JP3602575B2 - 内燃機関の気筒別空燃比推定装置 - Google Patents
内燃機関の気筒別空燃比推定装置 Download PDFInfo
- Publication number
- JP3602575B2 JP3602575B2 JP18294194A JP18294194A JP3602575B2 JP 3602575 B2 JP3602575 B2 JP 3602575B2 JP 18294194 A JP18294194 A JP 18294194A JP 18294194 A JP18294194 A JP 18294194A JP 3602575 B2 JP3602575 B2 JP 3602575B2
- Authority
- JP
- Japan
- Prior art keywords
- air
- fuel ratio
- cylinder
- value
- observer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
【産業上の利用分野】
この発明は多気筒内燃機関の排気系集合部に空燃比センサを設け、排気系の挙動を状態方程式で同定すると共に、オブザーバを介して各気筒空燃比(気筒毎空燃比)を推定する内燃機関の気筒別空燃比推定装置において、オブザーバの収束状況、即ち、各気筒空燃比の推定精度を簡易かつ正確に判定するようにしたものに関する。
【0002】
【従来の技術】
内燃機関の排気系に空燃比センサを設けて空燃比を検出することは良く行われており、その一例として特開昭59−101562号公報記載の技術を挙げることができる。また、本出願人も先に特願平3−359339号(特開平5−180059号)において、排気系の挙動を状態方程式で同定し、オブザーバを介して各気筒空燃比を推定する技術を提案している。尚、そこにおいて、空燃比センサは広域空燃比センサ、即ち、理論空燃比で出力が反転するO2 センサではなく、理論空燃比の前後を通じて排気ガス中の酸素濃度に比例した出力特性を有するものを使用している。
【0003】
【発明が解決しようとする課題】
上記した構成によって各気筒の空燃比を推定することができたが、運転状態によってはオブザーバの推定精度、換言すれば、オブザーバの収束状況が必ずしも良好ではない場合も生じる。そのようなオブザーバの推定値の信頼性が低い場合、それを用いて制御を行うと、却って制御性が悪化する事態が生じ得る。
【0004】
従って、この発明の目的は、多気筒内燃機関の排気系集合部に空燃比センサを設け、排気系の挙動を状態方程式で同定すると共に、オブザーバを介して各気筒空燃比を推定する内燃機関の気筒別空燃比推定装置において、オブザーバの収束状況、即ち、各気筒空燃比の推定精度を簡易かつ正確に判定するようにした内燃機関の気筒別空燃比推定装置を提供することにある。
【0005】
第2の目的は、多気筒内燃機関の排気系集合部に空燃比センサを設け、排気系の挙動を状態方程式で同定すると共に、オブザーバを介して各気筒空燃比を推定し、推定された各気筒空燃比に基づいて燃料噴射量を操作量として空燃比をフィードバック制御する内燃機関の気筒別空燃比推定装置において、オブザーバの収束状況、即ち、各気筒空燃比の推定精度を簡易かつ正確に判定し、それに応じてフィードバック補正項(ゲイン)の変更の可否を判断することで制御値が誤らないようにした内燃機関の気筒別空燃比推定装置を提供することにある。
【0006】
【課題を解決するための手段】
上記の目的を解決するために、請求項1項にあっては、多気筒内燃機関の排気系集合部に空燃比センサを配置してその出力から各気筒の入力混合気の空燃比を推定する装置であって、前記排気系の挙動を、各気筒空燃比を入力U(k)とし、集合部空燃比を出力Y(k)とする状態方程式で同定し、入力U(k)を所定の値としてオブザーバを構築して前記出力Y(k)を入力とし、各気筒空燃比を状態変数Xとして状態方程式からXハット(k)にて推定する推定手段、および推定された各気筒空燃比に基づいて燃料噴射量を操作量として空燃比をフィードバック制御するフィードバック制御手段を備えると共に、推定された状態変数Xハット(k)から集合部空燃比の推定値CXハット(k)を算出し、前記出力Y(k)と比較してオブザーバの収束状況を判定する判定手段を備え、前記フィードバック制御手段は、オブザーバの収束状況が不良と判定されたとき、前記空燃比をフィードバック制御するのに使用されるフィードバック補正項の変更を停止する如く構成した。
【0007】
尚、上記で「入力U(k)を所定の値として」とは、例えば同一気筒の空燃比を前回燃焼以前の空燃比と同一と仮定する、あるいは各気筒空燃比を目標空燃比とする、の意味である。
【0010】
上記の目的を達成するために、請求項2項にあっては、前記出力Y(k)として前記空燃比センサの出力を用いる如く構成した。
【0011】
上記の目的を達成するために、請求項3項にあっては、前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれか求め、所定値と比較してオブザーバの収束状況を判定する如く構成した。
【0012】
上記の目的を達成するために、請求項4項にあっては、前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれかを求め、第1の所定値と比較してそれを超えた回数をカウントし、カウント値を第2の所定値と比較してオブザーバの収束状況を判定する如く構成した。
【0013】
【作用】
請求項1項にあっては、推定された状態変数Xハット(k)から集合部空燃比の推定値CXハット(k)を算出し、前記出力Y(k)と比較してオブザーバの収束状況を判定する判定手段を備える如く構成したので、オブザーバの収束状況を簡易かつ正確に判定することができる。即ち、
【0014】
また、推定された状態変数Xハット(k)から集合部空燃比の推定値CXハット(k)を算出し、前記出力Y(k)と比較してオブザーバの収束状況を判定する判定手段、を備え、フィードバック制御手段は、オブザーバの収束状況が不良と判定されたとき、フィードバック補正項(ゲイン)の変更を停止する如く構成したので、オブザーバの収束状況を簡易かつ正確に判定することができると共に、それに応じてフィードバック補正項の変更を停止することができることから、制御値を誤ることがない。
【0015】
請求項2項にあっては、前記出力Y(k)として前記空燃比センサの出力を用いる如く構成したので、一層容易かつ正確にオブザーバの収束状況を判定することができる。
【0016】
請求項3項にあっては、前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれか求め、所定値と比較してオブザーバの収束状況を判定する如く構成したので、簡易かつ正確にオブザーバの収束状況を判定することができる。特に平均値を用いるときは、一過性の原因によって収束状況が低下したときは収束状況の低下と判定しないので、実際の運転状態に良くマッチした空燃比推定、ないしはそれに基づく空燃比フィードバック制御を行うことができる。
【0017】
請求項4項にあっては、前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれかを求め、第1の所定値と比較してそれを超えた回数をカウントし、カウント値を第2の所定値と比較してオブザーバの収束状況を判定する如く構成したので、一過性の原因によって収束状況が低下したときは収束状況の低下と判定しないので、実際の運転状態に良くマッチした空燃比推定、ないしはそれに基づく空燃比フィードバック制御を行うことができる。
【0018】
【実施例】
以下、添付図面に即してこの発明の実施例を説明する。
【0019】
図1はこの発明に係る内燃機関の気筒別空燃比推定装置を全体的に示す概略図である。図において符号10は4気筒の内燃機関を示しており、吸気路12の先端に配置されたエアクリーナ14から導入された吸気は、スロットル弁16でその流量を調節されつつインテークマニホルド18を経て第1ないし第4気筒に流入される。各気筒の吸気弁(図示せず)の付近にはインジェクタ20が設けられて燃料を噴射する。
【0020】
噴射されて吸気と一体となった混合気は、各気筒内で図示しない点火プラグで点火されて燃焼してピストン(図示せず)を駆動する。燃焼後の排気ガスは排気弁(図示せず)を介してエキゾーストマニホルド22に排出され、エキゾーストパイプ24を経て三元触媒コンバータ26で浄化されつつ機関外に排出される。また、吸気路12には、スロットル弁配置位置付近に、それをバイパスするバイパス路28が設けられる。
【0021】
内燃機関10のディストリビュータ(図示せず)内にはピストン(図示せず)のクランク角度位置を検出するクランク角センサ34が設けられると共に、スロットル弁16の開度を検出するスロットル開度センサ36、スロットル弁16下流の吸気圧力を絶対圧力で検出する絶対圧センサ38も設けられる。更に、排気系においてエキゾーストマニホルド22と三元触媒コンバータ26の間には酸素濃度検出素子からなる広域空燃比センサ40が設けられ、排気ガス中の酸素濃度に比例した値を出力する。これらセンサ34などの出力は、制御ユニット42に送られる。
【0022】
図2は制御ユニット42の詳細を示すブロック図である。広域空燃比センサ40の出力は検出回路46に入力され、そこで適当な線形化処理が行われ、理論空燃比を中心としてリーンからリッチにわたる広い範囲において排気ガス中の酸素濃度に比例したリニアな特性からなる空燃比(A/F)が検出される。その詳細は先に本出願人が提案した別の出願(特開平4−369471号)に述べられているので、これ以上の説明は省略する。尚、以下の説明において、このセンサを「LAFセンサ」(リニア・エーバイエフ・センサ)と称する。検出回路46の出力はA/D変換回路48を介してCPU50,ROM52,RAM54などからなるマイクロコンピュータに取り込まれ、RAM54に格納される。
【0023】
同様に、スロットル開度センサ36などのアナログ出力は、レベル変換回路56、マルチプレクサ58および第2のA/D変換回路60を介してマイクロコンピュータに入力される。またクランク角センサ34の出力は波形整形回路62で波形整形された後、カウンタ64で出力値がカウントされ、カウント値はマイクロ・コンピュータ内に入力される。マイクロコンピュータにおいてCPU50は、ROM52に格納された命令に従って検出値から制御値を演算し、駆動回路66を介して各気筒のインジェクタ20を駆動すると共に、第2の駆動回路68を介して電磁弁70を駆動し、図1に示したバイパス路28を通る2次空気量を制御する。
【0024】
図3はこの発明に係る内燃機関の気筒別空燃比推定装置の動作を説明するフロー・チャートであるが、これは先に提案した排気系の挙動を状態方程式で同定すると共に、オブザーバを介して各気筒空燃比を推定する技術を前提としているので、理解の便宜上、それについて簡単に説明する。
【0025】
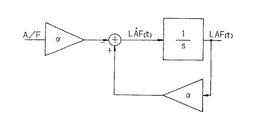
先ず、1個のLAFセンサの出力から各気筒の空燃比を精度良く分離抽出するためには、LAFセンサの検出応答遅れを正確に解明する必要がある。そこで、とりあえずこの遅れを1次遅れ系と擬似的にモデル化し、図4に示す如きモデルを作成した。ここでLAF:LAFセンサ出力、A/F:入力A/F、とすると、その状態方程式は下記の数1で示すことができる。
【0026】
【数1】
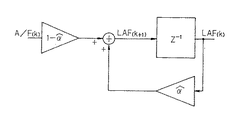
これを周期ΔTで離散化すると、数2で示すようになる。図5は数2をブロック線図で表したものである。
【0028】
【数2】
従って、数2を用いることによってセンサ出力より真の空燃比を求めることができる。即ち、数2を変形すれば数3に示すようになるので、時刻kのときの値から時刻k−1のときの値を数4のように逆算することができる。
【0030】
【数3】
【数4】
具体的には数2をZ変換を用いて伝達関数で示せば数5の如くになるので、その逆伝達関数を今回のセンサ出力LAFに乗じることによって前回の入力空燃比をリアルタイムに推定することができる。図6にそのリアルタイムのA/F推定器のブロック線図を示す。
【0033】
【数5】
続いて、上記の如く求めた真の空燃比に基づいて各気筒の空燃比を分離抽出する手法について説明すると、先願でも述べたように、排気系の集合部の空燃比を各気筒の空燃比の時間的な寄与度を考慮した加重平均であると考え、時刻kのときの値を、数6のように表した。尚、F(燃料量)を制御量としたため、ここでは『燃空比F/A』を用いているが、後の説明においては理解の便宜のため、支障ない限り「空燃比」を用いる。尚、空燃比(ないしは燃空比)は、先に数5で求めた応答遅れを補正した真の値を意味する。
【0035】
【数6】
即ち、集合部の空燃比は、気筒ごとの過去の燃焼履歴に重みC(例えば直近に燃焼した気筒は40%、その前が30%...など)を乗じたものの合算で表した。ここでCはn×mの行列である。このモデルをブロック線図であらわすと、図7のようになる。
【0037】
また、その状態方程式は数7のようになる。
【0038】
【数7】
また集合部の空燃比をy(k)とおくと、出力方程式は数8のように表すことができる。
【0040】
【数8】
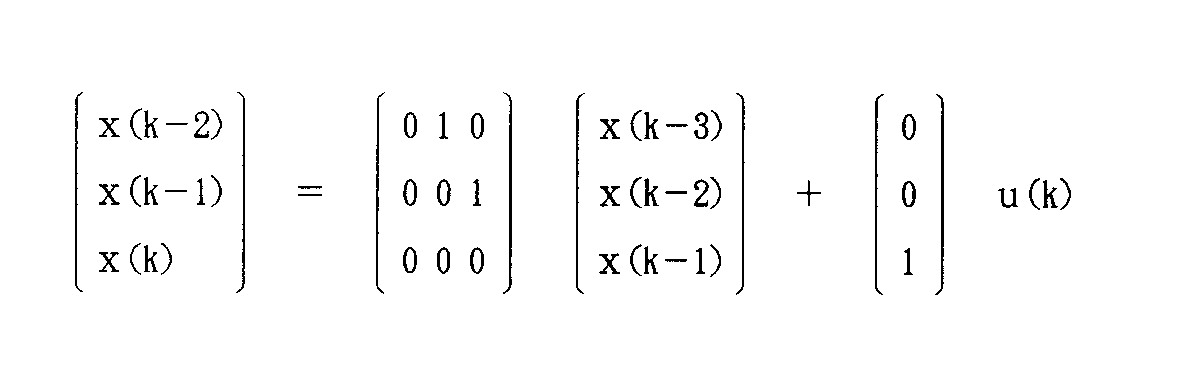
上記において、u(k)は観測不可能のため、この状態方程式からオブザーバを設計してもx(k)は観測することができない。そこで4TDC前(即ち、同一気筒)の空燃比は急激に変化しない定常運転状態にあると仮定してx(k+1)=x(k−3)とすると、数9のようになる。これは、u(k)を目標空燃比としても同様である。
【0042】
【数9】
ここで、上記の如く求めたモデルについてシミュレーション結果を示す。図8は4気筒内燃機関について3気筒の空燃比を14.7にし、1気筒だけ12.0にして燃料を供給した場合を示す。図9はそのときの集合部の空燃比を上記モデルで求めたものを示す。同図においてはステップ状の出力が得られているが、ここで更にLAFセンサの応答遅れを考慮すると、センサ出力は図10に「モデル出力値」と示すようになまされた波形となる。図中「実測値」は同じ場合のLAFセンサ出力の実測値であるが、これと比較し、上記モデルが多気筒内燃機関の排気系を良くモデル化していることを検証している。
【0044】
よって、数10で示される状態方程式と出力方程式にてx(k)を観察する通常のカルマンフィルタの問題に帰着する。その荷重行列Q,Rを数11のようにおいてリカッチの方程式を解くと、ゲイン行列Kは数12のようになる。
【0045】
【数10】
【数11】
【数12】
これより行列A−KCを求めると、数13のようになる。
【0049】
【数13】
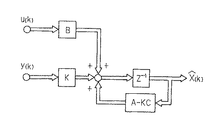
一般的なオブザーバの構成は図11に示されるようになるが、今回のモデルでは入力u(k)がないので、図12に示すようにy(k)のみを入力とする構成となり、これを数式で表すと数14のようになる。
【0051】
【数14】
ここでy(k)を入力とするオブザーバ、即ちカルマンフィルタのシステム行列は数15のように表される。
【0053】
【数15】
今回のモデルで、リカッチ方程式の荷重配分Rの要素:Qの要素=1:1のとき、カルマンフィルタのシステム行列Sは、数16で与えられる。
【0055】
【数16】
図13に上記したモデルとオブザーバを組み合わせたものを示す。シミュレーション結果は先の出願に示されているので省略するが、これにより集合部空燃比より各気筒の空燃比を的確に抽出することができる。
【0057】
上記を前提として図3フロー・チャートに従って説明する。
【0058】
尚、実施例の場合、各気筒空燃比を推定した後、推定値に基づいて各気筒空燃比を目標値にフィードバック制御する例を示す。即ち、オブザーバによって集合部空燃比より各気筒空燃比を推定することができたことから、PIDなどの制御則を用いて空燃比を気筒別に制御することが可能となるからである。
【0059】
具体的には図14に示すように、集合部空燃比を示すLAFセンサ出力KACTと目標空燃比とからPID制御則を用いて集合部フィードバック補正項(ゲイン)KLAFを求めると共に、オブザーバ推定値#nA/Fから気筒毎のフィードバック補正項(ゲイン)#nKLAF(n:気筒)を求める。
【0060】
気筒毎のフィードバック補正項#nKLAFはより具体的には、集合部A/Fを気筒毎のフィードバック補正項#nKLAFの平均値の前回演算値で除算して求めた目標値とオブザーバ推定値#nA/Fとの偏差を解消するようにPID則を用いて求める。これにより、各気筒の空燃比は集合部空燃比に収束し、集合部空燃比は目標空燃比に収束することとなって、結果的に全ての気筒の空燃比が目標空燃比に収束する。
【0061】
ここで、各気筒の燃料噴射量#nTout (インジェクタの開弁時間で規定される)は、
#nTout =Tim×KCMD×KTOTAL×#nKLAF×KLAF
で求められる。上記で、Tim:基本値、KCMD:目標空燃比、KTOTAL:その他の補正項、である。これ以外にバッテリ補正項などの加算項もあるが、省略する。尚、かかる制御の詳細は本出願人が先に提案した特願平6−33201号に述べられているので、これ以上の説明は省略する。
【0062】
以上を前提として実施例を図3フロー・チャートを参照して説明する。尚、このプログラムはTDCからの所定のクランク角度において、即ち、噴射順位(第1、第3、第4、第2気筒の順)毎に各気筒の燃料噴射量を決定する。
【0063】
先ず、S100において機関回転数Ne、吸気圧力Pb、LAFセンサ出力KACT(k)((k)は前記の如く離散時間系での時刻を示す)などを読み込み、S102に進んでクランキングか否か判断し、否定されるときはS104に進んでフューエルカットか否か判断する。S104でも否定されるときはS106に進んで前記した基本値Timを検索する。これは機関回転数と吸気圧力とから設定されたマップ(特性図示せず)を検索して行う。
【0064】
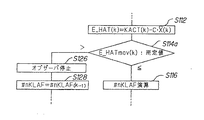
続いてS108に進んでLAFセンサ40の活性化が完了したか否か判断し、肯定されるときはS110に進んで前記したオブザーバ行列演算を行って各気筒空燃比(気筒毎A/F)を推定する。続いてS112に進んで値E.HAT(k)を算出し、S114に進んで算出値E.HAT(k)を所定値と比較し、オブザーバの収束状況を判定する。
【0065】
これについて説明すると、オブザーバの推定機能を表現する数14を書き直すと、数17に示すようになる。
【0066】
【数17】
数17において、y(k)−CXハット(k)に着目すると、数18のように示すことができる。
【0068】
【数18】
即ち、y(k)は前記した出力方程式で表される、排気系集合部空燃比、具体的にはLAFセンサが検出する実際の集合部空燃比に相当し、CXハット(k)は推定された各気筒空燃比(内部状態変数Xハット)に各気筒排気ガスの混ざり度合いを示す行列Cを乗じたことにより、集合部空燃比推定値に相当する。従って、y(k)−CXハット(k)は、集合部空燃比の実際値(LAFセンサ出力KACT)と推定値の差を表しており、換言すれば、差E.HAT(k)は、オブザーバの推定精度、即ち、オブザーバの収束状況を表す指標とみなすことができる。この発明は上記した知見に基づいてなされた。
【0070】
図3フロー・チャートに戻ると、S112でこの差E.HAT(k)を求め、S114に進んで所定値と比較する。所定値は、オブザーバの収束状況を判定するに適当な値、例えば0.1などとする。
【0071】
S114で差E.HAT(k)が所定値以下と判断されるときはオブザーバの収束状況が良好、即ち、所期の推定精度が得られていると判断し、S116に進んで気筒毎フィードバック補正項#nKLAFを図14に関して述べたように演算する。
【0072】
続いてS118に進み、気筒毎フィードバック補正項#nKLAFの学習値を演算する。具体的には、移動平均(ないしは加重移動平均)を求めて行う。尚、かく求めた学習値は、運転状態、具体的には燃料噴射量に応じて格納する。即ち、気筒毎フィードバック補正項#nKLAFはインジェクタ20の特性を示しているので、次に述べる出力燃料噴射量#nToutと対にして格納しておく。
【0073】
続いてS120に進み、図14に関して述べたように集合部フィードバック補正項KLAFを演算し、S122に進んで気筒毎の燃料噴射量#nTout を決定し、S124に進んで当該気筒のインジェクタ20の駆動回路に出力する。
【0074】
またS114で差E.HAT(k)が所定値を超えてオブザーバの収束状況が不良と判断されるときはS126に進んでオブザーバ(行列演算)の推定値(図14に#nA/Fで示す)を所定の値に固定する。所定の値は例えば、前回値#nA/F(k−1) (図示の簡略化のため、今回値にサブスクリプト(k)を付すのは省略する)とする。更に、この推定値をパラメータとして格納している場合、差E.HAT(k)に応じてパラメータの更新を禁止する。
【0075】
続いてS128に進んで気筒毎フィードバック補正項#nKLAFを前回値#nKLAF(k−1) とする。即ち、気筒との整合性からオブザーバ行列演算を間引くことなく、完全に中止し、オブザーバが停止される間は、停止直前の値に基づいて燃料噴射量を決定するようにした。これは、気筒間の空燃比のバラツキの度合いは本来的にそう変化するものではなく、気筒毎フィードバック補正項の値は集合部フィードバック補正項の値に比較すれば小さい値となり、1付近の値となるからである。そこで、オブザーバ推定値の信頼性が低い場合は、むしろ前回値を使用して誤った推定値を用いて却って制御性を悪化させることを回避した。
【0076】
尚、S108でLAFセンサ40の活性化が完了していないと判断されるときはS130に進んで学習で求めた値#nKLAFsty を読み出し、S132に進んでその値を気筒毎フィードバック補正項#nKLAFとした。即ち、気筒毎フィードバック補正項#nKLAFの値をアイドル運転状態において、前回値(k−1) との加重平均を
#nKLAFsty =W×#nKLAF+(1−W)×#nKLAFsty(k−1)
と求めて学習しておき、センサ活性化が完了していないときは最新の学習値を使用するようにした。ここで、#nKLAFsty :最新学習値、W:重み係数、#nKLAFsty(k−1): 前回学習値、である。これによって気筒毎フィードバック補正項#nKLAFに過去の燃焼履歴を一層良く反映させることができる。
【0077】
続いてS134に進んで集合部フィードバック補正項KLAFの値を1とし(集合部フィードバック制御の停止を意味する)、S122に進んで燃料噴射量#nTout を算出する。
【0078】
また、S102でクランキングと判断されるときはS136に進んで水温センサ(図1で図示省略)を通じて検出した水温から所定の特性に従ってクランキング時の燃料噴射量Ticr を算出し、S138に進んで始動モードの式(説明省略)に基づいて燃料噴射量Tout を決定する。
【0079】
更に、S104でフューエル・カットと判断されるときはS140に進んで燃料噴射量Tout を零とし、S142に進んでS126と同様にオブザーバ(行列演算)の推定値を所定の値に固定し、S144に進んでS128と同様に気筒毎フィードバック補正項#nKLAFを停止直前の値とする(これは学習値であっても良い)。尚、S142でオブザーバ(行列演算)推定値を所定の値に固定するのは、燃焼が行われず、正しい空燃比が計測できないためである。
【0080】
この実施例は上記の如く構成したので、オブザーバの収束状況(推定精度)を簡易に判定することができ、推定値の信頼性が低い際に、誤った推定値による制御を行って却って制御性を悪化させることがない。
【0081】
そしてオブザーバの収束状況が低下した場合には、燃料供給系の気筒間のバラツキは領域によって極端に変化することはないと思われることから、気筒毎フィードバック補正項#nKLAFは停止直前に演算された値を用いるようにしたため、気筒間の空燃比のバラツキがかなりの程度まで吸収されて各気筒の空燃比を目標値に精度良く収束させることが可能となる。それによって、目標空燃比を理論空燃比とするときは、三元触媒26の浄化率を向上させることができる。また、目標空燃比をリーン側に設定すれば、リーンバーン制御を精度良く実現することができる。
【0082】
図15はこの発明の第2実施例を示す、フロー・チャートの部分図である。第1実施例と相違する点に焦点をおいて説明すると、図3のS114に相当するS114aにおいて差E.HAT(k)の移動平均値E.HATmov (k)を求めて所定値と比較するようにした。
【0083】
これにより、例えば一過性の原因から差E.HAT(k)が増加したときなども収束状況低下と判定することがなく、その結果、実際の運転状態によりマッチしてオブザーバの収束状況を判定することができる。残余の構成および効果は、第1実施例と異ならない。尚、移動平均を用いたが、移動加重平均、加重平均などを用いても良い。
【0084】
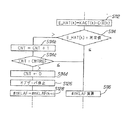
図16はこの発明の第3実施例を示す、フロー・チャートの部分図である。第2実施例と相違する点に焦点をおいて説明すると、図3のS114に相当するステップの後にS114b,S114c,S114dを追加し、差E.HAT(k)が所定値を超える回数をカウントし、カウント値が第2の所定値CNTREF、例えば3回を超えるときオブザーバ収束状況低下と判断し、カウント値を0にリセットした後、S126に進むようにした。
【0085】
これにより、第2実施例と同様に、例えば一過性の原因から差E.HAT(k)が増加したときなど収束状況低下と判定することがなく、その結果より実際の運転状態によりマッチしてオブザーバの収束状況を判定することができる。残余の構成および効果は、第1実施例と異ならない。
【0086】
尚、上記において、気筒毎の空燃比の推定動作とそれに基づく空燃比フィードバック制御動作とを併せて示したが、この発明の要旨は第1の目的に限っては気筒毎の空燃比の推定動作、より正確には気筒毎の空燃比を推定するオブザーバの収束状況の判定にあり、空燃比フィードバック制御動作を必須とするものではない。
【0087】
更には、空燃比センサとして広域空燃比センサを使用する場合を例にとって説明したが、いわゆるO2 センサを用いる場合にも妥当する。
【0088】
【発明の効果】
請求項1項にあっては、オブザーバの収束状況を簡易かつ正確に判定することができる。
【0089】
請求項2項にあっては、オブザーバの収束状況を簡易かつ正確に判定することができると共に、それに応じてフィードバック補正項の変更を停止することができて制御値を誤ることがない。
【0090】
請求項3項にあっては、一層容易かつ正確にオブザーバの収束状況を判定することができる。
【0091】
請求項4項にあっては、簡易かつ正確にオブザーバの収束状況を判定することができる。特に平均値を用いるときは、一過性の原因によって収束状況が低下したときは収束状況の低下と判定しないので、実際の運転状態に良くマッチした空燃比推定、ないしはそれに基づく空燃比フィードバック制御を行うことができる。
【0092】
請求項5項にあっては、一過性の原因によって収束状況が低下したときは収束状況の低下と判定しないので、実際の運転状態に良くマッチした空燃比推定、ないしはそれに基づく空燃比フィードバック制御を行うことができる。
【図面の簡単な説明】
【図1】この発明に係る内燃機関の気筒別空燃比推定装置を全体的に示すブロック図である。
【図2】図1中の制御ユニットの詳細を示すブロック図である。
【図3】この発明に係る内燃機関の気筒別空燃比推定装置の動作を示すフロー・チャートである。
【図4】この発明で前提とする空燃比センサの検出動作をモデル化した例を示すブロック図である。
【図5】図4に示すモデルを周期ΔTで離散化したモデルである。
【図6】空燃比センサの検出挙動をモデル化した真の空燃比推定器を示すブロック線図である。
【図7】内燃機関の排気系の挙動を示すモデルを表すブロック線図である。
【図8】図7に示すモデルを用いて4気筒内燃機関について3気筒の空燃比を14.7に、1気筒の空燃比を12.0にして燃料を供給する場合を示すデータ図である。
【図9】図8に示す入力を与えたときの図7モデルの集合部の空燃比を表すデータ図である。
【図10】図8に示す入力を与えたときの図7モデルの集合部の空燃比をLAFセンサの応答遅れを考慮して表したデータと、同じ場合のLAFセンサ出力の実測値を比較するグラフ図である。
【図11】一般的なオブザーバの構成を示すブロック線図である。
【図12】この発明で用いるオブザーバの構成を示すブロック線図である。
【図13】図7に示すモデルと図12に示すオブザーバを組み合わせた構成を示す説明ブロック図である。
【図14】この発明で併用する空燃比の気筒別フィードバック制御を示すブロック図である。
【図15】この発明の第2実施例を示す図3フロー・チャートの部分図である。
【図16】この発明の第3実施例を示す図3フロー・チャートの部分図である。
【符号の説明】
10 内燃機関
18 インテークマニホルド
20 インジェクタ
22 エキゾーストマニホルド
40 空燃比センサ(LAFセンサ)
42 制御ユニット
Claims (4)
- 多気筒内燃機関の排気系集合部に空燃比センサを配置してその出力から各気筒の入力混合気の空燃比を推定する装置であって、
a.前記排気系の挙動を、各気筒空燃比を入力U(k)とし、集合部空燃比を出力Y(k )とする状態方程式で同定し、入力U(k)を所定の値としてオブザーバを構築して 前記出力Y(k)を入力とし、各気筒空燃比を状態変数Xとして状態方程式からXハ ット(k)にて推定する推定手段、
および
b.推定された各気筒空燃比に基づいて燃料噴射量を操作量として空燃比をフィードバッ ク制御するフィードバック制御手段、
を備えると共に、
c.推定された状態変数Xハット(k)から集合部空燃比の推定値CXハット(k)を算 出し、前記出力Y(k)と比較してオブザーバの収束状況を判定する判定手段、
を備え、前記フィードバック制御手段は、オブザーバの収束状況が不良と判定されたとき、前記空燃比をフィードバック制御するのに使用されるフィードバック補正項の変更を停止することを特徴とする内燃機関の気筒別空燃比推定装置。 - 前記出力Y(k)として前記空燃比センサの出力を用いることを特徴とする請求項1項項記載の内燃機関の気筒別空燃比推定装置。
- 前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれか求め、所定値と比較してオブザーバの収束状況を判定することを特徴とする請求項1項または2項記載の内燃機関の気筒別空燃比推定装置。
- 前記判定手段は、集合部空燃比の推定値CXハット(k)と出力Y(k)の差E.HAT(k)およびその平均値のいずれかを求め、第1の所定値と比較してそれを超えた回数をカウントし、カウント値を第2の所定値と比較してオブザーバの収束状況を判定することを特徴とする請求項1項または2項記載の内燃機関の気筒別空燃比推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18294194A JP3602575B2 (ja) | 1994-07-12 | 1994-07-12 | 内燃機関の気筒別空燃比推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18294194A JP3602575B2 (ja) | 1994-07-12 | 1994-07-12 | 内燃機関の気筒別空燃比推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0828328A JPH0828328A (ja) | 1996-01-30 |
| JP3602575B2 true JP3602575B2 (ja) | 2004-12-15 |
Family
ID=16127053
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP18294194A Expired - Fee Related JP3602575B2 (ja) | 1994-07-12 | 1994-07-12 | 内燃機関の気筒別空燃比推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3602575B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3683356B2 (ja) * | 1996-08-08 | 2005-08-17 | 本田技研工業株式会社 | 内燃機関の空燃比制御装置 |
| JP4364777B2 (ja) | 2004-12-02 | 2009-11-18 | 本田技研工業株式会社 | 内燃機関の空燃比制御装置 |
-
1994
- 1994-07-12 JP JP18294194A patent/JP3602575B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0828328A (ja) | 1996-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3162553B2 (ja) | 内燃機関の空燃比フィードバック制御装置 | |
| JP4251081B2 (ja) | 内燃機関の制御装置 | |
| US5566071A (en) | Air/fuel ratio estimation system for internal combustion engine | |
| EP1091110A2 (en) | Air-fuel ratio control apparatus for multicylinder internal combustion engine | |
| JPH11200918A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP3980424B2 (ja) | 内燃機関の空燃比制御装置 | |
| JPH07247886A (ja) | 適応制御を用いたフィードバック制御装置 | |
| JP2684011B2 (ja) | 内燃機関の異常判定装置 | |
| US6397830B1 (en) | Air-fuel ratio control system and method using control model of engine | |
| JP3602575B2 (ja) | 内燃機関の気筒別空燃比推定装置 | |
| US5638802A (en) | Fuel metering control system for internal combustion engine | |
| JP3559338B2 (ja) | 内燃機関の吸入空気量推定装置 | |
| JP2684012B2 (ja) | 内燃機関の空燃比制御装置 | |
| US5669368A (en) | Fuel metering control system for internal combustion engine | |
| JP3749971B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JP3162567B2 (ja) | 内燃機関の気筒別空燃比推定装置 | |
| JP3162589B2 (ja) | 内燃機関の空燃比検出装置 | |
| JP2857689B2 (ja) | 内燃エンジンの吸気壁面温度推定装置及び燃料噴射量制御装置 | |
| JP3337339B2 (ja) | 内燃機関の吸入空気量推定装置 | |
| JP4186350B2 (ja) | 内燃機関の燃焼状態検出装置 | |
| JPH04116237A (ja) | 内燃機関の空燃比制御装置 | |
| JP3743591B2 (ja) | 内燃機関の空燃比制御装置 | |
| JP3768259B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JP3088058B2 (ja) | 内燃エンジンの燃料噴射量制御装置 | |
| JPH08232729A (ja) | 内燃機関の燃料噴射制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040924 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20071001 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081001 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081001 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091001 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091001 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101001 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |