JP3565894B2 - 磁気軸受装置 - Google Patents
磁気軸受装置 Download PDFInfo
- Publication number
- JP3565894B2 JP3565894B2 JP05409594A JP5409594A JP3565894B2 JP 3565894 B2 JP3565894 B2 JP 3565894B2 JP 05409594 A JP05409594 A JP 05409594A JP 5409594 A JP5409594 A JP 5409594A JP 3565894 B2 JP3565894 B2 JP 3565894B2
- Authority
- JP
- Japan
- Prior art keywords
- electromagnet
- rotating body
- gap
- magnetic bearing
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000006073 displacement reaction Methods 0.000 claims description 18
- 230000008030 elimination Effects 0.000 claims description 18
- 238000003379 elimination reaction Methods 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 12
- 230000014509 gene expression Effects 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 5
- 238000000605 extraction Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 2
- 208000031872 Body Remains Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000005339 levitation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
- F16C2360/44—Centrifugal pumps
- F16C2360/45—Turbo-molecular pumps
Landscapes
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Description
【産業上の利用分野】
本発明は、磁気軸受装置に係り、例えば、回転体の不釣合により発生する振動を抑制する磁気軸受装置に関する。
【0002】
【従来の技術】
回転体を磁気軸受で支持するシステムにおいては、「回転体の回転軸」と「重心」とのずれに基づく不釣り合いが、回転体に生じる場合がある。このような場合に磁気軸受は、前記不釣り合いに起因する「回転体の振れ回り」を抑えつけようとするため、回転周波数に同期した周期的な制御力を発生する。この周期的な制御力により磁気軸受電磁石が配置されたステータ側に、回転周波数成分の振動が発生する。
【0003】
一方、磁気軸受は、例えばターボ分子ポンプに使用される場合がある。ターボ分子ポンプは、振動を極度に嫌う電子顕微鏡や半導体製造装置等に使用されるため、前述の不釣り合いによって生じるステータ側の振動は、好ましくない。
従来、前述のような振動を防ぐ手段として「磁気懸垂方式ロータに於ける同期妨害補償装置」(特公昭60−14929号公報)が知られている。
【0004】
この特公昭では、センサで検出した回転体と電磁石とのギャップに基づくギャップ変位信号の内、回転体の回転周波数成分の信号をフィルタで除去することにより、電磁石が前記回転周波数に同期した周期的な制御力を発生しないようにしている。
【0005】
その結果、回転体は慣性中心(重心中心)で回転を行う。このようにすれば、回転体の振れ回りは残るが、回転周波数に同期した周期的な制御力によって発生するステータ側の振動を減少させることができる。
【0006】
【発明が解決しようとする課題】
しかしながら、前記特公昭によっては、ステータ側の振動を大幅に減少させることができず、前述の振動を極度に嫌う用途で磁気軸受を使用する場合には、その残留分の振動が問題点となっていた。
【0007】
ここで、前記特公昭では、ステータ側の振動を大幅に減少させることができない理由を、数式を用いて詳細に説明する。
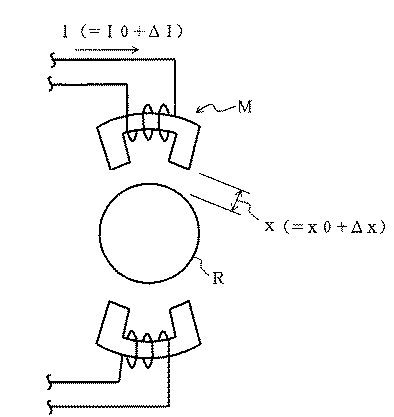
図6に示すように、一般に、磁気軸受に使用される電磁石Mが発生する吸引力Fは、(1)式で表される。
【0008】
F=K(I/x)2 …(1)
ここに、Kは電磁石の形状や巻数で決まる係数、Iは電磁石電流、xは電磁石部のギャップである。
通常、磁気軸受では電磁石Mの吸引力を線形化するために、直流バイアス電流I0を重畳しており、また、回転体Rの位置制御信号による電磁石電流Iの変動分をΔIとすると、電磁石電流Iは(2)式で表される。
【0009】
I=I0+ΔI …(2)
一方、電磁石部のギャップの定常値をx0、ギャップの変動分をΔxとすると、電磁石部のギャップxは(3)式で表される。
x=x0+Δx …(3)
従って、(2)、(3)式を(1)式に代入すると、(4)式となる。
【0010】
F=K{(I0+ΔI)/(x0+Δx)}2 …(4)
この(4)式から明らかなように、「回転浮上時」における吸引力Fには、ギャップの変動分Δxと電磁石電流の変動分ΔIとが含まれ、「回転浮上時」における電磁石が発生する吸引力Fは変動することが分かる。
【0011】
また、直流バイアス電流I0および電磁石部の定常値のギャップx0は、予め設定可能な値である。前記電流I0およびギャップx0の条件が与えられた場合に、回転体Rの「静止浮上時」における電磁石Mが発生する力F0は、(5)式で表される。
【0012】
F0=K(I0/x0)2 …(5)
この(5)式から明らかなように、「静止浮上時」における吸引力F0には、前述の変動分Δx、ΔIが含まれておらず、吸引力F0は変動しないことが分かる。
【0013】
一方、回転体Rの回転中におけるギャップの変動分Δxは、主に回転体Rの振れ回りによって生じる。ギャップの変動分Δxは、ギャップ変位センサで検出され、磁気軸受制御回路にフィードバックされる。フィードバックされたギャップの変動分Δxは、PID(比例積分微分)補償器などを通して電流指令値が得られ、この電流指令値によって電磁石電流の変動分ΔIが決定される。
【0014】
そして、通常、ギャップの変動分Δxを「0」に近づけるように電磁石電流の変動分ΔIが変化するようにしている。
しかしながら、前記特公昭では、図6に示すように、振れ回り信号(ギャップの変動分)Δxのパワースペクトラム中で回転体の回転周波数の成分に注目し、回転周波数に同期したトラッキング式帯域除去フィルタ51を用いて電流指令値の回転周波数成分を除去し、更にPID補償器52を介して電流指令値〔Δi〕を生成している。
【0015】
従って、回転周波数成分のみを考えると、(4)式は(6)式で表される。
F=K{I0/(x0+Δx)}2 …(6)
この(6)式から明らかなように、回転体Rの位置制御電流による電磁石電流の変動分ΔIに基づく吸引力変動はなくなるが、振れ回り信号(ギャップの変動分)Δxによる吸引力変動は残り、ステータ側の振動を大幅に減少させることができなかった。
【0016】
そのため、例えば、電子顕微鏡にターボ分子ポンプを使う場合など、用途によっては振動減衰用の機械的なダンパーを別に設ける必要があった。
そこで、本発明の目的は、ステータ側の振動を大幅に減少させる磁気軸受装置を提供することである。
【0017】
【課題を解決するための手段】
請求項1記載の発明では、回転体と、この回転体を所定位置で磁気支持する電磁石と、前記回転体と電磁石とのギャップの変位を検出する変位検出手段と、前記変位検出手段で検出された回転体と電磁石とのギャップの変動分信号の内、回転体の回転周波数成分を抽出する周波数抽出手段と、この周波数抽出手段で抽出した回転周波数成分に、前記電磁石に供給する電磁石電流の一部をなす直流バイアス電流を乗算すると共に、前記回転体が所定位置に存在する場合におけるギャップの定常値で除算する第1演算手段と、前記直流バイアス電流に対して、前記第1演算手段の出力結果を加算または減算する第2演算手段とを備えて、前記目的を達成する。
【0018】
請求項2記載の発明では、前記周波数抽出手段を、帯域通過フィルタで構成して、前記目的を達成する。
請求項3記載の発明では、前記周波数抽出手段は、前記ギャップの変動分信号の内、回転体の回転周波数成分を除去する帯域除去フィルタと、前記ギャップの変動分信号から、前記帯域除去フィルタの出力信号を減算する減算器とを備えて、前記目的を達成する。
【0019】
【作用】
請求項1記載の磁気軸受装置では、周波数抽出手段は、変位検出手段で検出した回転体と電磁石とのギャップの変動分信号の内、回転体の周波数成分を抽出する。第1演算手段は、周波数抽出手段で抽出された回転体周波数成分に、電磁石に供給する電流を形成する直流バイアス電流を乗算すると共に、前記回転体が所定位置に存在する場合におけるギャップの定常値で除算を行う。第2演算手段は、前記直流バイアス電流に対して、前記第1演算手段の出力結果を加算または減算する。
【0020】
この加算または減算結果を電磁石に供給すると、電磁石に供給する電流の変動分およびギャップの変動分がキャンセルされ、電磁石の吸引力は、直流バイアス電流とギャップの定常値等の一定値によって決定される。
従って、回転体に振れ回りが発生したとしても、電磁石の吸引力は一定なので、ステータ側には振動が発生しない。
【0021】
請求項2記載の磁気軸受装置では、前記周波数抽出手段を帯域通過フィルタで構成し、周波数抽出を行う。
請求項3記載の磁気軸受装置では、帯域除去フィルタが、ギャップの変動分信号の内、回転体の回転周波数成分を除去する。減算器は、ギャップの変動分信号から、前記帯域除去フィルタの出力信号を減算する。従って、ギャップの変動信号の内、回転体の周波数成分を抽出する場合と等価的な処理がなされる。
【0022】
【実施例】
以下、本発明の磁気軸受装置の実施例を図1ないし図5を参照して詳細に説明する。
図1は、本発明の実施例の磁気軸受装置の1軸分の構成図である。
【0023】
図1に示すように、回転体(ロータ)Rの上下にはギャップxを隔てて一対の第1電磁石(+側電磁石)1aおよび第2電磁石(−側電磁石)1bが配置されている。第1電磁石1aには第1コイル2aが巻回され、第1コイル2aは、第1パワーアンプ3aに接続されている。
【0024】
また、第2電磁石1bには第2コイル2bが巻回され、第2コイル2bは、第2パワーアンプ3bに接続されている。
第1と第2パワーアンプ3a、3bは、電磁石の吸引力変動を「0」に抑える動作を行う磁気軸受制御回路4(4A、4B、4C)に接続されている。なお、磁気軸受制御回路4Aは第1実施例であり、磁気軸受制御回路4Bは第2実施例であり、磁気軸受制御回路4Cは第3実施例である。第1〜第3実施例については、それぞれ図2ないし図5に基づいて、その構成を後述する。
【0025】
また、ロータRの近傍には、ロータRと第1電磁石1aとのギャップxの変位を検出する変位センサ5が配置されている。変位センサ5で検出された変位信号は、変位検出回路6に送られて所定の処理が行われ、振れ回り信号(ギャップの変動分)Δxとして磁気軸受制御回路4に送出される。
【0026】
▲1▼第1実施例
次に、図2および図3(a)、(b)に基づいて、第1実施例の磁気軸受制御回路4Aの構成および動作を説明する。
図2に示すように、変位検出回路6から出力されたギャップの変動分Δxは、帯域通過フィルタ41と帯域除去フィルタ42とに入力される。
【0027】
図3(a)は、帯域通過フィルタ41の周波数特性図であり、図3(b)は帯域除去フィルタ42の周波数特性図である。
図3(b)に示すように、帯域除去フィルタ42は、回転体Rの回転周波数frの信号成分を除去し、また、図3(a)に示すように、帯域通過フィルタ41は、ゲイン0dB(1倍)で回転周波数frの信号成分を通過させる。
【0028】
帯域通過フィルタ41を通過したゲイン0dBの回転周波数frの信号成分は、乗算器43でI0/x0倍され、回転周波数成分のみに着目した変動電流成分〔ΔI2〕が生成される。ここに、I0は、電磁石に流す直流バイアス電流であり、x0は、ギャップの定常値である。この変動電流成分〔ΔI2〕は、(7)式のように表される。
【0029】
〔ΔI2〕≒(I0/x0)Δx …(7)
一方、回転周波数frの信号成分は、帯域除去フィルタ42で除去され、PID補償器44を通過する。PID補償器44の出力である回転周波数成分のみに着目した変動電流成分〔ΔI1〕は、(8)式で表される。
【0030】
〔ΔI1〕≒0 …(8)
従って、〔ΔI1〕と〔ΔI2〕とが加算器45で加算された変動電流指令値〔ΔI〕は、(9)式で表される。
〔ΔI〕=〔ΔI1〕+〔ΔI2〕≒(I0/x0)Δx …(9)
従って、加算器46で直流バイアス電流I0に変動電流指令値〔ΔI〕が加算されて生成される+側電磁石電流指令値〔I+〕と、減算器47で直流バイアス電流I0から変動電流指令値〔ΔI〕が減算されて生成される−側電磁石電流指令値〔I−〕とは、それぞれ(10)、(11)式のようになる。
【0031】
【0032】
ΔI=(I0/x0)Δx …(12)
従って、(12)式を(4)式に代入すると、「+側電磁石の吸引力F+」と「−側電磁石の吸引力F−」とは、それぞれ(13)、(14)式で表される。
【0033】
▲2▼第2実施例
図4は、磁気軸受制御回路4の第2実施例のブロック図である。
図4に示すように、第2実施例の磁気軸受制御回路4Bは、前述の帯域除去フィルタ42(図2参照)を用いる代わりに、帯域通過フィルタ41の出力を乗算器43に供給すると共に、ギャップの変動分Δxから帯域通過フィルタ41の出力を減算し、PID補償器44に入力するようにしたものである。
【0034】
このように構成すると、PID補償器44の入力側には、図3(b)に示した特性の帯域除去フィルタを通過し、回転周波数frが除去された場合とほぼ等価な信号が供給される。
このように構成しても、PID補償器44の出力は〔ΔI1〕となる。
【0035】
従って、第1実施例と同様に、「+側電磁石の吸引力F+」と、「−側電磁石の吸引力F−」とは(15)、(16)式のようになる。
F+=K(I0/x0)2 …(15)
F−=K(I0/x0)2 …(16)
よって、ロータRに振れ回りが発生していても、「+側電磁石の吸引力F+」および「+側電磁石の吸引力F−」がそれぞれ一定となるので、ステータ側には振動が発生しない。
【0036】
▲3▼第3実施例
図5は、磁気軸受制御回路4の第3実施例のブロック図である。
図5に示すように、第3実施例の磁気軸受制御回路4Cは、前述の帯域通過フィルタ41(図2参照)を用いる代わりに、帯域除去フィルタ42の出力をPID補償器44に供給すると共に、減算器48でギャップの変動分Δxから帯域除去フィルタ42の出力を減算し、乗算器43に入力するようにしたものである。
【0037】
このように構成すると、乗算器43の入力側には、図3(a)に示した特性の帯域通過フィルタを通過し、回転周波数frが抽出された場合とほぼ等価な信号が供給される。
このように構成しても、乗算器43の出力は〔ΔI2〕となる。
【0038】
従って、第1実施例と同様に、「+側電磁石の吸引力F+」と、「−側電磁石の吸引力F−」とは(17)、(18)式のようになる。
F+=K(I0/x0)2 …(17)
F−=K(I0/x0)2 …(18)
よって、ロータRに振れ回りが発生していても、「+側電磁石の吸引力F+」および「+側電磁石の吸引力F−」がそれぞれ一定となるので、ステータ側には振動が発生しない。
【0039】
以上、第1実施例ないし第3実施例で説明したように、回転体の不釣り合いによってステータ側に発生する回転周波数成分の不釣り合い振動を著しく減少させることができるため、例えば、ターボ分子ポンプを電子顕微鏡などに装着する際に必要とされていた機械式のダンパなどを省略することが可能となり、装置全体の小型化、コストダウンを行える。
【0040】
また、従来、振れ回りによる振動を抑えるために行っていたロータの精密なバランス取が不要となるため、バランス取工程の時間が大幅に短縮される。
なお、帯域除去フィルタ41、帯域通過フィルタ42は、フィルタの中心周波数が回転周波数に同期して変化するトラッキング方式でもよいし、定常回転周波数に設定された固定方式でもよい。
【0041】
【発明の効果】
以上説明したように本発明によれば、変位検出手段が検出した回転体と電磁石とのギャップの変位に伴う信号の内、周波数抽出手段が抽出した回転体の回転周波数成分を取り出し、所定の処理をした後、電磁石に供給しているので、ギャップ変動分および電磁石に供給する電流の変動分がキャンセルされ、電磁石の吸引力は一定となる。従って、回転体の振れ回りがあっても、電磁石の吸引力は一定なので、ステータ側には振動が発生しない。
【図面の簡単な説明】
【図1】本発明の実施例の磁気軸受装置を適用する磁気軸受制御システムの1軸分の構成図である。
【図2】同上、磁気軸受制御回路の第1実施例のブロック図である。
【図3】同上、第1実施例に用いるフィルタの周波数特性図であって、(a)は帯域通過フィルタ、(b)は帯域除去フィルタである。
【図4】同上、磁気軸受制御回路の第2実施例のブロック図である。
【図5】同上、磁気軸受制御回路の第3実施例のブロック図である。
【図6】一般的な電磁石における電磁石電流の変動とギャップの変動との関係を説明する図である。
【図7】従来の磁気軸受制御回路の例を示すブロック図である。
【符号の説明】
R ロータ(回転体)
1a、1b 電磁石
3a、3b パワーアンプ
4 磁気軸受制御回路
4A 第1実施例の磁気軸受制御回路
4B 第2実施例の磁気軸受制御回路
4C 第3実施例の磁気軸受制御回路
41 帯域通過フィルタ(周波数抽出手段)
42 帯域除去フィルタ(周波数抽出手段)
43 乗算器(第1演算手段)
44 PID補償器
46 加算器(第2演算手段)
47 減算器(第2演算手段)
Claims (3)
- 回転体と、
この回転体を所定位置で磁気支持する電磁石と、
前記回転体と電磁石とのギャップの変位を検出する変位検出手段と、
この変位検出手段で検出された回転体と電磁石とのギャップの変動分信号の内、回転体の回転周波数成分を抽出する周波数抽出手段と、
この周波数抽出手段で抽出した回転周波数成分に、前記電磁石に供給する電磁石電流の一部をなす直流バイアス電流を乗算すると共に、前記回転体が所定位置に存在する場合におけるギャップの定常値で除算する第1演算手段と、
前記直流バイアス電流に対して、前記第1演算手段の出力結果を加算または減算し、この結果を前記電磁石に供給する第2演算手段とを備えたことを特徴とする磁気軸受装置。 - 前記周波数抽出手段は、帯域通過フィルタであることを特徴とする請求項1記載の磁気軸受装置。
- 前記周波数抽出手段は、前記ギャップの変動分信号の内、回転体の回転周波数成分を除去する帯域除去フィルタと、前記ギャップの変動分信号から、前記帯域除去フィルタの出力信号を減算する減算器とを備えたことを特徴とする請求項1記載の磁気軸受装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05409594A JP3565894B2 (ja) | 1994-03-24 | 1994-03-24 | 磁気軸受装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05409594A JP3565894B2 (ja) | 1994-03-24 | 1994-03-24 | 磁気軸受装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH07259854A JPH07259854A (ja) | 1995-10-09 |
| JP3565894B2 true JP3565894B2 (ja) | 2004-09-15 |
Family
ID=12961073
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP05409594A Expired - Lifetime JP3565894B2 (ja) | 1994-03-24 | 1994-03-24 | 磁気軸受装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3565894B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002122138A (ja) * | 2000-10-16 | 2002-04-26 | Seiko Instruments Inc | 磁気軸受装置 |
| JP2014033535A (ja) * | 2012-08-03 | 2014-02-20 | Kayaba Ind Co Ltd | モータ制御装置 |
| JP6613793B2 (ja) * | 2015-10-16 | 2019-12-04 | 株式会社島津製作所 | 磁気軸受装置およびロータ回転駆動装置 |
-
1994
- 1994-03-24 JP JP05409594A patent/JP3565894B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH07259854A (ja) | 1995-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0313727B1 (en) | Unstable vibration prevention apparatus for magnetic bearing system | |
| US5844339A (en) | Active magnetic bearing with auto position-detection | |
| GB2129582A (en) | Controlled magnetic bearing device | |
| JPH0572177B2 (ja) | ||
| US10968949B2 (en) | Magnetic bearing control device and vacuum pump | |
| KR20010042206A (ko) | 제어형 자기 베어링장치 | |
| EP0281632A1 (en) | Electromagnetic bearing controller | |
| JP3319030B2 (ja) | 磁気軸受の制御装置およびそれを用いた回転機械 | |
| EP2799732B1 (en) | Radial direction controller and magnetic bearing device utilizing same | |
| JP3565894B2 (ja) | 磁気軸受装置 | |
| JPS6166540A (ja) | 磁気軸受の制御装置 | |
| JP3259404B2 (ja) | 振動抑制装置 | |
| Park et al. | A magnetically suspended miniature spindle and its application for tool orbit control | |
| CN112162574A (zh) | 磁悬浮轴承转子振动控制方法、装置、设备及存储介质 | |
| EP0381898A2 (en) | Method and apparatus for cancelling vibrations of rotating machines with active magnetic bearings | |
| JP4344601B2 (ja) | 磁気軸受の低擾乱化制御装置 | |
| JPH048911A (ja) | 磁気軸受装置 | |
| JP3395170B2 (ja) | スラスト磁気軸受の制御装置及び方法 | |
| JP2001295841A (ja) | 磁気軸受の制御装置 | |
| JPH06261498A (ja) | 回転機の振動抑制装置 | |
| JP2957222B2 (ja) | 能動軸受のロータ支持制御装置 | |
| Xuan et al. | Magnetic bearing application by time delay control | |
| JP4889350B2 (ja) | 磁気軸受装置 | |
| JPH0787680B2 (ja) | ラジアル磁気軸受装置 | |
| JPH11325072A (ja) | 磁気軸受の制御装置及び制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20040302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040609 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080618 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090618 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100618 Year of fee payment: 6 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100618 Year of fee payment: 6 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100618 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110618 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120618 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 9 |
|
| EXPY | Cancellation because of completion of term |