JP3676708B2 - 農作業機 - Google Patents
農作業機 Download PDFInfo
- Publication number
- JP3676708B2 JP3676708B2 JP2001226560A JP2001226560A JP3676708B2 JP 3676708 B2 JP3676708 B2 JP 3676708B2 JP 2001226560 A JP2001226560 A JP 2001226560A JP 2001226560 A JP2001226560 A JP 2001226560A JP 3676708 B2 JP3676708 B2 JP 3676708B2
- Authority
- JP
- Japan
- Prior art keywords
- onion
- support
- container
- base body
- surface support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 241000234282 Allium Species 0.000 description 85
- 235000002732 Allium cepa var. cepa Nutrition 0.000 description 85
- 230000032258 transport Effects 0.000 description 51
- 230000002950 deficient Effects 0.000 description 24
- 238000005520 cutting process Methods 0.000 description 19
- 238000001514 detection method Methods 0.000 description 16
- 238000003860 storage Methods 0.000 description 12
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000003795 desorption Methods 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images








Landscapes
- Apparatuses For Bulk Treatment Of Fruits And Vegetables And Apparatuses For Preparing Feeds (AREA)
Description
【発明の属する技術分野】
本発明は、作業時には農作物を収容体に適切に収容でき、非作業時には農作業機自体の移動、運搬等を容易にできる農作業機に関する。
【0002】
【従来の技術】
従来の農作業機は、例えば、農作物を収容する収容体の側面を支持する側面支持部および収容体の下面を支持する下面支持部を有するコンテナ載置台等の支持体を備え、この支持体は機枠に上下方向に回動可能に設けられている。そして、農作物の収容量に応じて支持体を下方向に回動させることで、農作物の損傷等を防止し、農作物を収容体に適切に収容できるようになっている。
【0003】
【発明が解決しようとする課題】
しかしながら、上記従来の農作業機では、作業時に農作物を収容体に適切に収容できるものの、非作業時には、機枠から大きく突出した支持体が邪魔となり、農作業機自体の移動、運搬等を容易にできないという問題がある。
【0004】
本発明は、このような点に鑑みなされたもので、作業時には農作物を収容体に適切に収容でき、非作業時には農作業機自体の移動、運搬等を容易にできる農作業機を提供することを目的とする。
【0005】
【課題を解決するための手段】
請求項1記載の農作業機は、機枠と、この機枠に設けられたベース体と、このベース体に上下方向に回動可能に設けられ、農作物を収容する収容体の側面を支持する側面支持体と、この側面支持体に設けられ、前記収容体の下面を支持する下面支持体とを備え、前記ベース体は、前記機枠に対して進出した進出状態と前記機枠に対して後退した後退状態とに設定可能となっており、前記下面支持体は、前記側面支持体と交差状に位置する交差状態と前記側面支持体と平行状に位置する平行状態とに設定可能となっており、作業時には前記ベース体が進出状態に設定されかつ前記下面支持体が前記側面支持体と交差状に位置する交差状態に設定され、非作業時には前記ベース体が後退状態に設定されかつ前記下面支持体が前記側面支持体と平行状に位置する平行状態に設定されるものであり、前記ベース体の進退および前記側面支持体の回動を行わせる共通の駆動手段を備えたものである。
【0006】
そして、作業時にはベース体を進出状態に設定できかつ下面支持体を側面支持体と交差状に位置する交差状態に設定でき、非作業時にはベース体を後退状態に設定できかつ下面支持体を側面支持体と平行状に位置する平行状態に設定できるので、作業時には農作物を収容体に適切に収容可能であり、非作業時には農作業機自体の移動、運搬等を容易に行うことが可能である。また、ベース体の進退および側面支持体の回動を行わせる共通の駆動手段を備えた構成であるから、ベース体を進退させる進退用駆動手段と側面支持体を回動させる回動用駆動手段とを別々に備えた構成等に比べて、構成が簡単になり、製造コストが低減する。
【0007】
請求項2記載の農作業機は、請求項1記載の農作業機において、駆動手段は、機枠および側面支持体間に設けられた1本のシリンダであるものである。
【0008】
そして、きわめて簡単な構成であるにも拘わらず、駆動手段である1本のシリンダによってベース体の進退および側面支持体の回動を確実に行うことが可能である。
【0009】
請求項3記載の農作業機は、請求項1または2記載の農作業機において、機枠を支持する走行手段を備え、ベース体が後退状態に設定されかつ下面支持体が側面支持体と平行状に位置する平行状態に設定された場合には、前記ベース体、前記側面支持体および前記下面支持体がそれぞれ前記走行手段の外端よりも内側に位置するものである。
【0010】
そして、ベース体、側面支持体および下面支持体をそれぞれ走行手段の外端よりも内側に位置させることができるので、非作業時に農作業機自体の移動、運搬等を確実に容易に行うことが可能である。
【0011】
請求項4記載の農作業機は、請求項1ないし3のいずれかに記載の農作業機において、農作物を搬送して収容体に向けて落下させる折畳み可能な搬送体を備えたものである。
【0012】
そして、農作物を搬送して収容体に向けて落下させる搬送体を折り畳むことができるので、非作業時に搬送体が農作業機自体の運搬、移動等の邪魔となることを防止可能である。
【0013】
【発明の実施の形態】
以下、本発明の農作業機の一実施の形態の構成を図面を参照して説明する。
【0014】
図5および図6において、1は農作業機で、この農作業機1は、略球状の本体部T1およびこの本体部T1から突出する細長状の可撓性の突出部である茎葉部T2を有する農作物、すなわち例えば玉葱T(図1参照)を処理する玉葱処理機等である。
【0015】
この農作業機1は、図5および図6に示すように、前後方向に長手方向を有する略細長状の機枠2を備え、機枠2の前端部には図示しない連結部であるトラクタ連結部が設けられ、機枠2の後端部にはこの機枠2を支持する左右一対の走行手段である車輪3が設けられており、機枠2はトラクタ連結部に連結した図示しないトラクタの牽引により車輪3を介して圃場上を必要に応じて走行可能となっている。
【0016】
そして、機枠2の前端部には、地干し後の玉葱Tを収容した収容コンテナ5から玉葱Tを取り出す取出手段6が設けられ、取出手段6によって取り出された玉葱Tは、供給手段(供給搬送手段)7、絡みほぐし・整列用の搬送手段(振動搬送手段)8、切断手段9および持上げ搬送手段10を順に経て、選別搬送手段11上に供給される。
【0017】
この選別搬送手段11上では、機枠2のステップ部13に立った作業者(図示せず)によって選別作業(玉葱Tを規格に合った良品と規格外の不良品とに分ける作業)が行われ、規格に合った玉葱Tは、搬送手段である良品用搬送手段14にて搬送され、この良品用搬送手段14の搬送終端部から落下し、外形略直方体の箱形状をなす収容体である良品用コンテナ15内に収容される。一方、規格外の玉葱Tは、不良品用搬送手段16にて搬送されて不良品用コンテナ17内に収容される。
【0018】
取出手段6は、図5および図6に示すように、収容コンテナ5を保持する側面視略L字状のコンテナ保持体21を備え、このコンテナ保持体21は、機枠2の保持体取付部22に昇降可能でかつ回動可能に取り付けられている。また、コンテナ保持体21にはシリンダ23のロッド23aの先端が連結されている。
【0019】
そして、図5の2点鎖線で示すように、ロッド23aがシリンダ本体23bから進出すると、コンテナ保持体21は、玉葱Tを収容した収容コンテナ5を保持したまま上昇するとともに左右方向の軸24を中心に回動し、その結果、玉葱Tが収容コンテナ5から落下するように取り出され、供給手段7上に傾斜状のガイド板25にて案内されつつ供給される。なお、ロッド23aを後退させると、コンテナ保持体21は図5の実線で示すもとの状態に戻る。
【0020】
供給手段7は、図1、図5および図6に示すように、取出手段6から取り出された玉葱Tを搬送始端側で受け取り、この受け取った玉葱Tを上り傾斜の搬送方向イに移動させた後、この玉葱Tを搬送終端部から下流の搬送手段8の搬送始端部に供給する供給コンベヤ装置等である。
【0021】
この供給手段7は、互いに離間対向した駆動軸31および従動軸32を備え、駆動軸31には供給手段7を駆動する駆動手段である例えば駆動モータ33が連結されている。
【0022】
また、駆動軸31の両端部に取り付けた駆動スプロケット34と従動軸32の両端部に取り付けた従動スプロケット35とには、一対の無端体であるチェーン36が巻き掛けられ、これら一対のチェーン36間には複数本の連結バー37が架け渡されている。
【0023】
さらに、複数本の連結バー37には、可撓性を有する無端状の搬送ベルトとしての波形板である波形ゴム板38が貼り付けられるように取り付けられ、この波形ゴム板38は両チェーン36間に回行可能に配置されている。この波形ゴム板38は、搬送方向イに波進行方向を有する断面波形状に形成されている。
【0024】
そして、駆動モータ33の作動により駆動軸31が駆動回転し、波形ゴム板38がチェーン36と一体となって回行すると、取出手段6から取り出されて波形ゴム板38上に載置された玉葱Tが、搬送方向イに搬送されて移動し、波形ゴム板38の搬送終端部から搬送手段8の搬送始端部に供給される。
【0025】
搬送手段8は、図1ないし図6に示すように、供給手段7の波形ゴム板38上から供給された玉葱Tを搬送始端部から受け入れ、この受け入れた玉葱Tを振動により下り傾斜の搬送方向ロに移動させながら、その玉葱Tの茎葉部T2の絡みをほぐしかつ搬送方向ロに沿って複数列に整列させ、その後に玉葱Tを搬送終端部から下流の切断手段9に送出する振動装置等である。
【0026】
この搬送手段8は、上面上に載置された玉葱Tに対して少なくとも搬送方向ロ成分を有する外力が働くように自らが振動する振動体である振動ホッパー等の搬送体41と、この搬送体41を振動させる振動発生体42とを備えている。
【0027】
この搬送体41は、機枠2に設けられた複数、例えば4本の支柱部44の上端部にばね部材であるコイルばね45を介して取り付けられており、この搬送体41は支柱部44によってコイルばね45を介して振動可能に支持されている。
【0028】
また、搬送体41は、水平面に対してやや傾斜し搬送方向ロを幅方向とする略矩形板状の底板部46を有し、この底板部46の長手方向両端部から落下防止用の側板部47が上方に向ってそれぞれ突出している。各側板部47は、搬送始端側の高さが搬送終端側の高さより高い所定形状に形成されている。また、底板部46の搬送始端側の幅方向端部からは、傾斜状の受け板部48が上方および供給手段7側に向って突出している。
【0029】
また一方、底板部46の上面には、可撓性を有する略矩形板状の搬送板としての例えばゴム製の波形板49が貼り付けられるように取り付けられ、底板部46の搬送終端部を除く部分の上面全体が波形板49にて覆われている。
【0030】
この波形板49は、搬送方向ロと交差つまり直交する方向に波進行方向を有する断面波形状をなし、搬送方向ロに沿って位置する整列用の複数列状(例えば10列状)をなす案内凹溝部50を有している。各案内凹溝部50は、茎葉部T2を略上方に向けて本体部T1の下部を収容した状態で玉葱Tを搬送方向ロに沿って案内し、これにより玉葱Tが例えば10列状に略整列した状態で移動する。
【0031】
また、底板部46の搬送終端部の上面には、上方に向って突出する複数の突出部材、すなわち例えば4つの略半球状の第1突出部材51と2つの略4分の1球状の第2突出部材52とが取り付けられ、これら全部で6つの突出部材51,52は、互いに等間隔を介して搬送方向ロと交差する方向に並んで配置されている。
【0032】
そして、第1突出部材51および第2突出部材52にて、玉葱Tの列数を下流の切断手段9に対応するように減少させる列数減少部53が構成されている。図3中矢印で示すように、列数減少部53との当接により玉葱Tの向きが変わり、例えば案内凹溝部50に沿って整列した10列状の玉葱Tが2分の1の5列状となって下流の切断手段9に送出される。
【0033】
振動発生体42は、例えば、搬送体41の底板部46の下面に固着された取付枠55と、この取付枠55に互いに離間対向した状態に取り付けられた複数、例えば2つの振動モータユニット等の振動発生ユニット56とにて構成されている。
【0034】
各振動発生ユニット56は、図1に示されるように、上下面を閉塞した略円筒状のケース57を有し、このケース57内にはローター58が収容配置され、このローター58の出力軸59に円板状のウエイト60が偏心状に取り付けられている。なお、ローター58の出力軸59の軸方向は鉛直方向に対してやや傾斜している。そして、振動発生ユニット56のローター58の作動によりウエイト60が出力軸59と一体となって駆動回転すると、振動発生体42から振動が発生し、コイルばね45の弾性変形に基づき搬送体41全体が振動する。
【0035】
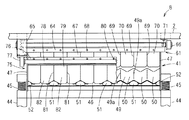
また一方、図1ないし図4に示されるように、搬送手段8の搬送始端側つまり上流部には、規制板である開閉板等の板状の搬送始端側回動体61が上下方向に回動可能に配置され、搬送始端側回動体61は、搬送方向ロに移動中の玉葱Tと接触しこの玉葱Tにて押されて上方向に回動し、自重で下方向に回動する構成となっている。
【0036】
なお、図4で示すように、玉葱Tと接触しない状態時には、板状の搬送始端側回動体61は鉛直面に沿って位置し、搬送始端側回動体61の下端部が本体部T1の直径と略等しい距離だけ波形板49から離反している。また、搬送手段8の搬送始端側には、搬送始端側回動体61による玉葱Tの移動規制に基づき玉葱Tを一旦貯留する貯留部62が、搬送始端側回動体61の供給手段7側の面、搬送体41の搬送始端側上面、側板部47の搬送始端側内面および受け板部48の上面にて囲まれるようにして区画形成されている。
【0037】
この搬送始端側回動体61は、細長板状の取付板64を有し、この取付板64は、機枠2に設けられた取付部65に支軸66を介して回動可能に取り付けられている。すなわち、この取付板64は機枠2の取付部65に支軸66を中心に回動可能に吊下げられている。
【0038】
この取付板64の下部には、水平方向に長手方向を有する細長矩形板状の可撓性を有するゴム板等の回動板67の上端部がボルト、ナット等の固定具68により固定的に取り付けられ、この回動板67が取付板64から垂れ下がっている。この回動板67は、図2から明らかなように、下端から略上端にわたる上下方向の複数の切れ目69が互いに平行に形成され、水平方向に分割され案内凹溝部50に対応して位置する複数の分割回動板部70を有した構成となっている。なお、切れ目69は、波形板49の山部49aに対応する位置に配置されている。
【0039】
また、機枠2の取付部65には、搬送始端側回動体61が玉葱Tにて押されて上方向に所定角度回動したことを検知して検知信号(供給停止信号)を出力する検知手段71が取り付けられている。この検知手段71は、例えば、搬送始端側回動体61の取付板64に対して接離するリミットスイッチ(レバースイッチ)等で、搬送始端側回動体61の取付板64が予め設定した設定角度をもって上方向に回動した際にオン状態となって検知信号を出力するものである。
【0040】
なお、検知手段71が検知信号を出力する際の搬送始端側回動体61の設定角度(開き角度)は調節可能となっており、例えば作業者は貯留部62の側板部47の上縁から玉葱Tがあふれない程度の設定角度に設定する。また、搬送始端側回動体61の上方向への回動はストッパを兼ねた検知手段71にて規制され、搬送始端側回動体61が上方向に必要以上に回動しない構成となっている。
【0041】
そして、検知手段71からの検知信号に基づいて供給手段7の駆動モータ33を制御しこの供給手段7による搬送手段8への玉葱Tの供給を停止させる制御手段72が、供給手段7に電気的に接続されている。なお、制御手段72は、検知手段71がオフ状態に復帰した際には供給手段7を作動させ、玉葱Tの供給を再開させる。
【0042】
一方、搬送手段8の搬送終端側つまり下流部には、玉葱Tの搬送方向ロへの移動を規制して玉葱Tを搬送方向ロに沿って案内凹溝部50上で並列させる規制板である開閉板等の板状の搬送終端側回動体75が上下方向に回動可能に配置されている。この搬送終端側回動体75は、搬送始端側回動体61と略同一構造のもので、搬送方向ロに移動中の玉葱Tと接触しこの玉葱Tにて押されて上方向に回動し、自重で下方向に回動する構成となっている。
【0043】
なお、図4で示すように、搬送終端側回動体75は搬送始端側回動体61より低い位置に配置されており、この搬送終端側回動体75は玉葱Tと接触しない状態時には鉛直面に対して搬送方向ロ側にやや傾斜した傾斜面に沿って位置し、搬送終端側回動体75の下端部が波形板49および列数減少部53に接触している。
【0044】
この搬送終端側回動体75は、細長板状の取付板76を有し、この取付板76は、機枠2に設けられた取付部77に支軸78を介して回動可能に取り付けられている。すなわち、この取付板76は機枠2の取付部77に支軸78を中心に回動可能に吊下げられている。
【0045】
この取付板76には、水平方向に長手方向を有する細長矩形板状の可撓性を有するゴム板等の回動板79の上端部がボルト、ナット等の固定具80により固定的に取り付けられ、この回動板79が取付板76から垂れ下がっている。この回動板79は、図2から明らかなように、下端から略上端にわたる上下方向の複数の切れ目81が互いに平行に形成され、水平方向に分割され案内凹溝部50に対応して位置する複数の分割回動板部82を有した構成となっている。切れ目81は波形板49の山部49aに対応する位置に配置されている。
【0046】
切断手段9は、図5、図6等に示すように、搬送手段8の搬送終端部からの玉葱Tをシュート90を介して搬送始端部から受け入れ、この受け入れた玉葱Tを搬送方向ハに向けて搬送しながら茎葉部T2の向きを下向きにし、その後下向きの茎葉部T2を切断し、茎葉部T2が除去された玉葱Tを搬送終端部から下流の持上げ搬送手段10に送出する複数列対応型の搬送切断装置等である。
【0047】
この切断手段9は、例えば、搬送方向ハと交差する方向に並んで位置する同一構造の5つのカッティングユニット91にて構成されている。各カッティングユニット91は、螺旋状の送り部92が外周面に形成された平行な2本の細長状の回転体93と、この回転体93の搬送終端部の近傍位置に配置された円盤刃94および受け盤95とを有している。
【0048】
そして、回転中の回転体93の搬送始端部上に載置された玉葱Tは、送り部92によって搬送方向ハに搬送されながらその茎葉部T2が下向きとなるように姿勢変更され、その後互いに圧接する円盤刃94および受け盤95によって下向きの茎葉部T2の上端部が切断され、茎葉部T2の除去された玉葱Tが持上げ搬送手段10の下端部に送出される。切断により本体部T1から分離された茎葉部T2は、搬出コンベヤ96によって図示しないコンテナに向けて搬出される。
【0049】
持上げ搬送手段10は、切断手段9からの玉葱Tを上方に搬送し、選別搬送手段11の搬送始端部に供給するリフトコンベヤ等であり、機枠2の後端部に配置されている。
【0050】
また、選別搬送手段11は、水平状に配置されたチェーン駆動式のローラーコンベヤ等で、両側のチェーン97間に橋架された複数本の搬送ローラ98を有し、各搬送ローラ98は、チェーン97とともに回行しかつ接触部99との接触で回転する構成とされている。このため、搬送ローラ98上で玉葱Tは搬送方向ニに移動しながら転がり、その結果作業者による選別作業が容易となる。
【0051】
さらに、不良品用搬送手段16は、選別搬送手段11の側部に連設されこの選別搬送手段11に沿って前後方向に移動可能な可動式のシュート104aを有し、このシュート104aの搬送終端部には連絡シュート104bを介してベルトコンベヤ105の搬送始端部が連設されている。なお、連絡シュート104bは前後方向に細長状の比較的開口面積の大きい受入口部である開口部106を有し、この開口部106の長手方向に沿って可動式のシュート104aが移動可能となっている。また、ベルトコンベヤ105の搬送終端部の下方には、不良品用コンテナ17が配置されている。なお、ベルトコンベヤ105は、非作業時に機枠2の側端から突出しないよう収容可能となっている。
【0052】
また、良品用搬送手段14は、機枠2の前後方向略中央部に配置され選別搬送手段11の搬送終端部に交差状に連設された水平状のスライドコンベヤ等の第1搬送部であるベルトコンベヤ101を有し、ベルトコンベヤ101は搬送方向切換え可能となっている。すなわち、このベルトコンベヤ101は、図示しない操作手段の操作に基づき玉葱Tを右側方に搬送する状態と玉葱Tを左側方に搬送する状態とに切換え可能となっている。
【0053】
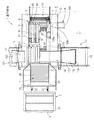
このベルトコンベヤ101の両端側は、図6および図7に示すように、機枠2の幅方向端部つまり側端から側方に向って突出するように配置され、この機枠2から突出した両端部には、玉葱Tをその自重により下り傾斜方向に沿って搬送して良品用コンテナ15に向けて落下させるための第2搬送部である左右一対の搬送体としての回動シュート102が水平方向である前後方向の回動軸110を中心として上下方向に回動可能に取り付けられている。すなわち、各回動シュート102は、回動軸110を中心に作業位置および非作業位置間で回動可能とされ、回動軸110を中心として非作業位置まで回動させることでベルトコンベヤ101の端部上方位置に折畳み可能となっている(図9および図10参照)。
【0054】
そして、図7に示されるように、各回動シュート102は、シュート本体111を有し、このシュート本体111の搬送終端部からガイド板112が下方に向って突出している。シュート本体111の側面には、取付部材113を介して緩衝部材であるガイド用のゴム板114が取り付けられ、ゴム板114およびガイド板112が、落下する玉葱Tを通過させる空間部115を介して互いに離間対向した状態に配置されている。
【0055】
また、各回動シュート102の下方位置には、それぞれ、機枠2の側端から突出する収容体支持装置であるコンテナ支持手段121上に載置されこのコンテナ支持手段121によって支持された良品用コンテナ15が配置されている。なお、良品用コンテナ15は、矩形板状の下面およびこの下面の周縁から上方に向って突出した4つの側面を有する上面開口状の箱形状をなす比較的大きいコンテナである。
【0056】
ここで、各コンテナ支持手段121は、図7に示すように、水平部122および垂直部123を有する水平方向にスライド可能なスライド体であるベース体124を備え、ベース体124は、機枠2に対して進出した進出状態と機枠2に対して後退した後退状態とに設定可能となっている。
【0057】
すなわち、ベース体124は、このベース体124の水平部122が機枠2に設けられた筒状部125内に水平方向に沿ってスライド可能に挿通され、水平部122に複数(例えば2つ)形成されたピン用孔126のうちの所望のピン用孔126に対して図示しない脱着ピンを装着することで進出状態および後退状態に設定固定できるようになっている。
【0058】
また、ベース体124の水平部122の機枠2側の自由端部にはストッパ用のピン127が固着され、このピン127は筒状部125に形成された凹部128に対して係脱可能となっている。ベース体124のピン127が筒状部125の凹部128に係合することで、ベース体124の進出が規制される。
【0059】
なお、ベース体124の進出距離は、コンテナ支持手段121に対して良品用コンテナ15を積み下ろしするための積降車であるフォークリフト(図示せず)の大きさに対応する距離に設定されている。すなわち、ベース体124の進出距離は、良品用コンテナ15の積み下ろしの際に、前後方向が農作業機1の前後方向と平行な状態(農作業機1の横に並んだ状態)にあるフォークリフトが農作業機1(例えば機枠2)と干渉しない距離に設定されている。そして、進出状態時にはベース体124の垂直部123は対応する車輪3の外端よりも外側つまり機枠2側とは反対側に位置し、後退状態時にはベース体124の垂直部123は対応する車輪3の外端よりも内側つまり機枠2側に位置する。
【0060】
また、ベース体124の垂直部123の上端部には、良品用コンテナ15の一側面(機枠2と対向する側面)を支持する縦長状の側面支持体131の上端部が水平方向である前後方向の回動軸132を介して取り付けられ、側面支持体131は回動軸132を中心として上下方向に回動可能すなわち例えば回動調節可能となっている。
【0061】
さらに、側面支持体131の下端部には、良品用コンテナ15の下面を支持する横長状の下面支持体133の一端部(機枠2と対向する側の端部)が水平方向である前後方向の回動軸134を介して取り付けられ、下面支持体133は一端部の回動軸134を中心として上下方向に回動可能となっており、他端部が自由端部となっている。
【0062】
すなわち、この下面支持体133は、回動軸134を中心として下方向に回動して側面支持体131と交差状である直交状に位置する交差状態と回動軸134を中心として上方向に回動して側面支持体131と平行状に位置する平行状態とに設定可能となっている。なお、図示しない固定手段によって下面支持体133を平行状態に固定できるようになっている。
【0063】
また、下面支持体133および側面支持体131間には、中間部の1箇所で折曲げ自在の連結アーム体135が設けられ、連結アーム体135の一端部である上端部が側面支持体131の上端部に回動可能に連結され、連結アーム体135の他端部である下端部が下面支持体133の中間部に回動可能に連結されている。
【0064】
さらに、機枠2および側面支持体131間には、ベース体124の機枠2に対する進退および側面支持体131の上下方向への回動を行わせる共通の駆動手段である1本の油圧式のシリンダ137が、これら機枠2および側面支持体131を跨ぐように設けられている。このシリンダ137は、筒状のシリンダ本体138およびこのシリンダ本体138に対して進退可能なロッド139にて構成されている。シリンダ本体138の基端部が機枠2の筒状部125の近傍位置に回動可能に連結され、ロッド139の先端部が側面支持体131の上下方向略中央位置に回動可能に連結されている。
【0065】
次に、上記一実施の形態の動作等を説明する。
【0066】
農作業機1の作業時には、取出手段6の作動により収容コンテナ5から供給手段7上に取り出された茎葉部T2付きの玉葱Tは、供給手段7によって載置状態で搬送方向イに搬送され、搬送手段8の搬送始端側に供給される。
【0067】
搬送手段8の搬送始端側に供給された複数の玉葱Tは、搬送手段8自体の振動により搬送方向ロに搬送され、隣接する玉葱Tの絡み合った茎葉部T2がほぐされかつ案内凹溝部50にて案内され、1個ずつに分離された状態で複数列に略整列させられる。
【0068】
この際、搬送終端側回動体75の回動板79が、やや上方向に回動して少しブレーキをかけるように玉葱Tの搬送方向ロへの移動を規制し、玉葱Tを搬送方向ロに沿って案内凹溝部50上で一旦並列させる。すなわち、回動板79の各分割回動板部82のブレーキ作用によって、玉葱Tが各案内凹溝部50上で互いに隣接して並んだ状態となる。
【0069】
そして、搬送終端側回動体75の回動板79が玉葱Tによる押圧でさらに上方向に回動することにより、玉葱Tが各分割回動板部82から1個ずつ吐き出され、この吐き出された玉葱Tは、列数減少部53にて当接して向きを変えてから、切断手段9の対応するカッティングユニット91の搬送始端部上に送出される。
【0070】
カッティングユニット91の搬送始端部上に送出された玉葱Tは、搬送方向ハに搬送されつつ茎葉部T2の向きが下向きにされ、その後、円盤刃94および受け盤95にて挟持されるようにしてその茎葉部T2が切断除去される。
【0071】
そして、茎葉部T2の除去された玉葱Tは、持上げ搬送手段10にて持上げ搬送された後、選別搬送手段11上に供給され、選別搬送手段11による搬送方向ニへの搬送中に、作業者によって選別作業が行われる。
【0072】
規格に合った玉葱Tは、良品用搬送手段14のベルトコンベヤ101上を経て、作業位置に位置した下り傾斜状の回動シュート102から空間部115を通過し、作業状態に設定されたコンテナ支持手段121によって支持された良品用コンテナ15内に向って落下し、この良品用コンテナ15内に収容される。
【0073】
この際、例えば、図7の2点鎖線で示すように、進出状態のベース体124に支持された側面支持体131が、シリンダ137のロッド139の進出により上方向に回動した傾斜状態で良品用コンテナ15の側面を支持し、かつ、この側面支持体131と交差状に位置する交差状態の下面支持体133が良品用コンテナ15の下面を支持し、その結果、良品用コンテナ15が、互いに交差状の側面支持体131および下面支持体133によって圃場から比較的離れた位置で傾斜状に支持されている。このため、回動シュート102から落下する玉葱Tの落下距離が比較的短くなり、玉葱Tが損傷するようなことがない。
【0074】
そして、作業が進むにつれて、作業者は、玉葱Tの収容量に応じて図示しない操作手段を操作してシリンダ137のロッド139を徐々に後退させ、コンテナ支持手段121の互いに交差状の側面支持体131および下面支持体133を回動軸132を中心として下方向に回動させ、最終的に図7の実線で示すようにコンテナ支持手段121によって良品用コンテナ15が圃場から比較的近い位置で水平状に支持された状態にする。
【0075】
次いで、作業者は、図示しない操作手段を操作してベルトコンベヤ101の搬送方向を切り換えた後、玉葱Tで満杯の良品用コンテナ15をコンテナ支持手段121から降ろし、代わりに空の良品用コンテナ15を載せて初期の傾斜状態に設定する。
【0076】
この際、コンテナ支持手段121に対する良品用コンテナ15の積み下ろしは図示しないフォークリフトで行うが、ベース体124が所定の進出距離をもって進出した進出状態にあり、互いに交差状の側面支持体131および下面支持体133が機枠2の側端からやや離れた位置にあるため、農作業機1の前後方向に沿って移動しながら積み下ろしを行うフォークリフトが機枠2等と干渉するようなことがない。
【0077】
一方、規格外の玉葱T(長玉、腐れ玉、皮むけ玉、変形玉等)は、不良品用搬送手段16のシュート104aおよび連絡シュート104b上を経て、ベルトコンベヤ105から不良品用コンテナ17に向って落下し、不良品用コンテナ17内に収容される。
【0078】
ここで、取出手段6の作動により供給手段7上に取り出される玉葱Tの量は一定とはならず、例えば、所定量を超えた量の玉葱Tが供給手段7上に取り出された場合においては、図1に示すように、玉葱Tが搬送手段8の貯留部62で複数段状に段積みされた状態となり、搬送始端側回動体61がその玉葱Tにて押されて上方向に設定角度回動すると、検知手段71がオン状態となって検知信号を制御手段72に出力する。すると、制御手段72の制御により供給手段7が停止し、供給手段7による搬送手段8への玉葱Tの供給が行われなくなる。貯留部62に複数段状に貯留された玉葱Tは、搬送始端側回動体61の回動板67の各分割回動板部70のブレーキ作用によって、1段状になって搬送方向ロに移動する。
【0079】
そして、貯留部62内の玉葱Tの量がある程度少なくなると、搬送始端側回動体61が自重で下方向に回動し、検知手段71がオフ状態となる。すると、制御手段72の制御により供給手段7が作動し、供給手段7による搬送手段8への玉葱Tの供給が再開される。このように、供給手段7は、検知手段71に連動して断続運転し、搬送手段8上の玉葱Tの量が一定に維持される。すなわち、検知手段71で自動的に定量供給が行われ、小人数で作業が行われる。
【0080】
また一方、作業終了後、例えば、農作業機1を圃場上から倉庫等の保管場所まで移動させる場合においては、例えば、作業者は、不良品用搬送手段16のベルトコンベヤ105を機枠2内に収容するとともに良品用コンテナ15をコンテナ支持手段121から降ろしてから、まず、図8に示すように、シリンダ137のロッド139をやや後退させることで、ベース体124を後退状態に設定し、側面支持体131および下面支持体133を機枠2の側端にやや接近させる。
【0081】
続いて、作業者は、図9に示すように、手動操作で、対応する回動シュート102をベルトコンベヤ101の端部上方位置に折り畳んだ後、連結アーム体135を折り曲げながら、下面支持体133を側面支持体131に対して折り畳むように回動軸134を中心として上方向に回動させ、側面支持体131と平行状に位置する平行状態に設定する。
【0082】
すると、図10に示すように、後退状態のベース体124と互いに平行状の側面支持体131および下面支持体133とがそれぞれ車輪3の外端よりも内側つまり機枠2側に位置した状態、すなわち、コンテナ支持手段121が機枠2近傍位置に寄せられた非作業状態になり、このため、側面支持体131および下面支持体133が農作業機1自体の移動の邪魔となるようなことがない。
【0083】
なお、下面支持体133を平行状態に設定してからベース体124を後退状態に設定してもよい。また、コンテナ支持手段121を作業状態にもどすには、例えば、下面支持体133を交差状態に設定してからベース体124を進出状態に設定したり、ベース体124を進出状態に設定してから下面支持体133を交差状態に設定したりする。
【0084】
このようにして、上記一実施の形態によれば、作業時にはコンテナ支持手段121のベース体124を進出状態に設定できかつ下面支持体133を側面支持体131と交差状に位置する交差状態に設定でき、非作業時にはベース体124を後退状態に設定できかつ下面支持体133を側面支持体131と平行状に位置する平行状態に設定できるので、作業時には、玉葱Tの損傷を防止しかつ農作業機1とフォークリフトとの干渉を防止しつつ玉葱Tを良品用コンテナ15内に適切に収容でき、また、非作業時には、コンテナ支持手段121を車輪3の外端よりも内側に配置できるため、例えば農作業機1を倉庫等の保管場所まで容易に移動でき、例えば農作業機1をトラック等の運搬車で容易に運搬できる。
【0085】
また、ベース体124の進退および側面支持体131の回動を行わせる共通のシリンダ137を備えた構成であるから、ベース体124を進退させる進退用駆動手段と側面支持体31を回動させる回動用駆動手段とを別々に備えた構成等に比べて、構成を簡単にでき、製造コストを低減できる。
【0086】
さらに、玉葱Tを搬送して良品用コンテナ15内に向けて落下させる回動シュート102を折り畳むことができるので、非作業時に回動シュート102が農作業機1自体の運搬、移動等の邪魔となることを防止できる。
【0087】
また、搬送手段8の上流部の搬送始端側回動体61の回動に応じて制御手段72が供給手段7の駆動モータ33を制御することにより供給手段7による玉葱Tの供給量を制限するので、例えば作業者が農作物の量を監視して供給手段7を手動操作するような必要がなく、搬送手段8の搬送体41上において玉葱Tの定量的な流れを容易に実現できる。
【0088】
さらに、この搬送始端側回動体61のブレーキ作用に基づく段数減少機能によって、玉葱Tの定量的な流れをより一層確実に実現でき、よって、搬送手段8で玉葱Tの茎葉部T2の絡みを確実にほぐすことができ、かつ、切断手段9の切断にそなえて適切に整列できる。また、搬送手段8の下流に位置する選別搬送手段11による玉葱Tの均一搬送により、無駄のない選別作業ができる。
【0089】
さらに、搬送手段8の下流部の搬送終端側回動体75のブレーキ作用に基づく並列機能によって、搬送手段8の搬送終端部から玉葱Tを切断手段9の搬送始端部に向けて安定的に送出することができる。よって、例えば搬送始端側回動体61からすり抜けた玉葱T等が、勢いよく切断手段9に転がったり、切断手段9の搬送始端部以外の位置に送出されたりするようなこと等を防止でき、切断手段9で茎葉部T2を適切に切断できる。
【0090】
また、この搬送終端側回動体75が案内凹溝部50に対応して位置する複数の分割回動板部82を有した構成であるから、例えば搬送終端側回動体75を1枚状の回動板で構成した場合等に比べて、玉葱Tの大きさの違いによる悪影響を受けにくくできる。よって、例えば一の案内凹溝部50上を比較的大きな玉葱Tが移動してきた場合に、その一の案内凹溝部50と隣接する他の案内凹溝部50上での玉葱Tの流れがはやくなること等を防止できる。
【0091】
なお、コンテナ支持手段121の側面支持体131に対する下面支持体133の回動軸134を中心とする回動を駆動手段で行うようにしてもよい。また、作業時における交差状の側面支持体131および下面支持体133の回動軸132を中心とする下方向への回動は、玉葱Tの収容量を検知する検知手段の信号により自動的に行うようにしてもよい。
【0092】
【発明の効果】
請求項1記載の発明によれば、作業時にはベース体を進出状態に設定できかつ下面支持体を側面支持体と交差状に位置する交差状態に設定でき、非作業時にはベース体を後退状態に設定できかつ下面支持体を側面支持体と平行状に位置する平行状態に設定できるので、作業時には農作物を収容体に適切に収容でき、非作業時には農作業機自体の移動、運搬等を容易にできる。また、ベース体の進退および側面支持体の回動を行わせる共通の駆動手段を備えた構成であるから、ベース体を進退させる進退用駆動手段と側面支持体を回動させる回動用駆動手段とを別々に備えた構成等に比べて、構成を簡単にでき、製造コストを低減できる。
【0093】
請求項2記載の発明によれば、きわめて簡単な構成であるにも拘わらず、駆動手段である1本のシリンダによってベース体の進退および側面支持体の回動を確実に行うことができる。
【0094】
請求項3記載の発明によれば、ベース体、側面支持体および下面支持体をそれぞれ走行手段の外端よりも内側に位置させることができるので、非作業時に農作業機自体の移動、運搬等を確実に容易にできる。
【0095】
請求項4記載の発明によれば、農作物を搬送して収容体に向けて落下させる搬送体を折り畳むことができるので、非作業時に搬送体が農作業機自体の運搬、移動等の邪魔となることを防止できる。
【図面の簡単な説明】
【図1】 本発明の農作業機の一実施の形態を示す側面図である。
【図2】 同上農作業機の搬送手段を搬送下流側からみた図である。
【図3】 同上農作業機の搬送手段の平面図である。
【図4】 同上農作業機の搬送手段の側面図である。
【図5】 同上農作業機全体を示す側面図である。
【図6】 同上農作業機全体を示す平面図である。
【図7】 同上農作業機のコンテナ支持手段を示す一部拡大正面図である。
【図8】 同上農作業機のコンテナ支持手段の動作説明図である。
【図9】 図8に続く動作説明図である。
【図10】 図9に続く動作説明図である。
【符号の説明】
1 農作業機
2 機枠
3 走行手段である車輪
15 収容体である良品用コンテナ
102 搬送体としての回動シュート
124 ベース体
131 側面支持体
133 下面支持体
137 駆動手段であるシリンダ
T 農作物である玉葱
Claims (4)
- 機枠と、
この機枠に設けられたベース体と、
このベース体に上下方向に回動可能に設けられ、農作物を収容する収容体の側面を支持する側面支持体と、
この側面支持体に設けられ、前記収容体の下面を支持する下面支持体とを備え、
前記ベース体は、前記機枠に対して進出した進出状態と前記機枠に対して後退した後退状態とに設定可能となっており、
前記下面支持体は、前記側面支持体と交差状に位置する交差状態と前記側面支持体と平行状に位置する平行状態とに設定可能となっており、
作業時には前記ベース体が進出状態に設定されかつ前記下面支持体が前記側面支持体と交差状に位置する交差状態に設定され、非作業時には前記ベース体が後退状態に設定されかつ前記下面支持体が前記側面支持体と平行状に位置する平行状態に設定されるものであり、
前記ベース体の進退および前記側面支持体の回動を行わせる共通の駆動手段を備えた
ことを特徴とする農作業機。 - 駆動手段は、機枠および側面支持体間に設けられた1本のシリンダである
ことを特徴とする請求項1記載の農作業機。 - 機枠を支持する走行手段を備え、
ベース体が後退状態に設定されかつ下面支持体が側面支持体と平行状に位置する平行状態に設定された場合には、前記ベース体、前記側面支持体および前記下面支持体がそれぞれ前記走行手段の外端よりも内側に位置する
ことを特徴とする請求項1または2記載の農作業機。 - 農作物を搬送して収容体に向けて落下させる折畳み可能な搬送体を備えた
ことを特徴とする請求項1ないし3のいずれかに記載の農作業機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001226560A JP3676708B2 (ja) | 2001-07-26 | 2001-07-26 | 農作業機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001226560A JP3676708B2 (ja) | 2001-07-26 | 2001-07-26 | 農作業機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003038151A JP2003038151A (ja) | 2003-02-12 |
| JP3676708B2 true JP3676708B2 (ja) | 2005-07-27 |
Family
ID=19059356
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001226560A Expired - Fee Related JP3676708B2 (ja) | 2001-07-26 | 2001-07-26 | 農作業機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3676708B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5856388B2 (ja) * | 2011-05-17 | 2016-02-09 | 訓子府機械工業株式会社 | 収穫玉葱処理装置 |
| JP7743113B1 (ja) * | 2024-08-02 | 2025-09-24 | 株式会社アイファーム | 加工対象物の選別・搬送装置 |
-
2001
- 2001-07-26 JP JP2001226560A patent/JP3676708B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003038151A (ja) | 2003-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0960556A2 (en) | A production method for lawn sod rolls and a device to perform the method | |
| WO2017001749A1 (fr) | Dispositif et méthode de chargement d'un magasin | |
| JP3676708B2 (ja) | 農作業機 | |
| JP7825674B2 (ja) | 作業車 | |
| JP4323734B2 (ja) | 農作業機 | |
| EP1222845B1 (fr) | Procédé pour séparer des mottes cubiques, dispositif pour la mise en oeuvre du procédé et machine de plantation de plantes en mottes comportant un tel dispositf | |
| JP2002193425A (ja) | 農作物搬送装置および農作業機 | |
| JP4871077B2 (ja) | 作物収穫機 | |
| JP3971876B2 (ja) | 収容状態修正装置 | |
| US6272769B1 (en) | Apparatus and method for conveying of fruits over a rollerbed | |
| KR100463760B1 (ko) | 반도체 패키지 적재장치 | |
| KR102481092B1 (ko) | 생산성이 향상된 과일의 가공 및 포장 시스템 | |
| JP4048805B2 (ja) | 受け渡し設備 | |
| JP2002284117A (ja) | シュート装置 | |
| JP3700691B2 (ja) | 自走型野菜収穫機 | |
| JP3559521B2 (ja) | 球状野菜収穫機 | |
| FR2537903A1 (fr) | Dispositif de presentation de pieces a usiner | |
| JP2004208521A (ja) | 野菜収穫機 | |
| RU2820872C2 (ru) | Установка и способ для подачи прутков | |
| KR20180116789A (ko) | 농작물 수확장치 | |
| JP2003334053A (ja) | 野菜処理施設 | |
| JP2001204224A (ja) | 葉菜類収穫機 | |
| JP3661325B2 (ja) | 結球野菜収穫機 | |
| JP2003334054A (ja) | 野菜処理施設 | |
| JP2565631Y2 (ja) | 選果コンベアの青果物取出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040818 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050413 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050428 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090513 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100513 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110513 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130513 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140513 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |