JP3672731B2 - レンジファインダ装置 - Google Patents
レンジファインダ装置 Download PDFInfo
- Publication number
- JP3672731B2 JP3672731B2 JP10486598A JP10486598A JP3672731B2 JP 3672731 B2 JP3672731 B2 JP 3672731B2 JP 10486598 A JP10486598 A JP 10486598A JP 10486598 A JP10486598 A JP 10486598A JP 3672731 B2 JP3672731 B2 JP 3672731B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- laser
- light intensity
- light source
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Description
【発明の属する技術分野】
本発明は、物体の3次元形状の計測を行うレンジファインダ装置に関する。
【0002】
【従来の技術】
投影光と観察画像の三角測量に基づいて3次元形状計測を行うレンジファインダ装置としては、例えば、図25に示すようなものが提案されている。
【0003】
図25において、1A、1Bは波長のわずかに異なるレーザ光源、2は前記波長の異なるレーザ光源からのレーザ光を合成するハーフミラー、3は前記レーザ光源の光強度を制御する光源制御部、4はレーザ光を走査する回転ミラー、5は回転ミラーを制御する回転制御部、6は被写体、7はCCD上に像を結ぶためのレンズ、8A、8Bはレーザ光源の波長の光を分離する光波長分離フィルタ、9A、9Bはモノクロ画像を撮像するCCD、9Cはカラー画像を撮像するCCD、10A、10Bはモノクロカメラの信号処理部、11はカラーカメラの信号処理部、12はCCD9A、9Bによって撮影したレーザ光の強度から被写体の距離もしくは形状を計算する距離計算部、13は装置全体の同期を調整する制御部である。以下、このように構成されたレンジファインダ装置の動作について説明する。
【0004】
レーザ光源1A、1Bは波長のわずかに異なるレーザ光を発する。このレーザ光は、後述の回転ミラーの走査方向と垂直な光断面を有するライン光であり、回転ミラーが水平方向に走査する場合は垂直方向のライン光となる。これら2つの光源の波長特性を図26に示す。波長の近い2つの光源を用いるのは、被写体の反射率の波長依存性の影響を受けにくくするためである。レーザ光源1A、1Bから発せられたレーザ光はハーフミラー2によって合成され、回転ミラー4によって被写体6に走査される。
【0005】
このレーザ光の走査は、回転制御部5がフィールド周期で回転ミラー4を駆動することにより行われる。その際に、双方の光源の光強度を1フィールド周期内で、図27(a)に示すように変化させる。レーザ光強度の変化とミラー角の駆動とを同期させることにより、2つのレーザ光強度をCCD9A、9Bによりモニタしてその光強度比を算出することにより、一走査周期における時刻を測定することができる。例えば、図27(b)に示すように、光強度がIA0/IB0の場合には、走査時刻はt0と測定され、その測定値から回転ミラー4の回転角(φ)が判明する。
【0006】
このように、2つのレーザ光強度の比とミラー角(すなわち光源側から見た被写体の角度)とが1対1に対応させることにより、後述する距離計算部において、双方の光源の光を撮影した信号レベルの比から三角測量の原理により被写体の距離もしくは形状が計算される。
【0007】
レンズ7はCCD9A、9B、9C上に被写体の像を結ぶ。光波長分離フィルタ8Aは、光源1Aの波長の光を透過し、他の波長の光を反射する。光波長分離フィルタ8Bは、光源1Bの波長の光を透過し、他の波長の光を反射する。その結果、光源1A、1Bの光の被写体からの反射光はCCD9A、9Bにより撮影され、他の波長の光はカラー画像としてCCD9Cにより撮影される。
【0008】
光源A信号処理部10Aと光源B信号処理部10Bは、CCD9A、9Bの出力について通常のモノクロカメラと同様の信号処理を行う。カラーカメラ信号処理部11は、CCD9Cの出力について通常のカラーカメラの信号処理を行う。
【0009】
距離計算部12は、各光源の波長についてCCD9A、9Bにより撮影された信号レベルの比、基線長、画素の座標値から、各画素について距離計算を行う。
【0010】
図28(a)(b)は、その距離計算を図形的に説明する図である。同図において、Oはレンズ7の中心、Pは被写体上の点、Qは回転ミラーの回転軸の位置である。また、説明を簡単にするため、CCD9の位置を被写体側に折り返して示している。また、OQの長さ(基線長)をL、xz平面内でQから見たPの角度をφ、yz平面内でOからみたPの角度をωとすると、図計的な関係より、Pの3次元座標は以下の式で計算される。
【0011】
【数1】
【0012】
【発明が解決しようとする課題】
しかしながら、上記のような構成では、2つのレーザ光強度の双方を走査フィールド内で変化させているため、図27(b)に示すように、光強度比の変化率はリニアにならず、走査開始時刻と走査終了時刻とで曲線的に変動する。CCD9A、9Bにより撮影した画像データのノイズに起因するレーザ光強度比の誤差は距離もしくは形状の計測誤差の主な原因となるが、レーザ光強度比の変化率が一定でない場合には、ノイズに起因する光強度測定誤差が発生しやすいという問題がある。
【0013】
本発明はかかる問題点に鑑みてなされたものであり、光学系、信号処理系でのノイズの影響を低減し、計測精度を向上するレンジファインダ装置を提供することを目的とする。
【0014】
【課題を解決するための手段】
本発明は、上記課題を解決するために、以下の構成を採る。
【0015】
本発明は、1波長のレーザー光源に対する光強度変調信号に振幅が時間的に変化する高周波を重畳し、強度変調した前記レーザー光を回転ミラーにより被写体に走査し、被写体からの反射光をCCDにより撮像する一方、前記CCDの着目画素近傍での光強度分布について上限と下限の2つの包絡線検出と局所平均検出を行ない、前記2つの包絡線の差と前記局所平均値の比に基づいて光源から見た被写体への角度情報を計算し、前記着目画素の座標値に基づいて前記CCDから見た被写体への角度情報を計算し、計算した前記角度情報と基線長とを用いてフィールド期間毎に各画素について距離計測を行うものである。
【0016】
この構成により、1波長のレーザー光源による1回の走査からフィールド毎に各画素についての距離計測を行うことができる。
【0017】
また、本発明は、単一波長の光を発するレーザ光源からの光を被写体に走査させる走査手段と、前記走査手段の走査周期と同期して前記レーザ光の光強度を変化させ、かつ、振幅が時間的に変化する高周波を重畳する光強度制御手段と、前記被写体からの反射光から前記波長と同一波長の光を分離する波長分離手段と、分離した前記光を撮像するCCDと、前記CCDの着目画素近傍での光強度分布について上限と下限の2つの包絡線検出と局所平均検出を行ない、前記2つの包絡線の差と前記局所平均値の比に基づいて光源から見た被写体への角度情報を計算し、前記着目画素の座標値に基づいて前記CCDから見た被写体への角度情報を計算し、計算した前記角度情報と基線長とを用いてフィールド期間毎に各画素について距離計測を行う距離計測手段と、を具備するレンジファインダ装置である。
【0039】
【発明の実施の形態】
本発明のレンジファインダ装置は、複数の波長の光を発する光源からのレーザ光を被写体に走査させる走査手段と、この走査手段の走査周期と同期して前記レーザ光の光強度を変化させる光強度制御手段と、前記被写体からの反射レーザ光から前記複数の波長と同一波長の光を各々分離する波長分離手段と、前記分離した光の光強度比から前記走査手段における計測点の角度を算出し被写体までの距離計算を行う距離計算手段と、を具備する構成とした。
この構成により、レーザ強度比の誤差による走査手段における計測点の角度誤差を小さくすることができるため、光学系、信号処理系でのノイズの影響を低減し、計測精度を向上するレンジファインダ装置を得ることができる。
また、本発明は、上記レンジファインダ装置において、光強度制御手段は、走査周期の前半区間では、一方のレーザ光強度を一定にし、他方のレーザ光強度を直線的に変化させる一方、走査周期の後半区間では、一方のレーザ光強度を直線的に変化させ、他方のレーザ光強度を一定にするよう構成した。
この構成により、レーザ光強度比の変化率を全走査区間において常に一定にすることができるとともに、レーザ光強度の比の範囲を大きくとることができるので、ノイズの影響によるレーザ光強度比の計測誤差を最小限に抑えることができ、その結果正確に光源側から見た計測点の角度(φ)を決定できることとなる。
また、本発明は、上記レンジファインダ装置において、距離計算手段は、レーザ光強度の大小関係とレーザ光強度の比との双方から、走査手段における計測点の角度を決定するよう構成した。
この構成により、現在の走査点が、走査区間の前半、後半のいずれのどの点に存在するかが確実に検出できる。
また、本発明は、上記レンジファインダ装置において、光強度制御手段は、予め測定したノイズレベルの特性に応じてレーザ光強度を補正するよう構成した。
この構成により、予め測定した装置の光学系、信号処理系に起因するノイズを補正するようにレーザ光強度を制御することができ、ノイズの影響を更に低減し、計測精度を格段と向上するレンジファインダ装置を得ることができる。
また、本発明は、上記レンジファインダ装置において、距離計算手段は、着目画素近傍の複数の周辺画素におけるレーザ光強度比の平均値、重み付け平均値、または、着目画素と周辺画素とのメディアン値を用いて、着目画素におけるレーザ強度比を計算する構成とした。
この構成により、レーザ光強度比の一様な領域においてはレーザ強度比のノイズを低減でき、また、ランダムに生じるノイズについてはノイズレベルをn分の1(nは対象とする周辺画素数)にすることができ、計測精度の向上が図られる。
また、本発明は、上記レンジファインダ装置において、距離計算手段は、各光源のレーザー光の垂直方向の強度分布と各受光部の感度特性を考慮して光強度を補正し、補正後の光強度の比を用いて距離計算を行なう構成とした。
この構成により、2つのレーザー光源からのライン光の垂直方向の強度分布(垂直プロファイル)が一致しない場合でも、計測精度を保つことができる。
また、本発明は、上記レンジファインダ装置において、距離計算手段は、各光源のレーザー光の垂直方向の強度分布と各受光部の感度特性を考慮して光強度比を補正し、補正後の光強度比を用いて距離計算を行う構成とした。
この構成により、2つのレーザー光源からのライン光の垂直方向の強度分布(垂直プロファイル)が一致しない場合でも、計測精度を保つことができる。
また、本発明は、上記レンジファインダ装置において、前記被写体からの反射レーザ光を受光するカメラを有し、このカメラと光源とを、光源からの光線のカメラ視野内での軌跡であるエピポーラ線が平行になるような位置関係に配置する構成とした。
この構成により、基準距離における光強度もしくは光強度比の補正による距離測定精度 の改善効果が、被写体距離が基準距離から離れた場合にも得ることができる。
また、本発明は、上記レンジファインダ装置において、レーザ光の光強度を変化させる際に、レーザー光の強度変調信号に高周波を重畳する構成とした。
この構成により、スペックルノイズを低減し、距離測定精度を改善し測定可能距離範囲を拡大することができる。
また、本発明は、上記レンジファインダ装置において、走査手段は、ガルバノミラーとポリゴンミラーを用いることにより、レーザ光を被写体に走査させる構成とした。
この構成により、垂直方向の光強度比を一定にしたレーザー光走査を行え、光強度もしくは光強度比の補正を行わずに、距離計測を行うことができる。
また、本発明は、上記レンジファインダ装置において、波長分離手段は、撮像面に対して傾斜させて配置した干渉フィルターにより、波長分離を行なう構成とした。
この構成により、光源のコヒーレンスにより生じるモアレ縞の発生を低減することができる。
(実施の形態1)
以下、本発明の実施の形態1に係るレンジファインダ装置について、図面を用いて説明する。
【0040】
図1は、本発明の実施の形態1におけるレンジファインダ装置の概略構成を示すブロック図である。図1において、101A、101Bは波長のわずかに異なるレーザ光源、102は前記波長の異なるレーザ光源からのレーザ光を合成するハーフミラー、103は前記レーザ光源の光強度を制御する光源制御部、104はレーザ光を走査する回転ミラー、105は回転ミラーを制御する回転制御部、106は被写体、107はCCD上に像を結ぶためのレンズ、108A、108Bはレーザ光源の波長の光を分離する光波長分離フィルタ、109A、109Bはモノクロ画像を撮像するCCD、109Cはカラー画像を撮像するCCD、110A、10Bはモノクロカメラの信号処理部、111はカラーカメラの信号処理部、112はCCD109A、109Bによって撮影したレーザ光の強度から被写体の距離もしくは形状を計算する距離計算部、113は装置全体の同期を調整する制御部である。以下に上記構成の動作について説明する。
【0041】
101A、101Bは波長のわずかに異なるレーザ光(後述する回転ミラー104による走査方向と垂直な光切断面を持つライン光)を発する。この波長特性は、図10に示したものと同様である。波長の近い2つの光源を用いるのは、被写体の反射率の波長依存性の影響を受けにくくするためである。双方の光源から発せられたレーザ光はハーフミラー102によって合成され、回転ミラー104によって被写体106に走査される。
【0042】
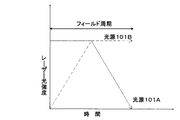
その際、双方のレーザ光源の光強度をフィールド周期内で、図2に示すように変化させる。つまり、走査周期の前半区間では、一方のレーザ光の光強度を一定にし、他方のレーザ光の光強度を直線的に変化させる一方、走査周期の後半区間では、一方のレーザ光強度を直線的に変化させ、後者のレーザ光強度を一定にする。更に、信号レベルの比を、レベル小の値/レベル大の値として計算するよう構成されている。
【0043】
従って、レーザ光強度比の変化率は、全走査区間において、常に一定となる。
【0044】
回転制御部105は、フィールド周期で回転ミラーを駆動しレーザ光を走査する。レーザ光強度の変化とミラー角の駆動を同期させることにより、後述する距離計算部において、2つのレーザ光強度の比と両者の大小関係から、光源側から見た計測点の角度を決定できる。
【0045】
図3は、制御部113からの垂直同期信号(a)と光源101A、光源101Bの強度変調信号(b)(c)、回転ミラー104の駆動信号(d)のタイミング図である。図示するように、光源101A、101Bの強度変調信号(b)(c)と回転ミラー104の駆動信号(d)を制御部113からの垂直同期信号(a)に同期させて、レーザ光強度比を変化させながらレーザ光を走査する。
【0046】
レンズ107はCCD109A、109B、109C上に被写体の像を結ぶ。光波長分離フィルタ108Aは、光源101Aの波長の光を透過し、他の波長の光を反射する。光波長分離フィルタ108Bは、光源101Bの波長の光を反射し、他の波長の光を透過する。その結果、光源101A、101Bの光の被写体からの反射光は各々CCD109A、109Bにより撮影され、他の波長の光はカラー画像としてCCD109Cにより撮影される。
【0047】
光源A信号処理部110Aと光源B信号処理部110Bは、CCD109A、109Bの出力について通常のモノクロカメラと同様の信号処理を行う。カラーカメラ信号処理部111は、CCD109Cの出力について通常のカラーカメラの信号処理を行う。
【0048】
距離計算部112は、各光源の波長についてCCD109A、109Bにより撮影された信号レベルの比、基線長、画素の座標値から、各画素について距離計算を行う。
【0049】
この距離計算は、既に図11により説明したと同様の方法により、式(1)によって計算される。
【0050】
式(1)のφについては、前述のとおり、CCD9A、9Bによりモニタしたレーザ光源1A、1Bの光強度比によって計算し、θ、ωについては画素の座標値から計算する。φの計算は従来と同様の方法により行うが、実施の形態1では、走査周期の半周期において一方のレーザ光強度を一定にし他方のレーザ光強度をリニアに変化させるようにするとともに、2つのレーザ光強度の比と両者の大小関係とから、1走査期間内での走査時刻を測定して回転ミラー104の回転角を算出するようにしたため、レーザ光強度比の変化率を全走査区間において常に一定にすることができるとともに、レーザ光強度の比の範囲を大きくとることができるので、ノイズの影響によるレーザ光強度比の計測誤差を最小限に抑えることができ、その結果正確に光源側から見た計測点の角度(φ)を決定できることとなる。2つのレーザ光強度の比と両者の大小関係とから回転ミラー104の回転角を算出するには、これらを予めテーブル化して用意しておき都度参照することにより処理の高速化を図り得る。
【0051】
このようにして求めた計測点の角度(φ)を用いて、式(1)に示した値のうち、x、y、zのすべてを計算すると形状を求めることができ、zのみであれば距離画像を求めることができる。
【0052】
以上のように実施の形態1によれば、レーザ強度比の変化率を角度によらず一定にすることにより、レーザ強度比の計測誤差による角度誤差、形状もしくは距離の計測誤差を低減することができる。
【0053】
(実施の形態2)
本発明の実施の形態2においては、カメラにより撮影されたビデオ信号のノイズレベルに応じて、レーザ光強度を走査周期内に変化させることにより、レーザ光強度比の誤差による角度誤差を小さくし、計測精度を向上させる例について示す。
【0054】
図4は、本発明の実施の形態2におけるレンジファインダ装置の構成図である。図4において、実施の形態1と同じ動作を行うものについては同一の符号を付し説明を省略する。実施の形態2は、光源制御部403と距離計算部412の動作についてのみ、実施の形態1と異なる。以下、この光源制御部403、距離計算部412の動作について説明する。
【0055】
光源制御部403は、CCD109A、109Bによって撮影されたビデオ信号のノイズレベルに応じて、角度誤差が最小となる強度変調を行う。この光源制御部403における強度変調について以下に説明する。
【0056】
距離計算部412におけるレーザ強度比の計算は、CCD109Aにより撮影された信号レベルをSA、CCD109Bにより撮影された信号レベルをSBとし、カメラのγ特性を1とすると、SB<SAとなっている場合は、理想的には以下の式(2)によって計算される。
【数2】
【数3】
【0057】
今、信号レベルに対して確率的に分布するノイズレベルの代表値をRMS値σとすると、距離計算部412におけるレーザ強度比は、レーザ光強度比が大きく見積もられる場合は、
【数4】
逆にレーザ光強度比が小さく見積もられる場合は、
【数5】
【0058】
従って、レーザ強度比の誤差の範囲は、式(4)式(5)と式(2)の差から、以下の式(6)に示す範囲となる。
【数6】
【0059】
レーザ光強度比と回転ミラーの駆動信号は、図3に示すように、フィールド周期内で時間と共に変化するため、観測されるレーザ光強度比の誤差は時間の誤差すなわち光源から見た角度の誤差となる。角度誤差を小さくするためには、レーザ光強度比の誤差に比例して光源1Bの強度が変化するようにすればよく、また、光源1Bの強度がフィールド周期の前半の期間で単調増加する必要があるという条件から、信号レベルに対するノイズレベルの分布について、角度誤差を最小化する光源1Bの強度変調関数IB(t)を式(7)を式(8)の境界条件で数値的に解くことにより決定できる。
【数7】
式(7)を式(8)の境界条件を満たすように解くことにより、フィールド周期内で角度誤差を一定にする強度変調関数を決定して角度誤差を最小化することができる。
【0060】
なお、式(7)からの強度変調関数IB(t)の決定方法として、2次関数、双曲線等の曲線当てはめを用いても、ほぼ同じ効果を得ることができること、勿論である。
【0061】
図5は、出力30mW、波長830nmのレーザ光源により1mの距離にある複数の色の色指標にレーザ光を一様なレーザパワー密度で投射し、赤外感度のあるCCDで撮影したビデオ信号について、画面中央部の領域において測定したノイズレベル(RMS値)を示すものである。このノイズレベルは、CCDの暗電流ノイズ、ショットノイズ、アンプのノイズ、スペックルノイズ等の複数のノイズ成分を含んだ形で測定されている。これらのノイズのうち支配的な成分は光源のコヒーレンスに起因するスペックルノイズである。
【0062】
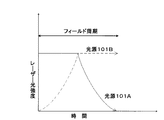
図6は、図5の1mの距離の被写体についての信号レベルとノイズレベルの関係に対して、角度誤差がフィールド周期内で一定となるように補正した強度変調信号の図である。被写体の距離が1m以外の場合には、被写体の距離に応じた信号レベルとノイズレベルの関係を予め測定するか、1mの被写体距離の関係から予測することにより、設定した距離での誤差を少なくして測定精度を改善できる。被写体距離が1m以外の時の信号レベルとノイズレベルの関係は、信号レベルが距離の2乗に反比例して減少するとし、また、信号レベルに対するノイズレベルの値は距離によらず同じであるとすることで予測できる。
【0063】
また、信号レベルの増加に伴うノイズレベルの増加(ショットノイズ)は、信号レベルの1/2乗に比例することが知られている。図7は、そのようなノイズレベルと信号レベルの関係を示している。図7のようなノイズレベルと信号レベルの関係の場合にも、上記の図5のノイズレベルと信号レベルの関係からの強度変調関数の決定方法と同じ方法によって、強度変調関数を決定できる。
【0064】
また、被写体の距離としては予め設定したものに限らず、前フィールドでの計測値の画像内の距離の平均値や、中央部を優先的に重み付けした重み付け平均を現フィールドでのノイズレベルを決定するための被写体距離としてもよい。
【0065】
以上のように実施の形態2によれば、レーザ光強度を、カメラにより撮影されたビデオ信号の信号レベルとノイズレベルとの関係に応じて補正した上で、走査周期内で変化させることにより、レーザ光強度比の誤差による角度誤差を小さくし、計測精度を向上させることができる。
【0066】
なお、実施の形態2におけるノイズの主成分であるスペックルノイズは、レーザー光源のコヒーレンスが原因で生じる。この光源のコヒーレンス性を減少させる方法について以下に説明する。
【0067】
図20は、高周波信号を重畳した光源の強度変調信号の説明図である。同図に示すように、光源の強度変調信号に高周波信号を重畳することにより、局所的な平均レベル(図20中の破線)を変化させずにレーザーパワーを高速に変化させることができる。レーザーパワーが変化するとレーザーの発振モードが変化し、スペックルの強度も変化する。したがって、もとの変調信号(60Hz)と比べて周波数の高い(例えば数kHz程度の)高周波を重畳することにより、スペックルノイズのレベルを低減することができ、このような方法も本発明に含まれる。
【0068】
(実施の形態3)
本発明の実施の形態3においては、着目画素におけるレーザ光強度比を近傍の複数の画素におけるレーザ光強度比を用いて計算することにより、レーザ光強度比の誤差を減少させ、計測精度を改善する例について示す。
【0069】
図8は、本発明の実施の形態3におけるレンジファインダ装置の構成図である。図8において、本発明の実施の形態1もしくは実施の形態2と同一の動作をするものについては、図1もしくは図4と同一の符号を付し説明を省略する。以下、光源制御部803、距離計算部812の動作について説明する。
【0070】
光源制御部803は、本発明の実施の形態1、実施の形態2における光源制御部と同一の動作をし、レーザ光源の光強度比を制御する。また、距離計算部812は、着目画素におけるレーザ光強度比を、周囲の複数の画素(例えば3×3画素)におけるレーザ光強度比の平均として計算し、その値を用いて実施の形態1、実施の形態2と同一の距離計算を行うようにした。
【0071】
実施の形態3では、その距離計算に際して、レーザ光強度比として、着目画素の周囲の複数の画素におけるレーザ光強度比の平均を用いることとしたため、レーザ光強度比の一様な領域においてレーザ強度比のノイズを低減できる。ランダムに生じるノイズについては、周囲のn×n画素におけるレーザ光強度比の平均を計算することで、ノイズレベルをn分の1にすることができ、その結果計測精度を改善できる。
【0072】
なお、距離計算部812におけるレーザ光強度比の計算は、着目画素とその周囲の画素の平均とするものに限る必要はない。例えば、平均値の差が大きいほど重みが小さくなる重み付け平均によって、レーザ光強度比を決定することにより、レーザ光強度比が急激に変化する物体輪郭付近における測定誤差を低減できる。また、着目画素とその周囲の画素のメディアン値としてレーザ光強度比を決定するようにしてもよい。
【0073】
また、距離計算部812において、レーザー光強度比を着目画素とその周囲の画素における値から計算するかわりに、着目画素における距離計測値を着目画素とその周囲の画素における距離計測値の平均値、重み付け平均値、もしくは、メディアン値として計算しても同様の効果を得ることができ、本発明に含まれる。
【0074】
以上のように実施の形態3によれば、着目画素におけるレーザ光強度比を近傍の複数の画素におけるレーザ光強度比を用いて計算することにより、レーザ光強度比の誤差を減少させ、計測精度を改善することができる。
【0075】
(実施の形態4)
本発明の実施の形態4においては、レーザー光源の垂直方向の強度分布(垂直プロファイル)による影響を信号処理により補正し、計測精度を改善する例について示す。
【0076】
図9は、本発明の実施の形態4におけるレンジファインダ装置の構成図である。図9において、本発明の実施の形態1〜3と同一の動作をするものについては、図1、図4もしくは図8と同一の符号を付し説明を省略する。以下、距離計算部901の動作について説明する。
【0077】
距離計算部901は、着目画素におけるレーザー光強度(すなわち輝度)を画素のy座標値に応じて補正し、補正後のレーザー光強度を用いて実施の形態1〜3と同一の距離計算を行うようにした。
【0078】
実施の形態4では、その距離計算に際して、レーザー光強度の垂直方向の分布(垂直プロファイル)を考慮してレーザー光強度を補正し、補正後のレーザー光強度から距離計算を行うため、2つのレーザー光源の垂直プロファイルが一致しない場合でも、計測精度を保つことができる。
【0079】
以下に、レーザー光強度の垂直方向の分布(垂直プロファイル)について説明する。
【0080】
図10は、レーザー光源とスリット光生成のための光学系の説明図である。図10において、1001はレーザー発信器、1002はレーザーダイオード、1003はコリメータレンズ、1004はシリンドリカルレンズである。
【0081】
レーザーダイオード1002は、レーザー発信器内の駆動回路によって駆動され一定波長の光を発する。
【0082】
図11は、レーザーダイオード1002の光強度の方向性を示す特性図である。同図に示すように、レーザーダイオードが発する光の強度は、ピーク強度を中心にしたガウス状の分布を持つ。
【0083】
コリメータレンズ1003は、レーザーダイオード1002の発するレーザー光を集光しビーム光を生成する。
【0084】
シリンドリカルレンズ1004は、コリメータレンズ1003が生成したビーム光を鉛直方向に拡大し、スリット光を生成する。図11に示すように、レーザーダイオードの発する光の強度はガウス状の分布をしているため、これを集光し垂直方向に拡大したスリット光の光強度は垂直方向に一様にはならず、水平方向の光強度分布については、分布幅が小さいため問題とはならない。
【0085】
図12は、2つのレーザー光源の垂直方向の光強度分布(垂直プロファイル)の一例を示す。レーザーダイオードの光強度の方向性は、個々のレーザーによって異なるため、2つのレーザー光源の垂直プロファイルは一致しない。
【0086】
本発明によるレンジファインダ装置では、レーザー強度比の水平方向の変化を用いて距離測定を行うため、垂直方向のレーザー強度比の変化は距離測定精度の誤差の原因となる。実施の形態4では、着目画素における光強度について、垂直プロファイルが平坦になる補正(即ち、図12において各データとピーク値P1もしくはP2との比を用いた補正)を行い、補正後の光強度を用いて距離計算を行うようにした。
【0087】
図13は、実施の形態4における距離計算部901の構成図である。同図において、1301A,1301Bは垂直プロファイル補正テーブル、1302は2つの光強度を光源からの角度情報に変換するLUT、1303は着目画素のx座標値をカメラからの角度情報に変換するLUT、1304は距離計算に必要な基線長(光源とカメラのレンズ中心間の距離)を記憶するメモリである。以下、上記構成の動作について説明する。
【0088】
垂直プロファイル補正テーブル1301A,1301Bは、光源A、光源Bそれぞれのレーザー光の垂直プロファイルの補正係数を保持する。補正係数は画像の各y座標毎に、図11中のピーク値P1もしくはP2と各垂直プロファイルデータの比として求める。垂直プロファイルデータは、距離一定の面に時間変調を行わないレーザー光を照射しこれを撮像することにより得る。着目画素のy座標値に応じて補正係数を乗ずることにより、垂直プロファイルの補正を行う。
【0089】
実施の形態4では、式(1)のzを求める計算式を変形した以下の式(9)を計算する。
【数9】
【数10】
【0090】
図14は2つのレーザー光強度の比と光源からの角度情報(数10)との関係を示す。図14の変換特性の計算方法について以下に説明する。
【0091】
まず、既知の一定距離の基準面に図2に示す時間変調をかけたレーザー光を投射し、これを撮像する。次に、撮像した画像に対して垂直プロファイル補正を行う。そして、カメラパラメータ(焦点距離と撮像面上での画素寸法)を用い、各画素について垂直プロファイル補正後の光強度の大小関係に応じて光強度比と光源からの角度情報式(10)の値を計算する。
【0092】
図19は、このような計算を行なった後の光強度比と角度情報式(10)の分布を示す説明図である。光強度に含まれるノイズのために、計算された光強度比と角度情報式(10)は幅をもった分布となる。レーザー光強度の比と光源からの角度情報式(10)との関係は、光強度の大小関係(光源101Aの光強度≦光源101Bの光強度の場合と光源101Aの光強度≧光源101Bの光強度の場合)に応じて、関数(例えば3次式)当てはめを行うことにより得られる。関数当てはめに際しては、図15において光強度比が1となる時の角度情報式(10)の平均値(図15中の点A)を通るという条件をつけることにより、光強度比1付近での精度を改善できる。すなわち、上記条件がない場合には、光強度の大小関係に応じて当てはめた2つの関数が光強度比1以下で交差したり、1以上で交差することとなり、光強度比1付近で距離測定精度が低下する。その理由は、光強度比1付近においては、光強度に含まれるノイズにより光強度の大小関係の逆転が起こり得るからである。
【0093】
LUT1303は、着目画素のx座標を式(11)で示すカメラからの角度情報に変換するために、1ライン分の値を保持する。
【数11】
【0094】
LUT1302、LUT1303からの角度情報とメモリ1304からの基線長値より、3角測量の式式(9)が計算でき、画像の各画素について距離zを計算できる。
【0095】
距離zの計算は、図13に示すように最終の除算以外、LUT等のメモリ参照と加算、乗算回路によって実現できる。また、最終の除算についても、入力の値に対する計算結果をメモリに保持することで、メモリ参照で実現可能である。したがって、各画素についての距離計算はビデオレートでの処理が十分可能である。
【0096】
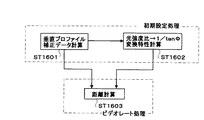
図16は実施の形態4における処理の手順を示す。初期設定処理として垂直プロファイル補正データを計算し(ST1601)、その結果を用いて光強度比から1/tanφへの変換特性を計算する(ST1602)。そして、ビデオレート処理として、上記垂直プロファイル補正データと光強度から1/tanφへの変換特性を用いて、距離計算を行う(ST1603)。
【0097】
以上のように実施の形態4によれば、距離計算に際して、レーザー光強度の垂直方向の分布(垂直プロファイル)を考慮してレーザー光強度補正し、補正後のレーザー光強度から距離計算を行うため、2つのレーザー光源の垂直プロファイルが一致しない場合でも、計測精度を保つことができる。
【0098】
なお、実施の形態4における垂直プロファイルの影響の補正では、光強度比を計算する前の段階で垂直プロファイルを平坦化するものについて述べたが、着目画素のy座標値に応じて光強度比を計算後に補正し、補正後の光強度比を角度情報に変換しても、数学的に同一の処理であり、本発明に含まれることは明らかである。
【0099】
なお、実施の形態4における垂直プロファイルの影響の補正では、基準面での垂直プロファイルに基づく補正を行っているため、被写体が基準面から離れると計測精度が劣化することが考えられる。この点を考慮して、被写体と基準面の距離によらない垂直プロファイル補正を実現する撮像面と光源の配置について以下に説明する。
【0100】
図17は、ライン光の撮像の説明図である。同図において、1701はレーザー光源、1702はコリメートレンズ、1703はシリンドリカルレンズ、1704は回転ミラー、1705はカメラである。レーザー光源1701から発せられたレーザー光は、コリメートレンズ1702によりコリメートされビーム光となり、シリンドリカルレンズ1703により鉛直方向にのみ拡散されてライン光となり、回転ミラー1704によって計測空間を走査される。ここで、ライン光のそれぞれの方向に進む光が、撮像時に画像中のどこに写るかを考える。
【0101】
図18は、図17に示した光の通る点a1,a2,b1,b2,c1,c2が、撮像時に画像中に写る位置を示している。図18は、空間中を進む光(3次元空間中の直線)が撮像(透視変換)により画像中の直線(2次元空間中の直線)に投影されることを示す。
【0102】
図18において、画像中に投影された直線は、画像内で左側が3次元空間中ではカメラから遠く、逆に右側が3次元空間中でカメラに近い。この直線は一般的には画像内で水平とはならないため、基準距離と被写体の距離が離れると、垂直プロファイル補正が正しく行えなくなる。
【0103】
ライン光撮像時に、ライン光に含まれるすべての方向に進む光の軌跡が画像内で水平になれば、基準距離での垂直プロファイルに基づく光強度補正を被写体の距離によらず適用できる。垂直プロファイル補正は、画像内でのy座標値に応じて行うためである。そのような光源と撮像面の配置について以下に説明する。
【0104】
図19は、空間内の直線の撮像面への射影の定式化の説明図である。同図において、Oはレンズ中心、Aは光源位置(扇状のライン光の要の位置)。また、簡単のため撮像面はZ=fの位置にあるとする。Aの位置ベクトルを(lx,ly,lz)、光源からの光の方向ベクトルを(dx,dy,dz)とする。光の通る直線は、
【数12】
【数13】
【数14】
【数15】
【数16】
【0105】
なお、実施の形態4における光強度補正では、垂直1ライン分の補正テーブルで実現できる垂直プロファイルの影響の補正について述べたが、1画面分の補正テーブルを用いることにより、着目画素のx座標値、y座標値に応じた補正(例えばレンズの周辺減光の補正)を同様の構成で行うことができ、本発明に含まれる。
【0106】
なお、実施の形態4では、レーザービーム光からライン光を生成し、ライン光を回転ミラー(ガルバノミラー)にて水平走査する構成としているが、レーザービーム光をガルバノミラーとポリゴンミラーを用いて2次元的に走査してもよい。
【0107】
図21は、ガルバノミラーとポリゴンミラーによるレーザービーム光の走査の説明図である。図21において、2101は、ガルバノミラー。2102はポリゴンミラーである。ガルバノミラー2101はレーザービーム光を垂直走査し、ポリゴンミラー2102はレーザービーム光を水平走査する。両者の走査により被写体空間でレーザー光を走査できる。実施の形態4においては、光源として2つのレーザー光源を用いているが、ガルバノミラーとポリゴンミラーによる走査により、レーザー強度比を垂直方向に一定に保つことが容易となり、垂直プロファイルの補正を行なわずに距離計測を行え、本発明に含まれる。
【0108】
なお、実施の形態5では距離zを計測するものについて述べたが、式(1)のx,y,zをすべて計測することにより、3次元座標値(x、y、z)の計測が行えることはもちろんである。
【0109】
なお、本発明の実施の形態1〜4による距離計測は、2波長の光源を用いた1フィールド毎の距離計測を行うようにしたが、前記実施の形態における各波長用のレーザー強度変調信号(2種類)をフィールド毎に切り替えて1つのレーザー光源の光強度を制御することにより、1波長の光源によって1フレーム毎の距離計測を行うようにしてもよい。
【0110】
(実施の形態5)
本発明の実施の形態5は、1波長の光源でフィールド毎に距離計算を行う実施の形態に言及する。図22は本発明の実施の形態5におけるレンジファインダ装置の構成図である。本発明の実施の形態1〜4の構成と同一の動作をするものについては、上記実施の形態とと同一の符号を付して説明を省略する。上記実施の形態との相違点は、光源制御部2201、レーザー光源2202、可視光を反射し赤外光を透過する赤外透過フィルター2203、レーザー光源2202の波長の光だけを透過する干渉フィルタ2204、距離計算部2205、装置全体の同期を制御する制御部2206を設けた点にある。
【0111】
光源制御部2201は、図23(a)もしくは(b)に示す強度変調信号によってレーザ光源2202を駆動する。図23に示す強度変調信号は、その包絡線(上下2つ)の差と局所的な平均の比がフィールド期間内の時間(すなわち回転ミラー104から見た被写体の角度)と一意に対応している。
【0112】
被写体106からの反射光は赤外透過フィルターによって赤外光と可視光に分離され、可視光はカラーCCD109Cにて撮像される。一方、赤外光は干渉フィルタ22204によって光源波長の光だけが透過され赤外感度のあるモノクロCCD109Aによって撮像される。
【0113】
なお、干渉フィルタ265をモノクロCCD109Aと平行に配置すると、レーザー光源のコヒーレンス性により、撮像した画像中にモアレ縞が発生するため、CCD109Aに対して傾けて配置する。
【0114】
干渉フィルタの透過波長特性は、入射光がフィルタ面に対して垂直な角度から離れて入射すると、透過波長ピークが短波長側にシフトするため、該シフト量を予め考慮し光源波長よりも長波長側に透過波長ピークのある干渉フィルタを用いる。
【0115】
距離計算部2205は、画像として得られた光強度の各ラインについて包絡線検出と局所平均検出を行い、距離を計算する。
【0116】
図24は、距離計算部2205の構成の1例を示すブロック図である。同図に示すように、距離計算部2205は、包絡線・局所平均検出部2401、包絡線の値(上下2つ)の差と局所平均値との比を、光源からの角度情報に変換するLUT2402、着目画素のx座標をカメラからの角度情報に変換するLUT2403、基線長の値を保持するメモリ2404、とを有する。
【0117】
光強度の包絡線は、着目画素近傍で光強度の極大値、極小値検出結果を空間的にそれぞれ補間することによって検出する。
【0118】
LUT2402、LUT2403の出力とメモリ2404の基線長の値から、各画素についての距離を計算することができる。
【0119】
以上のように、実施の形態5によれば1波長のレーザー光源を用いて、光強度変調信号の包絡線の差と平均光強度との比によって光源からの角度情報を与え、これとCCDからの角度情報と基線長による三角測量により、フィールド周期毎に各画素についての距離計測を行うことができる。
【0120】
また、レーザー光源の波長だけを透過する干渉フィルタをCCDに対して傾斜配置することにより、レーザー光のコヒーレンス性によるモアレ縞の発生を低減できる。
【0121】
【発明の効果】
以上説明したように、本発明によれば、一方のレーザ強度を一定に保ち、他方レーザ強度を直線的に変化させて、レーザ強度比をフィールド期間内で直線的に変化させることにより、レーザ強度比の変化率を角度によらず一定にでき、レーザ光強度比の計測誤差による角度誤差、形状もしくは距離の計測誤差を低減することができる。
【0122】
また、レーザ光強度を、カメラにより撮影されたビデオ信号の信号レベルとノイズレベルの関係に応じて補正した上で、走査周期内に変化させることにより、レーザ光強度比の誤差による角度誤差を小さくし、計測精度を向上させることができる。
【0123】
また、着目画素におけるレーザ光強度比を近傍の複数の画素におけるレーザ光強度比を用いて計算することにより、レーザ光強度比の誤差を減少させ、計測精度を改善することができる。
【0124】
また、距離計算に際して、レーザー光強度の垂直方向の分布(垂直プロファイル)を考慮してレーザー光強度補正し、補正後のレーザー光強度から距離計算を行うため、2つのレーザー光源の垂直プロファイルが一致しない場合でも、計測精度を保つことができる。
さらに、撮像系のレンズ中心と光源を結ぶ線分が、撮像面のx軸と水平になるように光源を配置することにより、基準距離と被写体との距離によらず垂直プロファイル補正を正確に行うことができる。
【0125】
また、レーザー光の走査にガルバノミラーとポリゴンミラーの双方を用いることにより、垂直プロファイル補正の不要なレンジファインダを構成できる。
【0126】
また、1波長のレーザー光源を用いて、光強度変調信号の包絡線の差と平均光強度との比によって光源からの角度情報を与え、これとCCDからの角度情報と基線長による三角測量により、フィールド周期毎に各画素についての距離計測を行うことができる。
【0127】
さらに、レーザー光源の波長だけを透過する干渉フィルタをCCDに対して傾斜配置することにより、レーザー光のコヒーレンス性によるモアレ縞の発生を低減でき、その実用的効果は大きい。
【図面の簡単な説明】
【図1】本発明の実施の形態1におけるレンジファインダ装置の構成を示すブロック図
【図2】実施の形態1におけるレンジファインダ装置のレーザ光源の強度変調の特性図
【図3】実施の形態1における動作のタイミング図
【図4】本発明の実施の形態2におけるレンジファインダ装置の構成を示すブロック図
【図5】実施の形態2における信号レベルとノイズレベルの関係を示す特性図
【図6】実施の形態2におけるレーザ光源の強度変調の特性図
【図7】形態2における信号レベルの1/2乗に比例して増加するノイズレベルの特性図
【図8】本発明の実施の形態3におけるレンジファンダ装置の構成を示すブロック図
【図9】本発明の実施の形態4におけるレンジファインダ装置の構成を示すブロック図
【図10】実施の形態4におけるレーザー光源からライン光を生成する光学系の説明図
【図11】実施の形態4におけるレーザーダイオードの方向特性を示す特性図
【図12】実施の形態4におけるライン光の垂直プロファイルの説明図
【図13】実施の形態4における距離計算部の構成図
【図14】実施の形態4におけるレーザー光強度と角度情報1/tanφの関係を示す特性図
【図15】実施の形態4における光強度比に対する角度情報1/tanφの分布を示す説明図
【図16】実施の形態4における処理の流れ図
【図17】実施の形態4におけるライン光の撮像の説明図(その1)
【図18】実施の形態4におけるライン光の撮像の説明図(その2)
【図19】実施の形態4における3次元空間内の直線の撮像面への射影の定式化の説明図
【図20】実施の形態4における高周波信号を重畳した光源の強度変調信号の説明図
【図21】実施の形態4におけるガルバノミラーとポリゴンミラーによるレーザービーム光の走査の説明図
【図22】本発明の実施の形態5におけるレンジファインダ装置の構成図
【図23】実施の形態5におけるレーザー光の強度変調信号の説明図
【図24】実施の形態5における距離計算部の構成を示すブロック図
【図25】従来のレンジファインダ装置の構成図
【図26】従来のレンジファインダ装置の光源の波長特性を示す特性図
【図27】従来のレンジファインダ装置の光源の強度変調の特性図
【図28】レンジファインダにおける計測原理図
【符号の説明】
101A、101B レーザ光源
102 ハーフミラー
103 光源制御部
104 回転ミラー
105 回転制御部
106 被写体
107 レンズ
108A、108B 光波長分離フィルタ
109A、109B モノクロCCD
109C カラーCCD
110A、110B モノクロカメラ信号処理部
111 カラーカメラ信号処理部
130 距離計算部
113 制御部
Claims (2)
- 1波長のレーザー光源に対する光強度変調信号に振幅が時間的に変化する高周波を重畳し、強度変調した前記レーザー光を回転ミラーにより被写体に走査し、被写体からの反射光をCCDにより撮像する一方、
前記CCDの着目画素近傍での光強度分布について上限と下限の2つの包絡線検出と局所平均検出を行ない、前記2つの包絡線の差と前記局所平均値の比に基づいて光源から見た被写体への角度情報を計算し、前記着目画素の座標値に基づいて前記CCDから見た被写体への角度情報を計算し、計算した前記角度情報と基線長とを用いてフィールド期間毎に各画素について距離計測を行う距離計測方法。 - 単一波長の光を発するレーザ光源からの光を被写体に走査させる走査手段と、前記走査手段の走査周期と同期して前記レーザ光の光強度を変化させ、かつ、振幅が時間的に変化する高周波を重畳する光強度制御手段と、前記被写体からの反射光から前記波長と同一波長の光を分離する波長分離手段と、分離した前記光を撮像するCCDと、前記CCDの着目画素近傍での光強度分布について上限と下限の2つの包絡線検出と局所平均検出を行ない、前記2つの包絡線の差と前記局所平均値の比に基づいて光源から見た被写体への角度情報を計算し、前記着目画素の座標値に基づいて前記CCDから見た被写体への角度情報を計算し、計算した前記角度情報と基線長とを用いてフィールド期間毎に各画素について距離計測を行う距離計測手段と、を具備するレンジファインダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10486598A JP3672731B2 (ja) | 1997-09-04 | 1998-04-15 | レンジファインダ装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25595197 | 1997-09-04 | ||
| JP9-255951 | 1997-09-04 | ||
| JP10486598A JP3672731B2 (ja) | 1997-09-04 | 1998-04-15 | レンジファインダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11142122A JPH11142122A (ja) | 1999-05-28 |
| JP3672731B2 true JP3672731B2 (ja) | 2005-07-20 |
Family
ID=26445241
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10486598A Expired - Fee Related JP3672731B2 (ja) | 1997-09-04 | 1998-04-15 | レンジファインダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3672731B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12589502B2 (en) | 2021-09-22 | 2026-03-31 | Kabushiki Kaisha Toshiba | Cargo-handling apparatus, control device, control method, and storage medium |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002131016A (ja) | 2000-10-27 | 2002-05-09 | Honda Motor Co Ltd | 距離測定装置、及び距離測定方法 |
| JP2009092479A (ja) * | 2007-10-05 | 2009-04-30 | Hexagon Metrology Kk | 3次元形状測定器 |
| JP5488953B2 (ja) * | 2008-09-17 | 2014-05-14 | 新日鐵住金株式会社 | 凹凸疵検査方法及び装置 |
| CN102029554B (zh) * | 2010-11-22 | 2013-05-08 | 浙江大学 | 基于扫频激光干涉的圆轨迹运动误差快速测量系统 |
| US9400246B2 (en) * | 2011-10-11 | 2016-07-26 | Kla-Tencor Corporation | Optical metrology tool equipped with modulated illumination sources |
| CN102589576B (zh) * | 2012-01-16 | 2014-05-07 | 徐从裕 | 一种提高光栅传感器测量精度的误差分离方法 |
| DE102015100706A1 (de) * | 2014-12-15 | 2016-06-16 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Reinigungsgerät |
-
1998
- 1998-04-15 JP JP10486598A patent/JP3672731B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12589502B2 (en) | 2021-09-22 | 2026-03-31 | Kabushiki Kaisha Toshiba | Cargo-handling apparatus, control device, control method, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11142122A (ja) | 1999-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11105617B2 (en) | Hybrid light measurement method for measuring three-dimensional profile | |
| JP7371443B2 (ja) | 三次元計測装置 | |
| US9435891B2 (en) | Time of flight camera with stripe illumination | |
| US6441888B1 (en) | Rangefinder | |
| JP4111592B2 (ja) | 3次元入力装置 | |
| US6600168B1 (en) | High speed laser three-dimensional imager | |
| US10419741B2 (en) | Systems and methods for compression of three dimensional depth sensing | |
| US9170097B2 (en) | Hybrid system | |
| EP0458168A2 (en) | Three dimensional color imaging | |
| JP7270702B2 (ja) | 深度感知システムおよび方法 | |
| CN104007550A (zh) | 光束扫描型显示装置 | |
| JP3672731B2 (ja) | レンジファインダ装置 | |
| CN118265889A (zh) | 利用由至少一个平行辐射源生成的结构光来测量场景的深度信息的方法和装置 | |
| JPH1194520A (ja) | 実時間レンジファインダ | |
| CN115390087A (zh) | 一种激光线扫描三维成像系统及方法 | |
| EP0882211B1 (en) | A method and apparatus for reducing the unwanted effects of noise present in a three-dimensional color imaging system | |
| JP7438555B2 (ja) | 三次元計測方法および三次元計測装置 | |
| JP3538009B2 (ja) | 形状計測装置 | |
| CN115150545B (zh) | 获取三维测量点的测量系统 | |
| US6373561B2 (en) | Device and method for detecting depth and color information of an object to be surveyed | |
| JP4317300B2 (ja) | レンジファインダ装置 | |
| CN117804342A (zh) | 一种三维扫描仪和三维扫描方法 | |
| JP3668466B2 (ja) | 実時間レンジファインダ | |
| Chen et al. | A light modulation/demodulation method for real-time 3d imaging | |
| CN116626688B (zh) | 一种消除多路径误差的itof测距系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050419 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050420 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080428 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| R370 | Written measure of declining of transfer procedure |
Free format text: JAPANESE INTERMEDIATE CODE: R370 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100428 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110428 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110428 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120428 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |