JP3660102B2 - 長物農産物の選別装置 - Google Patents
長物農産物の選別装置 Download PDFInfo
- Publication number
- JP3660102B2 JP3660102B2 JP15784697A JP15784697A JP3660102B2 JP 3660102 B2 JP3660102 B2 JP 3660102B2 JP 15784697 A JP15784697 A JP 15784697A JP 15784697 A JP15784697 A JP 15784697A JP 3660102 B2 JP3660102 B2 JP 3660102B2
- Authority
- JP
- Japan
- Prior art keywords
- sorting
- pallet
- long
- conveyor
- produce
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000032258 transport Effects 0.000 claims description 42
- 238000001514 detection method Methods 0.000 claims description 26
- 238000000034 method Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 238000012546 transfer Methods 0.000 description 8
- 238000011144 upstream manufacturing Methods 0.000 description 8
- 238000007599 discharging Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 4
- 238000012856 packing Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000000696 magnetic material Substances 0.000 description 3
- 230000005415 magnetization Effects 0.000 description 3
- 244000003416 Asparagus officinalis Species 0.000 description 2
- 235000005340 Asparagus officinalis Nutrition 0.000 description 2
- 235000002566 Capsicum Nutrition 0.000 description 2
- 239000006002 Pepper Substances 0.000 description 2
- 235000016761 Piper aduncum Nutrition 0.000 description 2
- 235000017804 Piper guineense Nutrition 0.000 description 2
- 244000203593 Piper nigrum Species 0.000 description 2
- 235000008184 Piper nigrum Nutrition 0.000 description 2
- 244000061458 Solanum melongena Species 0.000 description 2
- 235000002597 Solanum melongena Nutrition 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 235000013162 Cocos nucifera Nutrition 0.000 description 1
- 244000060011 Cocos nucifera Species 0.000 description 1
- 244000000626 Daucus carota Species 0.000 description 1
- 235000002767 Daucus carota Nutrition 0.000 description 1
- 108010076504 Protein Sorting Signals Proteins 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- ZDXLFJGIPWQALB-UHFFFAOYSA-M disodium;oxido(oxo)borane;chlorate Chemical compound [Na+].[Na+].[O-]B=O.[O-]Cl(=O)=O ZDXLFJGIPWQALB-UHFFFAOYSA-M 0.000 description 1
- 235000013399 edible fruits Nutrition 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 239000010902 straw Substances 0.000 description 1
Images









Landscapes
- Discharge Of Articles From Conveyors (AREA)
- Control Of Conveyors (AREA)
- Sorting Of Articles (AREA)
- Attitude Control For Articles On Conveyors (AREA)
Description
【発明の属する技術分野】
本発明は、例えば茄子、人参、胡瓜、アスパラガス、花き等の長物農産物を所定の等級別・階級別等の仕分区分で選別する長物農産物の選別装置に関する。
【0002】
【従来の技術】
一般的に、上記のような長物農産物の選別は、仕分区分に対応した引出コンベア上に、長物農産物の向き(例えば茄子の蔕側)を揃えて仕分け排出し、そのまま箱詰部まで搬送し、自動箱詰めあるいは手詰めによる箱詰め作業を容易にしている。そして従来、この長物農産物を揃えて仕分け排出し得る選別装置としては、例えば特開昭60−166073号公報、特開平8−58727号公報及び特公平5−68320号公報に開示されている。
【0003】
この特開昭60−166073号公報に開示の選別装置は、長物農産物の外観品位による等級毎にそれぞれ指定区域にかかるように載せて移送する手段と、撮影装置と演算処理装置とを用いて長物農産物の外観の等級を読み取る読み取り手段と、等級を判定する判定手段及び総合判定等級を格付けする手段と、仕分信号を出力する手段等を具備してなるものである。
【0004】
また、特開平8−58272号公報に開示の選別装置は、容器内に収容された長物農産物を搬送途中に設けた端部揃え装置により、容器を傾動させて前端部または後端部方向に移動させて揃えるようにしたものであり、また、特公平5−68320号公報に開示の選別装置は、長物農産物を選別コンベアに載せて搬送する途中でカメラにより撮影し、その画像を解析処理することにより、長物農産物の茎の面積を計測して、階級別に仕分け排出するようにしたものである。
【0005】
そして、これらの選別装置は、何れも人手によって長物農産物の向き、すなわちアスパラガスの場合は穂先側を、茄子の場合は蔕側を、胡瓜の場合は葉落ち側を揃えて選別装置の選別コンベアに供給して選別するものである。このようにして、向きが一定の方向に揃えられて選別コンベア(仕分コンベア、搬送コンベアともいう)の受皿上に供給された長物農産物は、カメラ等の計測装置によって仕分区分(等級・階級等)の判定のための要素(大きさ、形、色、傷等)が計測される。
【0006】
その後、この計測装置から計測信号が演算制御装置に入力され、演算制御装置はこの計測信号に基づいて長物農産物の仕分区分を判定し、仕分排出信号を選別コンベアの該当する排出装置に受皿の搬送移動と同期して出力する。選別コンベアで搬送される受皿上の長物農産物が所定の位置に到達すると、上記仕分排出信号により当該排出位置が作動して、受皿上の長物農産物を引き出しコンベア上に仕分け排出する。これにより、引き出しコンベア上で搬送される長物農産物がそれぞれ一定の向きに揃えられて箱詰めされるようになっている。
【0007】
【発明が解決しようとする課題】
しかしながら、上記の選別装置にあっては、長物農産物の選別コンベアへの供給作業の作業効率が劣り、選別装置を含めた選別ラインの自動化及び高速化が困難であるという問題点があった。
【0008】
すなわち、選別装置の選別コンベアへの長物農産物の供給は、選別コンベアの受皿上に長物農産物を単に供給するだけでなく、その向きを揃えて供給する必要があるため、人手による揃え作業が必要となって供給作業に手間がかかる。また、持ち込まれたコンテナ内の長物農産物の状態、すなわちコンテナ内に長物農産物が整然と並べられている場合と、長物農産物が荷崩れをおこしている場合とではコンテナ内の量に差が生じるため、選別コンベアの受皿上に長物農産物を所定量安定して供給することも困難になる。
【0009】
さらに、供給作業が人手による作業であるため、その能力に自ずと限度があると共に、作業者により供給量にバラツキが発生したり、作業時間の経過と共に作業者の疲労により作業能力も低下し易いこと等から、向き揃え作業のスピードが一定化し難い。これらのことから、選別コンベアへの長物農産物の供給作業の作業効率が劣ることになる。
【0010】
また、近年における計測処理技術の向上、自動供給装置(長物農産物の供給を自動的に行う装置)の改良、仕分排出装置(選別コンベアから長物農産物を仕分ける装置)の高速対応化等に伴い、選別ラインの高速化が要望されている。しかし、上記のような長物農産物の選別装置においては、長物農産物を選別コンベアに自動的で供給できても、長物農産物の向きを揃えることは人手に頼らなければならないのが現状であり、選別ラインの実施的な省力化には至っていない。
【0011】
そこで、選別ラインの高速処理化を進めるために、人手を増やしてそれに対応する方法も考えられるが、選別コンベアの搬送速度が作業者の能力以上に速いと作業者がそれに対応することができない。その結果、選別コンベアの搬送速度を、人手による作業速度以上の速度に設定することが困難で、人手を増やしても高速処理化に対応できないことになる。また、選果場は、長物農産物の収穫時期である一定期間のみの稼動となり易いため、作業者の人手不足も深刻となりつつあり、選別ラインの高速自動化がより一層望まれているのが実状である。
【0012】
本発明はこのように事情に鑑みてなされたもので、その目的は、選別コンベアへの長物農産物の供給作業の作業効率を向上させると共に、長物農産物の向きを自動的に揃えて仕分けることができ、選別ラインの自動化及び高速化に容易に対応し得る長物農産物の選別装置を提供することにある。また、本発明の別の目的は、長物農産物の向きを揃えて仕分けることができると共に、その向きを箱詰め収容形態等に応じて変えることが可能で箱詰め作業の作業効率を向上させ得る長物農産物の選別装置を提供することにある。
【0013】
【課題を解決するための手段】
かかる目的を達成すべく、本発明のうち請求項1記載の発明は、長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って長物農産物の仕分区分にそれぞれ対応して設けられ該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、この一対の排出部にそれぞれ対応して設けられ各排出部から排出された長物農産物をそれぞれ所定方向に搬送する一対の搬出手段と、前記判定手段の判定結果に基づいて前記排出部を作動させる仕分制御手段と、を具備し、前記一対の搬出手段のうちの一方の搬出手段の終端側と他方の搬出手段の始端側とが180度カーブコンベアで接続されていることを特徴とする。
【0014】
このように構成することにより、選別コンベア上を横向きになって搬送される長物農産物は、判定手段で長物農産物の仕分区分及び向きが判定されて、仕分制御手段で仕分区分別の一対の排出部のうちのその向きに応じた一方の排出部から対応する搬出手段上に排出されるが、この一方の排出部から対応する搬出手段上に排出された長物農産物は、180度カーブコンベアで搬送されて他方の搬出手段上の長物農産物と同一の向きに、すなわち全ての長物農産物の向きが同一方向に揃えられる。そして、この向きが揃えられた長物農産物が他方の搬出手段から取り出されて、例えば箱詰めされる。これにより、選別コンベア上への長物農産物の供給は、その向きにこだわる必要がなくなり供給作業が容易になると共に、供給作業及び仕分作業の自動化により選別装置の自動化や高速化に容易に対応し得る。
【0018】
また、請求項2記載の発明は、長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って前記長物農産物の仕分区分にそれぞれ対応して設けられ、該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、前記判定手段の判定結果に基づいて所定の仕分区分別向き別の排出部を作動させる仕分制御手段と、前記一対の排出部にそれぞれ対応して設けられ該排出部の下方に該排出部で排出された長物農産物を載置するためのパレットを供給すると共に、長物農産物が載せられたパレットを所定方向に送り出す一対のパレット搬出装置と、該一対のパレット搬出装置で送り出される長物農産物入りのパレットを合流させて搬送する搬送コンベアと、該搬送コンベアで搬送されるパレット上の長物農産物の向きをパレット個々に識別する向き識別手段と、前記搬送コンベアの所定位置に設けられ搬送されてくるパレットを前記向き識別手段の識別結果に基づいて水平方向に180度回転させる方向転換装置と、を具備し、前記向き識別手段は、パレットに設けられ該パレット上の長物農産物の向きを示す情報が記憶された記憶部と、該記憶部に記憶された情報を検知する検知部とを有することを特徴とする。
【0019】
このように構成することにより、選別コンベア上を横向きで搬送される長物農産物は、判定手段で判定された仕分区分及び向きに応じて、仕分区分別の一対の排出部のうちの一方の排出部からパレット搬出装置上のパレットに排出される。この長物農産物が載置されたパレットは、パレット搬出装置により搬送コンベア上に送り出されて他方の排出部から排出された長物農産物のパレットと合流して搬送される。
【0020】
そして、この搬送コンベア上で搬送されるパレット上の長物農産物の向きが、向き識別手段の検知部がパレットの記憶部に記憶された長物農産物の向きを示す情報を検知することによってパレット個々に識別され、この向き識別手段で識別された向きが必要とする長物農産物の向きと異なる場合には、方向転換装置によりパレットの向きが180度水平回転させられる。これにより、必要とする長物農産物の向きが搬送コンベア上で得られ、これが搬送コンベアの下流側に搬送されて、パレット上の長物農産物が所定の向きで箱詰めされる。
【0022】
また、請求項3記載の発明は、長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って長物農産物の仕分区分にそれぞれ対応して設けられ該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、前記判定手段の判定結果に基づいて所定の仕分区分別向き別の排出部を作動させる仕分制御手段と、前記一対の排出部にそれぞれ対応して設けられ該排出部の下方に該排出部で排出された長物農産物を載置するためのパレットを供給すると共に、長物農産物が載せられたパレットを所定方向に送り出す一対のパレット搬出装置と、該一対のパレット搬出装置で送り出される長物農産物入りのパレットを合流させて搬送する搬送コンベアと、該搬送コンベアで搬送されるパレット上の長物農産物の向きをパレット個々に識別する向き識別手段と、前記搬送コンベアの所定位置に設けられ搬送されてくるパレットを前記向き識別手段の識別結果に基づいて水平方向に180度回転させる方向転換装置と、を具備し、前記向き識別手段は、パレットに設けられたパレット識別標識を検出するパレット識別標識検出手段の検出情報と、当該パレット内の長物農産物の向き情報とに基づいて長物農産物の向きをパレット個々に識別するものであることを特徴とする。
【0023】
このように構成することにより、上記請求項2記載の発明の作用と同様の作用を呈するが、この向き識別手段における識別にあっては、パレットに設けられる固有のバーコードシール、番号、色等のパレット識別標識を、例えばバーコードリーダ、文字読み取り、カラーセンサ等のパレット識別標識検出手段で検出して識別標識検出情報(固有情報)を得、この情報を外部のメモリに記憶する。一方、長物農産物の向き情報は、長物農産物を向き別に排出する排出部より得ることができ、この二つの情報によって、パレット個々の長物農産物の向きが識別される。
【0024】
また、請求項4記載の発明は、搬送コンベアが、その下流側に箱詰めロボットを有し、搬送コンベアで搬送されてくる長物農産物が箱詰めロボットによって箱詰めされることを特徴とする。このように構成することにより、選別コンベア上に向きにこだわるこなく供給された長物農産物が、仕分区分及びその向きに応じて箱詰めロボットによって自動的に箱詰めされ、選別作業の略完全自動化が図れる。
【0025】
【発明の実施の形態】
以下、本発明の実施の形態の一例を図面に基づいて詳細に説明する。
図1〜図9は、本発明に係わる長物農産物の選別装置の一実施例を示し、図1がその概略平面図、図2が一つの仕分区分を示す平面図、図3がその正面図、図4及び図5が搬出コンベア及び搬入コンベアの動作説明図、図6が制御装置の接続状態を示すブロック図、図7がその動作を示すフローチャート、図8が箱詰め状態の他の例を示す説明図、図9がその動作を示すフローチャートである。
【0026】
図1〜図5において、選別装置1は、2条並設され長物農産物Wをそれぞれ搬送する選別コンベア2と、この選別コンベア2の搬送途中に設けられた判定装置3と、選別コンベア2の判定装置3の下流側に仕分区分S1〜Sn(以下、仕分区分S1〜S3とする)毎に配置された一対の排出部4と、この一対の排出部4に接続され選別コンベア2の搬送方向イと直交する方向でパレット7を供給すると共に、長物農産物Wが載せられたパレット7を所定方向に送り出す一対のパレット搬出装置5と、この一対のパレット搬出装置5で送り出されるパレット7を合流させて搬送する搬送コンベアとして貯留装置6と、この貯留装置6の所定位置に設けられパレット7を必要に応じて水平方向に180度回転させ得る方向転換装置8と、前記貯留装置6の下流側に接続されてパレット7上の長物農産物Wを自動的に取り上げて箱詰めする箱詰装置9とを備えている。
【0027】
前記選別コンベア2は、長物農産物Wをその長手方向を横向きにして載せるバケット2aを多数備え、このバケット2aを所定の仕分排出位置で水平保持状態から下方傾動状態に回動させることにより、バケット2a上の長物農産物Wを下方に排出するように構成されている。
【0028】
前記判定装置3は、例えば図示しない照明ランプ及びCCDカメラ等を有し、選別コンベア2上の長物農産物Wに光を照射し、その反射光をCCDカメラで受光することにより画像データを得、この画像データを図示しない処理装置で解析処理して、長物農産物Wの階級・等級等の仕分区分と向き(例えば蔕がどちらにあるか)を判定する。そして、この判定結果に基づき仕分区分別向き別の仕分信号が後述する如く排出部4にそれぞれ出力される。
【0029】
前記一対の排出部4は、選別コンベア2の仕分区分S1〜S3毎に、長物農産物Wの向きに応じて仕分けるようにそれぞれ対をなして設けられている。そして、この一対の排出部4は、パレット7の載せ部7aの数及び位置に対応した、例えば電磁ソレノイドもしくはシリンダ等からなる排出作動装置4aを選別コンベア2の搬送路に沿って所定間隔で備えている。
【0030】
前記パレット搬出装置5は、排出部4の下方に空のパレット7を送り込むと共に、長物農産物Wが載せられたパレット7を選別コンベア2の搬送路側方に搬送し、その後合流のタイミングを図って貯留装置6上に送り出すように構成されている。すなわち、パレット搬出装置5は、選別コンベア2の搬送方向イと直交する方向にそれぞれ移動するコンベアチェーン10と、パレット7の搬出コンベア11及び搬入コンベア12等を有し、コンベアチェーン10は、4個のスプロケット13にそれぞれ巻回され、例えば前記パレット7が載せられる6個のパレット載台14が等間隔で取り付けられている。そして、コンベアチェーン10は、図示しない間歇駆動装置の作動により、図3の矢印ロ方向に間歇的に所定距離移動して停止する。
【0031】
図2に示すように、一対のパレット搬出装置5のうちの選別コンベア2の下流側のパレット搬出装置5の所定のパレット載台14に対応した位置には、貯留装置6に設けられた磁気検出センサ15と共に向き識別手段を構成する着磁器16が設けられている。この着磁器16は、パレット7の一部に設けられている記憶部としての磁性体17(図8参照)を磁化するようになっており、この磁性体17は使用されるパレット7の全てに備えられている。なお、この磁性体17はパレット17の形状や磁気検出センサ15の位置との関係で1箇所または複数箇所に設けても良い。
【0032】
この磁性体17への磁化によって、パレット7上の長物農産物Wの向きが記憶され、後述する如く磁気検出センサ15の検知によって検出することができる。また、貯留装置6の下方に設けられた空パレットリターンコンベア21の途中には、前記パレット7の磁性体17に磁化された磁気を消去するための脱磁器18(図3参照)が設けられている。
【0033】
なお、この実施例においては、一対の排出部4のうち一方の排出部4に対応するパレット7を磁化することにより、磁化しない他方のパレット7と区別(識別)できるように構成したが、異なる例として長物農産物Wの向きに対応して一対の排出部4の一方をN極、他方をS極にそれぞれ磁化することにより両者のパレット7をそれぞれ区別するようにしても良い。
【0034】
前記搬出コンベア11は、コンベアチェーン10の往路側と貯留装置6の搬送コンベア19の搬送面とに亘って設けられ、昇降機20の作動によって昇降するようになっている。この昇降機20の上昇動作によってパレット載台14上の長物農産物Wが収容されたパレット7を、下流側に位置する貯留装置6の前記搬送コンベア19上へ搬出する。また、前記搬入コンベア12は、コンベアチェーン10の復路側と搬送コンベア19の下方の空パレットリターンコンベア21とに亘って設けられ、空パレットリターンコンベア21上の空のパレット7が、パレット搬出装置5のパレット載台14上に搬入されように構成されている。
【0035】
このパレット搬出装置5と選別コンベア2の排出部4との間には、図5に示す案内装置23が設けられている。この案内装置23は、排出部4の下方に、排出作動装置4aの数に対応して設けられた案内板23aを有し、排出作動装置4aの作動によって、選別コンベア2のバケット2a上から下方に排出される長物農産物Wを案内(センタリング)して、パレット7の半円弧状の載せ部7a内に収容させる。
【0036】
前記貯留装置6は、一対のパレット搬出装置5から送り出されるパレット7を合流して搬送するものでアキュームレート可能なローラコンベアやベルトコンベア等の搬送コンベア19で構成されている。この搬送コンベア19の搬送面の所定位置に方向転換装置8と端部揃え装置25とが設けられている。そして、方向転換装置8の上流側に、パレット7の磁性体17の磁化の有無を検知する前記磁気検出センサ15が設けられている。
【0037】
この貯留装置6は、各仕分区分S1〜S3に対応したパレット搬出装置5で搬送されてくるパレット7を、各仕分区分S1〜S3毎に搬送コンベア19の上流側で合流させて搬送すると共に、必要に応じて方向転換装置8でパレット7を180度水平回転させ、また、端部揃え装置25でパレット7内の長物農産物Wの端部を揃えて、下流側の箱詰装置9の位置まで搬送する。
【0038】
前記方向転換装置8は、回転駆動機構26の回転軸の先端にパレット7を載置するためのパレット回転板27が設けられている。回転駆動機構26は、図示しない昇降装置と組み合わせて構成されており、昇降装置の上昇動作でパレット7を搬送コンベア19の搬送面から切り離すようになっている。また、方向転換装置8の直下流側には、搬送コンベア19で搬送されてくるパレット7を停止させるための上下動可能なストッパ28が設けられている。このストッパ28は通常上昇しており、このストッパ28で停止させられたパレット7は、後述する制御装置42から出力される反転指示信号で回転駆動機構26が作動することにより、搬送コンベア19上から若干持ち上げられて180度水平回転させられる。これにより、パレット7上の長物農産物Wが180度方向転換される。
【0039】
この方向転換装置8の上流側に設置された磁気検出センサ15は、方向転換装置8の直前に位置するパレット7上の長物農産物Wの向きを、その磁性体17の磁化状態(磁化されているか否か)によって識別するもので、この実施例では一対の排出部4のうちの下流側の排出部4から排出された長物農産物W(貯留装置6上を搬送される時に蔕が下流側を向いているもの)が載せられたパレット7の磁性体17の磁気を検知するようになっている。したがって、例えば図2に示すように、長物農産物Wの蔕の向きを全て貯留装置6の搬送方向の上流側に向けるためには、磁性体17が磁化されているパレット7は、方向転換装置8の作動により反転させられ、磁化されていないパレット7はそのまま反転させずに下流側に搬送されることになる。
【0040】
方向転換装置8の下流側に設けられる端部揃え装置25は、互いに逆方向に傾動可能な一対の傾動板29を有している。この端部揃え装置25は、搬送コンベア19で搬送されて各傾動板29の位置に到達した一対のパレット7が、図示しない検出センサで検出された際に、各傾動板29の前端側と後端側が同時に傾動する如く構成されている。そして、この傾動板29の傾動により、例えば前方側のパレット7内の長物農産物Wがパレット7の前部側に揃えられ、後方側のパレット7内の長物農産物Wがパレット7の後部側に揃えられる。こうすることにより、2列等を一組として箱詰めする際に、箱内に長物農産物Wをスムーズに詰めることができる。
【0041】
前記箱詰装置9は、上下及び幅方向に移動可能な所定数のロッド31(一列6本×2列)を有し、このロッド31の下端には吸着盤32がそれぞれ取り付けられている。ロッド31は、図示しない間隔調整機構によって、図3の矢印ハ方向に移動すると共にその間隔が適宜調整され、吸着盤32で吸着して持ち上げた長物農産物Wを段ボール箱33内に箱詰めする。
【0042】
この箱詰装置9は、図示しないロボット制御部によって自動的に動作し、箱詰めロボットとして機能するが、ロッド31(吸着盤32)の数は図3の2列に限らず、例えば図8に示すように、4列のロッド31を同時に動作させるようにしても良いし、また図示しないが複数本で一列の吸着ユニットを用いて、これを多関節ロボットにより複数回繰り返し作動させ所定の形態に箱詰めするようにしても良い。
【0043】
箱詰装置9の端部下方には、段ボール箱33を支持する箱支持装置34が配設されている。この箱支持装置34は、垂直なレール35に上下動可能に配設された水平な箱載置板36を有し、この箱載置板36上に段ボール箱33が載置される。そして、長物農産物Wが箱詰めされた段ボール箱33は箱載置板36と共に下降させられて、箱支持装置34の下部に連結された製品搬送コンベア37上に移載され、この製品搬送コンベア37で所定位置まで搬送される。
【0044】
また、箱支持装置34の下部で製品搬送コンベア37と反対側には、空の段ボール箱33を箱支持装置34に供給する空箱降下装置38が接続されている。この空箱降下装置38は、その上部側に空箱搬送コンベア39が接続されると共に配函装置40が設けられ、配函装置40の作動により空箱搬送コンベア39上の段ボール箱33が空箱降下装置38にセットされて降下し、箱支持装置34に供給される。
【0045】
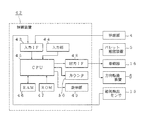
そして、パレット搬出装置5及び方向転換装置8等の動作は、例えば各仕分区分S1〜S3毎に設けられた制御装置42によって制御される。図6はこの制御装置42と前記各装置等の接続状態を示すブロック図であり、以下これについて説明する。
【0046】
制御装置42は、入力インターフェース43を介して入力されるデータを、ROM47に記憶されているプログラムにしたがって各種演算処理し、出力インターフェース48を介して所定の制御信号を出力するCPU45と、各種データ及び演算結果等を一時記憶するRAM46と、パレット7の数をカウントするカウンタ50と、各種条件等を入力する入力部44及び所定の表示をする表示部49等を有している。
【0047】
そして、この制御装置42の入力インターフェース43には、排出部4における長物農産物Wの仕分完了信号(排出される長物農産物Wがパレット7上で所定数になった時にこれを検知する信号)や、磁気検出センサ15の検知信号が入力されるようになっている。なお、上記仕分完了信号は、パレット7上に長物農産物Wが所定数載置されたことをセンサ等で検知する方法や、前記仕分区分別向き別の仕分信号を出力する図示しない処理装置により、1パレット分の仕分数をカウントして検知する方法等によって出力するようにしても良い。
【0048】
また、制御装置42の出力インターフェース48には、着磁器16、パレット搬出装置5(コンベアチェーン10駆動用モータ等)及び貯留装置6の方向転換装置8(回転駆動機構26)等が接続されている。なお、この制御装置42は、各仕分区分S1〜S3に対してそれぞれ設けられるが、例えば制御装置42を一個所に設けて、各仕分区分S1〜Snのそれぞれの制御を集中して行うようにしても良いし、制御装置42のカウンタ50も、CPU45が内蔵するカウンタを用いても良い。
【0049】
図7は、図2に示すように長物農産物Wの向きを全て一定方向に向けて箱詰めする場合の、方向転換装置8等の制御を示すフローチャートである。なお、このフローチャートは、上述したように、ROM47に記憶されているプログラムによってCPU45で実行される
【0050】
選別装置1の各部の電源が投入されて、例えば制御装置42の図示しない起動スイッチがオンすると、プログラムがスタート(S100)し、先ず磁気検出センサ15がオンか否かを判断(S101)する。この判断S101で「YES」の場合は、方向転換装置8に反転指示信号を出力(S102)して、上昇しているストッパ28で停止させられているパレット7を180度水平回転させる。一方、判断S101で「NO」の場合は、ストッパ下げ信号を出力(S103)して上昇しているストッパ28を下げ、パレット7を反転させることなく搬送コンベア19の下流側に搬送させる。
【0051】
そして、所定数終了か否かを判断(S104)し、所定数の長物農産物Wが処理された時点で一連の動作が終了(S105)する。これにより、パレット7上の長物農産物Wの向きが全て同一方向に揃えられることになる。このように、パレット7の向きが全て同一で良い場合は、制御装置42の動作が極めて簡略化される。
【0052】
図8は、段ボール箱33(以下、これを段ボール箱33aとする)に箱詰めされる4列の長物農産物Wのうち、前三列が後向きで4列目が前向きに箱詰めされる場合を示している。以下、この例における方向転換装置8等の制御を図9のフローチャートに基づいて説明する。プログラムがスタート(S200)すると、先ずカウンタ50の設定値Nsや段ボール箱33aに箱詰めされる長物農産物Wの段数等を設定(S201)する。
【0053】
このステップS201で設定する設定値Nsは、段ボール箱33a内の一段に箱詰めされる長物農産物Wの量、すなわち一段に使用されるパレット7の数であり、また段数は、段ボール箱33a内に長物農産物Wが複数段積み重ねられる場合の段数であり、これらの数値は、制御装置42の入力部44によって入力されてRAM46に記憶される。図8に示す例では、パレット7がパレット7A〜7Dの4個でありNs=4となる。
【0054】
ステップ201でNs=4が設定されると、CPU45は先ずカウンタ50のカウント数が4(Ns)か否かを判断(S202)する。1列目のパレット7Aの場合はカウンタ50が「1」であるため、この判断は「NO」となり、続いて磁気検出センサ15がオンか否かが判断(S203)される。この磁気検出センサ15がオンか否かの判断は、搬送コンベア19で磁気検出センサ15の位置まで搬送されたパレット7の磁性体17が着磁しているか否かで行われるもので、例えば図8に示すように、一方のパレット搬出装置5から矢印ホの如く搬送されたパレット7Lは、磁性体17が着磁されており判断S203で「YES」となり、パレット7を180度回転させる反転指示信号を方向転換装置8に出力(S204)する。
【0055】
この反転指示信号により、一方のパレット搬出装置5から矢印ホの如く搬送されストッパ28で停止させられているパレット7Lは、方向転換装置8で矢印ニの如く180度水平回転させられる。そして、このパレット7Lが180度回転すると、ストッパ下げ信号が出力(S207)されてストッパ28が下降し、反転されたパレット7Lが搬送コンベア19上を下流側に搬送され、パレット7Aの位置で待機する。なお、前述したように方向転換装置8のストッパ28は、通常上昇しており、例えば下げ信号がCPU45から出力された際に、所定時間下降しその後は元の位置に上昇する如く構成されている。
【0056】
ステップS207で方向転換装置8のストッパ28が下げられると、カウンタ50のカウント数を「−1」(S208)に、すなわち「3」にする。そして、カウンタ50が0か否かが判断(S209)され、1列目のパレット7Aの場合は、この判断S209で「NO」となりステップS202に戻る。
【0057】
次に、図8に示す2列目のパレット7Bのように向きを揃える場合で、例えば着磁器16の設置されていない上流側のパレット搬出装置5から矢印ヘの如く搬送コンベア19に搬送されてくるパレット7Rの場合は、判断S202で「NO」となって判断S203に進み、この判断S203において「NO」となり、ステップS207に進む。これにより、パレット7Rは方向転換装置8で反転されることなく、そのままの向きで搬送コンベア19の下流側に搬送されて、パレット7Bの位置で待機する。
【0058】
また、図8に示す3列目のパレット7Cのように向きを揃える場合で、例えば磁性体17が着磁されて矢印ト→ホの如く搬送されるパレット7Lの場合は、前記1列目のパレット7Aと同様に、判断S202で「NO」となり、判断S203で「YES」となって、ステップS204で反転させられて搬送コンベア19の下流側に搬送され、パレット7Cの位置で待機する。
【0059】
またさらに、図8に示す4列目のパレット7Dのように向きを揃える場合で、例えば磁性体17が着磁されずに矢印チ→ヘの如く搬送されるパレット7Rの場合は、判断S202で「YES」となり磁気検出センサ15がオンか否かが判断(S205)される。パレット7Rの磁性体17は着磁されていないため、判断S205で「NO」となりステップS206に進み、ステップS204と同様に反転指示信号が出力されて、パレット7Rが180度方向転換される。この判断S205で「YES」の場合は、ステップS207に進む。
【0060】
そして、ステップS202〜S209の繰り返しにより、4列(個)のパレット7A〜7Dが、搬送コンベア19の下流側に図8に示す向きで整列貯留されると、このパレット7A〜7D内の長物農産物Wが箱詰装置9の4列の吸着盤32によって一度に吸着されて、矢印ハ方向に移載され段ボール箱33a内に箱詰めされる。段ボール箱33a内に複数段で詰める場合は、上記吸着・箱詰めの動作を繰り返し行うことにより、段ボール箱33a内に長物農産物Wが4列複数段で詰められることになる。
【0061】
前記ステップS209で、4個のパレットの整列が完了すると、カウンタ50の値が0となりステップS209で「YES」となって、カウンタ50がリセット(S210)され、再び「Ns=4」に設定される。カウンタ50がリセットされると、ステップS201で設定した所定段数か否かが判断(S211)され、この判断S211で「NO」の場合、すなわち、長物農産物Wが所定段数段ボール箱33aに箱詰めされていない場合は、ステップS202に戻り、ステップS203以降を繰り返す。そして、段ボール箱33a内に長物農産物Wが4列で所定段数箱詰めされ、判断S211で「YES」になった時点で一連の動作が終了(S212)する。
【0062】
なお、このフローチャートは一例であって、例えばカウンタ50の数を設定値Nsから減算するのではなく、0から加算して設定値Nsになった時点でカウンタ50をリセットするようにしたり、あるいは方向転換装置8のストッパ28を、制御装置42の制御信号によって、上昇及び下降させるようにしても良い。
【0063】
このようにして、段ボール箱33a内に所定数の長物農産物Wが収容されたら、図3に示すように、箱支持装置34が作動して箱載置板36がレール35に沿って下降し、箱載置板36上の段ボール箱33aが製品搬送コンベア37上に移載されて搬送され、下流側の所定位置から搬送コンベア41で図示なしいトラック等に載せられる。
【0064】
また、長物農産物Wが箱詰めされた段ボール箱33aが、箱載置板36上から製品搬送コンベア37上に排出されると、空箱降下装置38が作動して、空の段ボール箱33が箱載置板36上に載せられ、この箱載置板36が上昇することによって、空の段ボール箱33が所定位置に再びセットされる。これらの動作は、箱詰装置9、空箱降下装置38及び空箱搬送コンベア37等を制御する図示しない制御装置によって行われる。
【0065】
また、空になり空パレットリターンコンベア21上に搬送されるパレット7は、脱磁器18によって磁性体17の磁気が消され、パレット搬出装置5に再び搬入されて使用される。
【0066】
このように上記実施例の長物農産物Wの選別装置1にあっては、選別コンベア2で横向きで搬送される長物農産物Wが、所定の仕分区分S1〜Snの2つの排出部4のうちのいずれか一方からパレット7上に排出され、パレット搬出装置5によって貯留装置6の搬送コンベア19上に合流しつつ供給されると共に、搬送コンベア19上のパレット7が、必要に応じて反転させられてその向きが所定に制御され、長物農産物Wが箱詰めされる箱詰装置9の位置まで搬送されるため、長物農産物Wを選別コンベア2から箱詰め位置まで仕分区分S1〜Snに応じてその向きを揃えた状態で搬送することができる。
【0067】
これにより、選別コンベア2上への長物農産物Wの供給時にその向きがとらわれることがなくなり、例えば自動供給装置によって供給することができる等、従来のような人手に頼った供給作業が不要となると共に、作業者によるバラツキや疲労による作業効率の低下等の影響を受けることがなくなる。その結果、選別コンベア2への長物農産物Wの供給作業を自動化できて、作業効率の大幅な向上が図れると共に、自動供給装置や計測処理技術の向上等にも容易に対応することができて、選別作業の自動化と高速化を図ることが可能になる。
【0068】
特に、各仕分区分S1〜Snに対応した貯留装置6の搬送コンベア19の下流側に、箱詰めロボットとしての箱詰装置9を設置することにより、長物農産物Wの選別コンベア2への供給から仕分け及び箱詰めまでの工程を略完全自動化することができて、選別作業の作業効率の一層の効率化が図れる。
【0069】
また、パレット7に設けた磁性体17と磁気検出センサ15等により、パレット7上の長物農産物Wの向きを識別することができると共に、この識別結果に基づいて搬送コンベア19上で方向転換装置8の作動によりパレット7を反転させて、段ボール箱33に長物農産物Wを所定の状態で収容することができるため、段ボール箱33への長物農産物Wの収容形態を所望の形態に設定することができる。
【0070】
その結果、長物農産物Wの種類や形状等に最も適した状態での箱詰めが可能になると共に、貯留装置6の下流側に待機しているパレット7内の長物農産物Wを、向きを変えることなくそのままの状態で箱詰めすることができる等、箱詰め作業の作業効率を向上させることができる。特に、この箱詰め作業を箱詰めロボットとしての箱詰装置9で自動的に行うことができるため、長物農産物Wの箱詰め作業の作業効率の一層の向上が図れると共に、箱詰めロボットの制御が簡単となる。
【0071】
さらに、仕分区分S1〜Sn毎に向きが異なる長物農産物Wをそれぞれ排出し得る一対の排出部4を設けているため、選別コンベア2から搬送されてくる長物農産物Wを、各向きに対応した位置のパレット7に素早くかつ確実に排出させることができる。また、一対の排出部4から排出された長物農産物Wをその向きが識別できるように載せて一つの搬送コンベア19上で搬送するので、設備効率を向上させることができる。
【0072】
また、貯留装置6の方向転換装置8の下流側に端部揃え装置25が設置されているため、箱詰めされた際に長物農産物Wの長手方向の端部が揃えられて、箱詰めがスムーズに行えると共に、良好な箱詰め状態を得ることが可能になる。またさらに、パレット7上の長物農産物Wの向きの識別は、パレット7の一部に磁性体17を設けると共に、着磁器16と磁気検出センサ15及び脱磁器18等を組み合わせることによって自動的に識別することができるため、パレット識別装置自体の構成が簡略化されると共に、制御装置42による制御が簡単となる等、選別装置1のコストダウン等が図れる。
【0073】
図10は、本発明に係わる選別装置の他の実施例を示す概略平面図である。なお、上記実施例と同一部位には同一符号を付しその詳細な説明は省略する。この実施例の選別装置51の特徴は、一対の排出部4で向きが2つに仕分けされた長物農産物Wの一方を、180度カーブコンベア52上を搬送させることにより、長物農産物Wの向きを一方の向きに揃えるようにしたものである。
【0074】
すなわち、例えば2条の選別コンベア2の判定装置3の下流側に、各仕分区分S1〜Sn毎に一対の排出部4を設け、この一対の排出部4の選別コンベア2の搬送方向イの上流及び下流側にソレノイド等からなる排出作動装置53a、53bをそれぞれ設ける。また、各排出作動装置53a、53bの下方には、選別コンベア2の搬送方向イと直交する方向で、互いに異なる方向に移動する引出コンベア54a、54bをそれぞれ設けると共に、この引出コンベア54a、54bの端部を180度カーブコンベア52で連結する。
【0075】
この選別装置51によれば、上流側の排出部4の排出作動装置53aから引出コンベア54a上に排出された長物農産物Wは、排出された向きのまま引出コンベア54a及び180度カーブコンベア52を介して反対側の引出コンベア54b上に搬送される。そして、この引出コンベア54bの搬送により長物農産物Wの向きは、下流側の排出部4の排出作動装置53bから引出コンベア54b上に排出された長物農産物Wの向きと同一となり、全ての長物農産物Wの向きが揃えられた状態で、引出コンベア54bで搬送される。
【0076】
この引出コンベア54bを、例えば前記貯留装置6の搬送コンベア19に接続することにより、長物農産物Wの箱詰めが行われる。この選別装置51においても、選別コンベア2上の長物農産物Wの向きを全て同一方向に自動的に揃えて箱詰めすることができる等、上記実施例と同様の作用効果を得ることができる。
【0077】
また、この選別装置51においては、長物農産物Wを一個ずつ向きを揃える場合について説明したが、例えば排出作動装置53a、53bの下方に、上記実施例のようなパレット7を搬入、排出可能に設けても良い。そして、一方のパレット7内に長物農産物Wが所定数収容された場合に、パレット7を引出コンベア54a及び180度カーブコンベア52で他方の引出コンベア52b上に搬送することにより、長物農産物Wの向きが全て同一方向に揃えられたパレット7を引出コンベア54bで下流側に搬送する。このように構成すれば、パレット7(長物農産物W)の向きを全て同一にしたい場合や、パレット7の向きが特定されない場合等の選別装置に使用することができる。
【0078】
なお、上記実施例においては、パレット7上の長物農産物Wの向きの識別を磁性体17と磁気検出センサ15及び着磁器16等によって行ったが、異なる他の方式として、例えばパレット7の適宜位置に固有情報を有するバーコードシール(図示せず)を貼着すると共に、方向転換装置8の上流側にバーコード読み取り器(図示せず)を設置し、一方の向きで排出された長物農産物Wが載せられたパレットのバーコードを例えば上記RAM46に一時記憶すると共に、他方の向きで排出された長物農産物Wが載せられたパレットと合流させて搬送し、方向転換装置8の手前のバーコード読み取り器で前記記憶されているバーコードを読み込むことによって、パレット7上の長物農産物Wの向きを識別するようにしても良い。
【0079】
このバーコードによるパレット7の識別装置にあっては、パレット7自体に向き以外の各種データを記憶させることができるため、制御装置42と適宜に接続することによって、選別作業に関する各種情報を管理制御することが可能になる。また、パレット識別装置の検知部(センサ)としては、磁気検出センサ15及びバーコード読み取り器に限らず、他の適宜のセンサを使用することも勿論可能である。
【0080】
また、上記実施例においては、一対の排出部4及びパレット搬出装置5並びに貯留装置6等を、各仕分区分S1〜Snのそれぞれに対応して設置する場合について説明したが、例えばこれらの装置を処理数の多い(仕分けされる量が多い)一つもしくは複数の仕分区分にのみ設置し、処理数の少ない仕分区分は例えば図10の装置等を使用することもできる。さらに、上記実施例における、選別装置1のライン構成、各コンベアの形態等も一例であって、各発明の要旨を逸脱しない範囲において種々変更可能であることはいうまでもない。
【0081】
【発明の効果】
以上詳述したように、請求項1記載の発明によれば、選別コンベア上の長物農産物の向きにかかわらず、選別コンベアで搬送されてくる長物農産物を仕分区分毎にその向きに応じて自動的に仕分けることができると共に、180度カーブコンベアによって全ての長物農産物の向きを同一方向に自動的に揃えることができるため、選別コンベアへの長物農産物の供給時にその向きにこだわる必要がなくなり、供給作業の作業効率を向上させることができると共に、選別ラインの自動化及び高速化に容易に対応することができる。
【0084】
また、請求項2記載の発明によれば、向きの揃えられた長物農産物が載せられたパレット上の長物農産物の向きを、向き識別手段の検知部がパレットの記憶部に記憶された長物農産物の向きを示す情報を検知することによってパレット個々に識別し、その識別結果に基づいてパレットを方向転換装置で水平方向に180度回転させるため、搬送コンベア上で必要とする長物農産物の向きを容易に得ることができ、種々の箱詰め形態に対応することができて、箱詰め作業の作業効率を向上させることができる。
【0086】
また、請求項3記載の発明によれば、向きの揃えられた長物農産物が載せられたパレット上の長物農産物の向きを、向き識別手段が、パレット識別標識検出手段によってパレットに設けられたパレット識別標識を検出した検出情報と、当該パレット内の長物農産物の向き情報とに基づいてパレット個々に識別し、その識別結果に基づいてパレットを方向転換装置で水平方向に180度回転させるため、搬送コンベア上で必要とする長物農産物の向きを容易に得ることができ、種々の箱詰め形態に対応することができて、箱詰め作業の作業効率を向上させることができる。
【0087】
また、請求項4記載の発明によれば、選別コンベア上に向きにこだわるこなく供給された長物農産物が、仕分区分及びその向きに応じて自動的に仕分けされて箱詰めされ、選別作業の略完全自動化を図ることができる。
【図面の簡単な説明】
【図1】本発明に係わる長物農産物の選別装置の一例を示す概略平面図
【図2】同その一つの仕分区分を示す平面図
【図3】同図2の正面図
【図4】同搬出コンベア及び搬入コンベアの動作説明図
【図5】同図4と同様の動作説明図
【図6】 同制御装置の接続状態を示すブロック図
【図7】同その動作を示すフローチャート
【図8】箱詰め状態の他の例を示す説明図
【図9】その動作を示すフローチャート
【図10】本発明に係わる長物農産物の選別装置の他の実施例を示す概略平面図
【符号の説明】
1・・・・・・・・・選別装置
2・・・・・・・・・選別コンベア
3・・・・・・・・・判定装置
4・・・・・・・・・排出部
5・・・・・・・・・パレット搬出装置
6・・・・・・・・・貯留装置
7・・・・・・・・・パレット
8・・・・・・・・・方向転換装置
9・・・・・・・・・箱詰装置
11・・・・・・・・搬出コンベア
12・・・・・・・・搬入コンベア
14・・・・・・・・パレット載台
15・・・・・・・・磁気検出センサ
16・・・・・・・・着磁器
17・・・・・・・・磁性体
18・・・・・・・・脱磁器
19・・・・・・・・搬送コンベア
25・・・・・・・・端部揃え装置
27・・・・・・・・パレット回転板
28・・・・・・・・ストッパ
29・・・・・・・・傾動板
34・・・・・・・・箱支持装置
37・・・・・・・・製品搬送コンベア
38・・・・・・・・空箱降下装置
42・・・・・・・・制御装置
45・・・・・・・・CPU
50・・・・・・・・カウンタ
51・・・・・・・・選別装置
52・・・・・・・・180度カーブコンベア
53a、53b・・・排出作動装置
54a、54b・・・引出コンベア
W・・・・・・・・・長物農産物
S1〜Sn・・・・・仕分区分
Claims (4)
- 長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って長物農産物の仕分区分にそれぞれ対応して設けられ該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、該一対の排出部にそれぞれ対応して設けられ各排出部から排出された長物農産物をそれぞれ所定方向に搬送する一対の搬出手段と、前記判定手段の判定結果に基づいて前記排出部を作動させる仕分制御手段と、を具備し、前記一対の搬出手段のうちの一方の搬出手段の終端側と他方の搬出手段の始端側とが180度カーブコンベアで接続されていることを特徴とする長物農産物の選別装置。
- 長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って長物農産物の仕分区分にそれぞれ対応して設けられ該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、前記判定手段の判定結果に基づいて所定の仕分区分別向き別の排出部を作動させる仕分制御手段と、前記一対の排出部にそれぞれ対応して設けられ該排出部の下方に該排出部で排出された長物農産物を載置するためのパレットを供給すると共に、長物農産物が載せられたパレットを所定方向に送り出す一対のパレット搬出装置と、該一対のパレット搬出装置で送り出される長物農産物入りのパレットを合流させて搬送する搬送コンベアと、該搬送コンベアで搬送されるパレット上の長物農産物の向きをパレット個々に識別する向き識別手段と、前記搬送コンベアの所定位置に設けられ搬送されてくるパレットを前記向き識別手段の識別結果に基づいて水平方向に180度回転させる方向転換装置と、を具備し、前記向き識別手段は、パレットに設けられ該パレット上の長物農産物の向きを示す情報が記憶された記憶部と、該記憶部に記憶された情報を検知する検知部とを有することを特徴とする長物農産物の選別装置。
- 長物農産物をその長手方向が搬送方向と略直交する横向きにして搬送する選別コンベアと、該選別コンベア上の長物農産物の仕分区分及び向きを判定する判定手段と、前記選別コンベアの搬送路に沿って長物農産物の仕分区分にそれぞれ対応して設けられ該仕分区分毎に長物農産物をその向きに応じて排出するように作動する一対の排出部と、前記判定手段の判定結果に基づいて所定の仕分区分別向き別の排出部を作動させる仕分制御手段と、前記一対の排出部にそれぞれ対応して設けられ該排出部の下方に該排出部で排出された長物農産物を載置するためのパレットを供給すると共に、長物農産物が載せられたパレットを所定方向に送り出す一対のパレット搬出装置と、該一対のパレット搬出装置で送り出される長物農産物入りのパレットを合流させて搬送する搬送コンベアと、該搬送コンベアで搬送されるパレット上の長物農産物の向きをパレット個々に識別する向き識別手段と、前記搬送コンベアの所定位置に設けられ搬送されてくるパレットを前記向き識別手段の識別結果に基づいて水平方向に180度回転させる方向転換装置と、を具備し、前記向き識別手段は、パレットに設けられたパレット識別標識を検出するパレット識別標識検出手段の検出情報と、当該パレット内の長物農産物の向き情報とに基づいて長物農産物の向きをパレット個々に識別するものであることを特徴とする長物農産物の選別装置。
- 前記搬送コンベアが、その下流側に箱詰めロボットを有し、搬送コンベアで搬送されてくる長物農産物が箱詰めロボットによって箱詰めされることを特徴とする請求項2または3のいずれかに記載の長物農産物の選別装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP15784697A JP3660102B2 (ja) | 1997-05-29 | 1997-05-29 | 長物農産物の選別装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP15784697A JP3660102B2 (ja) | 1997-05-29 | 1997-05-29 | 長物農産物の選別装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10328626A JPH10328626A (ja) | 1998-12-15 |
| JP3660102B2 true JP3660102B2 (ja) | 2005-06-15 |
Family
ID=15658645
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP15784697A Expired - Fee Related JP3660102B2 (ja) | 1997-05-29 | 1997-05-29 | 長物農産物の選別装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3660102B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4756215B2 (ja) * | 2005-04-12 | 2011-08-24 | 株式会社インターパック | 商品の自動段積包装装置 |
| JP5688710B2 (ja) * | 2010-11-01 | 2015-03-25 | ヤンマー株式会社 | 選果システム |
| CN104590840B (zh) * | 2015-01-21 | 2016-08-24 | 贵州博通科技有限公司 | 矩阵式分拣系统 |
| CN108674979A (zh) * | 2018-05-31 | 2018-10-19 | 无锡职业技术学院 | 自动分拣下料五自由度的码垛机械手 |
| JP7191462B2 (ja) * | 2018-10-16 | 2022-12-19 | 鈴茂器工株式会社 | シャリ玉処理装置 |
| CN109969776A (zh) * | 2019-04-30 | 2019-07-05 | 深圳市华溢智造科技有限公司 | 一种智能分拣教学机器人实训系统 |
| CN115583491B (zh) * | 2022-11-25 | 2023-03-10 | 江苏国衡环亚医疗科技有限公司 | 一种医用器械加工上料的信息自读式输送装置 |
| CN119117634B (zh) * | 2024-11-05 | 2025-07-18 | 邢台朝阳机械制造有限公司 | 基于锂电池加工用的盖帽上料结构 |
-
1997
- 1997-05-29 JP JP15784697A patent/JP3660102B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10328626A (ja) | 1998-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104010953B (zh) | 用于在物料处理设施中堆放容器的方法和装置 | |
| KR100997071B1 (ko) | Rfid를 이용한 물품 분류 시스템 | |
| JP3660102B2 (ja) | 長物農産物の選別装置 | |
| JP3779055B2 (ja) | 農産物の選別装置 | |
| JPH10236642A (ja) | 農産物を載せた受皿の搬送合流装置 | |
| JP2007014925A (ja) | 農産物選別装置 | |
| JPH08225115A (ja) | 青果物の選別方法及び装置 | |
| CN213612694U (zh) | 智能分拣系统 | |
| JP2003081223A (ja) | 物品計測移載装置 | |
| EP0452810A1 (en) | Transporting and processing apparatus for cheese-like yarn packages | |
| JP3660791B2 (ja) | 農産物の選別装置及びこの装置の運転方法 | |
| JPH0388603A (ja) | 物品の自動仕分け方法 | |
| JPH09267078A (ja) | 把持位置判別装置及び物体処理装置 | |
| JP2006068744A (ja) | 農産物選別装置 | |
| JP3321325B2 (ja) | 青果物の選別装置及び同装置に用いられるフリートレー | |
| JP3207835B2 (ja) | 青果物の選別装置の受皿 | |
| JP7148128B2 (ja) | 葉状農作物選別装置 | |
| JP3751140B2 (ja) | 果菜類の選別装置 | |
| JPH1190350A (ja) | 農畜産物の選別収集装置 | |
| JPH07313943A (ja) | 農産物選別機の取出装置 | |
| CN112474374A (zh) | 可拓展式分拣装置、其分拣方法及其控制系统 | |
| JPH0957217A (ja) | 食品の仕分け装置 | |
| KR0160098B1 (ko) | 자동선과장치 | |
| CN212284911U (zh) | 一种邮件快速分拣装置 | |
| JP3495778B2 (ja) | 長物野菜の選別箱詰装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041026 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050316 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080325 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090325 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313532 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090325 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090325 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090325 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100325 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110325 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110325 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120325 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120325 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130325 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |