JP3645568B2 - 作業場所に対して地形変更マシンを操作する方法と装置 - Google Patents
作業場所に対して地形変更マシンを操作する方法と装置 Download PDFInfo
- Publication number
- JP3645568B2 JP3645568B2 JP51619595A JP51619595A JP3645568B2 JP 3645568 B2 JP3645568 B2 JP 3645568B2 JP 51619595 A JP51619595 A JP 51619595A JP 51619595 A JP51619595 A JP 51619595A JP 3645568 B2 JP3645568 B2 JP 3645568B2
- Authority
- JP
- Japan
- Prior art keywords
- machine
- location
- model
- terrain
- determining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 54
- 230000008859 change Effects 0.000 claims description 35
- 238000012876 topography Methods 0.000 claims description 22
- 238000013500 data storage Methods 0.000 claims description 14
- 239000011159 matrix material Substances 0.000 claims description 6
- 238000012544 monitoring process Methods 0.000 claims description 4
- 230000004044 response Effects 0.000 claims description 2
- 230000003068 static effect Effects 0.000 claims description 2
- 238000001514 detection method Methods 0.000 claims 1
- 238000004513 sizing Methods 0.000 claims 1
- 239000002689 soil Substances 0.000 description 12
- 238000005070 sampling Methods 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 230000000007 visual effect Effects 0.000 description 6
- 238000010276 construction Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000010426 asphalt Substances 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000005553 drilling Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 235000011293 Brassica napus Nutrition 0.000 description 1
- 240000008100 Brassica rapa Species 0.000 description 1
- 235000000540 Brassica rapa subsp rapa Nutrition 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000009412 basement excavation Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000009933 burial Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 235000012054 meals Nutrition 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000033458 reproduction Effects 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
Images















Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2045—Guiding machines along a predetermined path
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B79/00—Methods for working soil
- A01B79/005—Precision agriculture
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/004—Devices for guiding or controlling the machines along a predetermined path
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
- G05D1/0236—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G05D2201/0202—
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Mining & Mineral Resources (AREA)
- Environmental Sciences (AREA)
- Soil Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Architecture (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Operation Control Of Excavators (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
本発明は、作業場所の地形を変更する機械の操作に関する。より詳細には、本発明は、機械によって地形が所望の状態に変更されるように作業場所の地形を集合的に表すディジタルデータをリアルタイムで発生させて、使用することに関する。
本明細書に用いられる“地形変更マシン”及びこれに類似した様々な用語は、トラック式トラクター、地ならし機、塗装用コンクリートミキサー車、アスファルトレーヤのような自走式モービル機械のことを意味し、これらは、(1)フレームを支持する車輪やトラックを駆動する原動機(例えば、エンジン)がフレーム上に設けられているために作業場所の上、或いは中を通る可動性と、(2)ブレード、ショベル、バケット、リッパー等の工具、或いは組になった工具からなる、フレーム上の設備のために、作業場所の地形を変更する能力とを示す。トラック式トラクター、地ならし機、塗装用コンクリートミキサー車及びアスファルトレーヤーのような機械は、一般的に“土壌移動機械、或いは道具”と言われ、これらの機械は、本発明が取り扱う地形変更マシンのサブカテゴリーを構成することがわかる。
背景技術
精巧で、強力な土壌移動機械の開発にもかかわらず、広い敷地の土地の地形を再整形したり、或いは建設地、採鉱所、道路等の作業場所の地形を変更する作業は、時間を要し、重労働を行っている状態のままである。このような操作では、作業場所上に多数のポイントの座標を得て、この後に、場所の3次元モデルを構成するように、光学機械の照準線、或いは他の静止型ポイント毎の計測技術を用いて、現在実施されている測量を必要とすることが多い。この測量から、建築学的構想、即ち目標となる地形が展開される。この後、この場所は、様々な色の杭で注意深く目印がつけられ、いかに機械が元の状態から所望の状態に作業場所を変更するように操作されるべきかをトラック式トラクターのような地形変更マシンのオペレータに物理的な合図を与える。最も熟練した、経験豊かなオペレータのみが、効率的に広い土地の場所を再整形できるが、ひとつには、大型スケールがないとともに、土地改良の進行状況に関する詳細な情報がないためにこのように困難性が生じる。
その結果、広い作業場所の地形的な変更を含む殆どのプロジェクトでは、地ならし機等の操作に熟練者と多くの人員を必要とする点において時間を無駄にし、労働力も必要とする。
さらに、元の場所の地形がどの程度所望の地形に一致するようになったかを知るために、測量者がその日までの進行程度を確認し、手でその場所とともにその場所モデルに手によって杭で目印をつけたり目印をつけ直す間、その操作は中断される。これらの不定期な確認の間、機械のオペレーターと観測者は、リアルタイムで進行状態を計測するための精密な方法を有していない。
発明の開示
本発明は、作業場所の地形を所望の状態に正確にかつ効率的に変更する操作機械の長期にわたる問題に対して解決策を提供する。本発明は、オペレータに知らせるために、その場所に物理的な目印をつける必要なく、例えば、機械に燃料を補給するのに必要とされるような操作における中断のみを有する状態で、かつ作業員に要求されるのが最小限の状態で、このような地形的変更を達成する。
一般的に、これは、実質的にモービル機械に支持されているか、或いは機械から離れて配置されているが、例えば無線結合によって機械に接続されているディジタル的なデータ記憶、検索及び処理設備を設け、その設備によって、与えられた時間でのその場所のディジタル三次元モデルと、例えば設計者が望むようなその場所のディジタルモデルを記憶し、実際に作りだし、変更することによって達成される。
本発明は、さらに、モービルマシン、或いはある場合においてはマシンによって支持される地面接触用具の三次元空間における正確な位置が、リアルタイムで正確に決定される機構を備えている。即ち、この機構が場所の地形を変更するので、マシンがその場所の上、或いは中を動くときリアルタイムでポイント毎に、ディジタル三次元モデルを更新するようになる。後述するように本発明の好ましい実施では、三次元の空間においてセンチメートルの精度にまで対象物を正確に配置することのできる位相差GPS(全地球航法)の使用を含んでいる。
本発明は、所望のディジタル三次元場所モデルを連続的に更新された実際のディジタル三次元場所モデルに比較する手段と、作業場所の上、或いは中の多数の座標のそれぞれに必要とされる変更の程度を表す信号を発生させ、実際のモデルを所望のモデルと一致させる手段とを備えている。これらの信号によって、一例において、マシン上にあるいはマシンから離れて、リアルタイムディスプレイを形成することもでき、全体の場所の少なくとも一部分に関して情報を伝達する基準のフレーム内にリアルタイムでマシンの実際の進行についてオペレータに合図を送る。後述する他の実施例において、所望の三次元モデルと実際の三次元モデルとの間の差を表す信号が、マシン、或いはマシンの一部分、又は双方のリアルタイム自動制御に加えられる。
好ましい形態において、位置決定機構、或いは、システムの少なくとも一部分は、マシンが場所を通過するときにマシンに支持されている。マシンが、分離した地面接触用具を含む場合には、位置決定システムを用具に取りつけることができる。用具がマシンフレーム、或いはキャリッジ、例えば油圧的に作動されるブレード、バケット、或いはスクラッパに対して可動である場合には、用具に場所の表面に対する高さを決定する手段を設けることができる。
本発明の他の態様に関して、ディジタル的なデータ記憶手段と検索手段において場所の所望の地形を表す第一の三次元地形場所モデルと、場所の実際の地形を表す第二の三次元地形場所モデルを作り出して記憶する段階と、この後、マシンが場所を通過して変更するときにモービル地形変更マシン、或いは支持された用具が三次元空間内の瞬間的な位置をリアルタイムで表す信号を発生させる段階と、第二のモデルを更新するようにディジタル信号を用いる段階と、第一モデルと更新された第二のモデルとの間の差を決定する段階と、この差に従ってマシンの操作を導き更新された第二のモデルを第一モデルに一致させる段階とからなる、モービル地形変更マシンの作動を指示するための方法が提供される。
一実施例において、マシンの作動を指示するための段階は、作業場所に関するモービル機械の瞬間的な位置と、この場所を第一の三次元モデルと一致させるのに必要とされる変更と、第一モデルの実現に向けてなされる実際の進行と、をリアルタイムでオペレータに知らせるディスプレイをマシンオペレータに提供することによってなされる。
他の実施例において、マシンの作動を指示するための段階は、電気油圧式アクチュエータを介して実際的に作業することによって自動、或いは半自動の形式で実施され、マシン、又はこのマシンによって支持される地面変更用具の動きの位置、高さ、及び方向を制御する。
好ましい形態において、位置決定手段の少なくとも一部分は、マシンが場所を通過するときにマシン上に支持される。マシンが別個の地面接触用具を含んでいる場合には、位置決定システムを用具に取り付けてもよい。用具がマシンフレーム、或いはキャリッジに対して可動である場合には、場所の表面に対する高さを決定する手段を用具に設けることができる。
後述でより詳細に述べるように、本発明の装置と方法の態様は、様々な方法で達成することができる。例えば、ディジタル的なデータ記憶及び検索設備と更新及び差動手段は、一体化した包括的な内蔵形マシンシステムの一部としてマシンによってかつマシンに支持される。或いは、これらの手段は、場所から離れて配置されるか、或いは可視ディスプレイ信号、即ち、自動制御信号をマシンに伝達し、更新された位置と、マシンが作動中にマシンからの場所情報を受信する設備の近くに配置されてもよい。
後述で詳細に述べるように、地形変更マシンはトラック式トラクター、地ならし機、コンクリートミキサー車、或いはアスファルトレーヤのような土壌移動道具であればよい。マシンは、位置システムの能力によって、露天堀り、或いは土壌掘り操作においてみられるモービル機械のような地下、即ち地中操作を行うことができる。
好ましい形態において、本発明の方法と装置の態様は、位相差GPS受信システムを用いて全地球航法から得られた三次元の位置情報を用いることによって理解できる。このようなGPS受信機は、全地球航法からの信号と、既知の位置座標の局部基準受信機からの差動信号を用いて、センチメートルの精密さで位置座標データを形成する。従って、好ましい態様で本発明を実施するのに用いられた装置は、GPS信号受信能力と局部信号受信能力の双方を備えたGPS受信機を備えており、かつ測地学的に測量される場所で局部基準信号が手に入らない領域では、局部データ処理装置に補正信号を与えるように一時的に測量された差動受信機/送信機を備えている。或いは生位置データは基準受信機から局部データプロセッサに伝達されることができ、マシンに取りつけられた受信機からの情報と比較し補正する。
本発明の他の態様において、建設場所、採鉱所、及び道路のような場所の地形を変更するように操作を実施するのに用いるのに適したディスプレイを正確に発生させて制御して、段階的にモービルマシンによってなされた進行を正確にディスプレイするようにする手段が提供されている。ディスプレイの単位面積は、GPS受信機とディジタルプロセッサシステムのサンプリング速度に対応していてもよいし、対応していなくてもよい。後述するように、場所、即ち詳細にその場所のディスプレイ可能な部分が連続したマトリックスに小さくわけられる。このマトリックスの単位面積の大きさは、モービルマシンがGPS受信機とデータ処理設備のサンプリング速度よりも大きい速度で通過するような大きさである。土壌変更用具、或いは道具の物理的パラメータと大きさ、及びこれらの関係を考慮するアルゴリズムが物理的マシンとその進行通路に適用される。ディスプレイの単位面積は、書き込まれたり、色付けされたり、修正されたり、或いはGPS受信機或いは他の位置決めシステムから得られた進行情報及び後述するようにディジタル処理設備内に存在するアルゴリズムの法則に従ったディジタル処理設備に従って変更される。
本発明の一実施例において、位置読み取りの間の場所に関するマシンのリアルタイムの通路は、実際の幅よりも小さいか等しいマシンの地形変更部分の有効幅を決定する差動アルゴリズムで決定され、この有効幅が通過する場所モデルの各部分を更新する。好ましい態様において、マシンが場所を通過するときのマシンの瞬間的な位置は、場所モデル上で一連の座標点としてたどられる。座標点をたどる速度が場所の単位面積、即ちグリッド要素上のマシンの進行速度と等しい場合には、差動アルゴリズムは、座標点間でマシンの地形変更部分が通過した単位面積を決定する。地形変更部分が連続した幅、例えばブレード或いはスクラッパ要素である場合には、ブレードの有効パラメータは、実際のパラメータよりも小さく設定されるのが好ましく、ブレードによって実際に操作された場所の部分のみが書き込まれたり、色付けされたり、修正されたり、或いは場所に対する変更と、実際の場所モデルと、所望の場所モデル間の現在の差を示すように変更されたり印がつけられたりする。
より明白にするために、最初の場所測量が、第一の三次元地形場所モデルを構成するように様々な方法で形成することができる。本発明の一実施例、或いは利用において、標準の公知の場所測量方法と、使用される特定のディジタル化したデータシステムの物理的及びデータ処理の要求に従ってディジタル化された、公知の標準的測量からのデータを用いて、第一のモデルを作り出してもよい。或いは、実際の場所地形モデルは、地形変更マシンで、或いはこの状態に適応した特別なマシン、又は車両を用いることによって場所を通過することから形成してもよい。例えば、滑らかで比較的改良された地形的な場所では、小型トラックが通過できるが、あまり改良されていなかったり、或いは起状の大きい場所では特別な車両、或いは受信機、その場所を歩いて通る人間によって運ばれるディジタル化された、または記憶設備も必要となる。あるいは、特に困難な場所では、ステレオ写真、或いは、ホログラフィの設備を用いて空気によって測量される。更に、他の変更例において地中の地形は、様々な場所で、また様々な深さで多量のコアサンプルを形成し、このようなサンプルから地中の場所モデルを構成することによって測量してもよい。
【図面の簡単な説明】
図1は、本発明に従った機械位置及び制御方法を表す概略図である。
図2は、GPS信号を受信し、処理に用いて、本発明を実施することのできる装置の概略図である。
図3は、GPS位置を用いる図2のシステムの一実施例の詳細図である。
図4は、作業場所、地形変更マシン、及び本発明の例示した地面輪郭形成実施例に係る位置及び制御システムの概略図である。
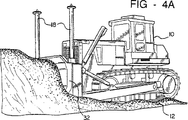
図4Aは、図4のマシンに取りつけられた位置システムの他の構造である。
図5A−5Bは、本発明に用いられたような例示的なディジタル化された場所モデルのグラフによる再生である。
図6A乃至6Dは、図4における地面輪郭形成操作のための本発明に従って形成されたリアルタイムオペレータディスプレイである。
図7A乃至7Dは、本発明に従ったダイナミックデータベースのフローチャートである。
図8は、閉じたループの自動マシン制御システムを含む本発明のシステムの概略図である。
発明を実施するための最良の形態
図1を参照すると、本発明の方法が概略的に示されている。例えば、3−Dレーザ、GPS、GPS/レーザーの組合せ、レーダーのような外部基準器を備えた、公知の3次元場所決めシステムを用いて、マシン、或いは工具位置の地形位置座標は、マシンがその場所上を動くときにブロック100内で決定される。これらの座標は、即座に一連の別個のポイントとして差動アルゴリズムにブロック102で供給される。この差動アルゴリズムはリアルタイムにおける機械位置と通路を計算する。実際と所望の場所の地形のディジタル化されたモデルが、例えば局部ディジタルコンピュータのような接近可能なディジタル記録と検索設備にブロック104でロード、即ち記憶されたりする。差動アルゴリズム102は、104からの場所モデルを検索し、処理して更新し、ブロック106で実際の場所と所望の場所モデルの間の差の場所のダイナミックデータベースが作り出され、新しい場所の情報がブロック100から受け取られるときに実際の場所モデルをリアルタイムで更新する。次いで、この動的に更新された場所モデルは、ディスプレーステップ108内でオペレータに知らされ、リアルタイムの位置、方向及び場所地形/トポグラフィーの更新が人間の読み取り可能な形態で与えられる。ディスプレーからの情報を用いて、オペレーターは、効率良くモニターできブロック109においてマシンを手で制御する。
さらに、或いはダイナミック更新情報が、ブロック110で、例えばキャタピラー社によって開発された種類の電気油圧システムのような自動マシン制御システムに与えることができ、様々なポンプ、バルブ、油圧シリンダ、モーター/操縦機構、及び地形的変更マシンに用いられる他の制御を操作するように用いられる。電気油圧制御は、オペレータの動作が、例えばマシンをオバーロードさせるような場合、マシンの作業を最小にしてマニュアル制御を制限するのに役立つことができる。或いは、ダイナミックデータベースからの場所更新情報は、完全な自動マシン/工具制御を完全に行うのに用いることができる。
この方法で、最初の実際場所地形/トポグラフィーモデルがマシンによって、まだ測量されていない領域に形成できることが前述から明白である。与えられた場所上において規則的なパターンでマシンを単に動かすことによって、場所の地形は、ブロック104でロードされた、所望の建築的場所モデルに関して決定される。マシンが、全範囲の場所を通過して、実際の地形を正確に決定した後、実際の場所モデルは、モニターされて、マシンが実際の地理を所望の位置モデルと一致させるときにブロック106でリアルタイムで更新できる。
図2を参照すると、本発明を実施するためにGPS信号の受信と処理に関して用いることのできる装置が、局地基準アンテナと衛星アンテナとを備えたGPS受信装置120と、差動アルゴリズムを用いて120からの信号を受信するように接続されたディジタルプロセッサ124と、プロセッサ124によってアクセスされ、更新されるディジタル記録と検索設備126及びオペレータディスプレイ、又はプロセッサ124から信号を受信するブロック128における自動マシンコントロールと、からなるブロック線図の形態で示されている。
GPS受信システム120は、全地球航法からの信号を受信する衛星アンテナと、局部基準アンテナ含んでいる。GPS受信システム120は、衛星アンテナからの位置信号と、局部アンテナからの差動補正信号を用いて3次元における位置座標データを移動物体に対してセンチメートルの精密さで作り出す。或いは基準アンテナからの生データがシステムによって処理されて差動補正を決定することができる。
この位置情報は、GPS受信機120の座標サンプリングの速度が許すかぎりリアルタイムでディジタルプロセッサ124に供給される。ディジタル記憶設備126は、例えばアーキテクチュアプランに従って所望の場所地形の第一の場所モデルと、例えば最初に測量されたような実際の場所地形の第二のディジタル化された場所モデルとを記憶する。実際の場所地形に対応する場所モデルは、ディジタルプロセッサ124がGPS受信機120から新しい位置情報を受信するときにディジタルプロセッサ124によってリアルタイムでアクセスされ更新できる。
ディジタルプロセッサ124は、連続的に更新された実際の場所モデルとアーキテクチュアプランとの差を表す信号を発信する。これらの信号は、128においてオペレータディスプレイ、又は自動マシンコントールに与えられて、場所上でマシンの操作を導き、更新された実際の場所モデルをアーキテクチュアプランと一致させる。オペレータディスプレイ128は、例えば実際の連続的に更新された場所モデルと所望の場所モデルとの差の一つか、それ以上の視覚的な表示を与えて、必要な地形変更操作のためにマシンを走行させる際にオペレータをガイドする。
図3を参照すると、図2に対応するより詳細なシステムの概略図が場所基準信号のためのキネマティックGPSを用いて示されている。ベースの標準モジュール40と位置モジュール50は、ともに場所に関する地形変更マシンの3次元の座標を決定し、更新/制御モジュール60は、この位置情報を正確にマシンをモニターし、制御するのに用いることのできる、場所のリアルタイム表示に変換する。
基本標準モジュール40は、静止GPS受信機16、この受信機16から入力を受信するコンピュータ42、一時的、或いは永久的にコンピュータ42に記憶される基準受信機GPSソフトウェア44、標準コンピュータモニタースクリーン46、及びコンピュータに接続されてディジタルデータストリームを送ることのできるディジタルトランシーバタイプラジオ48とを含んでいる。例示した実施例において、ベース基準受信機16は、高精度なキネマティックGPS受信機である。コンピュータ42は、例えばハードドライブ、8メガバイトRAM、2つの連続した伝達ポート、プリンタポート、外部モニターポート、外部キーボードポートを備えた486DXコンピュータであり、モニタースクリーン46は、受動マトリックスカラーLCDであり、ラジオ48は、商業的に入手可能なディジタルデータトランシーバーである。
位置モジュール50は、整合キネマティックGPS受信機18と、この受信機18から入力を受信する整合コンピュータ52と、このコンピュータ52に永久的、或いは一時的に記憶されるキネマテックGPSソフトウェア54と、標準コンピューターモニタースクリーン56及びベース基準標準モージュール40においてラジオ48からの信号を受信する整合トランシーバタイプディジタルラジオ58とからなる。例示した実施例において、位置モジュール50は、マシンとともに作業場所上を動くように地形変更マシン上に配置されている。
図示した実施例においてマシンを処理する更新/制御モジュール60は、位置モジュール50から入力を受信する別のコンピュータ62、コンピュータメモリーにディジタル的に記憶されたりロードされた、1個か、それ以上のディジタル化された場所モデル64と、コンピュータ62のメモリーに記憶されたりロードーされるダイナミックデータベース更新モジュール66、及び、コンピュータに接続されたカラーオペレータディスプレイスクリーン22を含んでいる。代わりに、或いは更にオペレータディスプレイ22、自動マシン制御70がコンピュータに接続されて公知の方法で自発的、或いは半自発的な方法でマシンを操作する信号を受信する。
更新/制御モジュール60は、ここではモービルマシンに取りつけられて、示されているが、いくつかの或いは全ての部分を離して配置することができる。例えば、コンピュータ62、場所モデル64、及びダイナミックデータベース66は、ラジオデータリンクによって位置モジュール50と、オペレータディスプレイ22或いはマシン制御インターフェイス70に接続することができる。位置と場所の更新情報は、マシンへ或いはマシンから伝えることができ、オペレータや監視者によってマシンのオンとオフを表示したり、用いたりするようになる。
ベース基準ステーション40が作業場所に対して公知の3次元座標の一点で固定される。ベース基準ステーション40は受信機16を介して、GPS衛星位置から位置情報を受信し、基準GPSソフトウェア44を用いて公知の手段で一時的誤差量、即ち補正要素を引き出す。この補正要素は、ベースステーション40からモービルマシン上の位置ステーション50にラジオリンク48、58を介して通信される。或いは、生位置データがラジオリンク48、58を介してベースステーション40から位置ステーション50に伝達されて、コンピュータ52によって処理される。
マシンに取りつけられた受信機18は、衛星位置から位置情報を受取り、キネマティックGPSソフトウェア54は、受信機18からの信号とベース基準40からの補正要素とを組合せ、受信機18の位置と、ベース基準40と2、3センチメートル内の作業場所に対するマシンの位置を決定する。この位置情報は、3次元であり、GPSシステムのサンプリングの速度に従って、ポンイント毎に得ることができる。
更新/制御モジュール60を参照すると、場所のディジカル化されたプラン、或いはモデルがコンピュータ62にロードされると、ダイナミックデータベース66が、実際の場所地形と所望の場所地形との間の差を表す信号を発生し、この差をグラフ的にオペレータディスプレイスンクリーン22に表示する。例えば、プロフィール、又は実際及び所望の場所モデルの平面図はスクリーン22上で組み合わされて、これらの表面間の高さの差が表示される。位置モジュール50から受け取られた位置情報を用いて、データベース66は、場所上のマシンの実際の位置と方向に対応してディスイプレイ22上の実際の場所モデル上に重ねられたマシンのグラフィックアイコンを形成する。
位置モジュール50のサンプリング速度のために、マシンが場所上を動くと、位置座標点間の時間/距離の遅れが生じるので、本発明のダイナミックデータベース66は、差動アルゴリズムを用いてマシンの通路をリアルタイムで決定して更新する。
場所に対するマシンの明確な位置、場所のディジタル化された図、これに対するマシンの進行状態を得て、オペレータは場所上でマシンを動かすことができ、場所の表面上に配置された物理的な目印に頼る必要なく様々な地形変更操作を実施するようになる。オペレータがマシンを場所上に動かすとき、ダイナミックデータベース66は、モジュール50から入ってくる位置情報を読み取り、処理し場所に対するマシンの位置、場所上のマシンの通路、及びマシンの通路によって影響を受けた実際の場所におけるいかなる変化をも全て動的に更新する。この更新された情報は、場所の表示を作り出すのに用いることができ、リアルタイムにおいてマシンの操作を導き、実際の更新された場所地形を所望の場所モデルに一致させるのに用いることができる。
産業上の利用性
図4を参照すると、地形変更マシン10が建設場所12に位置して示されている。図4の例示した実施例において、マシン10は、トラックタイプのトラクターであり、土壌を動かしてその場所で輪郭形成操作を行う。しかしながら、本発明の原理と適用性は、モービル工具、或いは作業場所の上、或いは中を動いて、いくつかの形態で場所の地形を変更させる能力を備えたマシンに適合できることがわかるであろう。
マシン10には、公知のように、概略的に24で示された油圧式、或いは電気油圧式工具制御が設けられている。図4のトラクタの輪郭形成の実施例においてこれらの制御は、とりわけプッシュアーム26、先端/ピッチシリンダー28、及びリフトシリンダー30を操作し、所望の掘削、土埋め及び搬送操作の3次元においてブレード32を動かすようにする。
マシン10には、マシン又は場所変更工具32の位置を高精度に決定できる位置決めシステムが設けられており、図4の実施例においては、位相差GPS受信機18が、トラックの場所接触部分に対して、固定された既知の座標でマシン上に配置される。図3に示されているように、マシンに取り付けられた受信機18は、GPS星座14から位置信号を受信し、ベース基準16からラジオリンク48、58を介して誤差/補正信号を受信する。マシンに取りつけられた受信機18は、衛星信号とベース基準16からの誤差/補正信号の双方を用いて、正確に3次元空間における位置を決定する。或いは、生位置データは、ベース基準16から伝達されて、マシンに取りつけられた受信機システムによって公知の方法で処理されて同様の結果を得ることができる。キネマチックGPSと本発明に用いるのに適したシステムの情報が、例えば米国特許第4、812、991号、米国特許4、963、889号に開示されている。キネマチックGPS、或いは外部参照からの他の適当な3次元位置信号を用いて、受信機18とマシン10の位置は、マシン10が場所12上を動くときに2、3センチメートルの範囲内のポイント毎に精密に判定される。例示した位置システムを用いる座標点の本発明のサンプリング速度は、ほぼ1秒につき一点である。
ベース受信機16の座標は、GPS位置決め、或いは従来の測量のようないかなる方法においても決定することができる。本国と他国においてGPS基準を空港のような国家的に測量される固定された場所に配置するような段階がとられている。場所12がこのような国家的に測量される場所と局地GPS受信機のような範囲(現在ほぼ32180mm(20マイル))内である場合には、この局地受信機はベース基準として用いられる。任意的に、三脚に取りつけられたGPS受信機を有する、16のような携帯式受信機と再伝達送信機を用いることができる。携帯式受信機16は、前述したように場所12に、或いは近くの場所で測量される。
ダイナミックデータベースとカラーグラフィックオペレータディスプレイ22を含む搭載型ディジタルコンピュータ20が図4のトラクター上に概略図で示されている。コンピュータ20は受信機18に接続されており、連続してマシン位置情報を受信する。コンピュータ20、ダイナミックデータベース、及びオペレータディスプレイ20をトラクター10上に配置する必要はないが、このことは、現在好ましい実施例であり、図示を簡単にする。
図5Aと図5Bを参照すると、場所12が、まず測量されて、平面図で、元の場所のトポグラフィー上に重ねられた設計者が仕上げた場所のプランを表す、詳細な地形測量青写真(図示せず)を形成する。光学的測量と他の技術で、埋め立地、採鉱所あるいは建設場所のような、地形的青写真、或いはトポグラフィー青写真を作り出すことは公知の技術である。基準点が場所上のグリッド上にプロットされ、結合されたり或いは書き込まれて、青写真上の場所の輪郭を形成する。基準点が多くとられるほど、地図はより詳細になる。
地形のディジタル化された2次元か、3次元のマップを作りだすためにシステムとソフトウェアが現在では入手可能である。例えば、設計者の青写真は、図5Aの36で示されているような元の場所の地形、或いはトポグラフィーの3次元ディジタル化されたモデルと図5Bの38で見られるような所望の場所モデルの3次元にディジタル化されたモデルに変換することができる。場所の輪郭は、公知の方法で、均一グリッド要素37からなる標準グリッドで重ねられる。ディジタル化された場所プランは、重ねられて、様々な角度から(例えばプロフィールと平面)二次元或いは三次元で見ることができ、カラーコード化されて、例えば土壌を再び動かしたり、土壌を加えたり或いは単にそのままにしておくことによって機械が作業しなければならない場所の領域を決定する。入手可能なソフトウェアは、機械で作業される、即ち動かされるのに必要とされる土壌量を推定し、費用の概算を計算し、様々な場所特性を認識し土地の上と中の障害物を認識することができる。
しかしながら、場所12は測量され、マシンのオペレータと監督者が、青写真の紙、或いはディジカル化された場所プランのいずれかによって、作業しているとしても、最初に行うことは、マシンオペレータのために目印で指示する状態で場所の様々な輪郭、或いは基準点に物理的に杭で目印をつけることである。基準に対して杭と目印を用いると、オペレータは、どこをそれだけ掘り、土盛りし、搬送、或いは元の地形、或いはトポグラフィーを形成したり、変更したりして最終場所プランを達成することを目でみて感じることによって推定しなければならない。周期的に、この過程の間、オペレータの進行状況は手でチェックされて、最終的な輪郭に到達するまで静止的な一段階ずつの方法において輪郭形成操作と一致させる。この手動の周期的更新及びチェックは、重労働であり、時間を消費し、本質的に理想的な結果を出すことが少なくなる。
更に日付と仕事の進行状況を表すインジケータとして、青写真、或いはディジタル化された場所モデルを修正することが望まれる場合には、その場所は、再び静止的に測量されて、青写真、或いはディジタル化された場所モデルを非リアルタイムで場所のずれを手で補正しなければならない。
従来の静止測量及び更新方法の欠点を除去するために、本発明は、リアルタイムでの監視と場所12とマシン10の制御のために動的に更新されたデータベースとオペレータディスプレイを正確な3次元位置とディジタル化された場所マッピングと結合する。場所ダイナミックデータベースは、実際と所望の場所モデル地形測量との差を判定し、マシン10の場所12に対するキネマティックGPS位置情報を位置受信機18から受信し、場所モデルと現在のマシン位置の双方をオペレータに対してディスプレイ22上に表示し、センチメートルで計測される程度の正確さで実際の場所モデル地形、機械位置、及び表示をリアルタイムで更新する。このようにオペレータは、リアルタイムで場所上での地面移動の前例のない知識と制御を達成し、場所をチェックしたり再び測量するという障害、或いは必要性なく仕事を終了できる。
図6A乃至6Dを参照すると、スクリーン22上のマシンオペレータに役に立つ複数の例示的な表示が図4の地形測量形成の用途のために示されている。図6A乃至図6Dの図示した実施例は、トラクタに取り付けられたブレードを備えた地面形成操作のためのオペレータディスプレイを示しており、実質的にいかなる種類の地面形成、或いは地形変更操作及びマシンに対応するディスプレイを本発明に設けることができることが当業者に明白であろう。
図6Aと図6Bを参照すると、スクリンーン22上のオペレータディスプレイの第一実施例は、主な構成要素として、実際の地形測量に対する所望の最終的輪郭、或いは場所12の平面(或いはこれの一部分)を表す平面ウインドー70内の3次元ディジタル化された場所モデルを有する。カラーコード化、或いは同様の可視できる印が、土壌が取り除かれるべき領域、土壌が加えられる領域及び最終場所モデルとすでに同一となった領域を表すのに用いられるので、実際の場所トポグラフィーと所望の場所モデルとの間の差が実際のスクリーンディスプレイ70上でより簡単にわかる。
図6Bにおいて、場所平面ウィンドー70が2次元平面図を示しており、マシンがその場所に対して異なる位置にあるという点を除けば、オペレータディスプレイ22は、図6Aと同じである。ウィンドー70において表示された場所の異なるように陰影がつけられたり、交差区画された領域は、実際のトポグラフィーと所望の場所トポグラフィーの変化の差をグラフ的に表す。
オペレータディスプレイスクリーン22は、水平の座標スクリーンウィンドー即ちディスプレイ72をスクリーンの上部に含んでおり、ベース基準16に対して3次元におけるオペレータの位置を表す。粗い解像側部スケール74と細かい解像側部スケール75は、目標輪郭の高さからの高さ偏差、即ち、X軸偏差を表し、どれだけトラクタブレード32がその位置で掘ったり、或いは土盛りすべきかを知らせる。右側の粗いインジケータ74は、目標高さの上下30.4センチメートル(1.0フート)の段階的な目盛りがつけられて高さを表す。ディスプレイの左側の細かい解像側部バー75は、3.04センチメートル(0.1フート)の段階的な目盛りを表しており、オペレータが目標輪郭の30.4センチメートル(1フート)、或いは、それ以下の範囲内であるときに便宜的な基準となる。ディスプレイソフトウェア内のズーム、或いは自動計測特性を用いて、スケール74、75は、オペレータが目標のトポグラフィーにに近づくにつれてより小さい段階的増分に変更することができる。
このディスプレイの段階的な増分と本発明のシステムと方法に用いられた計測の単位は、使用者の希望によってメートル法(メーター、センチメートル等)とすることができるし、或いはメートル法でなくてもよい。
更に基準が、スクリーン22の底部におけるプロフィールウィンドー76においてマシンオペレータに与えられる。プロフィールウィンドー76は実際の場所トポグラフィー76aと所望のトポグラフィー76bとの間の高さの差をマシンの通路とマシンのすぐ後方において示している。プロフィールディスプレイ76の左側の高さスケール78は、どれだけ深く掘るか、或いはどれだけの土壌を与えられた場所に加えるかということを更に示しており、プロフィールディスプレイ76の底部における水平スケール79はトラクター/ブレードの前の距離を示しており、そこではオペレーターは所定の実際のトポグラフィーと所望のトポグラフィーとの差を得る。この方法において、オペレータは同時に、目的の輪郭を得る際に、最も新しい通路の新しい地形と正確さをモニターする。
トラクターブレードアイコン82が平面ウィンドー70、プロイールウィンドー76、及び適当な側部スケール74、75上に重ねられた時、場所12におけるトラクターの位置がスクリーン22上にグラフ的に表示される。場所平面ウィンドー70において、アイコン82には、前方突出方向性インジケータ84が設けられており、進行方向におけるトラクター前方の所定距離に地形を一致させるようになる。プロフィールウィンドー76内のトラクターアイコン82の前方に示された予想地形は、方向性インジケータ84によってカバーされた場所12の部分に対応する。6Aと6Bにおいて、ウィンドー70、74、75におけるアイコン82はその場所に対するマシンの現在の位置に応答して動き、同時にプロフィールウィンドー76内のアイコン82は、場所のトポグラフィープロフィール76a、76bがマシンの動きに従ってアイコンを通って渦巻き状になる間、中央のままである。
詳細な位置、方向及び目標輪郭情報がオペレータに対してディスプレイ22を介して与えられた状態で、センチメートルの正確さの制御が、地面移動操作の間維持される。また、オペレータは、所望のトポグラフィーを達成するように、全場所の完全で、新しい、リアルタイムのディスプレイと日付けの進行を有し、所望の地形測量を達成する。一日の終了時に、データベース内のディジタル化された場所モデルが完全に更新され、オペレータが停止したり、或いは次の分析のためにオフロードしたところで開始するために、次の日に検索できるよう簡単に記憶できる。
図6Cと6Dを参照して、わずかに異なるオペレータのディスイプレイが与えられており、場所輪郭の概略的平面ウインドー88、ブレード前方プロフィールウィンドー89、及び異なるトラクター/ブレードアイコン82を用いる、大型スケール上のプロフィールウィンドー76とを有する。ブレード前方プロフィールウィンドー89は、左右ブレードエッジ高さ側部バー89a、89bを備え、角度がつけられた切断或いは角度がつけられた地形上の切断のためにブレードを回転的に整列させる。図6Dのディスプレイは、トラクター操作上の異なる斜視図のために側部プロフィール図76が90゜回転しているという点を除いて、図6Cと同じである。図6Cと図6Dを、様々な地形変更を用途のために本発明の原理の順応性と適用性を理解するために、最初に示す。
トラクターの輪郭適用の図示した実施例においてマシンに取り付けられた位置受信機18は、トラクター10のカブ上に、トラクター式トラックの地面との接触位置の底部から所定の既知の距離離れて配置されている。トラックは、実際は場所のトポフラフィーと接触しているので、受信機18は、高さの差を考慮して目盛りがつけられる。実際、カブにとりつけられた受信機18はマシンを操作する場所のトポグラフィーを備えたレベルであるようなシステムによって検知される。
場所に接触するマシンの運び台、即ち接触面から所定距離離れた所で単一の位置受信信機を用いることは、効果的であり、がっしりとした構造であるが、所定の用途においては、位置決めのために異なる取り付け構造を用いることが好ましい。例えば、場所のプランに対するトラクターの現在の方向は、図6Aにおいてアイコン82と方向インジケータ84によるディスプレイ22からわかるようにわずかな時間ラグベクトルによってずれ、受信機18のサンプリング速度と方向変更のマシンの速度に依る。一個のみの位置受信機18をトラクター10に取り付けた状態で、単一点におけるマシンの方向を決定することはできない。何故ならば、マシンは、効果的に単一受信機のまわりを効率良くピボット運動するからである。この問題はマシン上に、方向性基準点のために第一の位置受信機から離れたところでマシン上に第二の位置受信機を配置することによって解決することができる。
更に、図4において、ブレード32と後方に取り付けられたGPS受信機18の間の距離は、ブレードが地面移動操作を行うときにブレードの位置を決定する際に、わずかなリアルタイムの遅れが発生する。殆どの場合、この遅れは無視してもよいものである。何故ならば、GPSの位置はブレード32にかなり近接して後方に続いており、場所のトポグラフィーに対して丁度なされた変更に適合するからである。しかしながら、より大きいマシ上において、1個か、それ以上の位置受信機18aと図4の仮線に示したように掘削用ブレード上に直接取り付けることが好ましい。この構造において、ブレードは、マシンと場所の表面に対して上下に動くので、ブレードの底部と場所の表面の間の距離を計測する装置を形成することが望ましい。例えば、適当な装置は、図4の19で概略的に示されているように、ブレード上に取り付けられた音波近接検知器であり、コンピュータ20の表面上のブレード32の高さを表す信号と、ダイナミックデータベースを表す信号を与えるように接続されている。これらと他の適当な近接検知器が商業的に入手可能である。ダイナミックデータベースは、近接検知器19からの信号を用いて地面に対するブレードに取り付けられたGPS受信器の相対的な位置における変化を比較することができ、ブレードの摩耗を補正し、トラクターが応対するときに生じるブレードリフトを補正することができる。
位置受信器装置をマシン10上に取り付けるときの他の問題は、マシンが、地形変更操作を実施するように個々に動かす用具を支持するかどうかである。制御可能な可動なブレード32を備えたトラクターが良い例である。用具32の地形変更操作にわたる監視と制御の精度を高めるために、多くの場合の位置受信器18の好ましい取り付けの構造は、直接用具32上にある。マシン輪郭形成の用途において例示した、図4Aのブレードに取り付けられた二重受信器構造は、場所に対する変更がなされる点上に直接配置されるだけではなく、2つの受信機18は、マシンが方向を変更するときにマシンに対して方向性基準を与え、さらに図6Cと図6Dの89に示されているように左右のブレード角の測定の位置情報を与える。
図7Aを参照するとマシン輪郭形成操作に対するダイナミックデーターベース66の操作段階が概略的に示されている。システムは、コンピュータの操作システムから300で開始される。ディスプレイスクリーンのグラフは302で初期化される。初期場所データーベース(ディジタル化された場所プランは、プログラム指令におけるファイルから読み取られ、場所プランと実際及び目標の地形測量が段階304でディスプレイ上に出される。ディスプレイ22からの側部バーの段階的インジケータが段階306で設定され、モジュール40、50、60(図3参照)の間の様々な連続したルーチンが段階308で初期化される。段階310で、システムは、このシステムを停止するためのユーザーの要求をチェックする。例えば一日の終了時に、あるいは食事休憩のとき、あるいはシフトの変更のときである。段階310で終了させるためのユーザーの要求は、公知のユーザーインターフェイス、例えばコンピュータキーボード、或いは同様のコンピュータ入力装置で開始することができ、コンピュータ62と連結されている。
次に、マシンの3次元位置が段階312で、図3における位置モジュール50と制御/更新モジュール60の間の連続したポート接続から読み取られる。段階314で、マシンGPS位置は、ディジタル化された場所プランの座標システムに変換されて、これらの座標は段階316でスクリーン22上のウィンドー72内にディスプレイされる。
段階318において、マシンの通路が平面図及びプロフィール図の双方において決定され、リタルタイムで更新されてマシンが操作された場所プランのグリッドの部分を表す。マシンの輪郭形成の実施において、マシン通路の幅はマシンがその場所上を通るときにその地形変更用具(トラクターブレード32)に一致する。ブレード32が通る精密なグリッド四辺形の判定ではオペラータの位置と、ダイナミック場所プラン上での作業のリアルタイムで更新を行うことができる。ディジタル化された場所プランのグリッド要素の大きさは固定され、いくつかのグリッド要素の幅はマシン(即ちトラクターのブレード)の幅に等しく一致するが、ブレードは常に完全にマシンが通る特定のグリッド要素をカバーするとは限らない。マシン/用具の幅がグリッド要素の幅の正確な倍数であるできでも、通路内において各要素を完全にカバーするようにグリッド要素と整列する方向にマシンが進行することは稀である。
この問題を改善するために、図7B乃至図7Cにおいて段階318のサブルーチンは、場所プラングリッドに対するマシン(ここではトラクターのブレード32)の作動部分の通路を判定する。図7Bのステップ31において、モジュールはマシンに取り付けられた受信機の位置が場所おに対して長手に、即ち縦方向に(〔X、Y、Z〕座標システムにおけるX又はY方向に)変更したかどうかを判定する。もしそうである場合には、段階320でのシステムは、これが第一のシステムループであるかどうかを判定する。現在のループが第一のループでない場合には、先のループから判定されてディスプレイされたマシン通路が、現在のループを更新するために段階322で取り除かれる。現在のループが第一のループである場合には、段階322は単にバイパスされて、消去するためにマシン通路のヒストリがなくなるようにする。
段階324において、トラクターアイコンが、最初に引き出される。既に引き出されている場合には、トラクターアイコンは、段階326で場所モデルプラン上の先の位置から消去される。段階328において、システムはマシンの現在の位置の座標が、マシンが最後のシステムループに占有されたグリッド要素の外側にあるかどうかを判定する。
段階328において、マシンの位置が変更されなかった場合には、例えばブルドーザが駐車したり、あるいはアイドリングする場合には、システムは段階336−344に進む。
段階328において場所プラングリッドに対するマシンの位置が変更した場合には、システムは段階330にまで進み、ここで実際のブレードの端部から中央寄りにある有効なトラクターブレードの端部を決定する。図示した実施例において、有効なブレード端部は、グリッド要素の幅の約1/2の距離で実際の端部から中央寄りになった差動アルゴリズムによって認識される。例えば、実際のブルドーザブレード32の長さは304.8センチメートル(10.0フート)であり、60.96センチメートル(2.0フート)×60.96センチメートル(2.0フート)のグリッド要素5個に対応する。ブレード端部の有効な端部は、段階330で各実際の端部の中央寄り30.04センチメートル(1フート)だけ計算される。有効(実際ではない)ブレード端部は、ディジタル化された場所モデル上のグリッド要素のいかなる部分上に接触したり通過するならば、グリッド要素は読み取られて、マシンによって変更されたように差動アルゴリズムによって処理される。何故ならば、そのグリッド要素の少なくとも1/2がブレードによって実際通過したからである。もちろん、ブレード端部のオフセットの程度は、ブレードがグリッド要素を通過したかどうかをを判定する際に、グリッド要素の大きさと誤差の所望のマージンによって変化することができるからである。例えば、図示した実施例のより小さい有効パラメータが好ましいが、実際の用具パラメータに有効用具パラメータを設定することが可能である。
このブレード配置方法は、マシンの連続した部分の通路を判定したり、あるいは場所モデルのグリッド要素を通過する用具の通路を判定することが望まれる、いかなる地形変更操作にも適合することがわかる。
段階332においてシステムは、ブレードが、最後のシステムループから動いたかどうか判定する。ブレードが動いた場合には、システムは、段階334に進み、図7Dを参照して以下にさらに詳細に述べるような方法で場所プラングリッドにわたってブレードのリアルタイム通路を判定する。段階332において、ブレードは、最後のシステムループから移動しなかった場合には、システムは段階334をバイパスする。段階336においてシステムは、上記の判定されたマシン通路情報を用いて、マシンのアイコン位置と配向を計算する。段階338において、この情報は、現在、或いは実際の場所地形と所望の地形プロフィールを判定するのに用いられる。段階340においてこれらのプロフィールは、プロフィールィンドー76においてオペレータディスプレイ22上にディスプレイされる。段階342において、次にシステムは平面ウィンドー70上にマシンアイコンを引き出し、段階344において、先に消去されたマシン通路ヒストリは、再び引き出されて、最も新しいマシンの動きとマシンの通路における場所変更を示す。
段階318のサブルーチンの段階319に戻ってみると、最後の計測、マシン位置からマシン位置における顕著な変化がない場合には、トラック及び更新段階320乃至344がバイパスされ、システムは、図7Aにおける段階318のサブルーチンから段階346に澄む。
図7Aにおいて段階346、348において、ディスプレイ上の粗い目盛りと細かい目盛りのインジケータが更新されて、システムはループを完全にして段階310に戻る。
段階310において、その選択は、オペレータが上述のようなシステムを、例えば一日の終了時に又は昼食のときに停止するのに役立つ。オペレータは段階310でシステムを停止させることを選択する場合には、システムは、現在のデータベースがシステムコンピュータ、例えば永久ディスク又は、取り外し可能ディスク内の適当なディジタル記録媒体上のファイルに記録された段階350に進む。段階352において、作動モジュールの操作が終了して、段階354においてオペレータがコンピュータ操作システムに戻す。オペレータがシステムを停止しない場合には、連続した位置の読み取りが位置モジュール50と受信器18に接続された連続ポートから取られる段階312に戻り、システムループを繰り返す。
図7Cにおける段階334のサブルーチンは、マシン通路を更新し、現在の場所プランが図7Dにより詳細に示されている。段階330のアルゴリズムは、マシン或いは用具の幅とマシン或いは用具が完全に通過したグリッド要素の数との間で完全に一致しないことを補正するが、マシン/用具がGPS位置の読み取りの間でなされるその距離と方向の変化によてマシンの進行の一部分のリアルタイムの更新情報が欠乏することになる。このことは、マシンの進行速度が場所プランのグリッド要素に対して高い場合に、特にひどい。例えば、グリッド要素が1平方メートルで、位置システムのサンプリング速度が1秒につき1座標サンプルである場合に、18キロメータ/一時間でのマシンの進行は、位置サンプリング間のほぼ5メートルか、5グリッド平方だけ進む。従ってマシンによってカバーされた5グリッド平方のうち少なくとも中間の3個に監視のリアルタイムの情報がない。
この問題を解決するために、“多角形内書き込み”アルゴリズムが段階334において用いられて、座標サンプリング間においてマシンによって通過した通路を推定する。図7Dにおいて、段階334aでのアルゴリズムは、位置(x1、y2)と(x2、y1)と座標位置(x0、y0)でのブルドーザブレードの有効端部によって形成された場所プラングリッド表面上に長方形を配置する。段階334bと334c及び334fにおいて、検索アルゴリズムは、即ち、有効な端部の間でブレードが通過したグリッド要素である2つのブレード位置の間で形成された多角形内にグリッド要素のために長方形境界内を検索する。
段階334dと334eにおいて、これらの新しく通過されたグリッド要素は塗られて、影をつけられ、印がつけられたり、あるいは更新されてオペレータにグリッド要素に対して目標高さを越えているか、下か、或いはその上であるかどうかを知らせる。段階334dにおいて、地面の高さ、即ちグリッド要素のz軸座標が座標(x2、y2)において更新される。段階334eにおいて、目標の高さよりも大きい現在の高さによって高さ要素は、例えば赤になる。目標高さに等しい現在の高さによって高さ要素は、例えば、黄色になる。目標高さよりも小さい現在の高さによって高さ要素は、例えば青になる。オペレータディスプレイ22上において、更新は、色付けされた、或いは視覚的に更新された、マシン/用具アイコン82の後方のグリッド要素が通過した区画として表れて、掘削或いは輪郭形成が目標輪郭に、またはその上に、或いはその下であるかどうかを知らせる。一例が図6Bの異なるように影がつけられた領域によって示されている。目標輪郭がその領域にあっていない場合には、オペレータは、後方を通ったり、或いは次に通過するときに補正することができる。ブルドーザアイコンが通過してペイントされた区画は、色の変化、あるいは同様の視覚的更新ができるように連続した通路内に充分に変更できるまで、例えば、実際の場所上のマシンの高さ座標が、グリッド要素上の所望の場所モデルの高さ座標とより一致するようになるまで、オペレータのディスプレイスクリーン22上に残ったままである。
図7A乃至図7Dの図示した実施例のシステムと方法は、リアルタイムのマシン位置と更新情報を視覚的オペレータディスプレイを介して与えられ、マシン位置と場所更新情報を表して発生した信号は、例えば電気油圧装置、又は用具制御システムのような公知の自動マシン制御を操作するように視覚的ではない方法に用いることができる。
図8を参照すると、本発明に係るシステムが、一個か、それ以上のマシン、或いは用具操作システムの閉じたループ自動制御に対して概略的に示されている。図8の実施例は、上述したように補助的なオペレータディスプレイを用いて、或いは用いることなく使用することができ、図示のために自動マシン制御のみを示す。本発明のダイナミックデーターベースのアルゴリズムを含む、適当なディジタル処理設備、例えば前述の実施例において記載したようなコンピュータが400で示されている。ダイナミックデーターベース400は、GPS受信機システム410から3次元の瞬間的な位置情報を受信する。所望のディジタル化された場所モデル420は、適当な方法、例えば適当なディスクメモリー上にコンピュータ400のデーターベース内にロードされたり記憶される。自動マシン制御モジュール470は、例えば地形変更機械上の操縦システム474、用具システム476及び駆動システム478を操作するように接続されている。自動マシン制御472は、実際の場所モデル430と所望の場所モデル420との間の差を表すコンピュータ400内のダイナミックデーターベースから信号を受信でき、マシンの操縦、用具及び駆動システムを操作して実際の場所モデルを所望の場所モデルに一致させるようにする。自動マシン制御472は、マシンの様々な操縦、用具及び駆動システムを操作し、マシンの場所、現在の位置と方向に対してなされた変更が受け取られて、読み取られ、400でダイナミックデーターベースによって処理され、実際の場所モデルを更新する。この実際の場所の更新された情報がデーターベース400によって受け取られ、マシン制御472に伝達された信号をそれに対応して更新し、マシンが場所内を進行するときに、マシンの操縦、用具及び駆動システムを操作して実際の場所モデルを所望の場所モデルと一致させるようにする。
発明の方法とシステムが容易に地形変更、マシン操作或いは測量操作のほぼ全てに適用でき、マシンが作業場所の上を或いは中を通り、場所の地形をリアルタイムでモニターしたり、或いは場所地形に対する変更に効果を与えるようになることが、当業者には明白である。図示した実施例によって本発明の広い原理の理解が与えられ、好ましい用途を詳細に開示し、限定するものでない。本発明の他の変更、或いは用途が請求の範囲の範囲内においてなされこの範囲内にある。
Claims (80)
- モービル地形変更マシン(10)の作動を指示するための装置において、
(a)場所の所望の地形を表す第一の三次元地形場所モデル(104)と、前記場所の実際の地形を表す第二の三次元地形場所モデル(106)とを記憶するためのディジタル的なデータ記憶及び検索手段(126)と、
(b)マシン(10)が場所(12)を通過するとき、三次元空間内における前記マシン(10)の少なくとも一部分の瞬間的な位置をリアルタイムで表すディジタル信号を発生する手段(120)と、
(c)前記信号を受信し、該信号に従って第二の前記場所モデル(106)を更新する手段と、
(d)第一の前記モデルと第二の前記モデルとの間の差をリアルタイムで判定し、更新する手段と、
(e)前記差に従って前記マシン(10)の作動を指示して、更新された前記第二モデルを前記第一モデルに一致させるようにする手段(128)と、
を備えた装置。 - 前記ディジタル信号を発生する前記手段(120)は、GPS受信機(16、18)を含んでいることを特徴とする請求項1に記載の装置。
- 前記ディジタル信号を発生する前記手段(120)は、前記マシン(10)上に支持されていることを特徴とする請求項1に記載の装置。
- 前記マシン(10)は、前記場所地形を変更するための前記マシン(10)に対して可動な用具(32)を含んでおり、ディジタル信号を発生する前記手段(120)は前記用具(32)上に取り付けられていることを特徴とする請求項3に記載の装置。
- 前記場所(12)の表面に対する前記用具(32)の高さを定める前記マシン上の手段(18)を含んでいることを特徴とする請求項4に記載の装置。
- 前記マシン(10)の前記作動を指示するための前記手段(128)は、オペレータディスプレイ(22)を含んでいることを特徴とする請求項1に記載の装置。
- 前記オペレータディスプレイ(108)は、前記第一及び第二の前記場所モデル(104、106)及びこれらの間の差の平面図とプロフィール図を含んでいることを特徴とする請求項6に記載の装置。
- 前記オペレータディスプレイ(108)は、第一及び第二の前記場所モデル(104、106)とこれらの間の差の平面図を含んでいることを特徴とする請求項6に記載の装置。
- 前記オペレータディスプレイ(108)は、第一及び第二の前記場所モデル(104、106)とこれらの間の差のプロフィール図を含んでいることを特徴とする請求項6に記載の装置。
- 前記オペレータディスプレイ(108)は、前記場所モデル(104、106)に対する前記モービルマシン(10)の位置のリアルタイムディスプレイを含んでいることを特徴とする請求項7に記載の装置。
- 前記オペレータディスプレイ(108)は、前記モービルマシン(10)の前記位置における第一及び第二の前記場所モデル(104、106)間の差のリアルタイムでの粗いインジケータと細かいインジケータを含んでいることを特徴とする請求項10に記載の装置。
- 前記オペレータディスプレイ(108)は、前記モービルマシン(10)上に支持されていることを特徴とする請求項6に記載の装置。
- 前記オペレータディスプレイ(108)は、前記モービルマシン(10)から離れて配置されていることを特徴とする請求項6に記載の装置。
- 前記ディジタル信号を受信し、前記第二の場所モデルを更新する前記手段と第一及び第二の前記場所モデルの間の差を判定する前記手段が前記マシン(10)上に配置されていることを特徴とする請求項1に記載の装置。
- 前記ディジタル信号を受信し、前記第二の場所モデルを更新する前記手段と前記第一及び第二の場所モデルの間の差を判定する前記手段が前記マシン(10)から離れて配置されていることを特徴とする請求項1に記載の装置。
- 前記マシンの作動を指示するための前記手段(128)は、前記マシン(10)上の1個か、それ以上の操作システムを付勢するように接続された閉ループの自動制御手段を含んでいることを特徴とする請求項1に記載の装置。
- 前記マシン(10)は、場所輪郭形成装置を備えており、前記第一の場所モデル(104)は、前記所望の場所地形の静止三次元モデルを備えており、前記第一及び第二の場所モデル(104、106)の間の前記差は、前記実際の場所地形と前記所望の場所地形間の前記高さの差を含むことを特徴とする請求項1に記載の装置。
- 前記場所(12)に対する前記マシン(10)径路を位置読み取り値によってリアルタイムで決定するための差動手段を含んでいることを特徴とする請求項1に記載の装置。
- 前記差動手段(124)は、前記マシン(10)の地形変更部分の有効幅を実際の幅に等しいか、それ以下の大きさに定める手段を含んでいることを特徴とする請求項18に記載の装置。
- 前記差動手段(124)は、位置読み取りの間に、前記マシンの前記地形変更部分が通過した前記場所(12)の領域を判定する手段(62)と、前記地形変更部分の前記有効幅によって変更された前記第二場所モデル(106)の領域を更新する手段(62)とを含んでいることを特徴とする請求項19に記載の装置。
- モービル地形変更マシン(10)の作動を指示するための方法において、
(a)場所の前記所望の地形を表す第一の三次元地形場所モデル(104)と前記場所の実際の地形を表す第二の三次元地形場所モデル(106)の双方を形成してディジタル的なデータ記憶及び検索手段(126)に記憶し、
(b)前記マシン(10)が前記場所(12)を通過するときに前記マシン(10)の少なくとも一部分の三次元空間内の前記瞬間的な位置をリアルタイムで表す信号を発生させ、
(c)前記信号に従って前記第二の場所モデル(430)を更新し、
(d)第一及び第二の前記場所モデルの間の差を判定して更新し、
(e)該差に従って前記マシン(10)の作動を指示して、前記更新された第二の場所モデル(430)を前記第一の場所モデル(420)に一致させる、
段階からなる方法。 - 前記三次元位置信号は、GPS受信機(16、18)によって発生されることを特徴とする請求項21に記載の方法。
- 前記三次元位置信号は、前記マシン(10)に支持された手段(18)によって発生されることを特徴とする請求項21に記載の方法。
- 前記マシン(10)は、該マシン(10)に対して可動な用具(32)を含んでおり、三次元位置信号は、前記用具(32)に支持された手段の位置に応じて発生されることを特徴とする請求項21に記載の方法。
- 前記用具(32)に、前記場所(12)の表面に対する前記用具(32)の高さを決定するための手段を設けることを特徴とする請求項24に記載の方法。
- 前記第一及び第二の場所モデル(104、106)の間の差に従って前記マシン(10)の作動を指示するための前記段階は、前記第一及び第二の場所モデル(104、106)の間の差のオペレータディスプレイ(108)を形成する段階を含んでいることを特徴とする請求項21に記載の方法。
- 前記第一及び第二の場所モデルの間の前記差を平面図とプロフィール図でディスプレイする段階を含んでいることを特徴とする請求項26に記載の方法。
- 前記第一及び第二の場所モデル(104、106)の間の差を平面図にディスプレイする段階を含んでいることを特徴とする請求項26に記載の方法。
- 前記第一及び第二の場所モデル(104、106)の間の差をプロフィール図でディスプレイする段階を含んでいることを特徴とする請求項26に記載の方法。
- 前記第一及び第二の場所モデル(104、106)に対して前記マシン(10)のリアルタイム位置をディスプレイする段階を含んでいることを特徴とする請求項26に記載の方法。
- 前記オペレータディスプレィ(108)を前記マシン(10)上に形成する段階を含んでいることを特徴とする請求項26に記載の方法。
- 前記オペレータディスプレイ(108)を前記マシン(10)から離して形成することを特徴とする請求項26に記載の方法。
- 前記第二モデル(430)を更新し、前記第一及び第二の場所モデルの間の差を判定する前記段階は、前記マシン上の手段(18)によって行われることを特徴とする請求項21に記載の方法。
- 前記第二モデル(430)を更新し、前記第一及び第二の場所モデルの間の差を判定する前記段階は、前記マシンから離れた手段によってなされることを特徴とする請求項21に記載の方法。
- 前記第一及び第二の場所モデル(104、106)の差に従って前記マシン(10)の作動を指示するための前記段階は、マシンシステムと用具のうちの一つの操作を制御する信号を発生して、前記第二の場所モデル(106)を前記第一の場所モデル(104)に一致させる段階を含んでいることを特徴とする請求項21に記載の方法。
- 前記マシン(10)は、場所輪郭形成マシンであり、前記場所モデル(104)は、前記所望の場所地形の静止三次元モデルを備えており、前記第一及び第二の場所モデルの間の差は、前記実際の場所地形と前記所望の場所地形との間の高さの差として求められることを特徴とする請求項21に記載の方法。
- 前記マシン(10)の位置に従って前記第二の場所モデルを更新する前記段階は、前記場所に対する前記マシン(10)の径路をリアルタイムで、位置読み取り値によって判定する段階を含んでいることを特徴とする請求項21に記載の方法。
- 前記マシン(10)の地形変更部分(32)の有効幅を、実際の幅よりも小さいか、或いは等しい大きさに定める段階を含んでいることを特徴とする請求項21に記載の方法。
- 前記マシン(10)の前記地形変形部分(32)が通過した場所の領域を位置読み取りの間に判定し、前記地形変更部分(32)の前記有効幅が通過した前記第二の場所モデル(106)の領域を更新することを特徴とする請求項38に記載の方法。
- 作業場所の地形と前記作業場所(12)上の操作を正確に監視し制御するシステムにおいて、
前記場所の上か中を通り前記場所の前記地形を変更し、前記場所(12)に対して動くときに三次元において前記マシン(10)の少なくとも一部分の瞬間的な位置をリアルタイムで正確に決定する位置決め手段が設けられたモービルマシン(10)と、
該マシン(10)上で前記位置決め手段に接続されたディジタルデータ記憶設備と、
該ディジタル的なデータ記憶設備に記憶された、所望の場所地形の第一の三次元場所モデル(104)と、前記ディジタルデータ記憶設備(40)に記憶された、前記実際の場所地形の第二の三次元場所モデル(106)と、
前記ディジタルデータ記憶設備(40)と前記位置決め手段(40、50)と連通されており、前記場所(12)に対する前記マシン(10)の位置をリアルタイムで監視し、該マシン(10)が前記場所(12)を通過するとき前記マシン(10)の前記監視された位置に応答してリアルタイムで第二の前記場所モデル(106)を更新し、更に前記第一及び第二の場所モデルの間のリアルタイムで更新された差を表す信号を作り出して、前記マシン(10)の前記操作を導いて前記第二の更新された場所モデル(106)を前記第一場所モデル(104)に一致させるようにすることを特徴とするシステム。 - 前記信号を前記ダイナミックデータベース手段(400)に連通し、前記第一及び第二の場所モデル(104、106)の間の差と前記場所(12)に対する前記マシン(10)の位置をディスプレイするオペレータディスプレイ手段(108)を含んでいることを特徴とする請求項40に記載のシステム。
- 前記オペレータディスプレイ(108)は前記マシン(10)上に配置されていることを特徴とする請求項41に記載のシステム。
- 前記オペレータディスプレイ(108)は、前記マシン(10)から離れて配置されていることを特徴とする請求項41に記載のシステム。
- 前記ダイナミックデータベース手段(400)は前記マシン(10)上に配置されていることを特徴とする請求項40に記載のシステム。
- 前記ダイナミックデータベース手段(400)は前記マシン(10)から離れて配置されていることを特徴とする請求項40に記載のシステム。
- 前記ダイナミックデータベース手段(400)と連通する前記マシン(10)上の自動制御手段を含み、第一及び第二場所モデル(104、106)の間の差を表す信号が前記自動制御手段を作動させて、前記第二の場所モデル(106)を前記第一の場所モデル(104)と一致させようとすることを特徴とする請求項40に記載のシステム。
- 前記位置決め手段はGPS受信機(16、18)を備えていることを特徴とする請求項40に記載のシステム。
- 前記位置決め手段は、前記場所の表面に接触する前記マシン(10)の一部分に対して既知の位置で前記マシン(10)上に取り付けられていることを特徴とする請求項40に記載のシステム。
- 前記マシン(10)は、該マシン(10)に対して移動して前記場所(12)を変更する用具(32)を含んでおり、前記位置決め手段は前記用具(32)にとともに動くように取りつけられていることを特徴とする請求項40に記載のシステム。
- 前記用具(32)には、前記場所の表面に対する前記用具(32)の高さを判断する近接検知手段(19)が設けられていることを特徴とする請求項49に記載のシステム。
- 前記マシン(10)には、該マシン(10)上で離れた第一及び第二の場所に配置された位置決め手段(18)が設けられており、前記第二場所に配置された前記位置決め手段(18)は、前記第一場所に配置された前記位置決め手段(18)に対して方向基準を与えることを特徴とする請求項40に記載のシステム。
- 前記ダイナミックデータベース(400)は、前記場所に対する前記マシン(10)の径路をリアルタイムで位置読み取り値によって決定する差動手段(124)を含んでいることを特徴とする請求項40に記載のシステム。
- 前記マシン(10)は、連続した幅の地形変更部分(32)を有しており、前記ダイナミックデータベース手段(400)は、前記地形変更部分(32)の有効幅を実際の幅よりも小さいか、或いは等しい大きさに定める手段(124)を含んでいることを特徴とする請求項52に記載のシステム。
- 前記差動手段(124)は、前記マシン(10)の前記地形変更部分(32)が通過した径路を位置読み取り値として判定する多角形書き込みアルゴリムを含んでいることを特徴とする請求項53に記載のシステム。
- 前記ダイナミックデータベース(400)手段は、前記マシン(10)の前記地形変更部分(32)が通過した前記第二の場所モデルの領域を更新する手段(62)を含んでいることを特徴とする請求項54に記載のシステム。
- 場所の上のモービル地形変更マシン(10)の径路をリアルタイムで決定する方法において、
単位面積からなる連続したマトリックスに小区分された場所の地形のモデルを形成し、
モービルマシン(10)に、該マシン(10)が前記場所(12)を通過するときに三次元区間内における前記マシン(10)の少なくとも一部分の位置を決定する手段(40、50)を設け、
該マシン(10)が前記場所(12)を通過する間、前記場所モデル(104、106)上の一連の座標点として前記マシン(10)の位置をたどり、
前記場所モデル(104、106)の前記単位面積に対して前記マシン(10)の作動部分(32)の物理的パラメータを決定し、
前記場所(12)に対する前記マシン(10)の径路を、座標点の間で前記マシン(10)の前記作動部分(32)が通過した場所モデル(104、106)の前記単位面積からなるものとしてリアルタイムで決定する、
段階からなる方法。 - 前記マシン(10)の前記作動部分の前記パラメータは、実際のパラメータよりも小さいか、或いは等しい有効パラメータとして決定され、前記場所モデル(104、106)上に表された、前記場所(12)上の前記マシン(10)の径路が前記作動部分(32)の前記有効パラメータの径路によって決定されることを特徴とする請求項56に記載の方法。
- 前記マシン(10)の前記作動部分(32)の前記有効パラメータを決定する前記段階は、前記作動部分(32)の有効幅を実際の幅よりも小さく決定する段階を含んでいることを特徴とする請求項57に記載の方法。
- 前記有効幅は、前記場所モデル(104、106)上の一つの単位面積の前記幅の小部分に対応する距離だけ各実際の端部から離れて、前記マシン(10)の前記作動部分(32)の各有効端部を配置することによって決定されることを特徴とする請求項58に記載の方法。
- 前記マシン(10)の前記作動部分は、連続した幅の地面輪郭形成ブレード(32)を備えていることを特徴とする請求項58に記載の方法。
- 前記マシン(10)の前記作動部分は複数の地形変更部分(32)を備えていることを特徴とする請求項58に記載の方法。
- 前記有効パラメータが通過したと判定される、前記場所モデル(37)の各単位面積からなる地形を更新する段階を含んでいることを特徴とする請求項57に記載の方法。
- 場所(12)上のモービル地形変更マシン(10)の径路をリアルタイムで決定する装置において、
単位面積からなる連続したマトリックスの(37)に区画され、ディジタル記憶設備(126)内に記憶された、場所地形のモデル(36)と、
前記場所(12)を通過するときに、少なくとも一部分の三次元空間における瞬間的な位置を判断する手段(120)が設けられたモービルマシン(10)と、
ディジタル記憶設備(126)と、前記マシン(10)が前記場所(12)を通過する間に、前記場所モデル(104、106)上の一連の座標点として前記マシン(10)の前記瞬間的な位置をたどる位置決め手段(120)とを接続する手段(124)と、
前記場所モデル(104、106)の複数の前記単位面積(37)からなる前記マシン(10)の作動部分(32)の物理的パラメータを決定する手段(470)と、
前記場所(12)に関する前記マシン(10)の径路をリアルタイムで判定する手段(124)と、を備え、
前記径路は、座標点の間で前記マシン(10)の前記作動部分(32)が通過した前記場所モデル(104、106)の前記単位面積(37)からなることを特徴とする装置。 - 前記物理的パラメータを判定する前記手段(470)は、前記マシン(10)の前記作動部分(32)の有効パラメータを実際のパラメータよりも小さいか、或いは等しく定める手段を含んでおり、前記場所モデル(104、106)上に表された前記場所(12)上の前記マシン(10)の前記径路を判断する前記手段(124)は、前記作動部分(32)の前記有効パラメータの前記通路を判断する手段を含んでいることを特徴とする請求項63に記載の装置。
- 前記マシン(10)の前記作動部分(32)の前記有効パラメータは、実際の幅よりも小さい前記作動部分(32)の有効幅を備えていることを特徴とする請求項64に記載の装置。
- 前記有効幅は、前記場所モデル(37)上の一つの単位面積の前記幅の小部分だけ各実際端部から離れた、前記マシン(10)の前記作動部分(32)の有効端部間に形成されていることを特徴とする請求項65に記載の装置。
- 前記マシン(10)の前記作動部分(32)は、連続した幅の地面輪郭形成ブレードを備えていることを特徴とする請求項65に記載の装置。
- 前記マシン(10)の前記作動部分(32)は、連続した幅の複数の地形変更部分を備えていることを特徴とする請求項65に記載の装置。
- 前記有効パラメータが通過したと判定される前記モデル(37)の各単位面積からなる地形を更新する手段を含んでいることを特徴とする請求項64に記載の装置。
- 三次元位置信号と場所のディジタル化されたモデルを用いて、場所に対する三次元空間におけるマシン(10)の位置を正確に判定し、マシン(10)によって場所(12)上でなされる作業の進行状態をディスプレイして、導く手段において、
(a)前記場所(12)を通過するときに、前記マシン(10)の三次元空間における瞬間的な位置をリアルタイムで表す位置信号を受信するマシン(10)を設け
(b)ディジタルデータ記憶設備(126)において単位面積からなる連続したマトリックスに区分された、前記場所(12)の前記実際の地形を表す実際場所モデルと、所望の場所地形の固定三次元モデルからなる所望の場所モデルとを作って記憶し、
(c)実際のパラメータよりも小さいか、等しい有効パラメータからなる、前記マシン(10)の作動部分の前記物理的パラメータを前記場所モデル(430)の単位面積の関数として決定し、
(d)前記マシン(10)が前記場所(12)を通過する間、一連の三次元座標点として前記マシン(10)の前記位置をたどり、
(e)座標点の間で、前記マシンの前記作動部分の有効パラメータが通過した前記単位面積からなる、前記マシンの径路をリアルタイムで決定し、
(f)前記場所(12)上の前記マシン(10)を操作すると同時に、前記場所(12)に対する前記マシン(10)の前記作動部分の前記径路にしたがって、前記記憶設備(126)内の前記実際場所モデルをリアルタイムで更新し、前記実際場所モデルと、前記所望の場所モデルと、前記実際及び所望の場所モデルの間の現在の差と、前記実際及び所望の場所モデルに関する前記マシン(10)の前記位置とを前記マシン(10)のオペレータにリアルタイムでディスプレイする、
段階からなる方法。 - 前記オペレータディスプレイ手段(108)は、前記マシン(10)上に配置されていることを特徴とする請求項70に記載の方法。
- 前記オペレータディスプレイ手段(108)は、前記マシン(10)上に配置されていることを特徴とする請求項70に記載の方法。
- 前記ディジタルデータ記憶設備(126)は、前記マシン(10)上に配置されていることを特徴とする請求項71に記載の方法。
- 前記ディジタルデータ記憶設備(126)は、前記マシン(10)から離れて配置されており、前記更新された場所モデル(37)を表す信号を前記マシン(10)から離れたダイナミックデータベース手段から前記マシン(10)上の前記オペレータディスプレイ手段(108)に伝達し、前記マシンの前記位置を前記ダイナミックデータベース手段に伝達することを特徴とする請求項71に記載の方法。
- 場所のディジタル化されたモデル内の三次元位置信号を用いて、場所に対する三次元空間におけるマシン(10)の位置を正確に判定する装置において、
(a)前記位置信号を受信し、前記場所(12)を通過するときに少なくとも一部分の三次元空間における瞬間的な位置を判定する手段が設けられたモービルマシン(10)と、
(b)ディジタルデータ記憶設備(126)内に記憶された前記場所地形を表す場所モデルと、
(c)前記マシン位置を判定する手段(470)と、前記ディジタルデータ記憶設備(126)とに接続され、前記場所(12)に関する前記マシン(10)の少なくとも一部分の前記三次元位置に従って、前記記憶設備(126)内で場所モデルをリアルタイムで更新する手段(62)を含んだダイナミックデータベース手段(400)と、を備え、
前記場所モデルは、前記場所(12)の前記実際の地形を表す実際の場所モデルであり、所望の場所モデルが前記ディジタル記憶設備(126)内に記憶されており、前記ダイナミックデータベース手段(400)は、前記実際の場所モデルが更新されるときに該前記実際場所モデル(430)と前記所望の場所モデル(420)との間の差をリアルタイムで判断し、位置の読み取りの間前記場所(12)に対する前記マシン(10)の前記径路をリアルタイムで決定する差動手段を含んでおり、さらに前記ダイナミックデータベース手段(400)は、前記マシン(10)の前記作動部分の有効幅を実際の幅よりも小さいか、等しい大きさに決定する手段と、前記マシン(10)の前記作動部分の前記有効幅が通過した前記第二の場所モデル(106)の前記領域を更新する手段とを含んでいることを特徴とする装置。 - 前記マシン(10)のオペレータに対して前記更新された場所モデルを前記マシン(10)のオペレータに対してリアルタイムでディスプレイする手段を含んでいることを特徴とする請求項75に記載の装置。
- 前記オペレータディスプレイ手段(108)は、前記マシン(10)に配置されていることを特徴とする請求項76に記載の装置。
- 前記オペレータディスプレイ手段(108)は、前記マシン(10)から離れて配置されていることを特徴とする請求項76に記載の装置。
- 前記ダイナミックデータベース手段(400)は、前記マシン(10)上に配置されていることを特徴とする請求項77に記載の装置。
- 前記ダイナミックデータベース手段(400)は、前記マシン(10)から離れて配置されており、前記更新された場所モデルを表す信号を、前記マシン(10)から離れた前記ダイナミックデータベース手段(400)から前記マシン(10)上の前記オペレータディスプレイ手段(108)に伝達する手段と、前記マシン(10)の前記位置を前記ダイナミックデータベース(400)に伝達する手段が設けられていることを特徴とする請求項77に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16512693A | 1993-12-08 | 1993-12-08 | |
| US08/165,126 | 1993-12-08 | ||
| PCT/US1994/013143 WO1995016228A1 (en) | 1993-12-08 | 1994-11-18 | Method and apparatus for operating geography-altering machinery relative to a work site |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH08506870A JPH08506870A (ja) | 1996-07-23 |
| JP3645568B2 true JP3645568B2 (ja) | 2005-05-11 |
Family
ID=22597534
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP51619595A Expired - Fee Related JP3645568B2 (ja) | 1993-12-08 | 1994-11-18 | 作業場所に対して地形変更マシンを操作する方法と装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US5631658A (ja) |
| EP (1) | EP0682786B1 (ja) |
| JP (1) | JP3645568B2 (ja) |
| CN (1) | CN1117317A (ja) |
| AU (1) | AU682422B2 (ja) |
| CA (1) | CA2152960A1 (ja) |
| DE (1) | DE69430663T2 (ja) |
| WO (1) | WO1995016228A1 (ja) |
| ZA (1) | ZA948824B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023102447A (ja) * | 2022-01-12 | 2023-07-25 | 株式会社大林組 | 作業支援システム、作業支援方法及び作業支援プログラム |
Families Citing this family (201)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07295619A (ja) * | 1994-04-25 | 1995-11-10 | Mitsubishi Electric Corp | 工作機械の数値制御装置 |
| JPH08263138A (ja) * | 1995-03-24 | 1996-10-11 | Komatsu Ltd | 無人ダンプ走行コースデータ作成方法及び作成装置 |
| AUPN385195A0 (en) * | 1995-06-29 | 1995-07-20 | Hall, David John | A system for monitoring a movement of a vehicle tool |
| GB9518029D0 (en) * | 1995-09-05 | 1995-11-08 | Massey Ferguson Mfg | Tractor with control and information display system |
| JP3118173B2 (ja) | 1995-12-08 | 2000-12-18 | 株式会社熊谷組 | 測地システム |
| US5815826A (en) * | 1996-03-28 | 1998-09-29 | Caterpillar Inc. | Method for determining the productivity of an earth moving machines |
| DE19629618A1 (de) * | 1996-07-23 | 1998-01-29 | Claas Ohg | Routenplanungssystem für landwirtschaftliche Arbeitsfahrzeuge |
| WO1998010310A1 (en) * | 1996-09-06 | 1998-03-12 | Underground Imaging, Inc. | Oblique scanning ground penetrating radar |
| US6195604B1 (en) | 1996-09-09 | 2001-02-27 | Agco Limited | Tractor with monitoring system |
| JP3198403B2 (ja) * | 1996-09-13 | 2001-08-13 | 大成建設株式会社 | 法面仕上げ管理システム |
| JP3218456B2 (ja) | 1996-09-13 | 2001-10-15 | 大成建設株式会社 | 基盤面仕上げ管理システム |
| DE19647523A1 (de) † | 1996-11-16 | 1998-05-20 | Claas Ohg | Landwirtschaftliches Nutzfahrzeug mit einem in seiner Lage und/oder Ausrichtung gegenüber dem Fahrzeug verstellbar angeordneten Bearbeitungsgerät |
| US5902343A (en) * | 1996-11-22 | 1999-05-11 | Case Corporation | Automatic scaling of GPS field maps |
| US5735352A (en) * | 1996-12-17 | 1998-04-07 | Caterpillar Inc. | Method for updating a site database using a triangular irregular network |
| US5761095A (en) * | 1997-03-10 | 1998-06-02 | Rgs, Llc | System for monitoring the depth of snow |
| US5920318A (en) * | 1997-03-26 | 1999-07-06 | Northrop Grumman Corporation | Method and apparatus for localizing an object within a sector of a physical surface |
| US5864060A (en) * | 1997-03-27 | 1999-01-26 | Caterpillar Inc. | Method for monitoring the work cycle of mobile machinery during material removal |
| US5987383C1 (en) * | 1997-04-28 | 2006-06-13 | Trimble Navigation Ltd | Form line following guidance system |
| US6052647A (en) * | 1997-06-20 | 2000-04-18 | Stanford University | Method and system for automatic control of vehicles based on carrier phase differential GPS |
| US5944764A (en) * | 1997-06-23 | 1999-08-31 | Caterpillar Inc. | Method for monitoring the work cycle of earth moving machinery during material removal |
| US5918682A (en) * | 1997-08-11 | 1999-07-06 | Caterpillar Inc. | Method for determining a steering technique for an earth moving machine |
| US5905968A (en) * | 1997-09-12 | 1999-05-18 | Caterpillar Inc. | Method and apparatus for controlling an earthworking implement to preserve a crown on a road surface |
| DE19756676C1 (de) * | 1997-12-19 | 1999-06-02 | Wirtgen Gmbh | Verfahren und Vorrichtung zum Abfräsen von Verkehrsflächen |
| US6076030A (en) * | 1998-10-14 | 2000-06-13 | Carnegie Mellon University | Learning system and method for optimizing control of autonomous earthmoving machinery |
| US6168348B1 (en) * | 1998-01-16 | 2001-01-02 | Southern Laser, Inc. | Bi-directional surface leveling system |
| US6016118A (en) * | 1998-03-05 | 2000-01-18 | Trimble Navigation Limited | Real time integration of a geoid model into surveying activities |
| US6141613A (en) * | 1998-03-18 | 2000-10-31 | Caterpillar Inc. | Apparatus and method for controlling the steering of a tracked machine |
| US6625135B1 (en) * | 1998-05-11 | 2003-09-23 | Cargenie Mellon University | Method and apparatus for incorporating environmental information for mobile communications |
| US5924493A (en) * | 1998-05-12 | 1999-07-20 | Caterpillar Inc. | Cycle planner for an earthmoving machine |
| DE19830858A1 (de) * | 1998-07-10 | 2000-01-13 | Claas Selbstfahr Erntemasch | Vorrichtung und Verfahren zur Bestimmung einer virtuellen Position |
| US6085130A (en) * | 1998-07-22 | 2000-07-04 | Caterpillar Inc. | Method and apparatus for selecting a transition scheme for use in transitioning a mobile machine from a first path to a second path |
| US6112143A (en) * | 1998-08-06 | 2000-08-29 | Caterpillar Inc. | Method and apparatus for establishing a perimeter defining an area to be traversed by a mobile machine |
| US6088644A (en) * | 1998-08-12 | 2000-07-11 | Caterpillar Inc. | Method and apparatus for determining a path to be traversed by a mobile machine |
| US6227761B1 (en) * | 1998-10-27 | 2001-05-08 | Delaware Capital Formation, Inc. | Apparatus and method for three-dimensional contouring |
| US7399139B2 (en) * | 1998-10-27 | 2008-07-15 | Somero Enterprises, Inc. | Apparatus and method for three-dimensional contouring |
| IL126962A (en) | 1998-11-09 | 1999-12-22 | Makor Issues & Rights Ltd | Method and system for optimizing transportation route design |
| US6278955B1 (en) | 1998-12-10 | 2001-08-21 | Caterpillar Inc. | Method for automatically positioning the blade of a motor grader to a memory position |
| US6129156A (en) * | 1998-12-18 | 2000-10-10 | Caterpillar Inc. | Method for automatically moving the blade of a motor grader from a present blade position to a mirror image position |
| US6286606B1 (en) | 1998-12-18 | 2001-09-11 | Caterpillar Inc. | Method and apparatus for controlling a work implement |
| FR2789770B1 (fr) * | 1999-02-12 | 2001-03-23 | Gtm Construction | Procede de realisation utilisant un systeme de positionnement global |
| US6823249B2 (en) | 1999-03-19 | 2004-11-23 | Agco Limited | Tractor with monitoring system |
| FR2792847B1 (fr) * | 1999-04-27 | 2001-06-15 | Antoine Costa | Dispositif de securisation, de suivi de la maintenance et de gestion du domaine skiable des stations de sports d'hiver |
| US6191732B1 (en) | 1999-05-25 | 2001-02-20 | Carlson Software | Real-time surveying/earth moving system |
| US6619406B1 (en) * | 1999-07-14 | 2003-09-16 | Cyra Technologies, Inc. | Advanced applications for 3-D autoscanning LIDAR system |
| FR2800232B1 (fr) * | 1999-10-27 | 2002-06-07 | Renault Agriculture | Procede pour le guidage automatique d'un engin et dispositif correspondant |
| AU1847201A (en) * | 1999-11-30 | 2001-03-26 | Bombardier Inc. | Method and apparatus for snow depth mapping |
| US6282477B1 (en) * | 2000-03-09 | 2001-08-28 | Caterpillar Inc. | Method and apparatus for displaying an object at an earthworking site |
| JP2001303620A (ja) * | 2000-04-19 | 2001-10-31 | Ohbayashi Corp | 造成管理システム |
| EP1309878A4 (en) * | 2000-06-23 | 2005-01-05 | Sportvision Inc | MODEL OF CONTINUATION FOR DELIMITERING A GPS POSITION |
| JP3407883B2 (ja) * | 2000-09-11 | 2003-05-19 | 国際航業株式会社 | デジタル地図データを用いた土工設計支援システム |
| JP2002188183A (ja) * | 2000-10-12 | 2002-07-05 | Komatsu Ltd | 作機機械の管理装置 |
| US6453227B1 (en) | 2000-12-16 | 2002-09-17 | Caterpillar Inc. | Method and apparatus for providing a display of a work machine at a work site |
| DE10121955A1 (de) * | 2001-01-23 | 2002-07-25 | Ruhrgas Ag | System zum Bestimmen der Position von Baufahrzeugen oder Geräten mit einem Werkzeug zur Bodenbewegung |
| EP1229345A3 (de) * | 2001-01-23 | 2003-12-03 | Ruhrgas Aktiengesellschaft | System zur Bestimmung der Position von Baufahrzeugen oder Geräten mit einem Werkzeug zur Bodenbewegung |
| FI20010673A7 (fi) * | 2001-03-30 | 2002-10-01 | Metso Minerals Tampere Oy | Järjestelmä tiedon keräämiseksi |
| JP4430270B2 (ja) * | 2001-08-06 | 2010-03-10 | 本田技研工業株式会社 | プラントの制御装置及び内燃機関の空燃比制御装置 |
| US6751540B2 (en) * | 2001-10-10 | 2004-06-15 | Caterpillar Inc | Method and apparatus for design placement for earthmoving applications |
| EP1438697A2 (de) * | 2001-10-22 | 2004-07-21 | Leica Microsystems Wetzlar GmbH | Verfahren und vorrichtung zur erzeugung lichtmikroskopischer, dreidimensionaler bilder |
| US6597992B2 (en) * | 2001-11-01 | 2003-07-22 | Soil And Topography Information, Llc | Soil and topography surveying |
| US6880643B1 (en) | 2002-02-07 | 2005-04-19 | Novariant, Inc. | System and method for land-leveling |
| US6701239B2 (en) | 2002-04-10 | 2004-03-02 | Caterpillar Inc | Method and apparatus for controlling the updating of a machine database |
| US7532967B2 (en) * | 2002-09-17 | 2009-05-12 | Hitachi Construction Machinery Co., Ltd. | Excavation teaching apparatus for construction machine |
| DE10260855A1 (de) * | 2002-12-23 | 2004-07-08 | Robert Bosch Gmbh | Verfahren zur Erkennung von Objektkonstellationen anhand von Abstandssignalen |
| US8032659B2 (en) * | 2003-01-21 | 2011-10-04 | Nextio Inc. | Method and apparatus for a shared I/O network interface controller |
| US9002565B2 (en) | 2003-03-20 | 2015-04-07 | Agjunction Llc | GNSS and optical guidance and machine control |
| JP4233932B2 (ja) | 2003-06-19 | 2009-03-04 | 日立建機株式会社 | 作業機械の作業支援・管理システム |
| US20050043872A1 (en) * | 2003-08-21 | 2005-02-24 | Detlef Heyn | Control system for a functional unit in a motor vehicle |
| US7181370B2 (en) * | 2003-08-26 | 2007-02-20 | Siemens Energy & Automation, Inc. | System and method for remotely obtaining and managing machine data |
| US20050117973A1 (en) * | 2003-09-23 | 2005-06-02 | Nelson Jimmie P. | Method and system for preparing a trench and laying pipe in a trench |
| US6845311B1 (en) | 2003-11-04 | 2005-01-18 | Caterpillar Inc. | Site profile based control system and method for controlling a work implement |
| US7079931B2 (en) * | 2003-12-10 | 2006-07-18 | Caterpillar Inc. | Positioning system for an excavating work machine |
| EP1571515A1 (en) * | 2004-03-04 | 2005-09-07 | Leica Geosystems AG | Method and apparatus for managing data relative to a worksite area |
| US7266451B2 (en) * | 2004-03-11 | 2007-09-04 | Trimble Navigation Limited | Shock resistant device |
| JP4102324B2 (ja) * | 2004-03-29 | 2008-06-18 | 株式会社トプコン | 測量データ処理システム、測量データ処理プログラム及び電子地図表示装置 |
| EP1600564A1 (de) * | 2004-05-24 | 2005-11-30 | Leica Geosystems AG | Verfahren zur Steuerung einer oberflächenverändernden Maschine |
| US20050283294A1 (en) * | 2004-06-16 | 2005-12-22 | Lehman Allen A Jr | Method and apparatus for machine guidance at a work site |
| US7317977B2 (en) * | 2004-08-23 | 2008-01-08 | Topcon Positioning Systems, Inc. | Dynamic stabilization and control of an earthmoving machine |
| US20060042804A1 (en) * | 2004-08-27 | 2006-03-02 | Caterpillar Inc. | Work implement rotation control system and method |
| US7178606B2 (en) | 2004-08-27 | 2007-02-20 | Caterpillar Inc | Work implement side shift control and method |
| JP4057571B2 (ja) * | 2004-09-14 | 2008-03-05 | 株式会社日立情報システムズ | 画像分析システム及び画像分析方法 |
| US7121355B2 (en) * | 2004-09-21 | 2006-10-17 | Cnh America Llc | Bulldozer autograding system |
| JP2006132132A (ja) * | 2004-11-04 | 2006-05-25 | Hitachi Constr Mach Co Ltd | 作業管理装置及びこれを備えた作業機械 |
| US6954999B1 (en) * | 2004-12-13 | 2005-10-18 | Trimble Navigation Limited | Trencher guidance via GPS |
| US7765038B2 (en) * | 2005-02-16 | 2010-07-27 | Lockheed Martin Corporation | Mission planning system for vehicles with varying levels of autonomy |
| US7583178B2 (en) * | 2005-03-16 | 2009-09-01 | Datalogic Mobile, Inc. | System and method for RFID reader operation |
| US7857071B1 (en) | 2005-08-05 | 2010-12-28 | Topcon Positioning Systems, Inc. | Grade indicator for excavation operations |
| US20070044980A1 (en) * | 2005-08-31 | 2007-03-01 | Caterpillar Inc. | System for controlling an earthworking implement |
| US20070129869A1 (en) * | 2005-12-06 | 2007-06-07 | Caterpillar Inc. | System for autonomous cooperative control of multiple machines |
| US7607863B2 (en) * | 2006-02-02 | 2009-10-27 | Philip Paull | Automated pipe-laying method and apparatus |
| US7664530B2 (en) * | 2006-06-09 | 2010-02-16 | AT&I Intellectual Property I, L.P | Method and system for automated planning using geographical data |
| US7509198B2 (en) * | 2006-06-23 | 2009-03-24 | Caterpillar Inc. | System for automated excavation entry point selection |
| US7725234B2 (en) * | 2006-07-31 | 2010-05-25 | Caterpillar Inc. | System for controlling implement position |
| US9746329B2 (en) * | 2006-11-08 | 2017-08-29 | Caterpillar Trimble Control Technologies Llc | Systems and methods for augmenting an inertial navigation system |
| US7516563B2 (en) * | 2006-11-30 | 2009-04-14 | Caterpillar Inc. | Excavation control system providing machine placement recommendation |
| US7865285B2 (en) | 2006-12-27 | 2011-01-04 | Caterpillar Inc | Machine control system and method |
| US9615501B2 (en) | 2007-01-18 | 2017-04-11 | Deere & Company | Controlling the position of an agricultural implement coupled to an agricultural vehicle based upon three-dimensional topography data |
| US7908062B2 (en) * | 2007-02-28 | 2011-03-15 | Caterpillar Inc. | System and method for preparing a worksite based on soil moisture map data |
| US8083004B2 (en) | 2007-03-29 | 2011-12-27 | Caterpillar Inc. | Ripper autodig system implementing machine acceleration control |
| WO2008130610A1 (en) | 2007-04-20 | 2008-10-30 | Mark Williams | Vertical curve system for surface grading |
| US20100023228A1 (en) * | 2007-07-13 | 2010-01-28 | Montgomery James L | Apparatus and method for the positioning of a tool of a ground engaging vehicle |
| US7870684B2 (en) * | 2007-08-20 | 2011-01-18 | Davco Farming | Method and system for optimising land levelling designs |
| US7594441B2 (en) * | 2007-09-27 | 2009-09-29 | Caterpillar Inc. | Automated lost load response system |
| US8351684B2 (en) * | 2008-02-13 | 2013-01-08 | Caterpillar Inc. | Terrain map updating system |
| US20090219199A1 (en) * | 2008-02-29 | 2009-09-03 | Caterpillar Inc. | Positioning system for projecting a site model |
| US9176235B2 (en) * | 2008-04-11 | 2015-11-03 | Caterpillar Trimble Control Technologies Llc | System and method for presenting topographical data for an earthmoving operation |
| US8884876B2 (en) * | 2008-10-27 | 2014-11-11 | Autodesk, Inc. | Spatially-aware projection pen interface |
| US8090508B2 (en) * | 2008-12-22 | 2012-01-03 | Deere & Company | Method and system for determining a planned path for a machine |
| US8282312B2 (en) * | 2009-01-09 | 2012-10-09 | Caterpillar Inc. | Machine system operation and control strategy for material supply and placement |
| BE1018564A4 (nl) * | 2009-01-12 | 2011-03-01 | Dredging Int | Werkwijze en inrichting voor het aansturen van een mobiele grondbehandelinrichting. |
| US8386129B2 (en) | 2009-01-17 | 2013-02-26 | Hemipshere GPS, LLC | Raster-based contour swathing for guidance and variable-rate chemical application |
| US20100217640A1 (en) * | 2009-02-20 | 2010-08-26 | Mark Nichols | Method and system for adaptive construction sequencing |
| US20110148856A1 (en) * | 2009-12-18 | 2011-06-23 | Caterpillar Inc. | Parameter Visualization System |
| DE102009059106A1 (de) * | 2009-12-18 | 2011-06-22 | Wirtgen GmbH, 53578 | Selbstfahrende Baumaschine und Verfahren zur Steuerung einer selbstfahrenden Baumaschine |
| US20110153170A1 (en) * | 2009-12-23 | 2011-06-23 | Caterpillar Inc. | System And Method For Controlling An Implement To Maximize Machine Productivity And Protect a Final Grade |
| EP2353353A1 (en) * | 2010-02-05 | 2011-08-10 | Flander's Mechatronics Technology Centre v.z.w. | In use adaptation of schedule for multi-vehicle ground processing operations |
| US20110213529A1 (en) * | 2010-02-26 | 2011-09-01 | Caterpillar Inc. | System and method for determing a position on an implement relative to a reference position on a machine |
| US8676620B2 (en) * | 2010-05-28 | 2014-03-18 | Agjunction Llc | System and method for workorder management |
| JP5303798B2 (ja) * | 2010-07-16 | 2013-10-02 | 株式会社小松製作所 | 無人車両の走行システムおよびその走行制御方法 |
| CA2816096A1 (en) * | 2010-11-10 | 2012-05-18 | Interactive Machine Systems Pty Limited | Assistance system for steering a machine tool |
| US8626404B2 (en) | 2010-11-19 | 2014-01-07 | Caterpillar Inc. | Motor grader wheel slip control for cut to grade |
| JP5059954B2 (ja) | 2011-02-22 | 2012-10-31 | 株式会社小松製作所 | 掘削機械の表示システム及びその制御方法。 |
| AU2012202213B2 (en) * | 2011-04-14 | 2014-11-27 | Joy Global Surface Mining Inc | Swing automation for rope shovel |
| AU2012289920B2 (en) | 2011-08-03 | 2017-02-09 | Joy Global Underground Mining Llc | Stabilization system for a mining machine |
| US8548690B2 (en) * | 2011-09-30 | 2013-10-01 | Komatsu Ltd. | Blade control system and construction machine |
| US8649944B2 (en) * | 2011-10-06 | 2014-02-11 | Komatsu Ltd. | Blade control system, construction machine and blade control method |
| DE102012001289A1 (de) | 2012-01-25 | 2013-07-25 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| US9336627B2 (en) * | 2012-03-12 | 2016-05-10 | Hntb Holdings Ltd. | Creating a model of a scanned surface for comparison to a reference-surface model |
| US9552445B2 (en) | 2012-03-28 | 2017-01-24 | Trimble Inc. | Automatic change propagation in an area-based open pit mine designer |
| US20130262045A1 (en) * | 2012-03-28 | 2013-10-03 | Trimble Navigation Limited | Open pit mine designer |
| US9574326B2 (en) | 2012-08-02 | 2017-02-21 | Harnischfeger Technologies, Inc. | Depth-related help functions for a shovel training simulator |
| AU2014202349A1 (en) | 2012-08-02 | 2014-05-22 | Harnischfeger Technologies, Inc. | Depth-related help functions for a wheel loader training simulator |
| US8989968B2 (en) | 2012-10-12 | 2015-03-24 | Wirtgen Gmbh | Self-propelled civil engineering machine system with field rover |
| CA2834643C (en) * | 2012-11-27 | 2022-01-04 | Technological Resources Pty Ltd | A method of surveying and a surveying system |
| US9228315B2 (en) * | 2012-12-20 | 2016-01-05 | Caterpillar Inc. | System and method for modifying a path for a machine |
| US9045871B2 (en) | 2012-12-27 | 2015-06-02 | Caterpillar Paving Products Inc. | Paving machine with operator directed saving and recall of machine operating parameters |
| US20140214187A1 (en) * | 2013-01-31 | 2014-07-31 | Caterpillar Inc. | RC/Autonomous Machine Mode Indication |
| JP5789279B2 (ja) * | 2013-04-10 | 2015-10-07 | 株式会社小松製作所 | 掘削機械の施工管理装置、油圧ショベルの施工管理装置、掘削機械及び施工管理システム |
| US10204388B2 (en) * | 2013-04-19 | 2019-02-12 | Trimble Inc. | Method, system, and medium of construction project management |
| USD742891S1 (en) * | 2013-04-23 | 2015-11-10 | Eidetics Corporation | Display screen or portion thereof with a graphical user interface |
| US9096977B2 (en) | 2013-05-23 | 2015-08-04 | Wirtgen Gmbh | Milling machine with location indicator system |
| CN103392533B (zh) * | 2013-07-04 | 2015-10-28 | 北京农业智能装备技术研究中心 | 置床机及其控制方法 |
| CA2922812C (en) | 2013-08-29 | 2021-11-16 | Joy Mm Delaware, Inc. | Detecting sump depth of a miner |
| DE102013221301A1 (de) * | 2013-10-21 | 2015-04-23 | Mts Maschinentechnik Schrode Ag | Verfahren zum Kalibrieren der Position einer Baumaschine in einem Baustellenplan |
| US20150153456A1 (en) * | 2013-12-02 | 2015-06-04 | Hemisphere Gnss Inc. | Integrated machine guidance system |
| US20150154247A1 (en) * | 2013-12-03 | 2015-06-04 | Caterpillar Inc. | System and method for surface data management at worksite |
| US9733643B2 (en) | 2013-12-20 | 2017-08-15 | Agjunction Llc | Hydraulic interrupter safety system and method |
| US9651381B2 (en) | 2014-01-10 | 2017-05-16 | Caterpillar Inc. | Terrain mapping system using virtual tracking features |
| US9234329B2 (en) * | 2014-02-21 | 2016-01-12 | Caterpillar Inc. | Adaptive control system and method for machine implements |
| US10503249B2 (en) | 2014-07-03 | 2019-12-10 | Topcon Positioning Systems, Inc. | Method and apparatus for construction machine visualization |
| DE102014012836B4 (de) | 2014-08-28 | 2018-09-13 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zur Visualisierung des Bearbeitungsumfeldes einer sich im Gelände bewegenden Baumaschine |
| DE102014012825A1 (de) | 2014-08-28 | 2016-03-03 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zur Steuerung einer selbstfahrenden Baumaschine |
| DE102014012831B4 (de) | 2014-08-28 | 2018-10-04 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| US10162350B2 (en) * | 2014-09-10 | 2018-12-25 | Universal City Studios Llc | Systems and methods for controlling the transportation of vehicles |
| US9388550B2 (en) * | 2014-09-12 | 2016-07-12 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| JP6382688B2 (ja) * | 2014-11-06 | 2018-08-29 | 日立建機株式会社 | 地図生成装置 |
| US9328479B1 (en) * | 2015-02-05 | 2016-05-03 | Deere & Company | Grade control system and method for a work vehicle |
| US10186004B2 (en) | 2015-05-20 | 2019-01-22 | Caterpillar Inc. | System and method for evaluating a material movement plan |
| WO2016208276A1 (ja) * | 2015-06-23 | 2016-12-29 | 株式会社小松製作所 | 施工管理システム及び施工管理方法 |
| EP3351692B1 (en) * | 2015-09-15 | 2025-01-22 | Sumitomo (S.H.I.) Construction Machinery Co., Ltd. | Shovel |
| JP6616149B2 (ja) * | 2015-10-05 | 2019-12-04 | 株式会社小松製作所 | 施工方法、作業機械の制御システム及び作業機械 |
| DE102015221356B4 (de) | 2015-10-30 | 2020-12-24 | Conti Temic Microelectronic Gmbh | Vorrichtung und Verfahren zur Bereitstellung einer Fahrzeugrundumansicht |
| CN108431336B (zh) * | 2015-12-18 | 2022-02-01 | 沃尔沃建筑设备公司 | 用于确定待从料堆移除的材料实体的系统和方法 |
| US10924881B2 (en) * | 2016-03-03 | 2021-02-16 | Husqvarna Ab | Device for determining construction device and worker position |
| JP6862421B2 (ja) * | 2016-03-30 | 2021-04-21 | 住友建機株式会社 | ショベル及びショベルの表示装置 |
| CN108475399B (zh) * | 2016-03-30 | 2023-10-31 | 株式会社小松制作所 | 模拟系统及模拟方法 |
| KR102333458B1 (ko) | 2016-03-31 | 2021-11-30 | 스미토모 겐키 가부시키가이샤 | 쇼벨 및 쇼벨의 표시장치 |
| JP7122800B2 (ja) * | 2016-08-05 | 2022-08-22 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP6871695B2 (ja) | 2016-08-05 | 2021-05-12 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP7122802B2 (ja) * | 2016-08-05 | 2022-08-22 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| US10316491B2 (en) * | 2016-08-08 | 2019-06-11 | Caterpillar Inc. | Machine control system having multi-blade position coordination |
| US10552775B2 (en) | 2016-11-29 | 2020-02-04 | Caterpillar Inc. | System and method for optimizing a material moving operation |
| WO2018142453A1 (ja) * | 2017-01-31 | 2018-08-09 | 株式会社小松製作所 | 作業車両の制御システム、及び作業機の軌跡設定方法 |
| AU2018245330B2 (en) * | 2017-03-30 | 2020-04-02 | Komatsu Ltd. | Control system for work vehicle, method for setting trajectory of work implement, and work vehicle |
| JP6934427B2 (ja) * | 2017-03-31 | 2021-09-15 | 株式会社小松製作所 | 作業車両の制御システム、及び作業機の軌跡設定方法 |
| CN110574078B (zh) * | 2017-07-14 | 2023-03-28 | 株式会社小松制作所 | 显示控制装置、显示控制方法、记录介质以及显示系统 |
| JP6910245B2 (ja) | 2017-08-29 | 2021-07-28 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| JP6861598B2 (ja) * | 2017-08-29 | 2021-04-21 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| AU2017429426B2 (en) * | 2017-08-29 | 2021-04-29 | Komatsu Ltd. | Control System for Work Vehicle, Method, and Work Vehicle |
| US20190093319A1 (en) * | 2017-09-22 | 2019-03-28 | CNH Industrial America, LLC | Automatic grading systems and related methods for performing grading operations |
| US10543782B2 (en) * | 2017-12-19 | 2020-01-28 | Caterpillar Paving Products Inc. | Cutting tool visual trajectory representation system and method |
| JP7152170B2 (ja) * | 2018-03-28 | 2022-10-12 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| JP7169760B2 (ja) * | 2018-03-29 | 2022-11-11 | 株式会社小松製作所 | 作業車両の制御システム、方法、及び作業車両 |
| US11761173B2 (en) | 2018-06-26 | 2023-09-19 | Caterpillar Inc. | Systems and methods for building a pad |
| DE102018119962A1 (de) | 2018-08-16 | 2020-02-20 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| US10570588B1 (en) * | 2018-12-21 | 2020-02-25 | Cnh Industrial America Llc | Systems and methods for performing grading operations based on data captured from site markers distributed across a worksite |
| CN111637897B (zh) * | 2019-03-01 | 2022-04-19 | 纳恩博(常州)科技有限公司 | 地图的更新方法、更新装置、存储介质以及处理器 |
| US11126188B2 (en) * | 2019-04-15 | 2021-09-21 | Caterpillar Inc. | System and method for maintaining a work surface at a worksite |
| CN110172894A (zh) * | 2019-06-05 | 2019-08-27 | 郑州路桥建设投资集团有限公司 | 基于gps技术的摊铺机摊铺轨迹跟踪方法 |
| DE102019118059A1 (de) | 2019-07-04 | 2021-01-07 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zum Steuern einer selbstfahrenden Baumaschine |
| DE102019135225B4 (de) | 2019-12-19 | 2023-07-20 | Wirtgen Gmbh | Verfahren zum Abfräsen von Verkehrsflächen mit einer Fräswalze, sowie Fräsmaschine zur Durchführung des Verfahrens zum Abfräsen von Verkehrsflächen |
| JP2021143498A (ja) * | 2020-03-11 | 2021-09-24 | 株式会社小松製作所 | 操作システム |
| US11236492B1 (en) * | 2020-08-25 | 2022-02-01 | Built Robotics Inc. | Graphical user interface for real-time management of an earth shaping vehicle |
| JP7533081B2 (ja) * | 2020-09-29 | 2024-08-14 | コベルコ建機株式会社 | 自動均しシステム |
| JP2022067404A (ja) * | 2020-10-20 | 2022-05-06 | 株式会社シーティーエス | 敷均し転圧管理システム |
| CN112650221B (zh) * | 2020-12-03 | 2021-12-03 | 广州极飞科技股份有限公司 | 平地路径生成方法、装置、处理设备及存储介质 |
| US11873617B2 (en) | 2021-02-02 | 2024-01-16 | Deere & Company | Mobile grading machine with improved grading control system |
| JP7646437B2 (ja) * | 2021-04-28 | 2025-03-17 | ヤンマーホールディングス株式会社 | 作業機械管理方法、作業機械管理システムおよび作業機械管理プログラム |
| WO2023084794A1 (ja) * | 2021-11-15 | 2023-05-19 | 日本電信電話株式会社 | 管路位置取得装置、管路位置取得方法及びプログラム |
| EP4605605A1 (en) * | 2022-10-19 | 2025-08-27 | Kinematic ApS | Terrain modification tracking |
| US12291840B2 (en) * | 2023-01-25 | 2025-05-06 | Deere &Company | System and method of automated setting of elevation reference for continuous grade control |
| US12601121B2 (en) | 2023-08-01 | 2026-04-14 | Caterpillar Paving Products Inc. | Control of a work machine using ground surface work records |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5921835A (ja) * | 1982-07-29 | 1984-02-03 | Komatsu Zoki Kk | 地面を所定の形状に仕上げる施工方法 |
| JPS6084610A (ja) * | 1983-10-17 | 1985-05-14 | Hitachi Ltd | 誘導装置 |
| US4965586A (en) * | 1984-08-16 | 1990-10-23 | Geostar Corporation | Position determination and message transfer system employing satellites and stored terrain map |
| JPS63135815A (ja) * | 1986-11-28 | 1988-06-08 | Komatsu Ltd | 車載表示装置 |
| US4807131A (en) * | 1987-04-28 | 1989-02-21 | Clegg Engineering, Inc. | Grading system |
| JP2564832B2 (ja) * | 1987-06-27 | 1996-12-18 | 神鋼電機株式会社 | 自立型無人車 |
| JPS6478305A (en) * | 1987-09-21 | 1989-03-23 | Shinko Electric Co Ltd | Input method for outside information on unmanned vehicle |
| US4982329A (en) * | 1987-06-27 | 1991-01-01 | Shinko Electric Co., Ltd. | Self-contained unmanned vehicle |
| US5287280A (en) * | 1987-09-14 | 1994-02-15 | Kabushiki Kaisha Komatsu Seisakusho | Method and apparatus for controlling shoe slip of crawler vehicle |
| JPH01174247A (ja) * | 1987-12-28 | 1989-07-10 | Mitsuba Electric Mfg Co Ltd | 回転電機における永久磁石の酸化保護構造 |
| US4915757A (en) * | 1988-05-05 | 1990-04-10 | Spectra-Physics, Inc. | Creation of three dimensional objects |
| JP2568109B2 (ja) * | 1988-06-13 | 1996-12-25 | 株式会社小松製作所 | 地形情報表示装置 |
| JP2523005B2 (ja) * | 1988-11-29 | 1996-08-07 | 株式会社小松製作所 | 建設作業の管制システム |
| JP2772551B2 (ja) * | 1989-07-31 | 1998-07-02 | 大成建設株式会社 | 総合工事管理方法 |
| WO1991009375A1 (en) * | 1989-12-11 | 1991-06-27 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| US5148110A (en) * | 1990-03-02 | 1992-09-15 | Helms Ronald L | Method and apparatus for passively detecting the depth and location of a spatial or temporal anomaly by monitoring a time varying signal emanating from the earths surface |
| JPH0470584A (ja) * | 1990-07-11 | 1992-03-05 | Mitsubishi Electric Corp | 衛星航法装置 |
| JPH04174388A (ja) * | 1990-11-06 | 1992-06-22 | Komatsu Ltd | 建設機械の監視装置 |
| DE4133392C1 (en) * | 1991-10-09 | 1992-12-24 | Rheinbraun Ag, 5000 Koeln, De | Determining progress of mining material spreader - receiving signals from at least four satellites at end of tipping arm and at vehicle base and calculating actual geodetic positions and height of material tip |
| US5359521A (en) * | 1992-12-01 | 1994-10-25 | Caterpillar Inc. | Method and apparatus for determining vehicle position using a satellite based navigation system |
| US5375663A (en) * | 1993-04-01 | 1994-12-27 | Spectra-Physics Laserplane, Inc. | Earthmoving apparatus and method for grading land providing continuous resurveying |
| US5471391A (en) * | 1993-12-08 | 1995-11-28 | Caterpillar Inc. | Method and apparatus for operating compacting machinery relative to a work site |
-
1994
- 1994-11-08 ZA ZA948824A patent/ZA948824B/xx unknown
- 1994-11-18 EP EP95901247A patent/EP0682786B1/en not_active Expired - Lifetime
- 1994-11-18 WO PCT/US1994/013143 patent/WO1995016228A1/en not_active Ceased
- 1994-11-18 AU AU10563/95A patent/AU682422B2/en not_active Ceased
- 1994-11-18 DE DE69430663T patent/DE69430663T2/de not_active Expired - Lifetime
- 1994-11-18 CA CA002152960A patent/CA2152960A1/en not_active Abandoned
- 1994-11-18 CN CN94191115A patent/CN1117317A/zh active Pending
- 1994-11-18 JP JP51619595A patent/JP3645568B2/ja not_active Expired - Fee Related
-
1996
- 1996-02-27 US US08/607,542 patent/US5631658A/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023102447A (ja) * | 2022-01-12 | 2023-07-25 | 株式会社大林組 | 作業支援システム、作業支援方法及び作業支援プログラム |
| JP7750106B2 (ja) | 2022-01-12 | 2025-10-07 | 株式会社大林組 | 作業支援システム、作業支援方法及び作業支援プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US5631658A (en) | 1997-05-20 |
| CA2152960A1 (en) | 1995-06-15 |
| CN1117317A (zh) | 1996-02-21 |
| EP0682786A1 (en) | 1995-11-22 |
| ZA948824B (en) | 1995-07-11 |
| WO1995016228A1 (en) | 1995-06-15 |
| DE69430663D1 (de) | 2002-06-27 |
| DE69430663T2 (de) | 2003-02-06 |
| JPH08506870A (ja) | 1996-07-23 |
| AU1056395A (en) | 1995-06-27 |
| AU682422B2 (en) | 1997-10-02 |
| EP0682786B1 (en) | 2002-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3645568B2 (ja) | 作業場所に対して地形変更マシンを操作する方法と装置 | |
| JP4121595B2 (ja) | 作業現場に対し地形変更機械を操作するための方法と装置 | |
| CA2371756C (en) | Real-time surveying/earth moving system | |
| US5996702A (en) | System for monitoring movement of a vehicle tool | |
| US5404661A (en) | Method and apparatus for determining the location of a work implement | |
| JP3585237B2 (ja) | ワークサイトで使用される圧縮成形用機械の操作のための方法と装置 | |
| US5964298A (en) | Integrated civil engineering and earthmoving system | |
| JP3662587B2 (ja) | 作業機械の位置と方向を決定する方法と装置 | |
| US5659985A (en) | Excavator data acquisition and control system and process | |
| US20210025143A1 (en) | Excavation by way of an unmanned vehicle | |
| AU702626B2 (en) | Method and apparatus for operating geography-altering machinery relative to work site | |
| US20250314047A1 (en) | Work machine implement control for autonomous subterranean surveying and marking applications | |
| US20250370472A1 (en) | Perception-Based Navigation for Mobile Machines | |
| AU698674B2 (en) | A system for monitoring movement of a vehicle tool | |
| Carter | Mining with precision |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050111 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050204 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080210 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090210 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090210 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100210 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110210 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110210 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120210 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120210 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130210 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130210 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |