JP3676881B2 - 工具移動装置 - Google Patents
工具移動装置 Download PDFInfo
- Publication number
- JP3676881B2 JP3676881B2 JP14455096A JP14455096A JP3676881B2 JP 3676881 B2 JP3676881 B2 JP 3676881B2 JP 14455096 A JP14455096 A JP 14455096A JP 14455096 A JP14455096 A JP 14455096A JP 3676881 B2 JP3676881 B2 JP 3676881B2
- Authority
- JP
- Japan
- Prior art keywords
- tool
- cam
- socket member
- nut runner
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/22—Feeding members carrying tools or work
- B23Q5/32—Feeding working-spindles
- B23Q5/323—Feeding working-spindles cam-operated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/02—Driving main working members
- B23Q5/027—Driving main working members reciprocating members
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
- Automatic Tool Replacement In Machine Tools (AREA)
Description
【発明の属する技術分野】
この発明は、ナットランナーや工作機械のドリル等の工具を上下左右の所定の門形軌道に沿わせて往復移動させる工具移動装置に関する。
【0002】
【従来の技術】
自動組立機械や工作機械等で使用される工具を、鉛直な上下方向と水平な左右方向を含む門形軌道上を往復移動させる場合、上下動用のシリンダと左右動用のシリンダの計2台のシリンダを使用するのが普通である。例えば、図12に示すように、自動車エンジンのシリンダヘッド1にベアリングキャップ2をナットランナー4でボルト締めする場合、ナットランナー4を2台のシリンダ61、62で定ストロークずつ上下左右に移動させている。
【0003】
ボルト3は、例えば図13に示すように左右に8本ずつが内外2列に配置される。右側8本のボルト3は内側列mの4本と外側列nの4本であり、左側8本のボルト3は内側列m’の4本と外側列n’の4本である。右側の内側列mの各ボルト3の真上に計4台のナットランナー4が配置され、左側の内側列m’の各4本のボルト3の真上にも同様に計4台のナットランナー4が配置される。右側4台のナットランナー4が一括して上下動シリンダ62と左右動シリンダ61で上下左右移動され、左側4台のナットランナー4も同様に一括して上下動シリンダ62と左右動シリンダ61で上下左右移動される。
【0004】
図12の右側各4台のナットランナー4と左側各4台のナットランナー4は、互いに同期して同速で上下左右移動して、内側列m、m’のボルト3、…を同時に締め付け、次に外側列n、n’のボルト3、…を同時に締め付ける。このボルト締め動作を右側4台のナットランナー4の動作で説明する。
【0005】
内側列mの4本のボルト3の真上の定位置から4台のナットランナー4が上下動シリンダ62の作動にて降下し、各ナットランナー4のソケット部材5が対応する4本の内側列mのボルト3の頭部に嵌合する。各ナットランナー4のソケット部材5を回転させる回転駆動部6を作動させてソケット部材5でボルト3の締め付けを完了すると、上下動シリンダ62が作動してナットランナー4が元の定位置まで上昇する。次に、左右動シリンダ61が作動して、各ナットランナー4を外側列nの4本のボルト3の真上の定位置まで移動させ、続いて上下動シリンダ62が再度作動して各ナットランナー4を上下動させ、外側列nのボルト3の締め付けが行われる。
【0006】
以上のナットランナーは、自動車エンジン製造のボルト締め付け工程で使用される。自動車エンジン製造工程においては、ボルト締めされたシリンダヘッドとベアリングキャップにクランクシャフト取付け用の穴開け加工をした後、ベアリングキャップをシリンダヘッドから外してクランクシャフトを組付け、再度シリンダヘッドにベアリングキャップをボルト締めする工程がある。この工程では、シリンダヘッドにボルト締めされたベアリングキャップからボルトを緩めるのにボルト緩め専用のナットランナーが使用される。かかるボルト緩め専用のナットランナーにおいても、上記同様な2台の上下動シリンダと左右動シリンダで上下左右移動が行われている。
【0007】
【発明が解決しようとする課題】
上記のボルト締め付け用やボルト緩め用のナットランナーのソケット部材のような工具の上下左右移動は、上下左右に定ストローク移動する度に、リミットスイッチや光電スイッチ等の位置センサーを使って工具の移動完了確認ないし位置確認動作が行われ、この位置確認後に次の動作が行われる。このような工具の移動後の位置確認動作は、工具の移動を正確に行う上で必要であるが、位置確認から次動作の指令までの時間が1回の工具上下左右移動に要するサイクルタイムにおけるロスタイムとなり、工具の上下左右の移動の高速化、サイクルタイムの短縮化を難しくしている。
【0008】
この発明の目的とするところは、工具の所定の上下左右往復移動時のロスタイムを短くしてサイクルタイムを短縮した工具移動装置を提供することにある。
【0009】
【課題を解決するための手段】
この発明は、工具を所定位置から定ストロークで上下左右の門形軌道を往復移動させる工具移動装置であって、後述の1つの軸回転駆動源と左右動用の第1カムと上下動用の第2カムを使用することで、上記目的を達成するものである。
【0010】
即ち、この発明の工具移動装置は、装置全体を支持する支持フレームと、支持フレームに工具左右方向に往復移動可能に設置された左右移動テーブルと、工具を支持して前記左右移動テーブルに工具上下移動方向に往復移動可能に支持された工具支持体と、左右移動テーブルに設置された回転駆動軸及びこの回転駆動軸を定角度往復回転させる軸回転駆動源と、回転駆動軸に固定された第1カムと支持フレームの間に設置されて、回転駆動軸による第1カムの回転力を左右移動テーブルの左右移動力に変換するカムフォロアを備えた左右駆動機構と、工具支持体に固定された第2カムと回転駆動軸の間に設置されて、回転駆動軸と一体に回転して第2カムを介して工具支持体を上下往復移動させるカムフォロアを備える。
【0011】
ここで、上記の左右駆動機構は、左右移動テーブルの回転駆動軸に固定された第1カムの回転力を左右移動テーブルの左右移動力に変換するレバー等を備えた構造である。また、上記の上下駆動機構は、回転駆動軸と一体に回転して工具支持体の第2カムを上下動させるカムフォロア等を備えた構造である。このような一対のカムと上下左右各々の駆動機構を単体の回転駆動軸とその回転駆動源で動作させることで、工具の上下左右移動時の各移動点での位置確認動作が必要でなくなり、サイクルタイムの短縮が可能となる。
【0012】
また、この発明においては、工具支持体に支持される工具が単数に限らず、工具支持体に複数の工具と、この複数の工具を各別に作動させる複数の工具駆動部を支持したものが実用上有効である。
【0013】
また、上記発明におけるナットランナー適用の工具移動装置の場合、ナットランナーがソケット部材とこのソケット部材を回転駆動させる回転駆動部を上下に配置した構成で、複数の各ナットランナーにおけるソケット部材の回転中心と、回転駆動部の回転軸中心線が平行に離隔するように、ソケット部材と回転駆動部をオフセット配置すると共に、ソケット部材に同軸にして上下相対移動可能にワーク突き落とし用ロッドを貫通させ、ソケット部材が上下駆動機構で上昇したときにロッドの上端を押し下げてロッドの下端でソケット部材の下端部に詰まったボルト等のワークを突き落とすストッパーを、左右移動テーブル側に固定配置しておくことが可能である。
【0014】
ここで、上記ストッパーを備えた工具移動装置は、ナットランナーでボルトを緩めるものに有効である。即ち、ナットランナーのソケット部材で定位置のボルトを緩めてソケット部材を離す場合、緩められたボルトがソケット部材に詰まる等してソケット部材から離れずに付着して持ち上げられる不具合が発生することがある。そこで、ソケット部材に同軸にワーク突き落とし用ロッドを貫通させ、このロッドの上端をソケット部材の上下駆動機構による上昇時にソケット部材真上のストッパーに当接させ、ストッパーでロッドを相対的に突き落として、ロッドの下端部でソケット部材に詰まったボルトを突き落とすようにする。このような詰まったボルトの突き落とし手段としてのストッパーは、左右移動テーブル側に固定した平板等の簡単なもので十分となり、ボルト緩め専用のナットランナーにおけるボルト突き落とし機構が簡略化される。
【0015】
【発明の実施の形態】
以下、図1乃至図7を参照して第1の実施例を、図8乃至図11を参照して第2の実施例を説明する。
【0016】
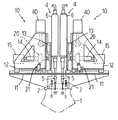
第1の実施例は、本発明をボルト締め専用のナットランナーの上下左右移動装置に適用したものである。図1及び図2は、図12及び図13のシリンダヘッド1にベアリングキャップ2を計16本のボルト3で締め付ける装置が示される。図1装置に示されるナットランナー4は、図12と同一のものが上下左右移動して、まず内側列m、m’の4本ずつのボルト3を締め付け、次に外側列n、n’の4本ずつのボルト3を締め付ける。内側列mの4本のボルト3の真上の4台のナットランナー4が、本発明実施例の工具移動装置10で一体化されて同時駆動し、同様にして他の内側列m’の4本のボルト3の真上の4台のナットランナー4が別の工具移動装置10で一体化されて同時駆動する。これら左右一対の工具移動装置10、10は、左右対称の同一構造で対称動作をするもので、以下、図1右側の工具移動装置10を主体に説明する。
【0017】
工具移動装置10で上下左右移動させられる4台のナットランナー4は、ソケット部材5と回転駆動部6で構成される。この場合のナットランナー4はボルト締め付けに使用され、ソケット部材5と回転駆動部6が上下に同軸に配置される。各ナットランナー4の回転駆動部6が共通の工具支持体13に支持され、工具支持体13が左右移動テーブル12に上下動可能に支持される。左右移動テーブル12は水平テーブルで、工具移動装置10の全体を支持する支持フレーム11の上に左右移動可能に設置される。
【0018】
工具移動装置10は、4台のナットランナー4を単一の軸回転駆動源15と回転駆動軸14で上下左右に移動させる。回転駆動軸14は、左右移動テーブル12上に工具左右移動方向に平行にして回転可能に設置され、回転駆動軸14の外側(右側)端部に軸回転駆動源15が設置される。軸回転駆動源15は、シリンダの往復直線運動を回転運動に変換するロータリアクチュエータ等であり、左右移動テーブル12上に固定されて回転駆動軸14を定角度範囲(本実施形態では180°)で往復回転させる。
【0019】
図3及び図4に示すように、回転駆動軸14の一部に第1カム20が固定され、第1カム20と支持フレーム11の間に左右駆動機構21が設置される。また、回転駆動軸14の先端に隣接して位置する工具支持体13に第2カム30が固定され、第2カム30と回転駆動軸14の間に上下駆動機構31が設置される。
【0020】
第1カム20と左右駆動機構21は、回転駆動軸14の回転力で左右移動テーブル12を左右移動させる。第1カム20は、例えば外周に第1カム溝22を有する真円の円形カムで、回転駆動軸14に同軸に固定される。第1カム溝22は、図5の円周方向180°の展開図に示すように、第1カム20の円周方向と平行をなす2条の内側円周溝22L及び外側円周溝22Rと、各円周溝22L、22Rの端を直線状に連結するで傾斜溝22Sを有する。
【0021】
左右駆動機構21は、第1カム20の第1カム溝22に定方向から嵌挿されたカムフォロア23を有する複合レバー機構で、図4に示すように、第1レバー24と連結シャフト25と第2レバー26を備える。連結シャフト25は、左右移動テーブル12上に工具左右移動方向と直交方向水平に配置され、左右移動テーブル12に固定された軸受27で回転可能に支持される。連結シャフト25の内側端に第1レバー24の下端部が固定され、第1レバー24の上端部にカムフォロア23が回転可能に設置される。連結シャフト25の外側端部は、左右移動テーブル12から突出して、この外側端部に第2レバー26の上端部が固定される。第2レバー26の下端部は、支持フレーム11上の固定ブロック28にピン29にて回転可能に支持される。
【0022】
回転駆動軸14で第1カム20を回転させると、第1カム溝22に定方向から嵌合するカムフォロア23が第1カム溝22の円周溝22L又は22Rと傾斜溝22Sの間を相対移動して、第1レバー24が連結シャフト25を中心として工具左右移動方向に回転揺動する。第1レバー24の回転で連結シャフト25が一体となって回転し、この回転で第2レバー26が連結シャフト25を中心として回転揺動しようとするが、第2レバー26の下端部が支持フレーム11にピン29で連結されているので、結果的に第2レバー26の回転揺動力が連結シャフト25と軸受27を介して左右移動テーブル12に伝達されて、左右移動テーブル12が支持フレーム11に対して左右移動する。すなわち、第1レバー24と第2レバー26を一体形の「てこ」と見立てた場合、ピン29が支点、カムフォロア23が力点、軸受27が作用点となる。左右移動テーブル12の移動方向は、第1カム20の回転によるカムフォロア23の移動方向と同じである。左右移動テーブル12の左右移動で、これに支持された工具支持体13とナットランナー4が左右移動する。
【0023】
第2カム30と上下駆動機構31は、回転駆動軸14の回転力で工具支持体13とナットランナー4を上下移動させる。第2カム30は、例えば矩形の平板カムであって、裏面が工具支持体13に固定され、鉛直な表面に図6に示すような第2カム溝32を有する。第2カム溝32は、第2カム30の表面中央部に形成された円弧溝32Sとその両端から水平方向に延びる一対の水平溝32L、32Rを有する。上下駆動機構31は、回転駆動軸14の先端部に固定された回転アーム33と、回転アーム33の先端部に回転可能に設置されたカムフォロア34とを備える。回転アーム33は回転駆動軸14の半径方向に延び、その先端部のカムフォロア23は第2カム30のカム溝32に嵌挿される。
【0024】
回転駆動軸14と一体に回転する回転アーム33のカムフォロア23の中心の回転半径rと、第2カム溝32の円弧溝32Sの中心線曲率半径が互いに等しく設定される。回転駆動軸14の定角度(本実施形態では180°)の往復回転で回転アーム33が往復回転すると、カムフォロア23が第2カム溝32の水平溝32L又は32Rから円弧溝32Sに移動し、円弧溝32Sから水平溝32R又は32Lに移動する。カムフォロア23が水平溝32L又は32Rを移動する間に回転アーム33の回転力で工具支持体13が上下動し、カムフォロア23が円弧溝32Sを移動する間は工具支持体13が定位置に保持される。
【0025】
ここで、例えば軸回転駆動源15が回転駆動軸14を180゜の定角度範囲で往復回転させる場合、第1カム20の往路回転(軸回転駆動源15から見て左回転)時に第1レバー24のカムフォロア23が第1カム溝22に図5の定位置のPaからPb、Pc、Pdへと相対移動し、第1カム20の復路回転(軸回転駆動源15から見て右回転)時には逆の定位置PdからPc、Pb、Paへと相対移動する。一方の定位置のPbは、内側円周溝22Lと傾斜溝22Sの境界域にあり、他方の定位置Pcは、外側円周溝22Rと傾斜溝22Sの境界域にある。カムフォロア23が位置PaからPbに相対移動するときの第1カム20の回転角αと、カムフォロア23が位置PdからPcに相対移動するときの第1カム20の回転角αが同一であり、カムフォロア23が位置PbとPcの間を相対移動するときの第1カム20の回転角をβとすると、β+2α=180゜である。
【0026】
一方、第2カム30の第2カム溝32と回転アーム33のカムフォロア34の関係は、図5の関係に対応させて図6に示すように設定される。すなわち、回転駆動軸14の180゜の往復回転による回転アーム33の往路回転(軸回転駆動源15から見て左回転)時にカムフォロア34が第2カム溝32の図6の定位置QaからQb、Qc、Qdへと相対移動し、回転アーム33の復路回転(右回転)時には逆の定位置QdからQc、Qb、Qaへと相対移動する。一方の定位置Qbは、片側の水平溝32Lと円弧溝32Sとの境界域にあり、他方の定位置Qcは、他の水平溝32Rと円弧溝32Sとの境界域にある。カムフォロア34が定位置QaからQb、及び、QdからQcに相対移動するときの回転アーム33の回転角がαに設定され、カムフォロア34が定位置QbとQcの間を相対移動するときの回転アーム33の回転角がβに設定される。
【0027】
従って、回転駆動軸14を軸回転駆動源15で1往復回転させると、ナットランナー4が定軌道を上下左右に門形に移動して、定位置のベアリングキャップ2の内側列mのボルト3を締め付け、次に、外側列nのボルト3を締め付ける。このボルト締め付け動作を図7(A)〜(D)に基づき説明する。
【0028】
図7(A)は、ナットランナー4が下降してソケット部材5が内側列mのボルト3の頭部に嵌挿されたボルト締め付け直前の状態を示す。この状態でナットランナー4がボルト締め付け動作を開始して内側列mのボルト3がベアリングキャップ2に締め付けられると、回転駆動軸14が往路回転を開始する。
【0029】
回転駆動軸14の往路回転で第1カム20と回転アーム33が一体に往路回転を始めて図7(B)の状態に移行する。即ち、第1カム20の定角度αの往路回転でカムフォロア23が第1カム溝22の内側円周溝22の位置PaからPbへと相対移動するが、カムフォロア23の絶対位置が変わらず、左右移動テーブル12は停止したままである。一方、回転駆動軸14と一体に回転アーム33が定角度αまで往路回転すると、カムフォロア34が第2カム溝32の水平溝32Lを位置QaからQbへと相対移動し、この移動時に上昇回転するカムフォロア34が第2カム30を定ストロークsだけ押し上げ、第2カム30を介して工具支持体13とナットランナー4が定ストロークsだけ上昇させられる。つまり、回転駆動軸14が定角度αだけ往路回転すると、ナットランナー4は左右移動せずに所定ストロークsだけ上昇する。
【0030】
図7(B)の状態から回転駆動軸14が更に定角度βだけ往路回転すると、図7(C)の状態に移行する。この移行の場合、回転アーム33のカムフォロア34は第2カム溝32の円弧溝32Sを位置QbからQcへと移動するが、このときのカムフォロア34の中心の回転半径rと円弧溝32Sの中心線曲率半径が同一であるから、第2カム30は上昇も下降もせずに静止した状態に維持され、ナットランナー4は上下方向定位置で静止する。一方、第1カム20が定角度βだけ往路回転すると、第1カム溝22の定位置PbからPcへとカムフォロア23が相対移動し、この相対移動で軸受27が図4で右方向に押圧力を受けて、左右移動テーブル12が図7(C)のように右方向に定水平ストロークs’だけ移動する。この右水平移動で工具支持体13とナットランナー4も定ストロークs’だけ右移動して、ナットランナー4が外側列nのボルト3の真上の定位置に移動する。
【0031】
次に、図7(C)の状態から回転駆動軸14が更に定角度αだけ往路回転すると、図7(D)の状態に移行してナットランナー4が定ストロークsだけ下降して、ソケット部材5が外側列nのボルト3の頭部に嵌挿される。即ち、第1レバー24の定角度αの往路回転でカムフォロア23が第1カム溝22の外側円周溝22Rの位置PcからPdへ相対移動するが、カムフォロア23の絶対位置が変わらず、左右移動テーブル12は停止したままである。一方、回転アーム33が定角度αまで往路回転すると、カムフォロア34が第2カム溝32の水平溝32Rを位置QcからQdへと相対移動し、このときに下降回転するカムフォロア34が第2カム30を定ストロークsだけ押し下げて工具支持体13とナットランナー4を定ストロークsだけ下降させる。
【0032】
図7(D)の状態でナットランナー4が動作して外側列nのボルト3をベアリングキャップ2に締め付ける。このボルト締め付け完了後、回転駆動軸14が図7の場合と逆の復路回転して、上記と逆コースでのナットランナー4の上昇、左移動、下降の工具移動動作が行われる。
【0033】
以上のようにナットランナー4の所定軌道での上下左右の門形移動を、単一の軸回転駆動源15による回転駆動軸14の往復回転力を第1カム20で左右移動力に変換し、第2カム30で上下移動力に変換して行うようにすると、上下左右移動に要する駆動源が最小の1つで済む。また、ナットランナー4の上下左右動時の各移動完了点の確認をしなくても、カム機構で移動点の精度出しが高精度で得られ、上下左右移動がロスタイム無くして最小限のサイクルタイムで行えるようになる。
【0034】
尚、以上の第1の実施例においては、回転駆動軸14を180゜の範囲で往復回転させる場合について説明したが、この往復回転角度は仮に180゜以外であっても、その往復回転角度に応じて第1カム溝22と第2カム溝32の形状をそれぞれ設定すればよいから、回転駆動軸14の往復回転角度は特に180°に限定されない。また、ナットランナー4を定ストロークだけ上昇或いは下降させてから左右動させたが、第1カム溝22の第2カム溝32の形状を変更させてナットランナー4の上昇或いは下降の途中から左右動させるようにすることも可能である。この場合はナットランナー4の移動軌道が逆U字状に近い門形となる。このような門形軌道の形状変更は、ナットランナー4の移動経路に干渉物が存在しない限り自由に行える。ただし、ボルト3の直近ではソケット部材5との脱着を支障なく行うためナットランナー4の移動軌道を垂直にする必要がある。
【0035】
また、第1の実施例において、図1及び図2に示すように、左右移動テーブル12の上部にエアーシリンダ40を設置して、エアーシリンダ40に工具支持体13を常時持ち上げるエアー圧を常時供給しておくことが望ましい。つまり、工具支持体13に4台のナットランナー4を取付けると、その総重量がかなり大きくなってこれを上下動させる軸回転駆動源15に掛かる負荷が大きくなる。そこで、エアーシリンダ40に4台のナットランナー4と工具支持体13の総重量に釣り合うエアー圧を供給して、工具支持体13を常時持ち上げるようにしておくと、ナットランナー4の上下動が非常に小さな動力で簡単迅速に行えるようになり、軸回転駆動源15に掛かる負荷も軽微となる。
【0036】
また、図3に示すように、工具支持体13と支持フレーム11との間に上下ガイド用のガイドピン41とガイド穴42を形成してもよい。ガイドピン41は、工具支持体13の下端に下向きに形成され、ガイド穴42は、支持フレーム11上に左右一対で形成される。工具支持体13が下降してナットランナー4がボルト3に嵌挿される直前に、ガイドピン41をガイド穴42に挿通してナットランナー4の下降時の位置出しガイドを行う。
【0037】
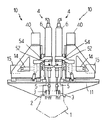
以上の第1の実施例は、ボルト締め付け用ナットランナーに適用したもので、ボルト緩め用ナットランナーに適用したのが、次の図8乃至図11に示す第2の実施例の工具移動装置10である。このボルト緩め用の工具移動装置10は、ナットランナー4のソケット部材5でベアリングキャップ2の内側列mのボルト3を緩め、緩めたボルト3をベアリングキャップ2に残したまま、ナットランナー4を上昇させて次の外側列nのボルト3の真上まで横移動させて下降させる一連の動作を行う。
【0038】
この工具移動装置10の場合、緩めたボルト3からソケット部材5を引き上げる際に、ソケット部材5にボルト3の頭部が詰まってボルト3が一緒に引き上げられる可能性があるので、ナットランナー4の上下動のストロークを第1の実施例より大きく設定する必要があり、この余分に必要とする上下動ストロークを図9に示す上下動シリンダ50で得るようにする。この追加された上下動シリンダ50は、工具移動装置10の全体を支持する支持フレーム11を上下動させて、全てのナットランナー4を一括して上下動させる。
【0039】
第2の実施例の特徴とするところは、ソケット部材5の上昇時にボルト3が一緒に引き上げられるのを回避する対策として、ナットランナー4をオフセット配置し、ソケット部材5に同軸にボルト突き落とし用ロッド51を貫通させ、このロッド51の上昇時の上限定位置にストッパー52を設置したことである。
【0040】
即ち、工具支持体13に対してナットランナー4のソケット部材5と回転駆動部6を両者の軸線を横にずらした状態すなわちオフセット状態で配置して、ソケット部材5の上方にスペースを設けておく。また、図10(B)や図11(B)に示すように、ソケット部材5に同軸にボルト突き落とし用ロッド51を上下動可能に貫通させる。ロッド51の上端の大径部51’をソケット部材5の上端に係止させることで、ロッド51をソケット部材5に自由状態で嵌挿させ、このときロッド51の下端部をソケット部材5の下端部のボルト嵌合穴53から下方に少し突出させておく。そして、ソケット部材5の真上の定位置に平板状のストッパー52を設置する。ストッパー52は、左右移動テーブル12に基端部が固定された支持板54の先端部下面に固定される。ストッパー52とロッド51の相互関係を図10及び図11に基づき説明する。
【0041】
図10はボルト緩めが正常に行われた場合のもので、図10(A)に示すように、ナットランナー4が下降して内側列mのボルト3を緩めると、ナットランナー4が第1の実施例と同様にカム機構にて定ストローク上昇する。この上昇時にソケット部材5からボルト3が正常に抜けると、図10(B)に示すようにナットランナー4だけが上昇し、ボルト3は緩められた状態でベアリングキャップ2に残る。
【0042】
図10(A)の状態からナットランナー4が上昇する際にソケット部材5にボルト3の頭部が詰まる等して抜けない場合、図11(A)に示すようにボルト3がソケット部材5と共に引き上げられる。このときのロッド51の下端は、ソケット部材5のボルト嵌合穴53に在るボルト3の頭部に押し上げられて、ロッド51の上端の大径部51’がソケット部材5の上端から浮き上がった状態に保持される。図11(A)の状態からナットランナー4が、図7(B)と同様なカム機構による上限位置まで上昇しようとすると、上限位置に上昇する直前にロッド51の大径部51’がストッパー52に当たり、ロッド51がストッパー52で少し押し下げられる。この押し下げでロッド51がボルト3をソケット部材5のボルト嵌合穴53から突き落とす。突き落とされたボルト3はベアリングキャップ2に戻り、ロッド51も自重で少し落下して大径部51’がソケット部材5の上端に係止する定位置で安定する。
【0043】
以上のようにオフセット配置されたナットランナー4のソケット部材5の真上に設置されるストッパー52は、平板状の簡単な構造のもので確実にロッド51とボルト3を突き落とす。このようなストッパー52の設置は、ナットランナー4をオフセット配置すことで可能となる。仮に、図1の第1の実施例のようにナットランナーがソケット部材と回転駆動部が同軸配置されたもので、ソケット部材にボルト突き落とし用ロッドを貫通させた場合、このロッドをナットランナー上昇時に突き落とすようにするためには、ロッドの一部をソケット部材外周に突出させて、その突出部分を外部からレバー等で押し下げるような複雑な構造にする必要がある。
【0045】
【発明の効果】
請求項1および2記載の工具移動装置によれば、工具が1つの軸回転駆動源の動力だけで上下左右に移動するので、駆動源が最小数で構成でき、設備費の低減化が図れる。また、軸回転駆動源で回転駆動軸を往復回転させ、この回転力を上下動用のカム式駆動機構と左右動用のカム式駆動機構で工具の上下左右移動力に変換させたので、工具の上下左右の移動点での確認動作をしなくても正確な上下左右移動が達成できて、サイクルタイムの短縮化が可能となる。
【0046】
また、ナットランナーで隣接する一対のボルトを順に締め付けたり、緩めたりするナットランナー移動装置の駆動源の低減による小型軽量化、ナットランナーの上下左右移動の高速化が可能となる。
【0047】
また、ボルト緩め動作時にナットランナーのソケット部材に詰まったボルトの突き落としが、ソケット部材の真上に設置した簡単な構造のストッパーで確実に実行できるので、ボルト突き落とし機構の簡略化が容易となり、ボルト突き落とし動作の信頼性が向上する。
【図面の簡単な説明】
【図1】この発明の第1の実施例の工具移動装置の正面図。
【図2】図1装置の側面図。
【図3】図1装置における要部の拡大正面図。
【図4】図3の要部の分解斜視図。
【図5】図3の要部に示す第1カムのカム溝の展開図。
【図6】図3の要部に示す第2カムの正面図。
【図7】(A)〜(D)は、図1装置における工具(ナットランナー)の上下左右移動時と第1カム及び第2カムの関係を示す一連の各動作状態時での正面図。
【図8】この発明の第2の実施例の工具移動装置の正面図。
【図9】図8装置の側面図。
【図10】(A)及び(B)は、図8装置におけるナットランナーの正常なボルト緩め動作時での各動作状態の正面図。
【図11】(A)及び(B)は、図8装置におけるナットランナーの正常でないボルト緩め動作時での各動作状態の正面図。
【図12】従来の工具移動装置を説明するためのナットランナー移動装置の概略を示す正面図。
【図13】図12におけるボルトの配列状態を示す平面図。
【符号の説明】
3 ボルト
4 ナットランナー
5 ソケット部材(工具)
6 回転駆動部(工具駆動部)
10 工具移動装置
11 支持フレーム
12 左右移動テーブル
13 工具支持体
14 回転駆動軸
15 軸回転駆動源
20 第1カム
21 左右駆動機構
30 第2カム
31 上下駆動機構
51 ワーク突き落とし用ロッド
52 ストッパー
Claims (2)
- 工具を所定位置から所定ストロークで上下左右の門形軌道を往復移動させる工具移動装置において、
装置全体を支持する支持フレームと、前記支持フレームに工具左右方向に往復移動可能に設置された左右移動テーブルと、工具を支持して前記左右移動テーブルに工具上下移動方向に往復移動可能に支持された工具支持体と、前記左右移動テーブルに設置された回転駆動軸及びこの回転駆動軸を定角度往復回転させる軸回転駆動源と、前記回転駆動軸に固定された第1カムと前記支持フレームの間に設置され、前記回転駆動軸による前記第1カムの回転力を前記左右移動テーブルの左右移動力に変換するカムフォロアを備えた左右駆動機構と、前記工具支持体に固定された第2カムと前記回転駆動軸の間に設置され、前記回転駆動軸と一体に回転して前記第2カムを介して前記工具支持体を上下往復移動させるカムフォロアを備えた上下駆動機構を具備し、
前記工具支持体に支持される工具がナットランナーであり、
上記ナットランナーがソケット部材とこのソケット部材を回転駆動させる回転駆動部を上下に配置した構成で、このナットランナーの前記ソケット部材の回転中心と、前記回転駆動部の回転軸中心線が平行に離隔するように、前記ソケット部材と回転駆動部をオフセット配置すると共に、前記ソケット部材に同軸にして上下相対移動可能にワーク突き落とし用ロッドを貫通させ、前記ソケット部材が前記上下駆動機構で上昇したときに前記ロッドの上端を押し下げてロッドの下端でソケット部材の下端部に詰まったボルト等のワークを突き落とすストッパーを前記左右移動テーブル側に固定配置したことを特徴とする工具移動装置。 - 前記工具支持体が複数の工具と、この複数の工具を各別に作動させる複数の工具駆動部を支持したことを特徴とする請求項1記載の工具移動装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP14455096A JP3676881B2 (ja) | 1996-06-06 | 1996-06-06 | 工具移動装置 |
| KR1019970023464A KR980000759A (ko) | 1996-06-06 | 1997-06-05 | 공구 이동장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP14455096A JP3676881B2 (ja) | 1996-06-06 | 1996-06-06 | 工具移動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09323235A JPH09323235A (ja) | 1997-12-16 |
| JP3676881B2 true JP3676881B2 (ja) | 2005-07-27 |
Family
ID=15364904
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP14455096A Expired - Fee Related JP3676881B2 (ja) | 1996-06-06 | 1996-06-06 | 工具移動装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP3676881B2 (ja) |
| KR (1) | KR980000759A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4975973B2 (ja) * | 2005-03-17 | 2012-07-11 | 古河電気工業株式会社 | 可動ステージ装置 |
| CN104551816B (zh) * | 2014-12-18 | 2017-02-08 | 天水星火机床有限责任公司 | 双动力并联自动循环系统 |
| CN112059595B (zh) * | 2020-09-21 | 2024-09-03 | 绍兴泰禾自动化设备有限公司 | 一种自动化内拉杆装配机 |
-
1996
- 1996-06-06 JP JP14455096A patent/JP3676881B2/ja not_active Expired - Fee Related
-
1997
- 1997-06-05 KR KR1019970023464A patent/KR980000759A/ko not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| KR980000759A (ko) | 1998-03-30 |
| JPH09323235A (ja) | 1997-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3676881B2 (ja) | 工具移動装置 | |
| KR950007235B1 (ko) | 공작기계의 팰릿교환장치 | |
| CN109967771B (zh) | 一种转盘式孔钻装置 | |
| KR100266383B1 (ko) | 반도체팩키지리드성형용프레스장치 | |
| US11897130B2 (en) | Planar drive device, and method for operating a planar drive device | |
| CN220560452U (zh) | 一种一体式方孔重型激光卡盘 | |
| JP3857134B2 (ja) | プレス機械 | |
| CN110116226B (zh) | 柱件的侧孔全自动加工设备 | |
| CN118720220A (zh) | 一种减速机连接盖的高效钻孔夹具 | |
| JP3326003B2 (ja) | 物品取出装置 | |
| CN212311268U (zh) | 应用于催化剂包体的对中定位机构 | |
| JP2001269974A (ja) | 射出成形機の射出装置 | |
| US6626076B2 (en) | Punch press | |
| JPH087987Y2 (ja) | ワーク位置決めポジショナー | |
| JPH075954Y2 (ja) | 捩じりバネ自動組付装置 | |
| KR100654681B1 (ko) | 시트 펌핑기구 시험장치 | |
| CN217801693U (zh) | 一种新型双旋转机械手 | |
| KR20050106811A (ko) | 링크형의 피치가변 너트러너 | |
| KR100477996B1 (ko) | 단추 자동공급기용 고무회동체의 작동구조 | |
| KR100507475B1 (ko) | 로터리 캠 프레스 장치 | |
| KR950005623Y1 (ko) | 복식 단조기의 고정 기구에 대한 전동 장치 | |
| JP2006159283A (ja) | 圧造機におけるトランスファチャック | |
| JPH05337653A (ja) | 作業機械の移動装置 | |
| JPS6037210Y2 (ja) | タ−レットヘッドの回動機構 | |
| SU1329874A1 (ru) | Поворотно-фиксирующее устройство |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040622 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040820 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20050201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050302 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20050308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050502 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313532 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080513 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090513 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090513 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100513 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110513 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110513 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130513 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130513 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140513 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |