示す、図2の実施形態の別の図である。
図1の実施形態の立面図であり、格納位置で示している。
ベースおよび外側ハウジングを取り外した状態の位置決め構成要素を示す、図1の実施形態の斜視図である。
ベースおよび外側ハウジングを取り外した状態の患者コンソールの位置決め構成要素の別の実施形態の斜視図である。
患者コンソールのユーザ入力装置の実施形態のためのグラフィカルユーザインタフェース(GUI)の実施形態を示す。
第1のジョイントの制御、例えば、図示のような垂直リフトを示す。
第1のジョイントの制御、例えば、図示のような垂直リフトを示す。
第2のジョイント、例えば図示のようなヨー回転装置の制御を示す。
第2のジョイント、例えば図示のようなヨー回転装置の制御を示す。
第3のジョイント、例えば図示のようなピッチ回転装置の制御を示す。
第3のジョイント、例えば図示のようなピッチ回転装置の制御を示す。
第4のジョイント、例えば図示のような並進装置の制御を示す。
第4のジョイント、例えば図示のような並進装置の制御を示す。
第5のジョイント、例えば図示のようなロール回転装置の制御を示す。
第5のジョイント、例えば図示のようなロール回転装置の制御を示す。
本開示によるロボット外科手術システムの実施形態を示す。
詳細な説明
ここで図面を参照するが、同様の参照符号は、本開示の同様の構造的特徴または態様を同一視する。限定することではなく、説明および例示することが目的で、本開示によるシステムの実施形態の説明的な図が図1に示されており、全体として参照符号100で示されている。本開示の他の実施形態および/または態様を図2から13に示す。
ここで図面を参照するが、同様の参照符号は、本開示の同様の構造的特徴または態様を同一視する。限定することではなく、説明および例示することが目的で、本開示によるシステムの実施形態の説明的な図が図1に示されており、全体として参照符号100で示されている。本開示の他の実施形態および/または態様を図2から13に示す。
図1~図6を参照すると、ロボット外科手術システム用の患者コンソール100(例えば、カート)は、ベース101および位置決めアーム102を含むことができる。位置決めアーム102は、ベース101の上部に取り付けられ、垂直軸A1で上下運動をもたらすように構成された垂直リフト103(例えば、ジョイントJ1)を含むことができる。患者コンソール100は、垂直リフト103の上部に取り付けられ、垂直軸A1を中心としたヨーの回転をもたらすように構成されたヨー回転装置105(例えば、ジョイントJ2)を含むことができる。患者コンソール100は、垂直軸A1に直交するピッチ軸A2を中心としたピッチの回転をもたらすために、ヨー回転装置105の上部に取り付けられるピッチ回転装置107(例えば、ジョイントJ3)を含むことができる。患者コンソール100は、ピッチ回転装置107の上部に取り付けられ、並進軸A3に沿って摺動並進をもたらすように構成された並進装置109(例えば、ジョイントJ4)を含むことができる。患者コンソール100は、並進装置109に取り付けられ、並進装置109に対してロール軸A4を中心に回転して、機器コントローラアセンブリ113にロールをもたらすロール回転装置111(例えば、ジョイントJ5)を含むことができる。
水平に対する並進軸A3およびロール軸A4の角度は、ピッチ回転装置107によってもたらされるピッチの回転の関数とすることができる。並進軸A3およびロール軸A4の方向は、ヨー回転装置105によってもたらされるヨーの回転の関数とすることができる。
コンソール100は、ロール回転装置111に接続された機器コントローラアセンブリ113を含むことができ、機器コントローラアセンブリ113は、外科手術を実行するための医療装置(図示せず)を制御するための1つまたは複数の機器コントローラ115を含む。垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111は、例えば、機器コントローラアセンブリ113(したがって、それに取り付けられたオーバーチューブ117)に5つの自由度をもたらすことができる。特定の実施形態では、ベース101は、追加の動きの自由度をもたらすために床に対して移動するように構成することができる。
患者コンソール100は、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを可能にするように構成され得る。本明細書では、任意の他の適切な処置が企図される。
システム100は、ベース101に取り付けられ、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のそれぞれを制御するように構成されたユーザ入力装置119を含むことができる。図7をさらに参照すると、ユーザ入力装置119は、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111の各々を制御するためのグラフィカルユーザインターフェース(GUI)700を有するディスプレイ121(例えば、タッチスクリーン)を含むことができる。図示のように、GUI700は、機器コントローラアセンブリ113の向きおよび位置を1つまたは複数の角度から示すように構成することができる。GUI700は、任意の適切なデジタルボタン、入力、インジケータ、画像、テキスト、および/または他のコンテンツ(例えば、示されるような回転方向を示す矢印のボタン、および/または任意の他のインジケータおよび/または制御ボタン)を有するように構成することができる。
特定の実施形態では、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のうちの1つまたは複数は、例えば、ユーザ入力装置119に加えて遠隔外科医コンソールによって制御することができる。特定の実施形態では、ユーザ入力装置119は、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のすべてを制御することができ、遠隔外科医コンソールは、並進装置109およびロール回転装置111のみを制御することができる。
図1は、本開示による患者コンソールの実施形態の斜視図である。図2は、5つのジョイント(例えば、J1、J2、J3、J4、J5)における5つの自由度を示す、図1の実施形態の概略図である。図3は、5つの自由度を示す、図2の実施形態の別の図である。図4は、図1の実施形態の立面図であり、格納位置で示している。図5は、ベースおよび外側ハウジングを取り外した状態の位置決め構成要素を示す、図1の実施形態の斜視図である。図6は、ベースおよび外側ハウジングを取り外した状態の患者コンソールの位置決め構成要素の別の実施形態の斜視図である。図7は、患者コンソールのユーザ入力装置の実施形態のためのグラフィカルユーザインタフェース(GUI)の実施形態を示す。図8Aおよび図8Bは、第1のジョイント(例えば、図2に示すJ1)の制御、例えば、図示のような垂直リフトを示す。図9Aおよび図9Bは、第2のジョイント(例えば、図2に示すJ2)、例えば図示のようなヨー回転装置の制御を示す。図10Aおよび図10Bは、第3のジョイント(例えば、図2に示すJ3)、例えば図示のようなピッチ回転装置の制御を示す。図11Aおよび図11Bは、第4のジョイント(例えば、図2に示すJ4)、例えば図示のような並進装置の制御を示す。図12Aおよび図12Bは、第5のジョイント(例えば、図2に示すJ5)、例えばロール回転装置の制御を示す。
実施形態は、例えば、ロボット外科手術システムに使用することができる。本明細書では、使用のための任意の適切な使用および/または実施形態が企図されている。
実施形態は、患者コンソール100(例えば、患者カート)を位置決めする5つの自由度を含む。実施形態は、有利な自由度の積み重ねの次数を含むことができる。
実施形態は、オーバーチューブアーム200に取り付けられたオーバーチューブ117の位置に移動をもたらすことができる。実施形態は5つのジョイントを含むことができ、各ジョイントは特定の動きをもたらす。特定の実施形態では、ジョイント1(例えば、図2に示すJ1)は、0~400mm以内の上下運動をもたらすことができる。特定の実施形態では、ジョイント2(例えば、図2に示すJ2)は、-90~+150度以内の回転運動をもたらすことができる。特定の実施形態では、ジョイント3(例えば、図2に示すJ3)は、下方に0度~35度以内の傾斜運動をもたらすことができる。特定の実施形態では、ジョイント4(例えば、図2に示すJ4)は、0~400mm以内の並進運動をもたらすことができる。特定の実施形態では、ジョイント5(例えば、図2に示すJ5)は、-170度~+170度以内のロール運動をもたらすことができる。
特定の実施形態では、全ジョイントが、患者コンソール100のタッチスクリーンを使用して看護師によって制御され得る。ジョイント4およびジョイント5は、外科医が外科医用コンソール(図示せず)のハンド制御装置およびオーバーチューブペダルを使用することによって、制御することができる。
特定の実施形態は、タッチスクリーン(例えば、ディスプレイ121)、ベースカートハンドル123、およびスタビライザ(図示せず)を有するインターフェース(例えば、ユーザ入力装置119)を含むことができる。特定の実施形態は、駆動制御スイッチを用いた患者コンソール100システムの可動性、およびベースカートハンドル123に加えられる力の方向の制御を有効にすることができる。特定の実施形態は、駆動制御スイッチが半押しされて保持されたときにのみ、ベースカートハンドル123を介した制御が起動されることを可能にすることができる。特定の実施形態は、手術中の望ましくない移動を防止するために、タッチスクリーンを介してスタビライザを作動させることによって固定することができる。
ユーザ入力装置119の実施形態を使用して、位置決めアーム102および患者コンソール100を制御することができる。ユーザ入力装置の実施形態は、患者コンソール100の状態を示すことができる。ユーザ入力装置119の実施形態は、ベースカートおよびそのタッチスクリーンの設定メニューを設けることができる。ユーザ入力装置119の実施形態は、位置決めアーム102の動きを制御するためのボタンを表示することができる。
タッチスクリーンGUI700の実施形態は、電源がオンになったときに直ちに表示し、患者コンソール100およびタッチスクリーンを初期化するローディングユーザインターフェースを含むことができる。GUIは、例えば、ポーズ設定、患者カート、および診断へのアクセスメニューボタンを備えるホーム画面を含むことができる。GUI700の実施形態は、患者コンソール100の詳細な設定を与えてモビリティに関連する値を調整する患者カート設定画面を含むことができる。GUI700は、タッチ画面の明るさを調整するための設定メニューを設けている設定画面を含むことができる。GUI700は、位置決めアーム102の各ジョイントのポーズ設定を調整するためのタッチボタンを設けるポーズ設定画面を含むことができる。図7において、GUI700には、多様なモードの例示的なインジケータが設けられている。GUIの実施形態は、患者コンソール100を移動させ得るか否かを示すモビリティインジケータを含むことができる。実施形態は、緑色およびオレンジ色の2色でシステムの正常または異常な状態を示すエラーインジケータを含むことができる。エラーが発生した場合、オレンジ色が表示され得る。
緊急停止インジケータは、緊急停止の起動を示すことができる。緊急停止が起動されると、アイコンをオレンジ色および赤色に変更することができる。実施形態は、ホーム画面に戻る機能を備えることができるホームボタンを含むことができる。実施形態は、設定メニューを起動する機能を備える設定ボタンを含むことができる。実施形態は、患者コンソール100のスタビライザを作動/停止させる機能を備えるスタビライザ入/切ボタンを含むことができる。
特定の実施形態では、ユーザは、位置決めアーム102のタッチスクリーン制御装置を使用して、位置決めアーム102を必要な対象領域に移動させることができる。ユーザは、オーバーチューブ117を患者に挿入し、次に位置決めアーム102を動かしてオーバーチューブ117と位置合わせすることができる。次いで、ユーザは、オーバーチューブ117をオーバーチューブアーム200に接続し、ノブを締めることができる。
ユーザは、患者コンソール100に設けられたタッチスクリーン制御装置を使用して、位置決めアーム102を制御することができる。ユーザは、タッチスクリーンに設けられたボタンを押して、位置決めアーム102の各ジョイントを動かすことができる。位置決めアーム102は、5つの動きの自由度を設けることができる。ユーザは、タッチスクリーンに示されているボタンを押したままにして、ジョイントを指定された方向に動かすことができる。ユーザは、タッチスクリーンボタンを放して位置決めアーム102の移動を停止することができる。表1は、各ジョイントJ1~J5によってもたらされる動きの実施形態を示す。
特定の実施形態では、外科医は、外科医コンソールのオーバーチューブペダルと共にハンド制御装置を使用して、位置決めアーム102のジョイント4(例えば、J4)およびジョイント5(例えば、J5)を制御することができる。本明細書では、任意の適切な他の制御スキームが企図される。
本開示の少なくとも1つの態様によれば、図13を参照すると、ロボット外科手術システム1300は患者コンソール100を含むことができる。患者コンソール100は、例えば上述したように、本明細書に開示される任意の患者コンソールとすることができる。ロボット外科手術システム1300は、外科医が患者コンソール100(例えば、無線または有線の接続を介して)に接続された1つまたは複数のコントローラを遠隔操作して、ロボット外科手術または他の適切な医療処置を実行することを可能にするように構成された外科医コンソール200を含むことができる。本明細書では、任意の適切な外科医コンソール200および/または制御入力が考えられる。特定の実施形態では、外科医コンソール200は、患者コンソール100に取り付けられた医療機器をインサイチュに位置決めするために、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のうちの1つまたは複数の制御を可能にするように構成することができる。例えば、ロール回転装置111は、医療装置、カメラ、および/またはオーバーチューブ117の遠位端をインサイチュで回転させるべく、軸A4を中心としたオーバーチューブ117(1つまたは複数の医療機器および/またはカメラを含む)の回転を可能にするために、外科医コンソール200の1つまたは複数のハンドコントロールによって操作されるように、構成することができる。
本開示の少なくとも1つの態様によれば、ロボット医療処置を実行するための方法は、患者コンソールのベース101の上部に取り付けられ、垂直軸A1で上下運動をもたらす垂直リフト103を使用すること、垂直リフト103の上部に取り付けられ、垂直軸A1を中心としたヨーの回転をもたらすヨー回転装置105を使用すること、ヨー回転装置105の上部に取り付けられ、垂直軸A1に直交するピッチ軸A2を中心としたピッチの回転をもたらすように構成されたピッチ回転装置107を使用すること、ピッチ回転装置107の上部に取り付けられ、並進軸a3に沿って摺動並進をもたらすように構成された並進装置109を使用すること、および機器コントローラアセンブリ113にロールをもたらすために、ロール軸A4を中心に並進装置109に対してロールするように並進装置109に取り付けられたロール回転装置111を使用すること、を含むことができる。水平に対する並進軸A3およびロール軸A4の角度は、ピッチ回転装置107によってもたらされるピッチの回転(軸A2を中心とする)の関数とすることができる。並進軸A3およびロール軸A4の方向は、ヨー回転装置105によってもたらされる、垂直軸A1を中心とするヨーの回転の関数とすることができる。
本方法は、外科手術を実行するために医療装置を制御するためにロール回転装置111に接続された1つまたは複数の機器コントローラ115を有する機器コントローラアセンブリ113を使用すること、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111を使用して機器コントローラアセンブリ113に5つの自由度を設けることを含むことができる。方法は、患者コンソール100のベース101を床(患者コンソール100が立っている床)に対して移動させて、さらなる動きの自由度をもたらすことを含むことができる。方法は、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを含み得る。
方法は、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のそれぞれをユーザ入力装置で制御することを含むことができる。方法は、グラフィカルユーザインターフェース(GUI)を使用して、垂直リフト103、ヨー回転装置105、ピッチ回転装置107、並進装置109、およびロール回転装置111のそれぞれを制御することを含むことができる。この方法は、任意の他の適切な方法および/またはその一部を含むことができる。
当業者には理解されるように、本開示の態様は、システム、方法、またはコンピュータプログラム製品として具現化され得る。したがって、本開示の態様は、完全にハードウェアの実施形態、完全にソフトウェアの実施形態(ファームウェア、常駐ソフトウェア、マイクロコードなどを含む)、またはソフトウェアとハードウェアの態様を組み合わせた実施形態の形態をとることができ、そのすべての可能性は、本明細書では「回路」、「モジュール」、または「システム」と呼ぶことがある。「回路」、「モジュール」、または「システム」は、「回路」、「モジュール」、または「システム」の開示された機能を一緒に実行することができる1つまたは複数の別個の物理ハードウェアおよび/またはソフトウェア構成要素の1つまたは複数の部分を含むことができるか、あるいは「回路」、「モジュール」、または「システム」は、(例えば、ハードウェアおよび/またはソフトウェアの)単一の自己完結型ユニットとすることができる。さらに、本開示の態様は、コンピュータ可読プログラムコードが具現化された1つまたは複数のコンピュータ可読媒体で具現化されたコンピュータプログラム製品の形態をとることができる。
1つまたは複数のコンピュータ可読媒体の任意の組み合わせを利用することができる。コンピュータ可読媒体は、コンピュータ可読信号媒体またはコンピュータ可読記憶媒体であってもよい。コンピュータ可読記憶媒体は、例えば、電子、磁気、光学、電磁気、赤外線、もしくは半導体のシステム、器機、もしくは装置、またはこれらの任意の適切な組み合わせであってもよいが、これらに限定されない。コンピュータ可読記憶媒体のより具体的な例(非網羅的な列挙)には、以下の、1つまたは複数の配線を有する電気的接続、ポータブルコンピュータディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、読み出し専用メモリ(ROM)、消去可能プログラマブル読み出し専用メモリ(EPROMまたはフラッシュメモリ)、光ファイバ、ポータブルコンパクトディスク読み出し専用メモリ(CD-ROM)、光記憶装置、磁気記憶装置、またはこれらの任意の適切な組み合わせが含まれる。本明細書の文脈では、コンピュータ可読記憶媒体は、命令実行システム、器機、または装置によって、またはそれに関連して使用するためのプログラムを含むか、または記憶することができる任意の有形媒体であってもよい。
コンピュータ可読信号媒体は、例えばベースバンドにおいて、または搬送波の一部として、コンピュータ可読プログラムコードが内部に具現化された伝搬データ信号を含むことができる。そのような搬送信号は、電磁気、光学、またはそれらの任意の適切な組み合わせを含むがこれらに限定されない様々な形態のいずれかをとることができる。コンピュータ可読信号媒体は、コンピュータ可読記憶媒体ではなく、命令実行システム、器機、または装置によって、またはそれらと関連して使用するためのプログラムを、通信、伝播、または輸送することができる任意のコンピュータ可読媒体であってもよい。
コンピュータ可読媒体に具現化されたプログラムコードは、無線、有線、光ファイバケーブル、RFなど、またはこれらの任意の適切な組み合わせを含むがこれらに限定されない任意の適切な媒体を使用して、送信され得る。
本開示の態様のための動作を実行するためのコンピュータプログラムコードは、Java、Smalltalk、C++などのオブジェクト指向プログラミング言語、および「C」プログラミング言語または同様のプログラミング言語などの従来の手続き型プログラミング言語を含む、1つまたは複数のプログラミング言語の任意の組み合わせで記述することができる。プログラムコードは、全面的にユーザのコンピュータで、部分的にユーザのコンピュータで、スタンドアロンソフトウェアパッケージとして、部分的にユーザのコンピュータで、部分的にリモートコンピュータで、または完全にリモートコンピュータもしくはサーバで、実行することができる。後者のシナリオでは、リモートコンピュータは、ローカルエリアネットワーク(LAN)またはワイドエリアネットワーク(WAN)を含む任意のタイプのネットワークを介してユーザのコンピュータに接続されてもよく、または外部コンピュータに(例えば、インターネットサービスプロバイダを使用してインターネットを介して)接続され得る。
本開示の態様は、本開示の実施形態による方法、器機(システム)、およびコンピュータプログラム製品のフローチャートの図解および/またはブロック図を参照して、上述されている場合がある。任意のフローチャートの図解および/またはブロック図の各ブロック、ならびに任意のフローチャートの図解および/またはブロック図のブロックの組み合わせは、コンピュータプログラム命令によって実施することができることが理解されよう。これらのコンピュータプログラム命令は、コンピュータまたは他のプログラム可能なデータ処理器機のプロセッサを介して実行される命令が、任意のフローチャートおよび/またはブロック図の1つまたは複数のブロックで指定された機能/動作を実施するための手段を作成するように、機械を製造するべく、汎用コンピュータ、専用コンピュータ、または他のプログラム可能なデータ処理器機のプロセッサに与えることができる。
これらのコンピュータプログラム命令はまた、コンピュータ、他のプログラム可能なデータ処理器機、または他の装置に特定の方法で機能するように指示することができるコンピュータ可読媒体に格納され得、コンピュータ可読媒体に格納された命令は、フローチャートおよび/またはブロック図の1つまたは複数のブロックで指定された機能/動作を実施する命令を含む製品を製造するようにする。
コンピュータプログラム命令はまた、コンピュータまたは他のプログラマブルな器機で実行される命令が本明細書で述べられた機能/動作を実施するためのプロセスを実行するように、コンピュータ、他のプログラマブルな器機、または他の装置で一連の動作ステップを実行させて、コンピュータ実装プロセスを生成するために、コンピュータ、他のプログラマブルなデータ処理器機、または他の装置に搭載され得る。
当業者は、本明細書に開示される任意の数値が正確な値であり得るか、またはある範囲内の値であり得ることを理解する。さらに、本開示で使用されている任意の近似の用語(例えば、「約(about)」、「約(approximately)」、「約(around)」)は、ある範囲内の記載された値を意味することができる。例えば、特定の実施形態では、範囲は、20%以内(プラスまたはマイナス)、または10%以内、または5%以内、または2%以内、または当業者によって理解されるような任意の他の適切なパーセンテージまたは数以内(例えば、既知の許容される限界または誤差の範囲について)であり得る。
本明細書および添付の特許請求の範囲で使用される冠詞「a」、「an」、および「the」は、文脈が明らかにそうでないことを示さない限り、本明細書では、その冠詞の文法的対象の1つまたは複数(すなわち、少なくとも1)を指すために使用される。例として、「要素(an element)」は、1つまたは複数の要素を意味する。
「および/または」という句は、この本明細書および特許請求の範囲で使用される場合、そのように結合された要素、すなわち、場合によっては連言的に存在し、他の場合には選言的に存在する要素の「いずれかまたは両方」を意味すると理解されるべきである。「および/または」で列挙された複数の要素は、同じように、すなわちそのように結合された要素の「1つまたは複数」と解釈されるべきである。「および/または」節によって具体的に特定される要素以外に、具体的に特定される要素に関連するか関連しないかにかかわらず、他の要素が任意選択的に存在し得る。したがって、非限定的な例として、「Aおよび/またはB」という言及は、「含む(comprising)」などのオープンエンドな文言と組み合わせて使用される場合、一実施形態ではAのみ(B以外の要素を任意選択的に含む)、別の実施形態ではBのみ(任意選択的にA以外の要素を含む)、さらに別の実施形態ではAとBの両方(任意選択的に他の要素を含む)などを指すことができる。
「または」は、この本明細書および特許請求の範囲で使用される場合、上で定義された「および/または」と同じ意味を有すると理解されるべきである。例えば、リスト内の項目を分ける場合、「または」または「および/または」は、包括的であると解釈されるべきであり、すなわち、複数の要素または要素のリストのうちの少なくとも1つを含むが、1つより多いものも含む、および、任意選択的に、追加の列挙されていない項目を含むと解釈されるべきである。「のうちの1つのみ(only one of)」または「のうちの厳密に1つ(exactly one of)」、または特許請求の範囲で使用される場合の「からなる」などの、反対であることが明確に示されている用語のみが、複数の要素または要素のリストのうちの厳密に1つの要素を含んでいることを指す。一般に、本明細書で使用される「または」という用語は、「いずれか」、「のうちの1つ」、「のうちの1つのみ」、または「のうちの厳密に1つ」などの排他的な用語が先行する場合、排他的な選択肢(すなわち、「両方ではなく一方または他方」)を示すとして解釈されるものとする。
任意の開示された実施形態の任意の適切な組み合わせおよび/またはその任意の適切な部分は、本開示を考慮して当業者によって理解されるように、本明細書で企図される。
本開示の実施形態は、上述され、図面に示されるように、それらが関連する技術の改善をもたらす。本開示は特定の実施形態の言及を含むが、当業者は、本開示の趣旨および範囲から逸脱することなく変更および/または修正を行うことができることを容易に理解されよう。
Claims (20)
- ロボット外科手術システム用の患者コンソールであって、
ベース、
前記ベースの上部に取り付けられ、垂直軸で上下運動をもたらすように構成された垂直リフト、
前記垂直リフトの上部に取り付けられ、前記垂直軸を中心としたヨーの回転をもたらすように構成されたヨー回転装置、
前記ヨー回転装置の上部に取り付けられ、前記垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置、
前記ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置、および
機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に前記並進装置に対してロールするように前記並進装置に取り付けられたロール回転装置であって、水平に対する前記並進軸および前記ロール軸の角度は、前記ピッチ回転装置によってもたらされる前記ピッチの回転の関数であり、前記並進軸および前記ロール軸の方向は、前記ヨー回転装置によってもたらされる前記ヨーの回転の関数である、ロール回転装置
を備える、患者コンソール。 - 前記ロール回転装置に接続された機器コントローラアセンブリであって、前記機器コントローラアセンブリは、外科手術を実行するために医療装置を制御するための1つまたは複数の機器コントローラを含み、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置は、前記機器コントローラアセンブリに5つの自由度をもたらす、機器コントローラアセンブリ、をさらに含む、請求項1に記載の患者コンソール。
- 前記ベースは、追加の動きの自由度をもたらすために床に対して移動するように構成される、請求項2に記載の患者コンソール。
- 前記患者コンソールが、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを可能にするように構成される、請求項3に記載の患者コンソール。
- 前記ベースに取り付けられ、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置のそれぞれを制御するように構成されたユーザ入力装置をさらに含む、請求項1に記載の患者コンソール。
- 前記ユーザ入力装置は、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置の各々を制御するためのグラフィカルユーザインターフェース(GUI)を有するディスプレイを含む、請求項5に記載の患者コンソール。
- 前記GUIは、前記機器コントローラアセンブリの向きおよび位置を1つまたは複数の角度から示すように構成される、請求項6に記載の患者コンソール。
- ロボット外科手術システムであって、
ロボット外科手術システム用の患者コンソールであって、
ベース、
前記ベースの上部に取り付けられ、垂直軸で上下運動をもたらすように構成された垂直リフト、
前記垂直リフトの上部に取り付けられ、前記垂直軸を中心としたヨーの回転をもたらすように構成されたヨー回転装置、
前記ヨー回転装置の上部に取り付けられ、前記垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置、
前記ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置、および
機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に前記並進装置に対してロールするように前記並進装置に取り付けられたロール回転装置であって、水平に対する前記並進軸および前記ロール軸の角度は、前記ピッチ回転装置によってもたらされる前記ピッチの回転の関数であり、前記並進軸および前記ロール軸の方向は、前記ヨー回転装置によってもたらされる前記ヨーの回転の関数である、ロール回転装置
を備える、患者コンソール
を備える、ロボット外科手術システム。 - 前記患者コンソールが、前記ロール回転装置に接続された機器コントローラアセンブリであって、前記機器コントローラアセンブリは、外科手術を実行するために医療装置を制御するための1つまたは複数の機器コントローラを含み、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置は、前記機器コントローラアセンブリに5つの自由度をもたらす、機器コントローラアセンブリ、をさらに含む、請求項8に記載のロボット外科手術システム。
- 前記ベースは、追加の動きの自由度をもたらすために床に対して移動するように構成される、請求項9に記載のロボット外科手術システム。
- 前記患者コンソールが、経肛門処置、経口処置、または経膣処置のための医療装置の位置決めを可能にするように構成される、請求項10に記載のロボット外科手術システム。
- 前記患者コンソールが、前記ベースに取り付けられ、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置のそれぞれを制御するように構成されたユーザ入力装置をさらに含む、請求項8に記載のロボット外科手術システム。
- 前記ユーザ入力装置は、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置の各々を制御するためのグラフィカルユーザインターフェース(GUI)を有するディスプレイを含む、請求項12に記載のロボット外科手術システム。
- 前記GUIは、前記機器コントローラアセンブリの向きおよび位置を1つまたは複数の角度から示すように構成される、請求項13に記載のロボット外科手術システム。
- ロボット医療処置を実行するための方法であって、
患者コンソールのベースの上部に取り付けられ、垂直軸で上下運動をもたらす垂直リフトを使用することと、
前記垂直リフトの上部に取り付けられ、前記垂直軸を中心としたヨーの回転をもたらすヨー回転装置を使用することと、
前記ヨー回転装置の上部に取り付けられ、前記垂直軸に直交するピッチ軸を中心としたピッチの回転をもたらすように構成されたピッチ回転装置を使用することと、
前記ピッチ回転装置の上部に取り付けられ、並進軸に沿って摺動並進をもたらすように構成された並進装置を使用することと、
機器コントローラアセンブリにロールをもたらすために、ロール軸を中心に前記並進装置に対してロールするように前記並進装置に取り付けられたロール回転装置であって、水平に対する前記並進軸および前記ロール軸の角度は、前記ピッチ回転装置によってもたらされる前記ピッチの回転の関数であり、前記並進軸および前記ロール軸の方向は、前記ヨー回転装置によってもたらされる前記ヨーの回転の関数である、ロール回転装置を使用することと
を含む、方法。 - 外科手術を実行するために医療装置を制御するために前記ロール回転装置に接続された1つまたは複数の機器コントローラを有する機器コントローラアセンブリを使用すること、および前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置を使用して前記機器コントローラアセンブリに5つの自由度を設けることをさらに含む、請求項15に記載の方法。
- 追加の動きの自由度をもたらすために床に対して前記患者コンソールの前記ベースを移動することをさらに含む、請求項16に記載の方法。
- 経肛門処置、経口処置、または経膣処置のための医療装置を位置決めすることをさらに含む、請求項17に記載の方法。
- 前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置のそれぞれをユーザ入力装置で制御することをさらに含む、請求項8に記載の方法。
- グラフィカルユーザインターフェース(GUI)を使用して、前記垂直リフト、前記ヨー回転装置、前記ピッチ回転装置、前記並進装置、および前記ロール回転装置のそれぞれを制御することをさらに含む、請求項12に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202163284499P | 2021-11-30 | 2021-11-30 | |
| US63/284,499 | 2021-11-30 | ||
| PCT/US2022/051220 WO2023101949A1 (en) | 2021-11-30 | 2022-11-29 | Patient console 5-degree of freedom positioning systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024543764A true JP2024543764A (ja) | 2024-11-26 |
| JP2024543764A5 JP2024543764A5 (ja) | 2025-12-08 |
Family
ID=86612977
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024513677A Pending JP2024543764A (ja) | 2021-11-30 | 2022-11-29 | 患者コンソールの5つの自由度での位置決めシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12138001B2 (ja) |
| EP (1) | EP4440477A4 (ja) |
| JP (1) | JP2024543764A (ja) |
| KR (1) | KR20240134851A (ja) |
| TW (1) | TWI838986B (ja) |
| WO (1) | WO2023101949A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023101971A1 (en) | 2021-11-30 | 2023-06-08 | Endoquest Robotics, Inc. | Barrier drape adapters for robotic surgical systems |
| KR20260041932A (ko) | 2021-11-30 | 2026-03-27 | 엔도퀘스트 로보틱스 인코포레이티드 | 일회용 엔드 이펙터 |
| KR20240152819A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 수술 시스템용 컨트롤러 장치 |
| KR20240152820A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 제어 의료 기기용 힘 전달 시스템 |
| TWI835436B (zh) | 2021-11-30 | 2024-03-11 | 美商安督奎斯特機器人公司 | 用於機器人手術系統的可轉向套管組件、其控制組件及其方法 |
| WO2026015700A1 (en) * | 2024-07-11 | 2026-01-15 | Covidien Lp | Surgical robotic system for controlling laparoscopic and endoluminal instruments |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007290096A (ja) * | 2006-04-27 | 2007-11-08 | Keio Gijuku | マニピュレータ装置 |
| JP2015512666A (ja) * | 2012-02-15 | 2015-04-30 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 標的介入のためのコンパクト針マニピュレータ |
| CN105310775A (zh) * | 2014-07-31 | 2016-02-10 | 乐普(北京)医疗器械股份有限公司 | 机械臂 |
| WO2017064303A1 (en) * | 2015-10-16 | 2017-04-20 | Medical Microinstruments S.R.L. | Surgical tool for robotic surgery and robotic surgical assembly |
| US20190328472A1 (en) * | 2018-04-27 | 2019-10-31 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical system and method for controlling the same |
| US20200146763A1 (en) * | 2012-06-01 | 2020-05-14 | Intuitive Surgical Operations, Inc. | Redundant Axis and Degree of Freedom for Hardware-Constrained Remote Center Robotic Manipulator |
| WO2020214193A1 (en) * | 2019-04-15 | 2020-10-22 | Covidien Lp | System and method for aligning a surgical robotic arm |
| WO2021071540A1 (en) * | 2019-10-11 | 2021-04-15 | Colubrismx, Inc. | Seven degree of freedom positioning device for robotic surgery |
| JP2021513442A (ja) * | 2018-02-07 | 2021-05-27 | ディスタルモーション エスエー | ロボット遠隔マニピュレータを備えた手術ロボットシステム及び統合腹腔鏡手術 |
| WO2021161162A1 (en) * | 2020-02-10 | 2021-08-19 | Medical Microinstruments S.p.A. | Robotic microsurgery assembly, operating arena and method |
Family Cites Families (200)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| US7074179B2 (en) | 1992-08-10 | 2006-07-11 | Intuitive Surgical Inc | Method and apparatus for performing minimally invasive cardiac procedures |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6699177B1 (en) | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5797900A (en) | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6786896B1 (en) | 1997-09-19 | 2004-09-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US9050119B2 (en) | 2005-12-20 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Cable tensioning in a robotic surgical system |
| US6714839B2 (en) | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| US6246200B1 (en) | 1998-08-04 | 2001-06-12 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| US6852107B2 (en) | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US6951535B2 (en) | 2002-01-16 | 2005-10-04 | Intuitive Surgical, Inc. | Tele-medicine system that transmits an entire state of a subsystem |
| US6493608B1 (en) | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| US6522906B1 (en) | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| US6451027B1 (en) | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6565554B1 (en) | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US6817972B2 (en) | 1999-10-01 | 2004-11-16 | Computer Motion, Inc. | Heart stabilizer |
| US6312435B1 (en) | 1999-10-08 | 2001-11-06 | Intuitive Surgical, Inc. | Surgical instrument with extended reach for use in minimally invasive surgery |
| US6491691B1 (en) | 1999-10-08 | 2002-12-10 | Intuitive Surgical, Inc. | Minimally invasive surgical hook apparatus and method for using same |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6645196B1 (en) | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| ATE547992T1 (de) | 2001-06-29 | 2012-03-15 | Intuitive Surgical Operations | Gelenkmechanismus fuer plattformverbindung |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| US6676684B1 (en) | 2001-09-04 | 2004-01-13 | Intuitive Surgical, Inc. | Roll-pitch-roll-yaw surgical tool |
| US6728599B2 (en) | 2001-09-07 | 2004-04-27 | Computer Motion, Inc. | Modularity system for computer assisted surgery |
| US6587750B2 (en) | 2001-09-25 | 2003-07-01 | Intuitive Surgical, Inc. | Removable infinite roll master grip handle and touch sensor for robotic surgery |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| EP3498213A3 (en) | 2002-12-06 | 2019-07-03 | Intuitive Surgical Operations, Inc. | Flexible wrist for surgical tool |
| US7578786B2 (en) | 2003-04-01 | 2009-08-25 | Boston Scientific Scimed, Inc. | Video endoscope |
| EP2589406B1 (en) | 2003-05-21 | 2018-10-10 | The Johns Hopkins University | Devices and systems for minimally invasive surgery of the throat and other portions of mammalian body |
| US7090637B2 (en) | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US8052636B2 (en) | 2004-03-05 | 2011-11-08 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US7678117B2 (en) | 2004-06-07 | 2010-03-16 | Novare Surgical Systems, Inc. | Articulating mechanism with flex-hinged links |
| JP4980899B2 (ja) | 2004-06-25 | 2012-07-18 | カーネギー メロン ユニバーシティ | 操向可能なフォローザリーダー装置 |
| US7837674B2 (en) | 2005-01-24 | 2010-11-23 | Intuitive Surgical Operations, Inc. | Compact counter balance for robotic surgical systems |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US8375808B2 (en) | 2005-12-30 | 2013-02-19 | Intuitive Surgical Operations, Inc. | Force sensing for surgical instruments |
| US8945095B2 (en) | 2005-03-30 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Force and torque sensing for surgical instruments |
| US8147503B2 (en) | 2007-09-30 | 2012-04-03 | Intuitive Surgical Operations Inc. | Methods of locating and tracking robotic instruments in robotic surgical systems |
| US8398541B2 (en) | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| EP3395508A1 (en) | 2005-06-30 | 2018-10-31 | Intuitive Surgical Operations Inc. | Indicator for tool state communication in multi-arm robotic telesurgery |
| WO2007005976A1 (en) | 2005-07-01 | 2007-01-11 | Hansen Medical, Inc. | Robotic catheter system |
| US8190238B2 (en) | 2005-12-09 | 2012-05-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US7757028B2 (en) | 2005-12-22 | 2010-07-13 | Intuitive Surgical Operations, Inc. | Multi-priority messaging |
| US7756036B2 (en) | 2005-12-22 | 2010-07-13 | Intuitive Surgical Operations, Inc. | Synchronous data communication |
| US8054752B2 (en) | 2005-12-22 | 2011-11-08 | Intuitive Surgical Operations, Inc. | Synchronous data communication |
| US9962066B2 (en) | 2005-12-30 | 2018-05-08 | Intuitive Surgical Operations, Inc. | Methods and apparatus to shape flexible entry guides for minimally invasive surgery |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| WO2007096951A1 (ja) | 2006-02-21 | 2007-08-30 | Olympus Medical Systems Corp. | 内視鏡システム、及び医療器具 |
| US20080064927A1 (en) | 2006-06-13 | 2008-03-13 | Intuitive Surgical, Inc. | Minimally invasrive surgery guide tube |
| US8597280B2 (en) | 2006-06-13 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Surgical instrument actuator |
| US8657805B2 (en) | 2007-05-08 | 2014-02-25 | Intuitive Surgical Operations, Inc. | Complex shape steerable tissue visualization and manipulation catheter |
| US9096033B2 (en) | 2007-06-13 | 2015-08-04 | Intuitive Surgical Operations, Inc. | Surgical system instrument sterile adapter |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US8224484B2 (en) | 2007-09-30 | 2012-07-17 | Intuitive Surgical Operations, Inc. | Methods of user interface with alternate tool mode for robotic surgical tools |
| US9521961B2 (en) | 2007-11-26 | 2016-12-20 | C. R. Bard, Inc. | Systems and methods for guiding a medical instrument |
| US8228368B2 (en) | 2008-04-26 | 2012-07-24 | Intuitive Surgical Operations, Inc. | Augmented stereoscopic visualization for a surgical robot using a captured fluorescence image and captured stereoscopic visible images |
| US8280485B2 (en) * | 2008-06-18 | 2012-10-02 | Engineering Services Inc. | Medical robot for use in a MRI |
| US8821480B2 (en) | 2008-07-16 | 2014-09-02 | Intuitive Surgical Operations, Inc. | Four-cable wrist with solid surface cable channels |
| US9186221B2 (en) | 2008-07-16 | 2015-11-17 | Intuitive Surgical Operations Inc. | Backend mechanism for four-cable wrist |
| WO2010025336A1 (en) | 2008-08-29 | 2010-03-04 | Corindus Ltd. | Catheter simulation and assistance system |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US8335590B2 (en) | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| US8594841B2 (en) | 2008-12-31 | 2013-11-26 | Intuitive Surgical Operations, Inc. | Visual force feedback in a minimally invasive surgical procedure |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8918207B2 (en) | 2009-03-09 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Operator input device for a robotic surgical system |
| US8423186B2 (en) | 2009-06-30 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Ratcheting for master alignment of a teleoperated minimally-invasive surgical instrument |
| HU229773B1 (hu) | 2009-09-02 | 2014-06-30 | Eszköz sebészeti beavatkozáshoz | |
| US8465476B2 (en) | 2009-09-23 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cannula mounting fixture |
| KR101037069B1 (ko) | 2009-09-23 | 2011-05-26 | 주식회사 이턴 | 멸균 어댑터 |
| US8996173B2 (en) | 2010-09-21 | 2015-03-31 | Intuitive Surgical Operations, Inc. | Method and apparatus for hand gesture control in a minimally invasive surgical system |
| US8521331B2 (en) | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| US20110118708A1 (en) | 2009-11-13 | 2011-05-19 | Intuitive Surgical Operations, Inc. | Double universal joint |
| CN102596087B (zh) | 2009-11-13 | 2015-07-22 | 直观外科手术操作公司 | 用于独立转动构件中的平行驱动轴的电动机接口 |
| US8887595B2 (en) | 2009-12-22 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Instrument wrist with cycloidal surfaces |
| US9339341B2 (en) | 2010-02-08 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Direct pull surgical gripper |
| US8343045B2 (en) | 2010-04-05 | 2013-01-01 | Intuitive Surgical Operations, Inc. | Curved cannula |
| US8603077B2 (en) | 2010-05-14 | 2013-12-10 | Intuitive Surgical Operations, Inc. | Force transmission for robotic surgical instrument |
| US8644988B2 (en) | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| US9456839B2 (en) | 2010-06-18 | 2016-10-04 | Intuitive Surgical Operations, Inc. | Scissor bias for direct pull surgical instrument |
| US8295693B2 (en) | 2010-07-02 | 2012-10-23 | Intuitive Surgical Operations, Inc. | Dual optical path prism and camera in a minimally invasive surgical system |
| EP2590586B1 (en) | 2010-07-09 | 2014-08-06 | Intuitive Surgical Operations, Inc. | Electrosurgical tool cover |
| US9615886B2 (en) | 2010-09-15 | 2017-04-11 | Koninklijke Philips N.V. | Robotic control of an endoscope from blood vessel tree images |
| US20120191107A1 (en) | 2010-09-17 | 2012-07-26 | Tanner Neal A | Systems and methods for positioning an elongate member inside a body |
| US9254090B2 (en) | 2010-10-22 | 2016-02-09 | Intuitive Surgical Operations, Inc. | Tissue contrast imaging systems |
| US9066741B2 (en) | 2010-11-01 | 2015-06-30 | Atricure, Inc. | Robotic toolkit |
| CN105748152B (zh) | 2010-11-15 | 2018-06-26 | 直观外科手术操作公司 | 在手术仪器中去耦仪器轴滚动和末端执行器促动 |
| US8784301B2 (en) | 2011-08-12 | 2014-07-22 | Intuitive Surgical Operations, Inc. | Image capture unit and method with an extended depth of field |
| US9144456B2 (en) | 2012-04-09 | 2015-09-29 | Intuitive Surgical Operations, Inc. | Surgical instrument control |
| DE102012207707A1 (de) | 2012-05-09 | 2013-11-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Minimalinvasives Instrument für die robotische Chirurgie |
| US10039473B2 (en) | 2012-05-14 | 2018-08-07 | Intuitive Surgical Operations, Inc. | Systems and methods for navigation based on ordered sensor records |
| KR102366082B1 (ko) | 2012-06-01 | 2022-02-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 멀티포트 수술 로봇 시스템 구조 |
| CN104334110B (zh) | 2012-06-01 | 2017-10-03 | 直观外科手术操作公司 | 使用零空间回避操纵器臂与患者碰撞 |
| CN104622581B (zh) | 2012-07-03 | 2018-02-02 | 库卡实验仪器有限公司 | 手术器械组、特别是机器人引导的手术器械的传动器组和手术器械 |
| US10178368B2 (en) | 2012-10-23 | 2019-01-08 | Intuitive Surgical Operations, Inc. | Stereo imaging system with automatic disparity adjustment for displaying close range objects |
| EP3791822A1 (en) | 2012-11-02 | 2021-03-17 | Intuitive Surgical Operations, Inc. | Self-antagonistic drive for medical instruments |
| KR20140090374A (ko) * | 2013-01-08 | 2014-07-17 | 삼성전자주식회사 | 싱글 포트 수술 로봇 및 그 제어 방법 |
| KR20140112601A (ko) | 2013-03-11 | 2014-09-24 | 삼성전자주식회사 | 내시경 수술기구 |
| US9545288B2 (en) | 2013-03-14 | 2017-01-17 | Think Surgical, Inc. | Systems and devices for a counter balanced surgical robot |
| JP6396987B2 (ja) * | 2013-03-15 | 2018-09-26 | エスアールアイ インターナショナルSRI International | 超精巧外科システム |
| CN105050531B (zh) | 2013-03-15 | 2018-02-13 | 直观外科手术操作公司 | 具有操控界面的外科患者侧手推车 |
| US9918659B2 (en) | 2013-03-15 | 2018-03-20 | Intuitive Surgical Operations, Inc. | Shape sensor systems for tracking interventional instruments and mehods of use |
| KR102256358B1 (ko) | 2013-03-18 | 2021-05-27 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 기구 구동 요소 및 관련 장치, 시스템 및 방법 |
| KR102115447B1 (ko) | 2013-03-27 | 2020-05-27 | 한양대학교 에리카산학협력단 | 내시경 장치 |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| US9817019B2 (en) | 2013-11-13 | 2017-11-14 | Intuitive Surgical Operations, Inc. | Integrated fiber bragg grating accelerometer in a surgical instrument |
| EP3834752B1 (en) | 2013-12-11 | 2024-03-13 | Covidien LP | Wrist and jaw assemblies for robotic surgical systems |
| EP3119316B1 (en) | 2014-03-17 | 2020-05-27 | Intuitive Surgical Operations, Inc. | Sterile drape with sterile adapter comprising mounting datum for surgical instrument |
| WO2015142786A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Constant force spring with active bias |
| JP6644699B2 (ja) | 2014-03-19 | 2020-02-12 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 視線追跡を使用する医療装置、システム、及び方法 |
| EP3125785B1 (en) | 2014-03-31 | 2020-03-04 | Covidien LP | Wrist and jaw assemblies for robotic surgical systems |
| US9724168B2 (en) | 2014-04-22 | 2017-08-08 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| EP3180167A1 (de) | 2014-08-14 | 2017-06-21 | KUKA Roboter GmbH | Trägersystem für einen manipulator |
| WO2016043845A1 (en) | 2014-09-15 | 2016-03-24 | Covidien Lp | Robotically controlling surgical assemblies |
| WO2016109886A1 (en) | 2015-01-09 | 2016-07-14 | Titan Medical Inc. | Autonomous correction of alignment error in a master-slave robotic system |
| CA2973235C (en) | 2015-01-09 | 2017-12-12 | Titan Medical Inc. | Alignment difference safety in a master-slave robotic system |
| JP6165365B2 (ja) | 2015-01-16 | 2017-07-19 | オリンパス株式会社 | 操作入力装置および医療用マニピュレータシステム |
| AU2016229897B2 (en) | 2015-03-10 | 2020-07-16 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| CA2984092C (en) | 2015-05-01 | 2023-01-03 | Titan Medical Inc. | Instrument collision detection and feedback |
| CA2987637C (en) | 2015-06-16 | 2023-10-03 | Covidien Lp | Robotic surgical system torque transduction sensing |
| US9862099B1 (en) | 2015-06-22 | 2018-01-09 | X Development Llc | Haptic controller with touch-sensitive control knob |
| WO2017006377A1 (ja) | 2015-07-09 | 2017-01-12 | 川崎重工業株式会社 | 手術用ロボット |
| CA2992948C (en) | 2015-07-17 | 2026-02-17 | Deka Products Limited Partnership | Robotic surgery system, method, and apparatus |
| WO2017015235A1 (en) | 2015-07-17 | 2017-01-26 | The Johns Hopkins University | Delta mechanism with enhanced torsional stiffness |
| US10828115B2 (en) | 2015-07-23 | 2020-11-10 | Sri International | Robotic arm and robotic surgical system |
| US10603119B2 (en) * | 2015-09-04 | 2020-03-31 | Mako Surgical Corp. | Steering mechanism for portable surgical robot |
| CN113274140B (zh) | 2015-09-09 | 2022-09-02 | 奥瑞斯健康公司 | 手术覆盖件 |
| CN108348296B (zh) | 2015-11-12 | 2021-06-11 | 柯惠Lp公司 | 机器人外科手术系统和监测施加的力的方法 |
| EP3373831B1 (en) | 2015-11-13 | 2024-01-03 | Intuitive Surgical Operations, Inc. | Push-pull stapler with two degree of freedom wrist |
| KR102742976B1 (ko) | 2016-02-05 | 2024-12-16 | 보드 오브 리전츠, 더 유니버시티 오브 텍사스 시스템 | 외과용 장치 |
| US10905505B1 (en) | 2016-04-22 | 2021-02-02 | Memorial Sloan Kettering Cancer Center | Robotic surgical manipulation systems and methods |
| US11037464B2 (en) * | 2016-07-21 | 2021-06-15 | Auris Health, Inc. | System with emulator movement tracking for controlling medical devices |
| US10390895B2 (en) | 2016-08-16 | 2019-08-27 | Ethicon Llc | Control of advancement rate and application force based on measured forces |
| US10736702B2 (en) | 2016-08-16 | 2020-08-11 | Ethicon Llc | Activating and rotating surgical end effectors |
| US9943377B2 (en) | 2016-08-16 | 2018-04-17 | Ethicon Endo-Surgery, Llc | Methods, systems, and devices for causing end effector motion with a robotic surgical system |
| US10531929B2 (en) | 2016-08-16 | 2020-01-14 | Ethicon Llc | Control of robotic arm motion based on sensed load on cutting tool |
| CA3039100A1 (en) | 2016-10-04 | 2018-04-12 | Imperial Innovations Limited | Coupling for a robotic surgical instrument |
| CN111417354B (zh) * | 2016-10-25 | 2023-12-12 | 莫比乌斯成像公司 | 用于机器人辅助手术的方法及系统 |
| CN110177500B (zh) | 2016-11-16 | 2022-03-04 | 纳维斯国际有限公司 | 组织模型动态视觉渲染 |
| CN113349932A (zh) | 2016-12-20 | 2021-09-07 | 威博外科公司 | 用于机器人外科系统的无菌适配器控制系统和通信接口 |
| KR101943440B1 (ko) | 2017-03-20 | 2019-01-30 | 한국과학기술연구원 | 원격 진료용 가이드 장치 |
| US20180286287A1 (en) | 2017-03-28 | 2018-10-04 | Covidien Lp | System and methods for training physicians to perform ablation procedures |
| US20200205917A1 (en) | 2017-05-24 | 2020-07-02 | Covidien Lp | Pedal control for robotic surgical systems |
| MX2019008050A (es) | 2017-06-29 | 2019-10-21 | Colubrismx Inc | Aparato quirurgico. |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| EP3681368A4 (en) | 2017-09-14 | 2021-06-23 | Vicarious Surgical Inc. | SURGICAL CAMERA SYSTEM WITH VIRTUAL REALITY |
| US10828117B2 (en) | 2017-10-26 | 2020-11-10 | Ethicon Llc | Constant force spring assemblies for robotic surgical tools |
| KR102414011B1 (ko) | 2017-12-29 | 2022-06-27 | 더 보드 오브 리젠츠 오브 더 유니버시티 오브 텍사스 시스템 | 수술 기구 및 피복의 단부상에서의 캡에 대한 엔드 이펙터의 위치결정 방법 |
| US12193774B2 (en) | 2018-01-09 | 2025-01-14 | Covidien Lp | Sterile interface module for robotic surgical assemblies |
| CN108309370B (zh) | 2018-02-02 | 2019-10-29 | 上海交通大学 | 一种渐进式的心脑血管介入手术机器人 |
| US10835335B2 (en) | 2018-03-12 | 2020-11-17 | Ethicon Llc | Cable failure detection |
| EP3768187A4 (en) * | 2018-03-21 | 2021-12-22 | The Regents Of The University Of California | FAST AND PRECISE TOOL CHANGE MECHANISM FOR INTRAOCULAR ROBOTIC SURGICAL SYSTEMS |
| US11524181B2 (en) | 2018-04-17 | 2022-12-13 | Best Theratronics Ltd. | Intraoperative radiation therapy system |
| JP7039070B2 (ja) * | 2018-05-02 | 2022-03-22 | リバーフィールド株式会社 | 眼内手術用器具ホルダ |
| US12150713B2 (en) * | 2018-05-16 | 2024-11-26 | University Of Maryland, College Park | Confidence-based robotically-assisted surgery system |
| US11135030B2 (en) | 2018-06-15 | 2021-10-05 | Verb Surgical Inc. | User interface device having finger clutch |
| US20200214774A1 (en) | 2018-12-26 | 2020-07-09 | Kawasaki Jukogyo Kabushiki Kaisha | Electric handcart and surgical assist robot |
| CN109674647A (zh) | 2019-03-07 | 2019-04-26 | 西安伊蔓蒂电子科技有限公司 | 一种按摩机器人 |
| US12478444B2 (en) | 2019-03-21 | 2025-11-25 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for localization based on machine learning |
| US10939970B2 (en) | 2019-05-22 | 2021-03-09 | Titan Medical Inc. | Robotic surgery system |
| EP3976155A4 (en) | 2019-05-31 | 2023-09-27 | Canon U.S.A. Inc. | Actively controlled steerable medical device with passive bending mode |
| US20210338052A1 (en) | 2019-06-20 | 2021-11-04 | Uroviu Corp. | Portable endoscope with steerable cannula |
| CN114449939A (zh) | 2019-08-05 | 2022-05-06 | 适内有限责任公司 | 内窥镜组件和系统 |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| CN210990702U (zh) * | 2019-09-12 | 2020-07-14 | 上海交通大学医学院附属第九人民医院 | 基于高刚度平行四边形远心机构的多自由度手术机器人 |
| IT202000002536A1 (it) | 2020-02-10 | 2021-08-10 | Medical Microinstruments Spa | Adattatore sterile per un sistema di chirurgia robotica, assieme, sistema e metodo |
| US20210259794A1 (en) | 2020-02-21 | 2021-08-26 | Canon Usa, Inc. | Medical Apparatus Having Dual Manipulation Means and Methods of Use Thereof |
| CN213606867U (zh) | 2020-09-11 | 2021-07-06 | 苏州威森特医疗机器人有限公司 | 全主动串联医疗操作手 |
| EP4440482A4 (en) | 2021-11-30 | 2025-12-31 | Endoquest Robotics Inc | POSITION CONTROL FOR PATIENT CONSOLE |
| KR20240152819A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 수술 시스템용 컨트롤러 장치 |
| TWI835436B (zh) | 2021-11-30 | 2024-03-11 | 美商安督奎斯特機器人公司 | 用於機器人手術系統的可轉向套管組件、其控制組件及其方法 |
| KR20240152820A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 제어 의료 기기용 힘 전달 시스템 |
| WO2023101971A1 (en) | 2021-11-30 | 2023-06-08 | Endoquest Robotics, Inc. | Barrier drape adapters for robotic surgical systems |
| JP2024544456A (ja) | 2021-11-30 | 2024-12-03 | エンドクエスト ロボティクス インコーポレイテッド | ロボット外科手術システム用の安全ハンドセンサシステム |
| TWI876759B (zh) | 2021-11-30 | 2025-03-11 | 美商安督奎斯特機器人公司 | 機器人手術系統及其控制模組 |
| JP2024543775A (ja) | 2021-11-30 | 2024-11-26 | エンドクエスト ロボティクス インコーポレイテッド | ワイヤ伸び補償システム |
| TWI895656B (zh) | 2021-11-30 | 2025-09-01 | 美商安督奎斯特機器人公司 | 機器人手術系統的顯示系統 |
| KR20260041932A (ko) | 2021-11-30 | 2026-03-27 | 엔도퀘스트 로보틱스 인코포레이티드 | 일회용 엔드 이펙터 |
| KR20240155232A (ko) | 2022-02-01 | 2024-10-28 | 엔도퀘스트 로보틱스 인코포레이티드 | 의료 기기의 경관 도입을 위한 시스템 및 방법 |
-
2022
- 2022-11-29 JP JP2024513677A patent/JP2024543764A/ja active Pending
- 2022-11-29 EP EP22902069.8A patent/EP4440477A4/en active Pending
- 2022-11-29 TW TW111145621A patent/TWI838986B/zh active
- 2022-11-29 WO PCT/US2022/051220 patent/WO2023101949A1/en not_active Ceased
- 2022-11-29 KR KR1020247007086A patent/KR20240134851A/ko active Pending
-
2023
- 2023-03-15 US US18/122,007 patent/US12138001B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007290096A (ja) * | 2006-04-27 | 2007-11-08 | Keio Gijuku | マニピュレータ装置 |
| JP2015512666A (ja) * | 2012-02-15 | 2015-04-30 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 標的介入のためのコンパクト針マニピュレータ |
| US20200146763A1 (en) * | 2012-06-01 | 2020-05-14 | Intuitive Surgical Operations, Inc. | Redundant Axis and Degree of Freedom for Hardware-Constrained Remote Center Robotic Manipulator |
| CN105310775A (zh) * | 2014-07-31 | 2016-02-10 | 乐普(北京)医疗器械股份有限公司 | 机械臂 |
| WO2017064303A1 (en) * | 2015-10-16 | 2017-04-20 | Medical Microinstruments S.R.L. | Surgical tool for robotic surgery and robotic surgical assembly |
| JP2021513442A (ja) * | 2018-02-07 | 2021-05-27 | ディスタルモーション エスエー | ロボット遠隔マニピュレータを備えた手術ロボットシステム及び統合腹腔鏡手術 |
| US20190328472A1 (en) * | 2018-04-27 | 2019-10-31 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical system and method for controlling the same |
| WO2020214193A1 (en) * | 2019-04-15 | 2020-10-22 | Covidien Lp | System and method for aligning a surgical robotic arm |
| WO2021071540A1 (en) * | 2019-10-11 | 2021-04-15 | Colubrismx, Inc. | Seven degree of freedom positioning device for robotic surgery |
| WO2021161162A1 (en) * | 2020-02-10 | 2021-08-19 | Medical Microinstruments S.p.A. | Robotic microsurgery assembly, operating arena and method |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI838986B (zh) | 2024-04-11 |
| KR20240134851A (ko) | 2024-09-10 |
| US12138001B2 (en) | 2024-11-12 |
| WO2023101949A8 (en) | 2023-07-20 |
| TW202335643A (zh) | 2023-09-16 |
| EP4440477A1 (en) | 2024-10-09 |
| WO2023101949A1 (en) | 2023-06-08 |
| EP4440477A4 (en) | 2025-12-31 |
| US20230285098A1 (en) | 2023-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2024543764A (ja) | 患者コンソールの5つの自由度での位置決めシステム | |
| JP2024544457A (ja) | 患者コンソールに対する位置決めの制御 | |
| JP7275204B2 (ja) | 遠隔操作医療システムにおけるオンスクリーンメニューのためのシステム及び方法 | |
| US12144575B2 (en) | Surgeon disengagement detection during termination of teleoperation | |
| US8892224B2 (en) | Method for graphically providing continuous change of state directions to a user of a medical robotic system | |
| KR102145801B1 (ko) | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 | |
| CN114401691A (zh) | 用于外科机器人的手持式用户界面设备 | |
| CN116056655B (zh) | 用于通过外科机器人控制内窥镜的系统和方法 | |
| WO2023101948A1 (en) | Master control systems for robotic surgical systems | |
| EP3968890A1 (en) | Interlock mechanisms to disengage and engage a teleoperation mode | |
| WO2020247865A1 (en) | Estimating joint friction and tracking error of a robotics end effector | |
| EP4192381A1 (en) | Auxiliary apparatus for surgical operations | |
| Mirbagheri et al. | Operation and human clinical trials of robolens: an assistant robot for laparoscopic surgery | |
| JP2006055273A (ja) | 手術支援システム | |
| WO2026030203A1 (en) | Facilitating operation of a manipulator through reconfiguration of a proximal segment of the manipulator | |
| US20250041011A1 (en) | User interfaces for surgical robotic systems | |
| JP2025522838A (ja) | ロボットクリップアプライヤのための安全モード及び発射モード | |
| Mabilde | A novel hybrid 3D endoscope zooming and repositioning system: Design and feasibility study |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20251128 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20251128 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20251128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20260224 |