JP3641027B2 - 電動式パワーステアリング装置 - Google Patents
電動式パワーステアリング装置 Download PDFInfo
- Publication number
- JP3641027B2 JP3641027B2 JP21958495A JP21958495A JP3641027B2 JP 3641027 B2 JP3641027 B2 JP 3641027B2 JP 21958495 A JP21958495 A JP 21958495A JP 21958495 A JP21958495 A JP 21958495A JP 3641027 B2 JP3641027 B2 JP 3641027B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- alternator
- voltage
- pulsation
- pass filter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Power Steering Mechanism (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
【0001】
【発明の属する技術分野】
この発明は、オルタネータの脈動周波数からエンジン回転数を算出する電動式パワーステアリング装置に関する。
【0002】
【従来の技術】
図5、6に示す従来例の電動パワーステリング装置では、アシスト力を付与するための電動モータmが、コントローラーCを介して、バッテリBに接続している。
上記バッテリBには、オルタネータ1を接続している。オルタネータ1は、図示しないエンジンに連動して駆動し、交流電圧を発電する。そして、この交流電圧を整流して、バッテリBに蓄電させるものである。
このオルタネータ1には、オルタネータの1の発電量を調節するレギュレータ1aが組み込まれている。つまり、バッテリ電圧が上昇すると、レギュレータ1aがオルタネータ1の発電を停止させ、反対に、バッテリ電圧が降下すると、レギュレータ1aがオルタネータ1に発電を開始させる。このようにしてレギュレータ1aがオルタネータ1をオン・オフ調整し、バッテリBの蓄電量を一定に保っている。
【0003】
また、上記コントローラーCは、電動モータmを制御するためのもので、電動モータmに電圧を印加する駆動回路2、この駆動回路2をPWM制御する制御回路3、及びコントローラーCに電源電圧を印加する電源回路4などから構成されている。
上記駆動回路2は、主にモータ駆動素子から構成されている。そして、これらモータ駆動素子は、車両の走行状態に応じて制御回路3によりPWM制御され、電動モータmを正転あるいは逆転させる。このようにして電動モータmが駆動すると、その出力が図示しない操舵機構に伝えられ、操舵をアシストすることになる。
【0004】
さらに、このコントローラーCには、オルタネータ脈動検出回路5を設けている。そして、次のようにして、エンジン回転数Nを算出している。
電動式パワーステアリング装置の電源電圧Vには、オルタネータ1の発電交流電圧を整流した電圧が重畳している。
ここで、オルタネータ1はエンジンにより駆動するため、オルタネータ1の発電した交流電圧は、エンジン回転Nの脈動に比例した脈動周波数を有する。したがって、この交流電圧を整流した電圧の脈動周波数も、エンジン回転数Nに比例することになる。
つまり、図6に示すように、電源電圧Vは、オルタネータ1の脈動周波数と同じ脈動周波数を有することになる。したがって、この電源電圧Vの脈動周波数をオルタネータ脈動検出回路5で検出すれば、オルタネータ1の脈動周波数Fを知ることができる。そして、オルタネータの脈動周波数Fを知ることができれば、エンジン回転数Nを算出できる。
【0005】
このようにしてエンジン回転数Nを算出できれば、例えば、制御回路3が電源回路4を制御し、必要なときにだけコントローラーCに主電源を印加させることができる。つまり、算出したエンジン回転数Nが設定値よりも大きければ、制御回路3が電源回路4を動作させて、主電圧をコントローラーCに印加させる。それに対し、エンジン回転数Nが設定値以下であれば、制御回路3はシステムを起動する必要が無いと判断し、電源回路4を動作させて、バックアップ電圧のみをコントローラーCに印加させる。
このようにすれば、コントローラーCのオン・オフを、外部のイグニションスイッチIGに連動させる必要がなくなり、外部配線を少なくできる。そして、外部配線を少なくできれば、それだけ電動式パワーステアリング装置のコストダウン及び小型化が可能となる。
また、エンジン回転数Nは車速とほぼ比例するので、エンジン回転数Nが分かれば、車速を推定することもできる。したがって、車速を検出する必要な場合にも、車速センサを設ける必要がなく、コストダウン及び小型化が可能となる。
【0006】
【発明が解決しようとする課題】
しかしながら、上記従来例における電動式パワーステアリング装置では、エンジン回転数Nを正確に算出できないことがあった。
その第1の理由は、オルタネータ1がレギュレータ1aによりオン・オフ調整されているからである。つまり、このオン・オフが繰り返されると、オルタネータ1が発電・停止を繰り返し、その電圧変動が電源電圧Vに重畳してしまう。そのため、電源電圧Vの脈動周波数に、オン・オフによる電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
第2の理由は、駆動回路5のモータ駆動素子が、制御回路3によりPWM制御されているからである。つまり、モータ駆動素子がPWM制御されると、その電圧変動が電源電圧Vにも重畳してしまう。そのため、電源電圧Vの脈動周波数に、PWM制御による電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
【0007】
第3の理由は、バッテリBには、この電動式パワーステアリング装置以外にも、他の電気負荷6を接続しているからである。つまり、例えば、他の電気負荷6を停止・起動させると電圧変動が生じてしまい、その電圧変動が電源電圧Vに重畳してしまう。そのため、電源電圧Vの脈動周波数に、他の電気負荷6で発生した電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
この発明の目的は、正確にオルタネータの脈動周波数を検出し、正確なエンジン回転数を算出できる電動式パワーステアリング装置を提供することである。
【0008】
【課題を解決するための手段】
この発明は、操舵アシスト力を付与する電動モータと、電動モータを制御するコントローラーと、コントローラーに接続したバッテリと、エンジンに連係するオルタネータと、このオルタネータを調整するレギュレータとを備え、しかも、上記コントローラーは、電動モータに電圧を印加する駆動回路と、電源電圧の脈動周波数からオルタネータの脈動周波数を検出するオルタネータ脈動検出回路と、駆動回路をPWM制御する一方、オルタネータの脈動周波数からエンジン回転数を算出する制御回路とからなる電動式パワーステアリング装置を前提とする。
そして、第1の発明は、所定の周波数範囲における脈動電圧のみをオルタネータ脈動検出回路に伝えるフィルターを設け、フィルターは、設定した周波数よりも高い周波数の脈動電圧を伝えるハイパスフィルターと、設定した周波数よりも低い周波数の脈動電圧を伝えるローパスフィルターとからなり、しかも、レギュレータの調整による電圧変動の脈動周波数をハイパスフィルターの設定周波数よりも低く、また、PWM制御による電圧変動の脈動周波数をローパスフィルターの設定周波数よりも高くした点に特徴を有する。
【0009】
このような構成にしたので、電源電圧の脈動周波数のうち、設定した範囲の外にある脈動電圧はフィルターにより減衰させることができる。特に、オルタネータのオン・オフ調整による脈動電圧や、PWM制御による脈動電圧を減衰させることができる。
つまり、レギュレータのオン・オフ調整による電圧変動の脈動周波数は、オルタネータの脈動周波数よりも低くしているので、その脈動電圧をハイパスフィルターにより減衰させることができる。なお、この脈動周波数は、オルタネータの特性、例えばオルタネータの極数等を変更したり、レギュレータやバッテリの特性を変更したりすることで、ある程度任意に設定できる。
それに対し、駆動回路のPWM制御による電圧変動の脈動周波数は、オルタネータの脈動周波数よりも高くしているので、その脈動電圧をローパスフィルターにより減衰させることができる。なお、この脈動周波数は、駆動回路の設計などにより、ある程度任意に設定できる。
もちろん、これら以外にも、設定範囲外にある周波数を有する脈動電圧を減衰させられるので、例えば、他の電気負荷による電圧変動の脈動周波数による影響を小さくすることができる。
【0010】
第2の発明は、第1の発明において、フィルターを通過した脈動電圧を所定の基準電圧と比較し、矩形波に変換するコンパレータを設け、オルタネータ脈動検出回路は、この矩形波の周期から、オルタネータの脈動周波数を検出する構成とした点に特徴を有する。
このような構成にしたので、矩形波に変換してから周波数を検出でき、容易に、しかも、正確に周波数を測定できる。
また、基準電圧の設定しだいでは、細かなノイズによる影響をなくすことができる。例えば、電源電圧を、高い基準電圧VH と低い基準電圧VL との2種類で比較すれば、これらVH −VL よりも小さなノイズは矩形波に現れない。
【0011】
【発明の実施の形態】
図1〜4に示すこの発明の実施の形態では、オルタネータ1とオルタネータ脈動検出回路5との間に、ハイパスフィルター7、ローパスフィルター8、及びコンパレータ9を設けている。そして、それ以外の構成については従来例の電動式パワーステアリング装置と同じであり、その詳細な説明を省略する。
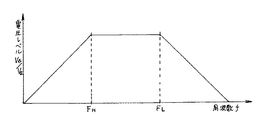
ハイパスフィルター7は、設定周波数FHよりも高い周波数を有する脈動電圧のみを伝えるものである。それに対し、ローパスフィルター8は、設定周波数FLよりも低い周波数を有する脈動電圧のみを伝えるものである。したがって、これらハイパスフィルター7とローパスフィルター8とによって、オルタネータ脈動検出回路5側に伝えられる脈動電圧は、周波数FH〜FLの範囲のものに限られることになる。
図2に、フィルター7、8による周波数特性を示す。この図2からも分かるように、脈動電圧の周波数が周波数FH〜FLの範囲にあれば、減衰することなくフィルター7、8を通過する。それに対し、脈動電圧の周波数が、周波数FH〜FLの範囲外にあると、フィルター7、8により減衰させられる。
なお、図2の縦軸で、Vaはフィルター7、8を通過する前の電源電圧あり、また、Vbはフィルター7、8を通過した後の電源電圧である。
【0012】
ここで、オルタネータ1の脈動周波数Fとエンジン回転数Nとの間には、次式(1)の関係がある。
F=(k×N×a)/60 ・・・(1)
ただし、F:オルタネータの脈動周波数(HZ)
k:オルタネータの極数 (オルタネータの一回転で発生する脈動)
N:エンジン回転数(rpm)
a:プーリ比 (オルタネータ回転数/エンジン回転数)
オルタネータの極数kやプーリ比aは、車種などにより異なるが、あらかじめ知ることができる数値である。また、エンジン回転数Nについても、車種などにより異なるが、実用されうるエンジン回転数Nの範囲をあらかじめ知ることができる。
したがって、オルタネータの脈動周波数Fがとりうる範囲は、式(1)から予測することができる。
【0013】
例えば、オルタネータ1の脈動周波数Fが、F0〜F1の範囲で変化すると予想できたとする。
このとき、ハイパスフィルター7の設定周波数FHを、予想される最低周波数F0よりやや小さく設定する。また、ローパスフィルター8の設定周波数FLを、予想される最低周波数F0よりやや大きく設定する。
このようにして設定周波数FH、FLを決めれば、電源電圧Vに含まれている脈動電圧のうちオルタネータ1の脈動電圧が、フィルター7、8を通過してオルタネータ脈動検出回路5側に伝えられる。しかも、周波数FH〜FLの範囲の外にある脈動を有する脈動電圧は、フィルター7、8により減衰させることができる。
【0014】
なお、フィルター7、8を通過した電源電圧Vは、コンパレータ9で所定の基準電圧と比較される。そして、矩形波に変換されてから、オルタネータ脈動検出回路5に伝えられる。
このようにして矩形波に変換されたら、オルタネータ脈動検出回路5が、この矩形波の周波数を周波数測定などの方法により検出する。さらに、この周期をオルタネータ1の脈動周波数Fの周期とみなして、制御回路3に出力する。
そして、制御回路3で、この検出されたオルタネータの脈動周波数Fと、あらかじめ分かっているオルタネータの極数k及びプーリ比aとを、
N=60×F/(k×a)
に代入し、エンジン回転数Nを算出することができる。
【0015】
次に、この実施の形態をより具体的に説明する。
例えば、オルタネータの極数k=36、また、プーリ比a=2であるとする。この場合、エンジン回転数Nが実際に使用されうる400〜10,000(rpm)程度の範囲で考えると、オルタネータ1の脈動周波数Fは、式(1)から480(HZ)〜12(KHZ)の範囲にあると予想される。
ここで、電源電圧Vには、オルタネータ1の脈動電圧以外にも、次のような電圧変動による脈動電圧が含まれている。
【0016】
例えば、オルタネータ1にはレギュレータ1aが組み込まれ、オルタネータ1をオン・オフ調整している。
つまり、オルタネータ1の発電によりバッテリBが蓄電されるが、そのバッテリ電圧が上昇すると、レギュレータ1aがオルタネータ1をオフにし、発電を停止させる。なお、実際には、オルタネータ1が急に停止するわけではなく、その発電電流が徐々に下がることになる。これは、オルタネータ1内部のコイルに印加する電圧を停止しても、このコイルの慣性電流がある時間だけ流れつづけるためである。
反対に、バッテリ電圧が下降すると、レギュレータ1aがオルタネータ1をオンにし、発電を始めさせる。
このようにして、レギュレータによってオルタネータ1の発電を調節し、バッテリBの蓄電量を一定に保っている。しかし、このオン・オフによる電圧変動の脈動周波数が、電源電圧Vの脈動周波数に混ざってしまうことになる。
【0017】
このオルタネータ1のオン・オフによる電圧変動の脈動周波数は、バッテリB及びオルタネータ1の特性(例えば、オルタネータの極数を変更する)や、電気負荷の条件などにより異なるが、図3に示すようにオルタネータの脈動周波数Fに比べて低い範囲で、ある程度自由に設定することができる。そして、ここでは100(HZ)程度としている。
そこで、ハイパスフィルター7の設定周波数FHを、例えば400(HZ)程度に設定すれば、オルタネータ1のオン・オフによる脈動電圧が、ハイパスフィルター7により減衰させられることになる。もちろん、前記したように、オルタネータの脈動周波数Fは最低でも480(HZ)程度なので、オルタネータ1による脈動電圧がハイパスフィルター7によって減衰させられることはない。
このように、ハイパスフィルター7を通過させることで、例えば、オルタネータ1のオン・オフによる脈動電圧を減衰させることができる。
【0018】
また、電源電圧Vの脈動周波数には、モータ駆動素子のPWM制御による電圧変動の脈動周波数も含まれている。
モータ駆動素子のPWM制御による電圧変動の脈動周波数は、回路設計によって、ある程度自由に決定することができる。そして、その脈動周波数は、図4に示すように、オルタネータ1の脈動周波数Fがとりうる最高値よりも高く設定している。そして、この実施の形態では、PWM制御による電圧変動の脈動周波数を、オルタネータ1の脈動周波数Fがとりうる最高値12(KHZ)よりも高い23(KHZ)としている。
したがって、ローパスフィルター8の設定周波数FLを、例えば15(KHZ)程度に設定すれば、PWM制御による脈動電圧は、このローパスフィルター8により減衰させられることになる。もちろん、前記したように、オルタネータ1の脈動周波数Fは最高でも12(KHZ)程度なので、オルタネータ1の脈動電圧がローパスフィルター8によって減衰させられることはない。
このように、ローパスフィルター8を通過させることで、例えば、PWM制御による脈動電圧を減衰させることができる。
【0019】
その他にも、電源電圧Vに含まれる脈動周波数のうち、400(HZ)〜15(KHZ)の範囲以外における脈動電圧は、フィルター7、8により減衰させることができる。
したがって、他の電気負荷6で電圧変動が生じても、この電圧変動による脈動周波数が400(HZ)〜15(KHZ)の範囲外にあれば、その脈動電圧を減衰させることができる。
【0020】
この実施の形態の電動式パワーステアリング装置によれば、フィルター7、8により、例えば、レギュレータ1aのオン・オフによる電圧変動の脈動周波数や、PWM制御による電圧変動の脈動周波数や、他の電気負荷における電圧変動の脈動周波数による影響をなくすことができる。したがって、電源電圧の脈動周波数から、正確なオルタネータの脈動周波数を知ることができる。
また、フィルター7、8を通過した周波数信号を、コンパレータ9で矩形波に変換してから周波数を測定している。したがって、細かなノイズによる影響をなくすことができ、正確なオルタネータの脈動周波数Fを知ることができる。
このようにして、オルタネータ1の脈動周波数を正確に知ることができれば、そこから、正確なエンジン回転数Nを算出することができる。
【0021】
【発明の効果】
第1の発明によれば、電源電圧に含まれる脈動周波数のうち、設定範囲外にある周波数の脈動電圧を減衰させることができるので、オルタネータの脈動周波数を正確に検出できる。特に、レギュレータのオン・オフによる脈動電圧や、PWM制御による脈動電圧や、他の電気負荷で発生した電圧変動の脈動電圧を減衰させることができる。
また、第2の発明によれば、容易にオルタネータの周波数を測定できる。しかも、の細かなノイズによる影響をなくすことができ、正確にオルタネータの脈動周波数Fを知ることができる。
このように、これら第1および第2の発明によれば、オルタネータの脈動周波数から、正確なエンジン回転数を算出することができる。
【図面の簡単な説明】
【図1】この発明の実施の形態における電動式パワーステアリング装置の回路図である。
【図2】ハイパスフィルター7及びローパスフィルター8による周波数特性を示す。
【図3】レギュレータ1aのオン・オフによる電圧変動の特性を示した図である。
【図4】PWM制御による電圧変動の特性を示した図である。
【図5】従来例の電動式パワーステアリング装置の回路図である。
【図6】電源電圧Vに重畳するオルタネータの脈動電圧の特性を示した図である。
【符号の説明】
m 電動モータ
C コントローラー
B バッテリ
1 オルタネータ
1a レギュレータ
2 駆動回路
3 制御回路
5 オルタネータ脈動検出回路
7 ハイパスフィルター
8 ローパスフィルター
9 コンパレータ
FH、FL 設定周波数
【発明の属する技術分野】
この発明は、オルタネータの脈動周波数からエンジン回転数を算出する電動式パワーステアリング装置に関する。
【0002】
【従来の技術】
図5、6に示す従来例の電動パワーステリング装置では、アシスト力を付与するための電動モータmが、コントローラーCを介して、バッテリBに接続している。
上記バッテリBには、オルタネータ1を接続している。オルタネータ1は、図示しないエンジンに連動して駆動し、交流電圧を発電する。そして、この交流電圧を整流して、バッテリBに蓄電させるものである。
このオルタネータ1には、オルタネータの1の発電量を調節するレギュレータ1aが組み込まれている。つまり、バッテリ電圧が上昇すると、レギュレータ1aがオルタネータ1の発電を停止させ、反対に、バッテリ電圧が降下すると、レギュレータ1aがオルタネータ1に発電を開始させる。このようにしてレギュレータ1aがオルタネータ1をオン・オフ調整し、バッテリBの蓄電量を一定に保っている。
【0003】
また、上記コントローラーCは、電動モータmを制御するためのもので、電動モータmに電圧を印加する駆動回路2、この駆動回路2をPWM制御する制御回路3、及びコントローラーCに電源電圧を印加する電源回路4などから構成されている。
上記駆動回路2は、主にモータ駆動素子から構成されている。そして、これらモータ駆動素子は、車両の走行状態に応じて制御回路3によりPWM制御され、電動モータmを正転あるいは逆転させる。このようにして電動モータmが駆動すると、その出力が図示しない操舵機構に伝えられ、操舵をアシストすることになる。
【0004】
さらに、このコントローラーCには、オルタネータ脈動検出回路5を設けている。そして、次のようにして、エンジン回転数Nを算出している。
電動式パワーステアリング装置の電源電圧Vには、オルタネータ1の発電交流電圧を整流した電圧が重畳している。
ここで、オルタネータ1はエンジンにより駆動するため、オルタネータ1の発電した交流電圧は、エンジン回転Nの脈動に比例した脈動周波数を有する。したがって、この交流電圧を整流した電圧の脈動周波数も、エンジン回転数Nに比例することになる。
つまり、図6に示すように、電源電圧Vは、オルタネータ1の脈動周波数と同じ脈動周波数を有することになる。したがって、この電源電圧Vの脈動周波数をオルタネータ脈動検出回路5で検出すれば、オルタネータ1の脈動周波数Fを知ることができる。そして、オルタネータの脈動周波数Fを知ることができれば、エンジン回転数Nを算出できる。
【0005】
このようにしてエンジン回転数Nを算出できれば、例えば、制御回路3が電源回路4を制御し、必要なときにだけコントローラーCに主電源を印加させることができる。つまり、算出したエンジン回転数Nが設定値よりも大きければ、制御回路3が電源回路4を動作させて、主電圧をコントローラーCに印加させる。それに対し、エンジン回転数Nが設定値以下であれば、制御回路3はシステムを起動する必要が無いと判断し、電源回路4を動作させて、バックアップ電圧のみをコントローラーCに印加させる。
このようにすれば、コントローラーCのオン・オフを、外部のイグニションスイッチIGに連動させる必要がなくなり、外部配線を少なくできる。そして、外部配線を少なくできれば、それだけ電動式パワーステアリング装置のコストダウン及び小型化が可能となる。
また、エンジン回転数Nは車速とほぼ比例するので、エンジン回転数Nが分かれば、車速を推定することもできる。したがって、車速を検出する必要な場合にも、車速センサを設ける必要がなく、コストダウン及び小型化が可能となる。
【0006】
【発明が解決しようとする課題】
しかしながら、上記従来例における電動式パワーステアリング装置では、エンジン回転数Nを正確に算出できないことがあった。
その第1の理由は、オルタネータ1がレギュレータ1aによりオン・オフ調整されているからである。つまり、このオン・オフが繰り返されると、オルタネータ1が発電・停止を繰り返し、その電圧変動が電源電圧Vに重畳してしまう。そのため、電源電圧Vの脈動周波数に、オン・オフによる電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
第2の理由は、駆動回路5のモータ駆動素子が、制御回路3によりPWM制御されているからである。つまり、モータ駆動素子がPWM制御されると、その電圧変動が電源電圧Vにも重畳してしまう。そのため、電源電圧Vの脈動周波数に、PWM制御による電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
【0007】
第3の理由は、バッテリBには、この電動式パワーステアリング装置以外にも、他の電気負荷6を接続しているからである。つまり、例えば、他の電気負荷6を停止・起動させると電圧変動が生じてしまい、その電圧変動が電源電圧Vに重畳してしまう。そのため、電源電圧Vの脈動周波数に、他の電気負荷6で発生した電圧変動の脈動周波数が混ざってしまい、オルタネータ1の脈動周波数Fを正確に検出することができなかった。
この発明の目的は、正確にオルタネータの脈動周波数を検出し、正確なエンジン回転数を算出できる電動式パワーステアリング装置を提供することである。
【0008】
【課題を解決するための手段】
この発明は、操舵アシスト力を付与する電動モータと、電動モータを制御するコントローラーと、コントローラーに接続したバッテリと、エンジンに連係するオルタネータと、このオルタネータを調整するレギュレータとを備え、しかも、上記コントローラーは、電動モータに電圧を印加する駆動回路と、電源電圧の脈動周波数からオルタネータの脈動周波数を検出するオルタネータ脈動検出回路と、駆動回路をPWM制御する一方、オルタネータの脈動周波数からエンジン回転数を算出する制御回路とからなる電動式パワーステアリング装置を前提とする。
そして、第1の発明は、所定の周波数範囲における脈動電圧のみをオルタネータ脈動検出回路に伝えるフィルターを設け、フィルターは、設定した周波数よりも高い周波数の脈動電圧を伝えるハイパスフィルターと、設定した周波数よりも低い周波数の脈動電圧を伝えるローパスフィルターとからなり、しかも、レギュレータの調整による電圧変動の脈動周波数をハイパスフィルターの設定周波数よりも低く、また、PWM制御による電圧変動の脈動周波数をローパスフィルターの設定周波数よりも高くした点に特徴を有する。
【0009】
このような構成にしたので、電源電圧の脈動周波数のうち、設定した範囲の外にある脈動電圧はフィルターにより減衰させることができる。特に、オルタネータのオン・オフ調整による脈動電圧や、PWM制御による脈動電圧を減衰させることができる。
つまり、レギュレータのオン・オフ調整による電圧変動の脈動周波数は、オルタネータの脈動周波数よりも低くしているので、その脈動電圧をハイパスフィルターにより減衰させることができる。なお、この脈動周波数は、オルタネータの特性、例えばオルタネータの極数等を変更したり、レギュレータやバッテリの特性を変更したりすることで、ある程度任意に設定できる。
それに対し、駆動回路のPWM制御による電圧変動の脈動周波数は、オルタネータの脈動周波数よりも高くしているので、その脈動電圧をローパスフィルターにより減衰させることができる。なお、この脈動周波数は、駆動回路の設計などにより、ある程度任意に設定できる。
もちろん、これら以外にも、設定範囲外にある周波数を有する脈動電圧を減衰させられるので、例えば、他の電気負荷による電圧変動の脈動周波数による影響を小さくすることができる。
【0010】
第2の発明は、第1の発明において、フィルターを通過した脈動電圧を所定の基準電圧と比較し、矩形波に変換するコンパレータを設け、オルタネータ脈動検出回路は、この矩形波の周期から、オルタネータの脈動周波数を検出する構成とした点に特徴を有する。
このような構成にしたので、矩形波に変換してから周波数を検出でき、容易に、しかも、正確に周波数を測定できる。
また、基準電圧の設定しだいでは、細かなノイズによる影響をなくすことができる。例えば、電源電圧を、高い基準電圧VH と低い基準電圧VL との2種類で比較すれば、これらVH −VL よりも小さなノイズは矩形波に現れない。
【0011】
【発明の実施の形態】
図1〜4に示すこの発明の実施の形態では、オルタネータ1とオルタネータ脈動検出回路5との間に、ハイパスフィルター7、ローパスフィルター8、及びコンパレータ9を設けている。そして、それ以外の構成については従来例の電動式パワーステアリング装置と同じであり、その詳細な説明を省略する。
ハイパスフィルター7は、設定周波数FHよりも高い周波数を有する脈動電圧のみを伝えるものである。それに対し、ローパスフィルター8は、設定周波数FLよりも低い周波数を有する脈動電圧のみを伝えるものである。したがって、これらハイパスフィルター7とローパスフィルター8とによって、オルタネータ脈動検出回路5側に伝えられる脈動電圧は、周波数FH〜FLの範囲のものに限られることになる。
図2に、フィルター7、8による周波数特性を示す。この図2からも分かるように、脈動電圧の周波数が周波数FH〜FLの範囲にあれば、減衰することなくフィルター7、8を通過する。それに対し、脈動電圧の周波数が、周波数FH〜FLの範囲外にあると、フィルター7、8により減衰させられる。
なお、図2の縦軸で、Vaはフィルター7、8を通過する前の電源電圧あり、また、Vbはフィルター7、8を通過した後の電源電圧である。
【0012】
ここで、オルタネータ1の脈動周波数Fとエンジン回転数Nとの間には、次式(1)の関係がある。
F=(k×N×a)/60 ・・・(1)
ただし、F:オルタネータの脈動周波数(HZ)
k:オルタネータの極数 (オルタネータの一回転で発生する脈動)
N:エンジン回転数(rpm)
a:プーリ比 (オルタネータ回転数/エンジン回転数)
オルタネータの極数kやプーリ比aは、車種などにより異なるが、あらかじめ知ることができる数値である。また、エンジン回転数Nについても、車種などにより異なるが、実用されうるエンジン回転数Nの範囲をあらかじめ知ることができる。
したがって、オルタネータの脈動周波数Fがとりうる範囲は、式(1)から予測することができる。
【0013】
例えば、オルタネータ1の脈動周波数Fが、F0〜F1の範囲で変化すると予想できたとする。
このとき、ハイパスフィルター7の設定周波数FHを、予想される最低周波数F0よりやや小さく設定する。また、ローパスフィルター8の設定周波数FLを、予想される最低周波数F0よりやや大きく設定する。
このようにして設定周波数FH、FLを決めれば、電源電圧Vに含まれている脈動電圧のうちオルタネータ1の脈動電圧が、フィルター7、8を通過してオルタネータ脈動検出回路5側に伝えられる。しかも、周波数FH〜FLの範囲の外にある脈動を有する脈動電圧は、フィルター7、8により減衰させることができる。
【0014】
なお、フィルター7、8を通過した電源電圧Vは、コンパレータ9で所定の基準電圧と比較される。そして、矩形波に変換されてから、オルタネータ脈動検出回路5に伝えられる。
このようにして矩形波に変換されたら、オルタネータ脈動検出回路5が、この矩形波の周波数を周波数測定などの方法により検出する。さらに、この周期をオルタネータ1の脈動周波数Fの周期とみなして、制御回路3に出力する。
そして、制御回路3で、この検出されたオルタネータの脈動周波数Fと、あらかじめ分かっているオルタネータの極数k及びプーリ比aとを、
N=60×F/(k×a)
に代入し、エンジン回転数Nを算出することができる。
【0015】
次に、この実施の形態をより具体的に説明する。
例えば、オルタネータの極数k=36、また、プーリ比a=2であるとする。この場合、エンジン回転数Nが実際に使用されうる400〜10,000(rpm)程度の範囲で考えると、オルタネータ1の脈動周波数Fは、式(1)から480(HZ)〜12(KHZ)の範囲にあると予想される。
ここで、電源電圧Vには、オルタネータ1の脈動電圧以外にも、次のような電圧変動による脈動電圧が含まれている。
【0016】
例えば、オルタネータ1にはレギュレータ1aが組み込まれ、オルタネータ1をオン・オフ調整している。
つまり、オルタネータ1の発電によりバッテリBが蓄電されるが、そのバッテリ電圧が上昇すると、レギュレータ1aがオルタネータ1をオフにし、発電を停止させる。なお、実際には、オルタネータ1が急に停止するわけではなく、その発電電流が徐々に下がることになる。これは、オルタネータ1内部のコイルに印加する電圧を停止しても、このコイルの慣性電流がある時間だけ流れつづけるためである。
反対に、バッテリ電圧が下降すると、レギュレータ1aがオルタネータ1をオンにし、発電を始めさせる。
このようにして、レギュレータによってオルタネータ1の発電を調節し、バッテリBの蓄電量を一定に保っている。しかし、このオン・オフによる電圧変動の脈動周波数が、電源電圧Vの脈動周波数に混ざってしまうことになる。
【0017】
このオルタネータ1のオン・オフによる電圧変動の脈動周波数は、バッテリB及びオルタネータ1の特性(例えば、オルタネータの極数を変更する)や、電気負荷の条件などにより異なるが、図3に示すようにオルタネータの脈動周波数Fに比べて低い範囲で、ある程度自由に設定することができる。そして、ここでは100(HZ)程度としている。
そこで、ハイパスフィルター7の設定周波数FHを、例えば400(HZ)程度に設定すれば、オルタネータ1のオン・オフによる脈動電圧が、ハイパスフィルター7により減衰させられることになる。もちろん、前記したように、オルタネータの脈動周波数Fは最低でも480(HZ)程度なので、オルタネータ1による脈動電圧がハイパスフィルター7によって減衰させられることはない。
このように、ハイパスフィルター7を通過させることで、例えば、オルタネータ1のオン・オフによる脈動電圧を減衰させることができる。
【0018】
また、電源電圧Vの脈動周波数には、モータ駆動素子のPWM制御による電圧変動の脈動周波数も含まれている。
モータ駆動素子のPWM制御による電圧変動の脈動周波数は、回路設計によって、ある程度自由に決定することができる。そして、その脈動周波数は、図4に示すように、オルタネータ1の脈動周波数Fがとりうる最高値よりも高く設定している。そして、この実施の形態では、PWM制御による電圧変動の脈動周波数を、オルタネータ1の脈動周波数Fがとりうる最高値12(KHZ)よりも高い23(KHZ)としている。
したがって、ローパスフィルター8の設定周波数FLを、例えば15(KHZ)程度に設定すれば、PWM制御による脈動電圧は、このローパスフィルター8により減衰させられることになる。もちろん、前記したように、オルタネータ1の脈動周波数Fは最高でも12(KHZ)程度なので、オルタネータ1の脈動電圧がローパスフィルター8によって減衰させられることはない。
このように、ローパスフィルター8を通過させることで、例えば、PWM制御による脈動電圧を減衰させることができる。
【0019】
その他にも、電源電圧Vに含まれる脈動周波数のうち、400(HZ)〜15(KHZ)の範囲以外における脈動電圧は、フィルター7、8により減衰させることができる。
したがって、他の電気負荷6で電圧変動が生じても、この電圧変動による脈動周波数が400(HZ)〜15(KHZ)の範囲外にあれば、その脈動電圧を減衰させることができる。
【0020】
この実施の形態の電動式パワーステアリング装置によれば、フィルター7、8により、例えば、レギュレータ1aのオン・オフによる電圧変動の脈動周波数や、PWM制御による電圧変動の脈動周波数や、他の電気負荷における電圧変動の脈動周波数による影響をなくすことができる。したがって、電源電圧の脈動周波数から、正確なオルタネータの脈動周波数を知ることができる。
また、フィルター7、8を通過した周波数信号を、コンパレータ9で矩形波に変換してから周波数を測定している。したがって、細かなノイズによる影響をなくすことができ、正確なオルタネータの脈動周波数Fを知ることができる。
このようにして、オルタネータ1の脈動周波数を正確に知ることができれば、そこから、正確なエンジン回転数Nを算出することができる。
【0021】
【発明の効果】
第1の発明によれば、電源電圧に含まれる脈動周波数のうち、設定範囲外にある周波数の脈動電圧を減衰させることができるので、オルタネータの脈動周波数を正確に検出できる。特に、レギュレータのオン・オフによる脈動電圧や、PWM制御による脈動電圧や、他の電気負荷で発生した電圧変動の脈動電圧を減衰させることができる。
また、第2の発明によれば、容易にオルタネータの周波数を測定できる。しかも、の細かなノイズによる影響をなくすことができ、正確にオルタネータの脈動周波数Fを知ることができる。
このように、これら第1および第2の発明によれば、オルタネータの脈動周波数から、正確なエンジン回転数を算出することができる。
【図面の簡単な説明】
【図1】この発明の実施の形態における電動式パワーステアリング装置の回路図である。
【図2】ハイパスフィルター7及びローパスフィルター8による周波数特性を示す。
【図3】レギュレータ1aのオン・オフによる電圧変動の特性を示した図である。
【図4】PWM制御による電圧変動の特性を示した図である。
【図5】従来例の電動式パワーステアリング装置の回路図である。
【図6】電源電圧Vに重畳するオルタネータの脈動電圧の特性を示した図である。
【符号の説明】
m 電動モータ
C コントローラー
B バッテリ
1 オルタネータ
1a レギュレータ
2 駆動回路
3 制御回路
5 オルタネータ脈動検出回路
7 ハイパスフィルター
8 ローパスフィルター
9 コンパレータ
FH、FL 設定周波数
Claims (2)
- 操舵アシスト力を付与する電動モータと、電動モータを制御するコントローラーと、コントローラーに接続したバッテリと、エンジンに連係するオルタネータと、このオルタネータを調整するレギュレータとを備え、しかも、上記コントローラーは、電動モータに電圧を印加する駆動回路と、電源電圧の脈動周波数からオルタネータの脈動周波数を検出するオルタネータ脈動検出回路と、駆動回路をPWM制御する一方、オルタネータの脈動周波数からエンジン回転数を算出する制御回路とからなる電動式パワーステアリング装置において、所定の周波数範囲における脈動電圧のみをオルタネータ脈動検出回路に伝えるフィルターを設け、このフィルターは、設定した周波数よりも高い周波数の脈動電圧を伝えるハイパスフィルターと、設定した周波数よりも低い周波数の脈動電圧を伝えるローパスフィルターとからなり、しかも、レギュレータの調整による電圧変動の脈動周波数をハイパスフィルターの設定周波数よりも低く、また、PWM制御による電圧変動の脈動周波数をローパスフィルターの設定周波数よりも高くしたことを特徴とする電動式パワーステアリング装置。
- フィルターを通過した脈動電圧を所定の基準電圧と比較し、矩形波に変換するコンパレータを設け、オルタネータ脈動検出回路は、この矩形波の周期から、オルタネータの脈動周波数を検出する構成としたことを特徴とする請求項1記載の電動式パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21958495A JP3641027B2 (ja) | 1995-08-04 | 1995-08-04 | 電動式パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21958495A JP3641027B2 (ja) | 1995-08-04 | 1995-08-04 | 電動式パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0948357A JPH0948357A (ja) | 1997-02-18 |
| JP3641027B2 true JP3641027B2 (ja) | 2005-04-20 |
Family
ID=16737827
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP21958495A Expired - Fee Related JP3641027B2 (ja) | 1995-08-04 | 1995-08-04 | 電動式パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3641027B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2781012B1 (fr) * | 1998-07-13 | 2001-02-16 | Magneti Marelli France | Circuit d'alimentation en carburant a pompe electrique pilotee en pression objective, pour moteur a combustion interne |
-
1995
- 1995-08-04 JP JP21958495A patent/JP3641027B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0948357A (ja) | 1997-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7812469B2 (en) | Battery current detection apparatus incorporated in system which regulates vehicle engine speed and electric generator output voltage during engine idling | |
| JP4151642B2 (ja) | 車両用発電制御システム | |
| US8138730B2 (en) | Voltage controller for vehicle using averaged status signal | |
| JP4581735B2 (ja) | 車両用発電制御装置 | |
| JP4449882B2 (ja) | 車両用発電制御装置 | |
| US5352929A (en) | Apparatus and method for regulating a generator of an internal combustion engine | |
| KR19980086429A (ko) | 차량용 발전기의 제어장치 | |
| JP3613845B2 (ja) | 車両用発電装置 | |
| US20040130281A1 (en) | Motor actuator with torque control | |
| US6029512A (en) | Slip-detecting device for a driving belt of a generator | |
| JP3810441B2 (ja) | 電圧給電装置 | |
| EP0735641B1 (en) | Charge control system for use in internal combustion engine | |
| US5523672A (en) | Voltage-regulator for regulating the voltage of an alternator | |
| JP3374543B2 (ja) | 車両用交流発電機の制御装置 | |
| JP3196036B2 (ja) | 交流発電機の制御方法 | |
| KR100725634B1 (ko) | 차량용 발전 제어 장치 및 차량용 발전 제어 시스템 | |
| JP3641027B2 (ja) | 電動式パワーステアリング装置 | |
| JP2522797Y2 (ja) | 車両用交流発電機の制御装置 | |
| JPH06197600A (ja) | 発電機の発電制御装置 | |
| US5083038A (en) | Vehicle body vibration reduction control apparatus | |
| JP2849318B2 (ja) | 発電制御装置 | |
| JP2664442B2 (ja) | 無整流子電動機の駆動回路 | |
| JPH0584137B2 (ja) | ||
| JPH01311889A (ja) | 誘導電動機の制御装置 | |
| JP3086321B2 (ja) | オルタネータ入力トルク演算方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040928 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050120 |
|
| LAPS | Cancellation because of no payment of annual fees |