JP3604577B2 - 直流モータ - Google Patents
直流モータ Download PDFInfo
- Publication number
- JP3604577B2 JP3604577B2 JP05086599A JP5086599A JP3604577B2 JP 3604577 B2 JP3604577 B2 JP 3604577B2 JP 05086599 A JP05086599 A JP 05086599A JP 5086599 A JP5086599 A JP 5086599A JP 3604577 B2 JP3604577 B2 JP 3604577B2
- Authority
- JP
- Japan
- Prior art keywords
- teeth
- motor
- winding
- phase
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images










Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Windings For Motors And Generators (AREA)
- Dc Machiner (AREA)
Description
【発明の属する技術分野】
この発明は、ステータのスロット数とロータの磁極数の比が9:8となる直流モータに関するものである。
【0002】
【従来の技術】
図9及び図10は従来のスロット数と磁極数が3:2となる3相直流モータを示す図で、図9はステータ及びロータ部分の構成図、図10はティースとロータとの位置関係説明図である。
図はステータ1のスロット2の数が12、ロータ4の磁極数が8の直流モータを示し、スロット2の数と同数のティース1a〜1cにそれぞれ同回数の巻線(図示しない)が集中的に巻回されている。3相直流モータであるため、1相当たりのティースは4個であり、これらが等間隔に配置されている。
【0003】
ティース1a〜1cとロータ4のマグネットに、図10のような関係があると仮定すると、1ティースに入るロータマグネットの磁束量B32aは、最大磁束密度をB、ティース1aの一端からの角度(位置)をθ、ロータ4の回転角をθrとすると、次の数式(1)のように示される。
【0004】
【数1】

ここで、ロータ4が角速度ω(θr=ωt、tは時間)で回転していると仮定すると、ティース1aに巻回された巻線に発生する誘起電圧V32aは、数式(2)のようになる。
【数2】
Ke:鉄心幅等に関する係数
以上から、1相に発生する誘起電圧V32を求めると、数式(3)のようになる。
【0006】
【数3】
誘起電圧V32と相に通電する電流の積によって、出力トルクが得られる。
次に、図11及び図12は従来のスロット数と磁極数が9:8となる3相直流モータを示す図で、図11はステータ及びロータ部分の構成図、図12はティースとロータとの位置関係説明図である。
図はステータ1のスロット2数が9、ロータ4の磁極数が8の直流モータを示し、それぞれのティース1a〜1cに巻線3が集中的に巻回される点では、上記の12スロット8極の直流モータと同様であるが、1相を構成するティース1a〜1cの配置が異なる。
【0008】
1相当たりのティース1a〜1cの数は3となり、これらが各相ごとに連続して配置される。また、同相で隣接するティースでは、巻線3の巻回方向が逆となっている。つまり、3個連続して配置されたティース1a〜1cは、両端のティース1a,1cと、中央のティース1bとで巻線3に電流を流したときに生じる磁極が異なる。
図12のような構成を考えると、3個のティース1a〜1cに入る磁束量B98a〜B98cは、数式(4)〜(6)のようになる。
【0009】
【数4】
上記と同様に、ロータ4が角速度ωで回転しているとすると、各ティース1a〜1cに巻回された巻線3に生じる誘起電圧V98a〜V98cは、各ティース1a〜1cに入る磁束量をB98a〜B98cとすると、数式(7)〜(9)のようになる。
【数5】
【0011】
【数6】
9スロット8極及び12スロット8極の直流モータを、同サイズ、同電流及び同巻回数で出力トルク(誘起電圧)を比較すると、数式(11)のようになる。
【0013】
【数7】
このように、9スロット8極の直流モータは、12スロット8極、つまりスロット:極数が3:2の組合せの直流モータと比較すると、出力が10%高いことが分かる。
また、コギングトルクに対しても、9スロット8極の直流モータは、有利である。コギングトルクは、ステータ1のスロット2の数とロータ4の磁極数の最小公倍数の周波数で発生し、その振幅は周波数に反比例する。
【0015】
9スロット8極のコギングトルクの周波数は72となり、12スロット8極の24と比べると周波数が高くなり、振幅は小さくなり、コギングトルクは低減される。
【0016】
【発明が解決しようとする課題】
上記のような従来の直流モータは9スロット8極にすることにより、一般によく用いられるスロット数:極数が3:2のものに比べて、高トルクで低コギングが得られるが、種々の負荷に対応できるように、更に高トルクの実現が要望されるという問題点がある。
【0017】
この発明は上記問題点を解消するためになされたもので、更に高効率化及び高出力化を図ることができるようにした9スロット8極の直流モータを提供することを目的とする。
【0018】
【課題を解決するための手段】
この発明の第1発明に係る直流モータは、9nスロット、8n極の直流モータにおいて、1相に配置された3個のティースのうち、中央のティースの先端の幅α[deg]を、40/n<α≦50/nとしたものである。
【0019】
また、第2発明に係る直流モータは、第1発明のものにおいて、各スロットの断面積をほぼ等しくしたものである。
【0020】
また、第3発明に係る直流モータは、第1又は第2発明のものにおいて、1相に配置された3個のティースのうち、中央のティースの巻線回数を、その両側のティースの巻線回数よりも多くしたものである。
【0021】
また、第4発明に係る直流モータは、第1又は第3発明のものにおいて、中央のティースの巻線部分の幅と、その両側のティースの巻線部分の幅とを異ならせたものである。
【0022】
また、第5発明に係る直流モータは、第4発明のものにおいて、3個のティースの巻線回数が等しいときは、各スロットの断面積をほぼ等しくし、巻線回数が異なるときは、中央のティースの両側のスロットの断面積を他のスロットの断面積よりも広く設定したものである。
【0023】
また、第6発明に係る直流モータは、第1〜第5発明のものを空気調和機の送風機駆動用に適用したものである。
【0024】
【発明の実施の形態】
実施の形態1
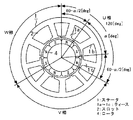
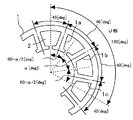
図1〜図3はこの発明の第1発明の一実施の形態を示す図で、図1はステータ及びロータ部分の構成図、図2はティースとロータとの位置関係説明図、図3はティース幅対誘起電圧比曲線図であり、図中同一符号は同一部分を示す(以下の実施の形態も同じ)。
【0025】
図1及び図2において、1はステータで、ティース1a〜1cが形成され、ティース1a〜1c間にスロット2が形成されている。また、ティース1a〜1cには巻線3が巻回されている。4はステータ1の内側に設けられマグネットからなるロータである。
すなわち、ステータ1はU相〜W相の3相に区分され、各相を構成する3個のティース1a〜1cは連続して配置され、それぞれに巻回される巻線3は、中央のティース1bだけ両側のティース1a,1cとは逆向きに巻回されている。これで、ステータ9スロット、ロータ8極の組合せを持つ3相直流モータが構成されている。
【0026】
ここで、1相当たりに発生する巻線2の誘起電圧とティース1a〜1cの幅の関係に注目する。
3個のティース1a〜1cのうち、中央のティース1bの幅をα[deg]とすると、1相を構成するティース1a〜1cの歯幅は、それぞれ60−α/2[deg],α[deg],60−α/2[deg]とすることができる。
【0027】
今、ロータ4の表面磁束密度の分布が正弦波形であると仮定し、1相を構成する3個のティース1a〜1cの一端からの角度(位置)をθ、ロータ4の回転角をθrとすると、ロータ4から各ティース1a〜1cに入る磁束量Ba〜Bcは、最大磁束密度をBとすると、下記の数式(12)〜(14)のように表すことができる。
【0028】
【数8】
今、ロータ4が角速度ωで回転している(θr=ωt、t:時間)と仮定すると、ティース1a〜1cの巻線3に発生する誘起電圧Va〜Vcは下記の数式(15)〜(17)のようになる。
【数9】
Ke:鉄心幅等に関する係数
【0030】
これで、1相に発生する誘起電圧1αを求めると、下記の数式(18)のように表すことができる。
【0031】
【数10】
このようにして得られた誘起電圧Vαと、図12に示す各ティース1a〜1cの各幅を等間隔に配置した場合の誘起電圧V40とを比較すると数式(19)のようになる。
【0033】
【数11】
ティース1bの幅をパラメータとして、数式(19)の値を求めると、図3のようになる。
図3で明らかなように、中央のティース1bの幅α[deg]が、40<α<50の範囲にあるとき、従来のティース1a〜1cを等間隔に配置した場合よりも高い誘起電圧Vαが発生する。直流モータの出力トルクは、誘起電圧と相を流れる電流の積により得られるため、同一の電流を流したときに発生するトルクは、中央のティース1bの幅が、40<α<50の範囲に設定したときに大きくなる。
【0035】
このようにして、1相を構成する3個のティース1a〜1cの幅を、両端と中央とで不等間隔にすることにより、モータの出力を向上することが可能となる。
コギングトルクについてはティース1a〜1cの幅が等間隔でなくなることから、既述の72倍の周波数の脈動が得られなくなるため、その振幅は大きくなる可能性がある。
【0036】
しかし、72倍の周波数の1周期は5[deg]となり、実際にはステータ1及びロータ4の寸法の精度によっては、正確に72倍の周波数の脈動が発生しない可能性が高い。例えば、ロータ4の磁極のピッチや磁力に不平衡が生じた場合、スロット2の数と同じ9倍の周波数のコギングトルクの脈動が発生する可能性がある。また、ロータ4の軸が偏心している場合には、ロータ4の磁極数と同じ8倍の周波数のコギングトルク脈動が発生する可能性もある。
【0037】
これらの影響を考えると、実施の形態1のようなステータ1の構成にすることにより、理想的なコギングトルクと比較すれば、その振幅が大きくなる可能性はあるが、実際には、製造上のばらつきを考慮に入れれば、それほど大きな影響を与えることはなく、実用上有用なものとすることが期待できる。
【0038】
実施の形態2
図4はこの発明の第2発明の一実施の形態を示すステータ部の構成図(一部省略)である。
この実施の形態では、実施の形態1と同様、ステータ1の1相を形成する3個のティース1a〜1cの先端の幅は、60−α/2[deg],α[deg],60−α/2[deg](40<α<50)となっている。しかし、スロット2の断面積がほぼ均一になるように、ティース1a〜1cの巻線部の幅と配置を選んでいる点が異なる。
【0039】
図4では、ティース1a〜1cの巻線部の幅をすべて同一とし、その配置を40[deg]ごとに等間隔にしている。これによって、各スロット2の断面積は均一となる。そして、各ティース1a〜1cに施される巻線3の巻回数は、すべてのティース1a〜1cに対して同回数としている。このような構成によって、実施の形態1において生じる巻線3の占積率の低下を防止するものである。
【0040】
すなわち、各スロット2の断面積が異なる場合には、スロット2に収納される巻線3の量は、断面積の狭いスロット2の面積で制限を受けてしまい。全体として占積率は低下する。このため、図4のステータ1では、ティース1a〜1cの先端の幅だけを不等間隔にして、各スロット2の断面積が均一となるようにティース1a〜1cの巻線部を配置してある。このようにして、巻線3の占積率の低下を抑えつつ、出力の向上を図ることが可能となる。
【0041】
実施の形態3
図5及び図6はこの発明の第3発明の一実施の形態を示すティースの巻線状態説明図、図6は誘起電圧と通電電流の位相関係を示す波形図である。
この実施の形態では、従来と同様、ステータ1の1相を形成する3個のティース1a〜1cの形状が連続して配置されているが、3個のティース1a〜1cに巻回される巻線3の巻回数が異なっている。図5では、ティース1a,1cにm回、ティース1bにm回巻回されており、nとmの関係は、n<mとなっている。
【0042】
実施の形態1において述べたように、中央のティース1bの先端の幅を広げることで、1相に発生する誘起電圧が高くなり、出力が向上することから、発生するトルクは中央のティース1bが寄与する割合が大きいことが分かる。これは、図6に示す各ティース1a〜1cに発生する誘起電圧とモータの駆動電流との関係を見れば明らかとなる。すなわち、各ティース1a〜1cに発生する誘起電圧は、それぞれ位相が異なっている(ただし、各ティース1a〜1cの巻線3の巻回数は同一とした場合を示している)。
【0043】
これは、ティース1a〜1cの幅が40[deg]間隔であるのに対して、ロータ4の磁極が45[deg]間隔であるために生じるもので、電気角ではそれぞれ20[deg]ずれている。相に発生する誘起電圧は、これらの合成によるものとなり、モータを駆動する際には、中央のティース1bの誘起電圧の位相に合わせて電流を通電する。このため、ティース1aでは進み位相の通電、ティース1cでは遅れ位相の通電となり、最適な位相での通電がなされず、ティース1a〜1cの巻線3の巻回数が同回数の場合、効率的にトルクを発生することができない。
【0044】
このため、図5のステータ1では、ティース1bの巻線2の巻回数をティース1a,1cよりも多くしたものであり、出力トルクを向上させることが可能となる。
特に、実施の形態1のように、ティース1a〜1cを不等間隔に配置したステータ1の場合には、各スロット2の断面積が不均一となっているため、ティース1bの巻線回数を多くすることで、スロット断面積の不均一による巻線占積率の低下を改善することも可能となる。
【0045】
しかし、1ティースに対する巻線回数を増加させると、巻線3のコイル端部が大きくなり、巻線抵抗が増加する。このため、モータ駆動時の銅損(巻線3の抵抗により生じる損失)が増大する。したがって、巻線3の巻回数nと巻回数mの値の取り得る範囲はある程度限定され、その範囲内で最適値が存在する。
【0046】
実施の形態4
図7はこの発明の第4及び第5発明の一実施の形態を示すステータ部の構成図(一部省略)である。
この実施の形態では、1相を構成する3個のティース1a〜1cのうち、中央のティース1bだけ巻線部の幅が異なっている。
図7では、中央のティース1bの幅をγ、両側のティース1a,1cの幅をβとしており、幅γと幅βで寸法が異なっている。
【0047】
実施の形態1のように、中央のティース1bの先端の幅を広くすると、そこに入るロータ4の磁束は、両側のティース1a,1cよりも多くなるため、巻線部の磁束部の磁束密度は高くなる。一方実施の形態3のように、中央のティース1bの巻線3の巻回数を多くすると、巻線3に通電したときに生じる磁束密度も、両側のティース1a,1cよりも高くなる。このため、巻線部の幅を広げることで、磁束密度を下げ、鉄損の増加を防ぎ、効率を改善することが可能となる。
【0048】
このとき、ステータ1のスロット2の断面積は、3個のティース1a〜1cの巻線3の巻回数が等しい場合には均一にし、巻線3の巻回数が異なる場合には、中央のティース1bの両側のスロット2の断面積を広くするように、ティース1a〜1cの巻線部の寸法を設定すると、巻線3の占積率を向上することができ、高効率化が可能となる。
【0049】
実施の形態5
図8はこの発明の第6発明の一実施の形態を示す空気調和機の構成図である。
図において、11は室内機で室外機12に接続されている。室内機12には、上記各実施の形態に示した直流モータ13によって駆動される送風機14を有している。
【0050】
送風機14用の直流モータ13は、低騒音で効率の良いことが求められるため、コギングトルクが小さく、出力トルクが高く、かつ効率の良いスロット数9n、磁極数8nの直流モータ13は、それに適している。これに対して、上記各実施の形態に示した直流モータ13は更に出力が高く、かつ効率が良いため、送風機14用として好適なものとなっている。これにより、低騒音で効率の良い送風機用直流モータ13とすることが可能となる。
【0051】
【発明の効果】
以上説明したとおりこの発明の第1発明では、1相に配置された3個のティースのうち、中央のティースの先端の幅α[deg]を、40/n<α≦50/nとしたので、3相直流モータの出力トルクを向上することができる。
【0052】
また、第2発明では、各スロット断面積をほぼ等しくしたので巻線の占積率の低下を改善し、モータの高効率化を図ることができる。
【0053】
また、第3発明では、1相に配置された3個のティースのうち、中央のティースの巻線回数を、その両側のティースの巻線回数よりも多くしたので、3相直流モータの出力トルクを更に向上することができる。
【0054】
また、第4発明では、中央のティースの巻線部分の幅と、その両側のティースの巻線部分の幅を異ならせたので、ティースの磁束密度が高くなるのを抑え、モータの高効率化を図ることができる。
【0055】
また、第5発明では、3個のティースの巻線回数が等しいときは、各スロットの断面積をほぼ等しくし、巻線回数が異なるときは、中央のティースの両側のスロットの断面積を他のスロットの断面積よりも広く設定したので、巻線の占積率を向上させることができ、モータの高効率化を図ることができる。
【0056】
また、第6発明では、上記の直流モータを空気調和機の送風機駆動用に適用したので、低騒音かつ高効率な送風用モータを得ることができる。
【図面の簡単な説明】
【図1】この発明の実施の形態1を示すステータ及びロータ部分の構成図。
【図2】図1のティースとロータとの位置関係説明図。
【図3】この発明の実施の形態1を示すティース幅対話誘起電圧比曲線図。
【図4】この発明の実施の形態2を示すステータ部の構成図(一部省略)。
【図5】この発明の実施の形態3を示すティースの巻線状態説明図。
【図6】この発明の実施の形態3を示す誘起電圧と通電電流の位相関係を示す波形図。
【図7】この発明の実施の形態4を示すステータ部の構成図(一部省略)。
【図8】この発明の実施の形態5を示す空気調和機の構成図。
【図9】従来のスロット数と磁極数が3:2となる3相直流モータのステータ及びロータ部分の構成図。
【図10】図9のティースとロータとの位置関係説明図。
【図11】従来のスロット数と磁極数が9:8となる3相直流モータのステータ及びロータ部分の構成図。
【図12】図11のティースとロータとの位置関係説明図。
【符号の説明】
1 ステータ、1a〜1c ティース、2 スロット、3 巻線、4 ロータ、11 空気調和機の室内機、12 空気調和機の室外機、13 直流モータ、14 送風機
Claims (6)
- 8n(nは自然数)個の磁極を有するロータと、9n(nは自然数)個のスロット及びこのスロット間に形成され、1相につき3個配置されたティースを有する鉄心に巻線が施されたステータとにより構成された直流モータにおいて、上記3個のティースのうち、中央のティースの先端の幅α[deg]を、40/n<α≦50/n(nは自然数)としたことを特徴とする直流モータ。
- 各スロットの断面積をほぼ等しくしたことを特徴とする請求項1記載の直流モータ。
- 1相に配置された3個のティースのうち、中央のティースの巻線回数を、その両側のティースの巻線回数よりも多くしたことを特徴とする請求項1又は請求項2記載の直流モータ。
- 中央のティースの巻線部分の幅と、その両側のティースの巻線部分の幅とを異ならせたことを特徴とする請求項1又は請求項3記載の直流モータ。
- 3個のティースの巻線回数が等しいときは、各スロットの断面積をほぼ等しくし、上記巻線回数が異なるときは、中央のティースの両側のスロットの断面積を他のスロットの断面積よりも広く設定したことを特徴とする請求項4記載の直流モータ。
- 空気調和機の送風機駆動用に適用したことを特徴とする請求項1〜請求項5のいずれかに記載の直流モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05086599A JP3604577B2 (ja) | 1999-02-26 | 1999-02-26 | 直流モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05086599A JP3604577B2 (ja) | 1999-02-26 | 1999-02-26 | 直流モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000253602A JP2000253602A (ja) | 2000-09-14 |
| JP3604577B2 true JP3604577B2 (ja) | 2004-12-22 |
Family
ID=12870633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP05086599A Expired - Lifetime JP3604577B2 (ja) | 1999-02-26 | 1999-02-26 | 直流モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3604577B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4497394B2 (ja) * | 2001-04-20 | 2010-07-07 | 日立アプライアンス株式会社 | 熱交換器及び空気調和機 |
| JP4468740B2 (ja) * | 2003-06-13 | 2010-05-26 | パナソニック株式会社 | モータ |
| JP2005033924A (ja) * | 2003-07-14 | 2005-02-03 | Honda Motor Co Ltd | 電動機および電動機を搭載した電動パワーステアリング装置 |
| JP4283618B2 (ja) * | 2003-08-29 | 2009-06-24 | セイコープレシジョン株式会社 | 電磁アクチュエータ |
| JP4586717B2 (ja) * | 2004-12-10 | 2010-11-24 | 日本電産株式会社 | モータ |
| JP2008211918A (ja) | 2007-02-27 | 2008-09-11 | Kokusan Denki Co Ltd | 回転電機 |
| JP2010057208A (ja) * | 2008-08-26 | 2010-03-11 | Kokusan Denki Co Ltd | 回転電機 |
| WO2011115634A1 (en) * | 2010-03-15 | 2011-09-22 | Motor Excellence Llc | Transverse and/or commutated flux systems having phase offset |
| JP5252607B2 (ja) * | 2010-04-13 | 2013-07-31 | エー ビー ビー リサーチ リミテッド | 円周状にスキューされた回転子極または固定子コイルを有する電気機械 |
| EP2950431B1 (en) | 2013-01-24 | 2018-09-12 | Mitsubishi Electric Corporation | Synchronous electric motor |
| CN107534328B (zh) | 2015-06-17 | 2019-11-29 | 三菱电机株式会社 | 定子芯、永磁体同步电动机以及空气调节器 |
| JP6391826B2 (ja) * | 2015-06-17 | 2018-09-19 | 三菱電機株式会社 | 固定子コア及び永久磁石同期電動機 |
| US10833549B2 (en) | 2015-10-28 | 2020-11-10 | Mitsubishi Electric Corporation | Rotary electric machine |
| US10693336B2 (en) * | 2017-06-02 | 2020-06-23 | Whirlpool Corporation | Winding configuration electric motor |
| CN113544944B (zh) | 2019-03-04 | 2024-01-02 | 三菱电机株式会社 | 发电电动机及其制造方法 |
| CN110739823B (zh) * | 2019-12-11 | 2021-05-11 | 山东理工大学 | 一种电动汽车永磁驱动电机 |
| CN113890296B (zh) * | 2021-10-08 | 2022-10-28 | 哈尔滨工业大学 | 低空间谐波单双层不等匝绕组径向磁通六相永磁同步电机 |
-
1999
- 1999-02-26 JP JP05086599A patent/JP3604577B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000253602A (ja) | 2000-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3604577B2 (ja) | 直流モータ | |
| JP3995450B2 (ja) | 永久磁石型回転電機 | |
| JP3282427B2 (ja) | 永久磁石モータ | |
| JP3748387B2 (ja) | 永久磁石式回転電機及びそれを用いた発電システムと駆動システム | |
| JP2652080B2 (ja) | ハイブリッド形ステッピングモータ | |
| US5886440A (en) | Electric motor with plural rotor portions having pole members of different widths | |
| US6867524B2 (en) | Rotor skew methods for permanent magnet motors | |
| JP4626405B2 (ja) | ブラシレスモータ | |
| US8350435B2 (en) | Interior magnet machine with reduced cogging | |
| EP0909009A1 (en) | Brushless DC motor using permanent magnet | |
| CN1081844C (zh) | 永磁体插入式转子结构 | |
| JPH07194079A (ja) | 永久磁石直流モータ | |
| JPH11150931A (ja) | 3相ステッピングモータとその駆動方法 | |
| JP2008514166A (ja) | 同期機 | |
| JP5609844B2 (ja) | 電動機 | |
| JP5188746B2 (ja) | ブラシレスdcモータ | |
| WO2001057987A1 (en) | Brushless dc motor having reduced cogging torque | |
| US20070170802A1 (en) | Permanent-magnet excited synchronous motor | |
| JPH10210721A (ja) | リラクタンスモータ | |
| US6836044B2 (en) | Permanent magnet type rotary electric device | |
| JP2001025182A (ja) | 永久磁石モータ | |
| EP2104208A2 (en) | Systems and methods involving optimized motors | |
| EP1670119A1 (en) | Motor with Improved flux distribution | |
| US7109624B2 (en) | Synchronous electric machine | |
| US20080290754A1 (en) | AC Motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040302 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040928 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040929 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20071008 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081008 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091008 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091008 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101008 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111008 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121008 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |