JP3630880B2 - 視線検出装置及び光学機器 - Google Patents
視線検出装置及び光学機器 Download PDFInfo
- Publication number
- JP3630880B2 JP3630880B2 JP27992596A JP27992596A JP3630880B2 JP 3630880 B2 JP3630880 B2 JP 3630880B2 JP 27992596 A JP27992596 A JP 27992596A JP 27992596 A JP27992596 A JP 27992596A JP 3630880 B2 JP3630880 B2 JP 3630880B2
- Authority
- JP
- Japan
- Prior art keywords
- pupil
- edge
- circle
- edges
- center position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Landscapes
- Automatic Focus Adjustment (AREA)
- Eye Examination Apparatus (AREA)
Description
【発明の属する技術分野】
本発明は、ディスプレイ等を観察する観察者の視線を検出する視線検出装置及び該視線検出装置を有するカメラ等の光学機器の改良に関するものである。
【0002】
【従来の技術】
従来より、観察者がファインダ上のどの位置を観察しているかを検出する、いわゆる視線検出装置が種々提案されている。例えば特開平1−274736号公報においては、光源からの平行光束を観察者の眼球に投射し、角膜からの反射像いわゆる角膜反射像(以下、P像(プルキニエ像)とも記す)と瞳孔の結像位置を利用して視軸を求めている。この視線検出装置の一例を、図12〜図16を用いて説明する。
【0003】
図12は視線検出装置の電気的構成の要部を示すブロック図であり、1はシステム全体のシーケンスを司るシーケンスコントローラ、2,3は観察者の眼球を照明する為に該観察者に対して水平方向に並置された1対のIRED、4は前記IRED2,3を駆動する為のIREDドライバ、5は前記IRED2,3にて照明された眼球像を読み込む為のCCD等の撮像素子、6は前記撮像素子5で読み込まれた画像信号を処理し易いようにA/D変換するA/Dコンバータ、7は視線検出の開始/停止を設定する為のプッシュスイッチ、8はシステム全体に電源を供給する電池である。
【0004】
図13は従来の視線検出装置の一連の動作の一例を示すフローチャートであり、図14は観察者が視線検出装置に近接した接眼状態の時に図12の撮像素子5に投影される眼球像を示す図、図15は図14の撮像素子5上のP像が存在するラインの画像出力を示す図である。
【0005】
図13において、シーケンスコントローラ1は、まずIRED2,3を観察者の眼球に向けて点灯させる(ステップ#1)。次に、その時の眼球像を撮像素子5によって読み込み、A/Dコンバータ6を介してディジタル化して画像信号として内部のRAMに格納する(ステップ#2)。そして、前記画像信号を処理してP像を抽出する(ステップ#3)。
【0006】
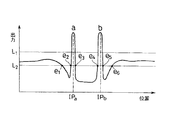
P像の抽出の仕方としては、P像は明るくその出力は急峻であることを利用して、信号が一定レベル以上で、しかも傾きが大きいものをP像と見なす。例えば眼球像が図14であったとする。この眼球像において、P像はaとbであるが、これらを検出する為にP像条件を、信号レベルがL1 (図15参照)以上であり、傾きが一定値以上であるとすると、P像a,bは水平ラインy1 で、図15の様に条件を満たし、それらの位置はL1 を越える部分の重心演算等によってIPa,IPbとして求められる。
【0007】
次に、シーケンスコントローラ1は画像信号を処理して瞳孔エッジを抽出する(ステップ#4)。
【0008】
瞳孔エッジの抽出の仕方としては、瞳孔部分は暗く、虹彩部分がそれよりも明るいことを利用して、信号レベルが一定値レベル(これを図15に示す様にL2 とする)であり、しかも一定期間以上傾きが継続する場合のL2 との交点を瞳孔エッジとみなすものとする。
【0009】
例えば、眼球像が前述の様に図14であった場合の水平ラインy1 における瞳孔エッジは、図15に示すe1 ,e6 が適正な瞳孔エッジとなる。しかしながら、P像a,bの裾野も瞳孔エッジの条件を満たしてしまうので、e2 ,e3 、e4 ,e5 も本当は瞳孔エッジで無いにも拘らず瞳孔エッジとして処理される。従って、これを避ける為に、特開平6−148509号公報において提案されている様に、瞳孔エッジ抽出後、P像周辺の一定領域内にある瞳孔とみなしたエッジ(図15のe2 ,e3 ,e4 ,e5 )を取り除く(ステップ#5)。
【0010】
また、瞳孔エッジ抽出(ステップ#4)の際、エッジの傾きの方向により、負の傾きであるもの(図15におけるe1 )と正の傾きであるもの(図15におけるe6 )を瞳孔中心から見た方向でそれぞれ左エッジ,右エッジと呼んで2つのグループに区別して抽出するものとする。
【0011】
上記ステップ#5においてP像周辺の偽エッジを排除したが、これ以外にもまつ毛やその他種々のノイズによって偽エッジが発生する。
【0012】
図14の黒点は、検出され得る偽エッジを含めた全てのエッジを表している。これら偽エッジを排除するために、特開平4−347132号公報において提案されている様に、P像位置情報に基づいて、確からしいエッジの座標範囲を指定し、この範囲外のエッジを排除する(ステップ#6)。
【0013】
図14においては、Fがその指定範囲に当たり、これによって範囲F以外のエッジ、例えばe10,e11等が排除される。この排除手段によってもまだ若干の偽エッジが残る。これらをさらに排除するため、特開平6−148509号公報において提案されている様に、シーケンスコントローラ1は残りのエッジ座標に対する統計的処理を行い、全体に対して大きく離れたエッジを偽エッジとして排除する(ステップ#7)。
【0014】
図16はこの「統計量による排除」を示すサブルーチンである。
【0015】
図16において、まず残った瞳孔エッジのうち、左エッジ(図17に示す黒点)の水平方向座標の平均値mLH及び標準偏差σLHを求める(ステップ#21)。そして左エッジの内で標準偏差外の大きく離れた座標、即ち
水平方向座標>mLH+σLH
または
水平方向座標<mLH−σLH
である左エッジを排除する(ステップ#22)。
【0016】
次に、残った左エッジの垂直方向座標の平均値mLV及び標準偏差σLVを求める(ステップ#23)。そして、左エッジの内で標準偏差外の大きく離れた座標、即ち
垂直方向座標>mLV+σLV
または
垂直方向座標<mLV−σLV
である左エッジを排除する(ステップ#24)。
【0017】
同じ様にして、右エッジの水平方向座標の平均値mRH及び標準偏差σRHを求め(ステップ#25)、右エッジの内で標準偏差外の大きく外れた座標、即ち
水平方向座標>mRH+σRH
または
水平方向座標<mRH−σRH
である右エッジを排除する(ステップ#26)。
【0018】
次に、残った右エッジの垂直方向座標の平均値mRV及び標準偏差σRVを求める(ステップ#27)。そして、右エッジの内で標準偏差外の大きく外れた座標、即ち
垂直方向座標>mRV+σRV
または
垂直方向座標<mRV−σRV
である左エッジを排除する(ステップ#28)。
【0019】
以上の処理が終ったら、図13のステップ#8で瞳孔中心の検出を行う。ここでは瞳孔部が円形状(円形若しくは楕円形)であることを利用して最小二乗法等を用いて瞳孔中心を求める。この計算の後、計算値の確からしさをチェックするため、求められた瞳孔中心位置と各瞳孔エッジ位置をもとに瞳孔円推定誤差CERの計算を行う(ステップ#9)。計算の方法は、特開平4−347131号公報において提案されている様に、二乗誤差を用いて行う。そして、求められた瞳孔円推定誤差CERが確からしいとするしきい値CT 以下かどうかをチェックし(ステップ#10)、CT 以下ならば求められた瞳孔中心位置とP像位置に基づいて眼球回転角の計算を行い(ステップ#12)、視線検出を終了する。
【0020】
また、上記ステップ#10で瞳孔円推定誤差CERがCT よりも大きかった場合は、瞳孔エッジの中に未だ偽エッジが多く含まれていたとして、偽エッジの更なる排除、即ち「瞳孔円修正」を行い(ステップ#11)、再び瞳孔中心の計算(ステップ#8)に戻る。
【0021】
図18は上記ステップ#11における「瞳孔円修正」を説明するフローチャートである。
【0022】
図18において、シーケンスコントローラ1は、まずこの瞳孔円修正が1回目(初めての修正)かどうかをチェックする(ステップ#31)。1回目ならば、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#33)、エッジを1個抜く(ステップ#35)。ここでエッジを抜く順は特に考慮せず、とりあえずは左エッジから抜いていくものとし、さらに左エッジ内で抜く順番はシーケンスコントローラ内のメモリに保存されている順(通常は抽出された順)とする。
【0023】
また、ステップ#31で瞳孔円修正が1回目でない場合、即ち1回目もしくは2回目以降の円修正後、図13のステップ#8に戻り、その後再度ステップ#10で瞳孔円推定誤差CERがしきい値CT 以下でなく、再びステップ#11で「瞳孔円修正」を行う場合、求められた最新の瞳孔円推定誤差CERがエッジを抜く前の瞳孔円推定誤差CER、即ちCER0 よりも小さくなっている(これは抜いたエッジが偽エッジであり、真円に近づいていることを意味する)かどうかをチェックする(ステップ#32)。ここで、「CER<CER0 」でなければ、抜いたエッジは偽エッジでなかったとしてもとに戻し(ステップ#34)、順番に次のエッジを抜く(ステップ#35)。
【0024】
また、上記ステップ#32において、「CER<CER0 」であった場合は、抜いたエッジはそのままにして、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#33)、やはり順番に次のエッジを抜き(ステップ#35)、図13のステップ#8へ戻る。
【0025】
【発明が解決しようとする課題】
上記従来例では、統計量によるエッジ排除においては、各エッジの水平方向座標及び垂直方向座標に対する統計量により行っているが、この方法では、左エッジ若しくは右エッジの内の大きく外れたエッジを排除することになり、それが偽エッジであれば良いが、正しいエッジを抜いてしまうことも多い。
【0026】
例えば図17において、垂直方向の統計量の排除を行うと、e61,e62などの正しい瞳孔エッジが排除されることになる。従って、この後瞳孔中心を求める際、正しいエッジが少なくなることによって瞳孔中心位置の検出誤差が大きくなっていまい、最終的な眼球回転角も本当の値と外れることにもなる。
【0027】
次に、別の従来例の課題について説明する。
【0028】
図19は、従来の視線検出装置の一連の動作(図13に対応)を示すフローチャートの他の例である。なお、該視線検出装置の電気的構成は図12と同様であるので同一の符号を付して説明するが、ここではその図示は省略する。
【0029】
図19において、シーケンスコントローラ1は、まずIRED2,3を観察者の眼球に向けて点灯させる(ステップ#41)。次に、その時の眼球像を撮像素子5によって読み込み、A/Dコンバータ6を介してディジタル化して画像信号として内部のRAMに格納する(ステップ#42)。そして、前記画像信号を処理してP像を抽出する(ステップ#43)。
【0030】
P像の抽出の仕方としては、P像は明るく、その出力は急峻であることを利用して、信号が一定レベル以上で、しかも傾きが大きいものをP像と見なす。例えば眼球像が前述の図14であったとする。この眼球像において、P像はaとbであるが、これらを検出する為にP像条件を、信号レベルがL1 (図15参照)以上であり、傾きが一定値以上であるとすると、P像a,bは水平ラインy1 で、図15の様に条件を満たし、それらの位置はL1 を越える部分の重心演算等によってIPa,IPbとして求められる。
【0031】
次に、シーケンスコントローラ1は画像信号を処理して瞳孔エッジを抽出する(ステップ#44)。
【0032】
瞳孔エッジの抽出の仕方としては、瞳孔部分は暗く、虹彩部分がそれよりも明るいことを利用して、信号レベルが一定値レベル(これを図15に示す様にL2 とする)であり、しかも一定期間以上傾きが継続する場合のL2 との交点を瞳孔エッジとみなすものとする。
【0033】
例えば、眼球像が前述の様に図14であった場合の水平ラインy1 における瞳孔エッジは、図15に示すe1 ,e6 が適正な瞳孔エッジとなる。しかしながら、P像a,bの裾野も瞳孔エッジの条件を満たしてしまうので、e2 ,e3 、e4 ,e5 も本当は瞳孔エッジで無いにも拘らず瞳孔エッジとして処理される。従って、これを避ける為に、特開平6−148509号公報において提案されている様に、瞳孔エッジ抽出後、P像周辺の一定領域内にある瞳孔とみなしたエッジを取り除く(ステップ#45)。
【0034】
ここで、このP像周辺の偽エッジ以外にも、まつ毛やその他種々のノイズによって偽エッジが発生する。図17の黒点は、前述した様に検出され得る偽エッジを含めた全てのエッジを表している。これら偽エッジを排除するために、特開平4−347132号公報において提案されている様に、シーケンスコントローラ1は、P像位置情報に基づいて、確からしいエッジの座標範囲を限定する(ステップ#46)。
【0035】
図20はこの「瞳孔指定範囲の設定」を示すサブルーチンである。
【0036】
図20において、2個のP像座標のうち、左側を(IP1 ,JP1 )、右側を(IP2 ,JP2 )として、瞳孔指定範囲を
IS1 ←IP1 −20
IS2 ←IP2 +20
JS1 ←(JP1 +JP2 )/2−40
JS2 ←(JP1 +JP2 )/2+20
に設定する。ここで、IS1 は瞳孔指定範囲の左限,IS2 は右限,JS1 は上限,JS2 は下限を表すものとする。
【0037】
これによれば、設定範囲は画面上で長方形となり、図14に示す様に画像に対して範囲Fのようになる。
【0038】
図20のフローチャート終了後は、図19におけるステップ#47において、「瞳孔指定範囲外の瞳孔エッジの排除」を行う。
【0039】
図21はこの「瞳孔指定範囲外の瞳孔エッジの排除」を示すサブルーチンである。
【0040】
図21において、図19のステップ#44で抽出された瞳孔エッジの内のステップ#45における「P像周辺の瞳孔エッジの排除」後の全てのエッジに対して、「水平方向座標<IS1 」となるエッジ,「水平方向座標>IS2 」となるエッジを排除する(ステップ#71,#72)。そして、残ったエッジに対してさらに「垂直方向座標<JS1 」となるエッジ,「垂直方向座標>JS2 」となるエッジを排除する(ステップ#73,#74)。
【0041】
以上の処理が終ったら、図19のステップ#48で瞳孔中心の検出を行う。ここでは瞳孔部の形状が円形(楕円形も含む)であることを利用して、最小二乗法等を用いて瞳孔中心を求める。この計算の後、計算値の確からしさをチェックするため、求められた瞳孔中心位置と各瞳孔エッジ位置をもとに瞳孔円推定誤差CERの計算を行う(ステップ#50)。計算の方法は、特開平4−347131号公報において提案されている様に、二乗誤差を用いて行う。
【0042】
そして、求められた瞳孔円推定誤差CERに対して確からしいとするしきい値CT 以下かどうかをチャックし(ステップ#51)、しきい値CT 以下ならば求めた瞳孔中心位置とP像位置に基づいて眼球回転角の計算を行い(ステップ#52)、視線検出を終了する。
【0043】
また、上記ステップ#50で瞳孔円推定誤差CERがCT よりも大きかった場合は、瞳孔エッジの中に未だ偽瞳孔エッジ(偽エッジとも記す)が多く含まれていたとして、偽エッジの更なる排除、即ち「瞳孔円修正」(例えば図18)を行い(ステップ#51)、再び瞳孔中心の計算(ステップ#48)に戻る。
【0044】
ところで、瞳孔は円形(若しくは楕円形)であるので、偽エッジ排除のための瞳孔指定範囲も円形もしくは楕円形であるのが望ましい。
【0045】
しかしながら、上記従来例では、上記瞳孔指定範囲が図14の範囲Fの様に、長方形もしくは正方形となっており、e20,e21の様に、瞳孔中心から遠く離れたところの、上記長方形の4隅にある明らかな偽エッジもここで排除しきれないことになる。従って、瞳孔中心の計算を行っても、その後で必ず瞳孔円修正を行わなければならず、演算時間の長時間化につながる。
【0046】
また、その瞳孔円修正に関しても、本来は最も偽エッジである可能性の高いものから抜いていくのが望ましいにもかかわらず、エッジを抜く順番は単に抽出された順のままであり、このままでは効率的な処理であるとはいえない。
【0047】
(発明の目的)
本発明の目的は、偽瞳孔エッジの排除を効率的かつ適正に行い、精度の良いしかも高速処理の視線検出を行うことのできる視線検出装置及び光学機器を提供することにある。
【0048】
【課題を解決するための手段】
上記目的を達成するために、請求項1,3及び9記載の本発明は、観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部の形状を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備え、前記演算手段内に、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からのエッジ毎の距離情報に対する統計的処理を施し、すなわち平均値と標準偏差を用い、不適当なエッジを排除して瞳孔円を算出する瞳孔円算出手段を設けた構成にしている。
【0049】
同じく上記目的を達成するために、請求項2,3及び9記載の本発明は、観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部の形状を円形として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備え、前記演算手段内に、前記複数のエッジを所定の基準に基づいて複数のグループに分けると共に、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からの前記エッジグループ毎の距離情報に対する統計量に基づいたグループ順にエッジを排除して瞳孔円を算出する瞳孔円算出手段を具備した構成にしている。
【0050】
同じく上記目的を達成するために、請求項4及び9記載の本発明は、観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備え、前記演算手段内に、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、前記複数のエッジのうち、前記仮の瞳孔中心位置を中心として描かれる円形状の領域内に含まれるエッジ情報から瞳孔円を算出する瞳孔円算出手段を具備した構成にしている。
【0051】
同じく上記目的を達成するために、請求項5〜9記載の本発明は、観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備え、前記演算手段内に、算出した瞳孔円の信頼性が低い場合は、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、前記複数のエッジの中より、該仮の瞳孔中心位置からのエッジ毎の距離情報に基づいた順にエッジを排除して瞳孔円を算出する瞳孔円算出手段を具備した構成にしている。
【0052】
具体的には、前記瞳孔円算出手段は、前記複数のエッジの中より、前記仮の瞳孔中心位置との距離の遠い順にエッジを排除したり、前記仮の瞳孔中心位置からの各エッジまでの距離の平均値との差に基づいてエッジを排除して、瞳孔円を算出するようにしている。
【0053】
【発明の実施の形態】
以下、本発明を図示の実施の形態に基づいて詳細に説明する。
【0054】
図1及び図2は本発明の実施の第1の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図13のステップ#7の「統計量による排除」及びステップ#11の「瞳孔円修正」以外の処理は、該図13と同様であるので、ここではその詳細は省略する。
【0055】
まず、図1のフローチャートにより、「統計量による排除」の動作について説明する。
【0056】
瞳孔は円形であるので、正しいエッジは円形にばらついている筈であり、エッジの統計量による排除も円形を前提として処理すべきである。よって、検出されたP像位置をもとに仮の瞳孔中心位置を推定し、そこからのエッジ毎の距離を処理情報として統計量の計算を行うものとする。
【0057】
図1において、シーケンスコントローラ1は、まず、P像の位置をもとに仮の瞳孔中心位置C0 を決める。2個のP像座標のうち、左側を(IP1 ,JP1 )、右側を(IP2 ,JP 2 )として、仮の瞳孔中心位置C0 の座標(IC・JC)を
IC←(IP1 +IP2 )/2
JC←(JP1 +JP2 )/2−10
とする(ステップ#101)。
【0058】
次に、エッジ毎に瞳孔中心位置C0 との距離を求める(ステップ#102)。例えば、あるエッジの座標が(IE1 ,JE1 )であったとすると、求める距離EC1 は
EC1 =√〔(IC−IE1 )2 +(JC−JE1 )2 〕 …(1)
となる。
【0059】
次に、求めた距離情報のうち、左エッジグループの瞳孔中心位置C0 との距離の平均値mLF1 及び標準偏差σLF1 を求める(ステップ#103)。そして、左エッジのうちで
C0 との距離>mLF1 +σLF1
または
C0 との距離<mLF1 −σLF1
であるエッジを排除する(ステップ#104)。
【0060】
次に、右エッジグループの瞳孔中心位置C0 との距離の平均値mRF1 及び標準偏差σRF1 を求める(ステップ#105)。そして、右エッジのうちで
C0 との距離>mRF1 +σRF1
または
C0 との距離<mRF1 −σRF1
であるエッジを排除する(ステップ#106)。
【0061】
この様にすれば、円形を前提としてエッジを排除できる。例えば、抽出された左エッジが図3における黒点(図14の黒点位置と同じ)に示す様に存在しており、P像から求められる仮の瞳孔中心位置C0 が図3中に示す様に、半径re61の円の中心に位置していたとすれば、上記の統計量の計算により、偽エッジe5 1 は従来例と同様に排除され、正しいエッジe61,e62は従来では排除されていたのが、この実施の形態では排除されないで残ることになる。
【0062】
この様に本実施の形態により、従来に比べ正しいエッジを多く残すことができる。
【0063】
ここで、この後の図13のステップ#11「瞳孔円修正」において、左エッジと右エッジで上記統計量の計算で求めた標準偏差の大きいエッジグループを、偽エッジを多く含むグループであるとして先にエッジを抜いていくようにすれば、円修正をより効率的に行うことが出来る。
【0064】
この「瞳孔円修正」について、図2のフローチャートにより説明する。
【0065】
図2において、シーケンスコントローラ1は、まずこの瞳孔円修正が1回目(初めての修正)かどうかをチェックする(ステップ#201)。1回目ならば、図1のステップ#103,#105で求められた左エッジ及び右エッジの標準偏差σLF1 ,σRF1 を比較し、大きい方を偽エッジを多く含むグループとして先にエッジ抜きを行うように順序を入れ換える(ステップ#202)。その後、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#204)、エッジを並び順に1個抜く(ステップ#206)。ここでは1回目のエッジ抜きなので、上記標準偏差の大きいグループの最初に存在するエッジとなる。
【0066】
上記ステップ#201で瞳孔円修正が1回目でなかった場合、即ち1回目もしくは2回目以降の円修正後、図13のステップ#8に戻り、その後再度ステップ#10で瞳孔円推定誤差CERがしきい値CT 以下でなく、再びステップ#11で「瞳孔円修正」を行う場合、求めた最新の瞳孔円推定誤差CERがエッジを抜く前の瞳孔円推定誤差CER、即ちCER0 よりも小さくなっている(これは抜いたエッジが偽エッジであり、真円に近づいていることを意味する)かどうかをチェックする(ステップ#203)。ここで、「CER<CER0 」でなければ、抜いたエッジは偽エッジでなかったとしてもとに戻し(ステップ#205)、並び順に次のエッジを抜く(ステップ#206)。
【0067】
また、上記ステップ#203において、「CER<CER0 」であった場合は、抜いたエッジはそのままにして、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#204)、並び順に次のエッジを抜く(ステップ#206)。
【0068】
なお、この実施の形態では、統計量によって排除される偽エッジを含んだままの標準偏差値を比較しているが、「統計量による排除」を行った後で残ったエッジに対して再度標準偏差を計算し、その値を比較してもよい。
【0069】
(実施の第2の形態)
上記実施の第1の形態では、前述の(1)式の様にして平方根をとって、仮の瞳孔中心位置C0 (IC,JC)からの距離を算出しているが、演算上,平方根の計算は時間がかかるものである。
【0070】
一方、上記距離情報は符号が正なので、その大小関係は(距離)2 と同じである。よって、平方根をとらず(距離)2 のままで平均値や標準偏差の演算を行えば、全体の演算時間短縮につながり、かつ、上記実施の第1の形態と同様の効果を持つ。これを本発明の実施の第2の形態として、以下に説明する。
【0071】
図4は本発明の実施の第2の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図13のステップ#7の「統計量による排除」以外の処理は、該図13と同様であるので、ここではその詳細は省略する。
【0072】
図4において、シーケンスコントローラ1は、まず、P像の位置をもとに仮の瞳孔中心位置C0 を決める。2個のP像座標のうち、左側を(IP1 ,JP1 )、右側を(IP2 ,JP2 )として、仮の瞳孔中心位置C0 の座標(IC,JC)を
IC←(IP1 +IP2 )/2
JC←(JP1 +JP2 )/2−10
とする(ステップ#301)。
【0073】
次に、エッジ毎に(瞳孔中心位置C0 との距離)2 を求める(ステップ#302)。算出方法は、あるエッジの座標が(IE1 ,JE1 )であったとすると、求める値EC1 ’は
EC1 ’=(IC−IE1 )2 +(JC−JE1 )2 ………(2)
の様にして求められる。
【0074】
次に、求めた(瞳孔中心位置C0 との距離)2 のうち、左エッジグループの(瞳孔中心位置C0 との距離)2 の平均値mLF2 及び標準偏差σLF2 を求める(ステップ#303)。そして、左エッジのうちで
(C0 との距離)2 >mLF2 +σLF2
または
(C0 との距離)2 <mLF2 −σLF2
であるエッジを排除する(ステップ#304)。
【0075】
次に、右エッジグループの(瞳孔中心位置C0 との距離)2 の平均値mRF2 及び標準偏差σRF2 を求める(ステップ#305)。そして、右エッジのうちで
(C0 との距離)2 >mRF2 +σRF2
または
(C0 との距離)2 <mRF2 −σRF2
であるエッジを排除する(ステップ#306)。
【0076】
(実施の第3の形態)
上記実施の第1及び第2の形態では、「統計量による排除」は左エッジと右エッジ別々に行っているが、エッジ全体に対してこれを行う方法も考えられる。これを本発明の実施の第3の形態として、以下に説明する。
【0077】
図5は本発明の実施の第3の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図13のステップ#7の「統計量による排除」以外の処理は、該図13と同様であるので、ここではその詳細は省略する。
【0078】
図5において、シーケンスコントローラ1は、まず、P像の位置をもとに仮の瞳孔中心位置C0 を決める。2個のP像座標のうち、左側を(IP1 ,JP1 )、右側を(IP2 ,JP2 )として、仮の瞳孔中心位置C0 の座標(IC,JC)を
IC←(IP1 +IP2 )/2
JC←(JP1 +JP2 )/2−10
とする(ステップ#401)。
【0079】
次に、エッジ毎に瞳孔中心位置C0 との距離を求める(ステップ#402)。求め方は、上記実施の第1の形態と同様であるとする。次に、エッジ全体の瞳孔中心位置C0 との距離の平均値mF及び標準偏差σFを求める(ステップ#403)。そして、全エッジのうちで
C0 との距離>mF+σF
または
C0 との距離<mF−σF
であるエッジを排除する(ステップ#404)。
【0080】
上記の実施の第1〜第3の形態によれば、検出されたP像の位置を基にして仮の瞳孔中心位置C0 を設定し、ここから各瞳孔エッジに対する距離情報を求め、求めた各距離情報に対する統計的処理を施すことによって偽エッジを排除するようにした為、正しいエッジが円形(若しくは楕円形)に存在することを前提とした排除となり、排除されるエッジが偽エッジのみとなる可能性が高くなり、従来に比べてより効果的なエッジ排除が行うことができるようになった。
【0081】
また、瞳孔中心演算後の瞳孔円修正において、左エッジと右エッジで上記統計量の計算で求めた標準偏差の大きいエッジグループを、偽エッジを多く含むグループであるとして先にエッジを抜いていくようにしたので、瞳孔円修正をより効果的に行うことが出来、演算時間の短縮および視線検出成功率アップを達成できた。
【0082】
なお、上記の実施の各形態では、複数のエッジを右エッジと左エッジに分けているが、仮の瞳孔中心位置C0 から遠い方のグループと近いグループに分けたり、上エッジ,下エッジに分けたり、或いは、撮像素子面の上半分,下半分に、又は右半分,左半分等、複数のグループに分けることも可能である。
【0083】
(実施の第4の形態)
図6は本発明の実施の第4の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図19のステップ#46の「瞳孔指定範囲の設定」,ステップ#47の「瞳孔指定範囲外の瞳孔エッジの排除」,ステップ#51の「瞳孔円修正」以外の処理は、該図19と同様であるので、ここではその詳細は省略する。
【0084】
図6において、システムコントローラ1は、まずP像の位置を基に仮の瞳孔中心位置を決める。2個のP像座標のうち、左側を(IP1 ,JP1 )、右側を(IP2 ,JP2 )として、仮の瞳孔中心位置座標(IC,JC)を
IC←(IP1 +IP2 )/2
JC←(JP1 +JP2 )/2−10
とする(ステップ#501)。
【0085】
次に、上記の仮の瞳孔中心位置を中心とした円形の領域が瞳孔指定範囲となる様に、その半径Rを20に設定する(ステップ#502)。
【0086】
上記の半径Rは、ここでは固定値にしたが、P像間隔から求められている像倍率を基にした計算式により求めることもできる。この半径Rを決めた後、図19のステップ#47へリターンする。
【0087】
図7は図14と同じ眼球像に対して、本実施の形態の瞳孔指定範囲を当てはめたものである。
【0088】
図8は、本発明の実施の第4の形態において、図19のステップ#47に進んだ際に実行される「瞳孔指定範囲外の瞳孔エッジの排除」の動作を示すフローチャートである。
【0089】
図8において、シーケンスコントローラ1は、まずエッジ毎に仮の瞳孔中心位置座標(IC,JC)からの距離を算出する(ステップ#601)。例えば、あるエッジの座標が(IE1 ,JE1 )であったとすると、求める距離EC1 は
EC1 =√〔(IC−IE1 )2 +(JC−JE1 )2 〕 …(3)
となる。求めた各エッジの距離は瞳孔指定範囲の半径Rと比較して
距離>R
となるエッジを偽エッジとして排除して(ステップ#602)、図19のステップ#48へリターンする。
【0090】
これより、図7においては、e20,e21など、従来(図14)に比べて全部で8個余計に偽エッジを排除することができる。
【0091】
図9は、本発明の実施の第4の形態において、図19のステップ#51に進んだ際に実行される「瞳孔円修正」の動作を示すフローチャートである。
【0092】
図3を見ても分かるように、偽エッジはまつ毛や眼鏡ゴースト等によるものが殆どであり、その位置は通常、瞳孔円の外側に存在する。よって、瞳孔中心位置から離れているエッジほど偽エッジである可能性が高いと考えて良い。これを利用して、前記の仮の瞳孔中心位置(本当の瞳孔中心位置に近いはず)を用いて、この座標との距離の遠い順に瞳孔エッジを抜いていけば瞳孔円修正、すなわち偽エッジ抜きが効率的に行われる。
【0093】
図9において、シーケンスコントローラ1は、まずこの瞳孔円修正が1回目(初めての修正)かどうかをチェックする(ステップ#701)。1回目ならば、エッジ毎に仮の瞳孔中心位置座標(IC,JC)からの距離を算出し値の大きい(すなわち遠い)順に並べ換える。
【0094】
ここで、もしエッジが抽出条件によって右方向エッジグループ,左方向エッジグループ等、複数のグループに分けられている場合は、その各グループ内でのみの順番の並べ換えでもよい。
【0095】
その後、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#704)、エッジを並び順に1個抜く(ステップ#706)。ここでは1回目のエッジ抜きになるので、座標(IC,JC)から一番遠いエッジを抜くことになる。
【0096】
また、上記ステップ#701で瞳孔円修正が1回目でなかった場合、すなわち1回目もしくは2回目以降の円修正後、図19のステップ#48に戻り、その後再度ステップ#51で瞳孔円推定誤差CERがしきい値CT 以下でなく、再びステップ#51で「瞳孔円修正」を行う場合、求めた最新の瞳孔円推定誤差CERがエッジを抜く前の瞳孔円推定誤差CER、すなわちCER0 よりも小さくなっている(これは抜いたエッジが偽エッジであり、真円に近づいていることを意味する)かどうかをチェックする(ステップ#703)。ここで、「CER<CER0 」でなければ抜いたエッジは偽エッジでなかったとしてもとに戻し(ステップ#705)、並び順に次のエッジを抜く(ステップ#706)。
【0097】
また、上記#703において、「CER<CER0 」であった場合は、抜いたエッジは抜いたままにして、瞳孔円推定誤差CERをCER0 として退避させ(ステップ#704)、並び順に次のエッジを抜く(ステップ#706)。
【0098】
なお、上記の実施の形態では、仮の瞳孔中心位置を中心とした円形の領域が瞳孔指定範囲となる様に、その半径Rを20に設定する例を示しているが、これに限定されるものではなく、例えば仮の瞳孔中心位置からのエッジ毎の距離の平均距離を、又は該平均距離との各エッジ差を基に、半径Rを設定する様にしてもよい。
【0099】
この実施の第4の形態によれば、P像位置を用いて仮の瞳孔中心位置を推定し、ここからの距離によって決められる円形の領域を偽エッジ排除のための瞳孔指定範囲としたので、従来に比べ、偽エッジをより多くより確実に排除することができる。
【0100】
また、瞳孔円修正においても、仮の瞳孔中心位置(本当の瞳孔中心位置に近いはず)から離れているエッジほど偽エッジである可能性が高いとみなして、ここから距離の遠い順に瞳孔エッジを抜いていくようにしたので、従来に比べ円修正を効率的に行えるようになった。
【0101】
(実施の第5の形態)
上記実施の第4の形態では、図19のステップ#51へ進んだ際に実行される「瞳孔円修正」において、仮の瞳孔中心位置座標(IC,JC)からの距離を算出してエッジの並べ換えを行っているが、ステップ#47の「瞳孔指定範囲外の瞳孔エッジの排除」において、既に(IC,JC)からの距離を算出しているので、このサブルーチン内でエッジの並べ換えを済ませておけば、「瞳孔円修正」が行われる場合に限って、距離の算出に要する時間を半分に減らすことができる。これを本発明の実施の第5の形態として、以下に説明する。
【0102】
図10は本発明の実施の第5の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図19のステップ#51の「瞳孔円修正」以外の処理は、該図19と同様であるので、ここではその詳細は省略する。
【0103】
図10において、シーケンスコントローラ1は、まずエッジ毎に仮の瞳孔中心位置座標(IC,JC)からの距離を算出する(ステップ#801)。算出方法は、上記実施の第1の形態と同じであるとする。
【0104】
求められた各エッジの距離は瞳孔指定範囲の半径Rと比較して
距離>R
となるエッジを偽エッジとして排除する(ステップ#801)。そして、排除されなかった残りのエッジに対してここで上記距離の遠い順に並べ換えておき(ステップ#803)、図19のステップ#48へリターンする。
【0105】
(実施の第6の形態)
上記実施の第4及び第5の形態では、いずれも上記(3)のようにして平方根をとって座標(IC,JC)からの距離を算出しているが、演算上、平方根の計算は時間がかかるものである。一方、上記距離情報は符号が正なので、その大小関係は(距離)2 と同じである。よって、平方根をとらず(距離)2 のままで半径R等との比較や並べ換えを行えば、全体の演算時間短縮につながり、かつ、上記実施の各形態と効果は同様となる。これを本発明の実施の第6の形態として、以下に説明する。
【0106】
図11は本発明の実施の第6の形態に係る視線検出装置の主要部分の動作を示すフローチャートである。なお、該視線検出装置の電気的構成は、上記図12と同様であり、又該視線検出装置の一連の動作は、図19のステップ#45の「瞳孔指定範囲の設定」は上記実施の第4の形態と同様(図6)であり、図19のステップ#47の「瞳孔指定範囲の瞳孔エッジの排除」以下の図11に示す通りである。その他の動作は図19と同様であるので、その詳細は省略する。
【0107】
図11において、シーケンスコントローラ1は、まずエッジ毎に仮の瞳孔中心位置座標(IC,JC)からの距離の二乗を算出する(ステップ#901)。算出方法は、あるエッジの座標が(IE1 ,JE1 )であったとすると、求める距離の二乗のEC1 ’は
EC1 ’=(IC−IE1 )2 +(JC−JE1 )2 ……(4)
のようにして求められる。
【0108】
求められた各エッジの(距離)2 と瞳孔指定範囲の半径Rを用いて
(距離)2 >R2
となるエッジを偽エッジとして排除する(ステップ#902)。そして、排除されなかった残りのエッジに対してここで上記(距離)2 の大きい順に並べ換えておき(ステップ#903)、図19のステップ#48へリターンする。
【0109】
上記実施の第4〜第6の実態によれば、P像位置を用いて仮の瞳孔中心位置を推定し、ここからの距離によって決められる円形(若しくは楕円形)の領域を偽エッジ排除のための瞳孔指定範囲とした為、従来に比べ、偽エッジをより多くより確実に排除することができる。
【0110】
また、瞳孔中心の検出後の推定円修正においても、上記仮の瞳孔中心位置から離れているエッジほど偽エッジである可能性が高いとみなして、距離の遠い順に瞳孔エッジを抜いていくようにしたので、従来に比べ上記の瞳孔円修正を効率的に行えるようになった。
【0111】
(発明と実施の形態の対応)
上記実施の各形態において、IRED2,3及びIREDドライバ4が本発明の照明手段に、撮像素子5が本発明の受光手段に、シーケンスコントローラ1が演算手段,瞳孔円算出手段に、それぞれ相当する。また、請求項1等に記載の円形状とは、円形のみならず、楕円形を含むものである。
【0112】
以上が実施の形態の各構成と本発明の各構成の対応関係であるが、本発明は、これら実施の形態の構成に限定されるものではなく、請求項で示した機能、又は実施の形態がもつ機能が達成できる構成であればどのようなものであってもよいことは言うまでもない。
【0113】
(変形例)
本発明は、銀塩カメラやビデオカメラ、更には電子スチルカメラ等、各種のカメラに適用できるものである。さらには、ディスプレイを有する機器や操作パネルを有する機器(ディスプレイや操作パネルを注視するオペレータ等の視線検出に用いることが可能なため)等にも適用可能である。その他の光学機器や他の装置、更には構成ユニットとしても適用することができるものである。
【0114】
また、本発明は、以上の実施の各形態、又はそれらの技術を適当に組み合わせた構成にしてもよい。具体的には、実施の第1〜第3の実施の形態の特徴とする処理を施した後に、実施の第4〜第6の形態の特徴とする処理を行うような視線検出装置とすることにより、より効果的に偽エッジの排除を行うことが可能となる。
【0115】
【発明の効果】
以上説明したように、本発明によれば、複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からのエッジ毎の距離情報に対する統計的処理を施し、すなわち平均値と標準偏差を用い、不適当なエッジを排除して瞳孔円を算出したり、
複数のエッジを所定の基準に基づいて複数のグループに分けると共に、複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からの前記エッジグループ毎の距離情報に対する統計量(例えば、標準偏差)に基づいたグループ順にエッジを排除して瞳孔円を算出したり、
複数の角膜反射像の位置から仮の瞳孔中心位置を求め、複数のエッジのうち、該仮の瞳孔中心位置を中心として描かれる円形状の領域内に含まれるエッジ情報から瞳孔円を算出したり、
算出した瞳孔円の信頼性が低い場合は、複数の角膜反射像の位置から仮の瞳孔中心位置を求め、複数のエッジの中より、該仮の瞳孔中心位置からのエッジ毎の距離情報に基づいた順にエッジを排除して瞳孔円を算出するようにしている。
【0116】
よって、偽瞳孔エッジの排除を効率的かつ適正に行い、精度の良いしかも高速処理の視線検出を行うことが可能になる。
【図面の簡単な説明】
【図1】本発明の実施の第1の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図2】同じく本発明の実施の第2の形態に係る視線検出装置の瞳孔円修正の動作を示すフローチャートである。
【図3】図2の動作を助ける為の瞳孔円及び複数のエッジを示す図である。
【図4】本発明の実施の第2の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図5】本発明の実施の第3の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図6】本発明の実施の第4の形態に係る視線検出装置の瞳孔指定範囲の設定の動作を示すフローチャートである。
【図7】図6の動作を助ける為の瞳孔円及び複数のエッジを示す図である。
【図8】本発明の実施の第4の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図9】同じく本発明の実施の第4の形態に係る視線検出装置の瞳孔円修正の動作を示すフローチャートである。
【図10】本発明の実施の第5の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図11】本発明の実施の第6の形態に係る視線検出装置の統計量による排除の動作を示すフローチャートである。
【図12】本発明及び従来の視線検出装置の電気的構成の要部を示すブロック図である。
【図13】図12の視線検出装置の一連の動作を示すフローチャートである。
【図14】図12の撮像素子に投影される眼球像を示す図である。
【図15】図14に示した撮像素子上のP像が存在するラインの画像出力及び瞳孔エッジの抽出について説明する為の図である。
【図16】従来の第1の視線検出装置の統計量による排除の動作を示すフローチャートである。
【図17】図16の動作をエッジ排除について説明する為の図である。
【図18】
同じく従来の第1の視線検出装置の瞳孔円修正の動作を示すフローチャートである。
【図19】従来の第2の視線検出装置の一連の動作を示すフローチャートである。
【図20】同じく従来の第2の視線検出装置の瞳孔指定範囲の設定の動作を示すフローチャートである。
【図21】同じく従来の第2の視線検出装置の瞳孔指定範囲外の瞳孔エッジの排除の動作を示すフローチャートである。
【符号の説明】
1 シーケンスコントローラ
2,3 IRED
4 IREDドライバ
5 撮像素子
Claims (9)
- 観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部の形状を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備えた視線検出装置において、
前記演算手段は、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からのエッジ毎の距離情報に対する統計的処理を施し、不適当なエッジを排除して瞳孔円を算出する瞳孔円算出手段を有することを特徴とする視線検出装置。 - 観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部の形状を円形として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備えた視線検出装置において、
前記演算手段は、前記複数のエッジを所定の基準に基づいて複数のグループに分けると共に、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、該仮の瞳孔中心位置からの前記エッジグループ毎の距離情報に対する統計量に基づいたグループ順にエッジを排除して瞳孔円を算出する瞳孔円算出手段を有することを特徴とする視線検出装置。 - 前記統計的処理とは、仮の瞳孔中心位置からのエッジ毎の距離情報に対する平均値と標準偏差であることを特徴とする請求項1記載の視線検出装置。
- 観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備えた視線検出装置において、
前記演算手段は、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、前記複数のエッジのうち、前記仮の瞳孔中心位置を中心として描かれる円形状の領域内に含まれるエッジ情報から瞳孔円を算出する瞳孔円算出手段を有していることを特徴とする視線検出装置。 - 観察者の眼球を照明する複数の照明手段と、該照明手段による観察者の眼球からの反射光を受光する受光手段と、該受光手段で得られた画像信号に基づいて、眼球像中の瞳孔エッジとみなせるエッジと前記照明手段による複数の角膜反射像の位置を抽出する抽出手段と、前記抽出された複数の角膜反射像と複数のエッジ情報から瞳孔部を円形状として扱って瞳孔円を算出し、この瞳孔円より瞳孔中心を求め、該瞳孔中心と前記複数の角膜反射像の位置より観察者の視線を検出する演算手段とを備えた視線検出装置において、
前記演算手段は、算出した瞳孔円の信頼性が低い場合は、前記複数の角膜反射像の位置から仮の瞳孔中心位置を求め、前記複数のエッジの中より、該仮の瞳孔中心位置からのエッジ毎の距離情報に基づいた順にエッジを排除して瞳孔円を算出する瞳孔円算出手段を有することを特徴とする視線検出装置。 - 前記瞳孔円算出手段は、前記複数のエッジの中より、前記仮の瞳孔中心位置との距離の遠い順にエッジを排除して瞳孔円を算出することを特徴とする請求項5記載の視線検出装置。
- 前記瞳孔円算出手段は、前記複数のエッジの中より、前記仮の瞳孔中心位置からの各エッジまでの距離の平均値との差に基づいてエッジを排除して瞳孔円を算出することを特徴とする請求項5記載の視線検出装置。
- 前記瞳孔円算出手段は、前記複数のエッジの中より、前記仮の瞳孔中心位置からの各エッジまでの距離の平均値との差の大きい順にエッジを排除して瞳孔円を算出することを特徴とする請求項7記載の視線検出装置。
- 請求項1,2,4又は5記載の視線検出装置を具備したことを特徴とする光学機器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27992596A JP3630880B2 (ja) | 1996-10-02 | 1996-10-02 | 視線検出装置及び光学機器 |
| US08/941,378 US6036316A (en) | 1996-10-02 | 1997-09-30 | Visual axis detecting device and apparatus including visual axis detecting device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27992596A JP3630880B2 (ja) | 1996-10-02 | 1996-10-02 | 視線検出装置及び光学機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPH1099279A JPH1099279A (ja) | 1998-04-21 |
| JPH1099279A5 JPH1099279A5 (ja) | 2004-10-07 |
| JP3630880B2 true JP3630880B2 (ja) | 2005-03-23 |
Family
ID=17617828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP27992596A Expired - Fee Related JP3630880B2 (ja) | 1996-10-02 | 1996-10-02 | 視線検出装置及び光学機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3630880B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3659937B2 (ja) | 2001-07-10 | 2005-06-15 | 参天製薬株式会社 | サルの視野測定システム及び視野測定方法 |
| SG181539A1 (en) | 2009-12-07 | 2012-07-30 | Hiok Nam Tay | Auto-focus image system |
| JP5277153B2 (ja) * | 2009-12-24 | 2013-08-28 | 本田技研工業株式会社 | 画像処理装置、画像処理方法および画像処理プログラム |
| SG185345A1 (en) * | 2010-05-26 | 2012-12-28 | Hiok Nam Tay | Auto-focus image system |
| JP5643662B2 (ja) * | 2011-01-17 | 2014-12-17 | 株式会社トプコン | 眼科装置 |
| US9065999B2 (en) | 2011-03-24 | 2015-06-23 | Hiok Nam Tay | Method and apparatus for evaluating sharpness of image |
| CN119344950B (zh) * | 2024-09-26 | 2025-09-26 | 南开大学 | 一种飞秒激光屈光手术切削中心定位方法及设备 |
-
1996
- 1996-10-02 JP JP27992596A patent/JP3630880B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1099279A (ja) | 1998-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3259734B1 (en) | Glare reduction | |
| JP4004634B2 (ja) | 顔映像の目位置検出装置及び方法 | |
| EP3809692B1 (en) | Imaging device provided with event-based camera | |
| WO2004077376A2 (en) | Lane tracking system employing redundant image sensing devices | |
| CN113190115B (zh) | 眼球追踪方法及虚拟现实设备 | |
| CN104021382A (zh) | 一种眼部图像采集方法及其系统 | |
| JP3630880B2 (ja) | 視線検出装置及び光学機器 | |
| CN108062763A (zh) | 目标跟踪方法及装置、存储介质 | |
| CN118614863B (zh) | 裂隙灯设备的虹膜对焦方法、装置、电子设备和存储介质 | |
| US5815240A (en) | Ophthalmologic device having means for classifying the picture data in the frame memory into the bright point regions and the mask regions | |
| US6036316A (en) | Visual axis detecting device and apparatus including visual axis detecting device | |
| US10176375B2 (en) | High speed pupil detection system and method | |
| JP3726122B2 (ja) | 視線検出システム | |
| US12367710B2 (en) | Line-of-sight detection device and control method for controlling the same | |
| EP0554080A1 (en) | Transient event rejection for acquisition and tracking | |
| JPH1099278A (ja) | 視線検出装置及び光学機器 | |
| JP3178747B2 (ja) | 視線検出装置 | |
| JP3219426B2 (ja) | 視線検出装置 | |
| CN106210529B (zh) | 移动终端的拍摄方法以及装置 | |
| JP2002006203A (ja) | 合焦装置及び撮像装置 | |
| JPH06254053A (ja) | 視線検出装置 | |
| JP3256294B2 (ja) | 視線検出装置および視線検出方法 | |
| US20240377883A1 (en) | Display device, control method and non-transitory computer readable medium | |
| CN118799316B (zh) | 极耳检测方法、装置、电子设备、成像系统及存储介质 | |
| CN115567766B (zh) | 立杆摄像机、图像处理方法、装置及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041214 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041215 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081224 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081224 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091224 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091224 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101224 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111224 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |