JP3740470B2 - 減速機付のdcブラシレスモータ - Google Patents
減速機付のdcブラシレスモータ Download PDFInfo
- Publication number
- JP3740470B2 JP3740470B2 JP2003032395A JP2003032395A JP3740470B2 JP 3740470 B2 JP3740470 B2 JP 3740470B2 JP 2003032395 A JP2003032395 A JP 2003032395A JP 2003032395 A JP2003032395 A JP 2003032395A JP 3740470 B2 JP3740470 B2 JP 3740470B2
- Authority
- JP
- Japan
- Prior art keywords
- driver
- motor
- brake mechanism
- mechanical brake
- reduction gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000009467 reduction Effects 0.000 title claims description 18
- 230000007246 mechanism Effects 0.000 claims description 38
- 239000003638 chemical reducing agent Substances 0.000 claims description 24
- 238000012423 maintenance Methods 0.000 description 5
- 230000004323 axial length Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/102—Structural association with clutches, brakes, gears, pulleys or mechanical starters with friction brakes
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Brushless Motors (AREA)
Description
【発明の属する技術分野】
本発明は、減速機付のDCブラシレスモータに関する。
【0002】
【従来の技術】
DCブラシレスモータは、インダクションモータと比較して起動トルクが大きく、高頻度の起動・停止に耐えられるという利点を有している。又、インダクションモータを所謂インバータによって制御・駆動する構造に比べ、一般により高い精度を得ることができる。そのため、近年さまざまな分野において多用されている。
【0003】
DCブラシレスモータは、一般に、ドライバと称されるコントローラによって制御・駆動される。このドライバは、純粋な電気部品であり、又、工場内の多くのモータ本体を1箇所において集中的に駆動・制御するという目的から、従来モータ本体とは離れた位置に設けられ、ケーブルによってそれぞれのモータ本体と連結する構成が採用されていた。
【0004】
しかしながら、近年、少量多品種の生産要請等から、工場内の機械を独立して駆動・制御できるレイアウトが求められ、そのため、それぞれの機械をそれぞれの場所において独立して駆動・制御できる方がより便利な状況となってきた。
【0005】
このような観点で、近年では、例えば非特許文献1(図2参照)に記載されているように、モータ本体2とそのドライバ4とを一体化し、単体でモータ本体2を駆動・制御できるようにしたドライバ一体型のDCブラシレスモータ6も提案されている。
【0006】
【非特許文献1】
松下電器産業株式会社、モータ社、回路一体型ブラシレスモータのカタログ(2002年9月)
【0007】
【発明が解決しようとする課題】
例えば、シャッタや電動カーテンの駆動用のDCブラシレスモータ、あるいは昇降装置の駆動用のDCブラシレスモータ等においては、被駆動対象を任意の位置で停止したままの状態で維持しなければならない。このような用途においては、停止時において、即ち電源がOFFとされているときにおいて、被駆動対象を停止状態に維持させておくためのメカニカルなブレーキ機構が必須となる。
【0008】
又、このような用途にDCブラシレスモータを用いる場合、そのままでは回転速度が高すぎるため、減速機を付設する必要が出てくることも多い。
【0009】
ドライバ一体型のDCブラシレスモータにメカニカルなブレーキ機構を付設する場合、例えばモータ本体の出力軸側に該メカニカルブレーキ機構を付設すると、該メカニカルブレーキ機構は、結果としてモータ本体と減速機との間に挟まれることになり、該メカニカルブレーキ機構のメンテナンスが困難となる等の問題が発生する。又、メカニカルブレーキ機構をドライバの反モータ本体側に付設しようとした場合には、モータ本体のモータ軸がドライバの中央を貫通する構成を形成する必要があり、ドライバの設計が困難となるという問題等が発生する。
【0010】
本発明は、このような従来の事情に鑑みてなされたものであって、特に、ドライバ一体型のDCブラシレスモータにおいて、該ドライバ、モータ本体、メカニカルブレーキ機構、そして減速機を、技術的に最も合理的に配置するための構造を提供することをその課題としている。
【0011】
【課題を解決するための手段】
本発明は、ドライバによって制御されるDCブラシレスモータのモータ本体に減速機を一体的に連結した減速機付のDCブラシレスモータにおいて、モータ軸の回転に制動を付与可能なメカニカルブレーキ機構を備え、前記ドライバ、前記メカニカルブレーキ機構、前記モータ本体、及び前記減速機の入力軸を、この順で同一軸線上に組み付けたことにより、上記課題を解決したものである。
【0012】
本発明においては、ドライバ、メカニカルブレーキ機構、モータ本体、及び減速機(の入力軸)をこの順で同一軸線上に組み込むようにしたため、ドライバにモータ本体のモータ軸を貫通させる必要がない。又、ドライバがモータ本体と一体化されているため、外部に別途のドライバ(コントローラ)を設ける必要がなく、その間のケーブルの付設も不要である。
【0013】
又、メカニカルブレーキ機構は、ドライバとモータ本体との間に挟まれるようになるため、モータ本体のモータ軸の延長は最小限で済み、且つ、ドライバを外すのは(オイル等が存在する)減速機を外すのに比べ簡単である。即ち、例えばドライバがモータ本体と減速機との間に挟まれて、そのメンテナンスが困難となるという不具合の発生も未然に防止できる。
【0014】
なお、前記ドライバは、前記メカニカルブレーキ機構側にドライバカバーを備え、且つ、このドライバカバーが該ブレーキ機構のカバーを兼ねるようにすると、メカニカルブレーキ機構のメンテナンスを行なう際に、ドライバをカバー付で(略完全に独立した状態で)確実に外すことができる。又、該ドライバを外すことによってそのままメカニカルブレーキ機構を露出させることができ、直ちにメカニカルブレーキ機構のメンテナンスに入ることができる。
【0015】
【発明の実施の形態】
以下図面に基づいて本発明の実施形態の例を詳細に説明する。
【0016】
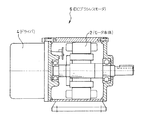
図1に、本発明の実施形態が適用された減速機付DCブラシレスモータの例を示す。
【0017】
この減速機付DCブラシレスモータ10は、ドライバ12、メカニカルブレーキ機構14、モータ本体16をこの順で同一軸線L上に備え、更に連続して減速機18を同じ軸線L上に備える。
【0018】
前記ドライバ12は、単層あるいは3層の交流(AC)を直流(DC)に変換すると共に、モータ本体16を制御・駆動するための電力を発生する。このドライバ12は、回生ブレーキ回路(図示略)を内蔵し、制動時に発生する制動エネルギを回収できるように設計されている。なお、このドライバ12の機能によるモータ本体16の制動は、あくまで回転中の回転速度を減少させるもので、停止中の制動を維持する機能はない。該ドライバ12自体の構成については、特に従来と異なるところはないため、詳細な図示及び具体的な説明は省略する。
【0019】
前記メカニカルブレーキ機構14は、電源OFF時においても機械的にモータ本体16の回転に制動を付与することが可能なものである。このメカニカルブレーキ機構14の中央部には、モータ本体16のモータ軸20が延在・挿入されており、回転ディスク(第1摩擦板)22が該モータ軸20と一体的に回転できるようになっている。又、モータカバー24がボルト26を介してケーシング本体28に固定されている。このモータカバー24上に前記回転ディスク22と対峙して固定ディスク(第2摩擦板)30がボルト32を介して固定されている。
【0020】
メカニカルブレーキ機構14は、電源OFF時を含め、停止時には図示せぬスプリングによって回転ディスク22及び固定ディスク30が押圧された状態(制動状態)を維持し、運転時にこの押圧力に打ち勝つだけの電磁力を発生させて解放状態を形成する構成とされている。このときの解放電流の増減により、発生する電磁力を制御することができ、付与する制動力を調整することもできるようになっている。
【0021】
前記モータ本体16は、ブラシレスであり、直流(DC)によって駆動可能である。このモータ本体16の回転に関する制御は、全てドライバ12側より受ける構成とされている。
【0022】
前記減速機18は、この例では揺動内接噛合型の遊星歯車構造を有するものが採用されている。即ち、モータ本体16のモータ軸20は、減速機18の内部にまで延在され、そのまま減速機18の入力軸(40)として機能している。この入力軸(40)の外周には偏心体42を介して外歯歯車44が揺動回転自在に組み込まれており、固定状態にある内歯歯車46に内接噛合している。外歯歯車44と内歯歯車46は、1〜3程度の僅少の歯数差を有する。この減速機18では、外歯歯車44の自転成分が内ピン48を介してキャリア50に伝達され、該キャリア50と一体化されている出力軸52から動力が取り出される構成とされている。
【0023】
なお、モータ本体16の負荷側カバー60は、減速機18の入力側カバーを兼用しており、ケーシング本体28と一体的に形成されている。減速機18の負荷側カバー64は、内歯歯車46と一体化された減速機ケーシング66ごとケーシング本体28にボルト68を介して固定されている。
【0024】
図1から明らかなように、ドライバ12は、メカニカルブレーキ機構14側にドライバカバー70を備え、このドライバカバー70がメカニカルブレーキ機構14のカバーを兼ねる構成とされている。ドライバカバー70はボルト72を介してケーシング本体28のフランジ部74に固定・連結されている。ドライバ12側と、メカニカルブレーキ機構14及びモータ本体16側との電気的な連結はケーブル80、82を介して行なわれている。ケーブル80、82の連結は、分離時の利便性を考慮して、着脱自在のソケット84を介して行なわれている。なお、ケーブルの長さに余裕を持たせた場合には、ソケットは特に必要ない。
【0025】
次にこの実施形態の作用を説明する。
【0026】
モータ本体16は、基本的にドライバ12によって制御されたDC駆動電流によって(回生制動を含め)そのモータ軸20の回転状態が制御される。モータ軸20が回転している間は、基本的にメカニカルブレーキ機構14は解放状態に維持される。モータ軸20の回転は、減速機18の入力軸(40)の回転として減速機18側に直接伝達され、周知の作用により所定の減速比に減速された上で出力軸52から出力される。
【0027】
ここで、モータ軸20が停止中にその停止状態を維持するためには、メカニカルブレーキ機構14の解放電流をOFFとし、スプリングの付勢力によって回転ディスク22及び固定ディスク30とを摩擦接合させる。これにより、特に電力を消費することなく、この制動状態を維持することが可能となる。従って、例えば、シャッタ、電動カーテン、各種昇降装置等、そのままでは重力によって落下してしまうような機器等を被駆動対象とする場合に、該被駆動対象を任意の位置において固定することが可能となる。
【0028】
この実施形態では、モータ本体16にドライバ12が一体的に連結されているため、別途のドライバ(コントローラ)を必要とせず、これらを電気的に接続するケーブル等も必要としない。又、メカニカルブレーキ機構14がモータ本体16とドライバ12との間に配置されているため、モータ軸20の延長が最小限で済み、ドライバ12の中心をモータ軸20が通ったりしないことから、ドライバ12の設計も容易である。
【0029】
又、ボルト72を外すことにより、ドライバ12をドライバカバー70ごと外すことができる。この取外しは、例えば(オイルの存在する)減速機18を取外すのに比べ、極めて簡単である。又、ケーブル80、82がソケット84を介して着脱自在に連結されているため、ドライバ12のケーブル80、82の分離・再結合も容易である。
【0030】
又、ドライバカバー70はメカニカルブレーキ機構14のカバーを兼ねているため、ドライバ12を取り外すと、そのままメカニカルブレーキ機構14が露出するため、該メカニカルブレーキ機構14のメンテナンスも容易である。
【0031】
一方、メカニカルブレーキ機構14がモータ本体16と減速機18との間に存在しないため、モータ軸20がそのまま減速機18の入力軸(40)となる構成を剛性を高く維持したまま容易に実現することができる。
【0032】
以上の構成により、減速機付DCブラシレスモータ10の軸方向長が増大するのを防止しながら、4つの構成要素、即ち、ドライバ12、メカニカルブレーキ機構14、モータ本体16、減速機18を高剛性の状態で合理的に連結することができる。
【0033】
なお、上記実施形態においては、減速機18として、揺動内接噛合型の遊星歯車構造の減速機が適用されていたが、本発明は、減速機の具体的な構成については特に限定されない。
【0034】
又、メカニカルブレーキ機構14の構成についても、特に上記構成に限定されない。
【0035】
【発明の効果】
本発明によれば、特に、ドライバ、メカニカルブレーキ機構を備えた減速機付のDCブラシレスモータに関し、不具合の発生や軸方向長の増大等の問題の発生を極力防止しながら、各要素を合理的に連結・一体化することができるようになるという優れた効果が得られる。
【図面の簡単な説明】
【図1】本発明が適用された減速機付DCブラシレスモータの構成例を示す縦断面図
【図2】従来のドライバ一体型のDCブラシレスモータの構成例を示す縦断面図
【符号の説明】
10…減速機付DCブラシレスモータ
12…ドライバ
14…メカニカルブレーキ機構
16…モータ本体
18…減速機
20…モータ軸
22…回転ディスク
24…モータカバー
28…ケーシング本体
30…固定ディスク
40…入力軸(モータ軸)
42…偏心体
44…外歯歯車
46…内歯歯車
48…内ピン
50…キャリア
52…出力軸
60…モータ本体の負荷側カバー
64…減速機の負荷側カバー
66…減速機ケーシング
70…ドライバカバー
80、82…ケーブル
84…ソケット
L…軸線
Claims (2)
- ドライバによって制御されるDCブラシレスモータのモータ本体に、減速機を一体的に連結した減速機付のDCブラシレスモータにおいて、
前記モータ本体のモータ軸の回転に制動を付与可能なメカニカルブレーキ機構を備え、
前記ドライバ、前記メカニカルブレーキ機構、前記モータ本体、及び前記減速機の入力軸を、この順で同一軸線上に組み付けた
ことを特徴とする減速機付のDCブラシレスモータ。 - 請求項1において、
前記ドライバは、前記メカニカルブレーキ機構側にドライバカバーを備え、且つ、このドライバカバーが該メカニカルブレーキ機構のカバーを兼ねることを特徴とする減速機付のDCブラシレスモータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003032395A JP3740470B2 (ja) | 2003-02-10 | 2003-02-10 | 減速機付のdcブラシレスモータ |
| KR10-2003-0088451A KR100514427B1 (ko) | 2003-02-10 | 2003-12-08 | 감속기가 있는 디씨 브러시리스 모터 |
| TW092134719A TWI231083B (en) | 2003-02-10 | 2003-12-09 | DC brushless motor with a decelerating machine |
| CNB2004100040965A CN100373748C (zh) | 2003-02-10 | 2004-02-09 | 带有减速器的直流无刷电机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003032395A JP3740470B2 (ja) | 2003-02-10 | 2003-02-10 | 減速機付のdcブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004248339A JP2004248339A (ja) | 2004-09-02 |
| JP3740470B2 true JP3740470B2 (ja) | 2006-02-01 |
Family
ID=33018755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003032395A Expired - Fee Related JP3740470B2 (ja) | 2003-02-10 | 2003-02-10 | 減速機付のdcブラシレスモータ |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP3740470B2 (ja) |
| KR (1) | KR100514427B1 (ja) |
| CN (1) | CN100373748C (ja) |
| TW (1) | TWI231083B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7514894B2 (en) * | 2005-08-09 | 2009-04-07 | Nxp B.V. | Driver for a brushless motor and data reading/writing device comprising a brushless motor controlled by such a driver |
| KR100685716B1 (ko) * | 2005-12-29 | 2007-02-26 | 삼성전기주식회사 | 브러시리스 직류모터의 분당 회전수 제어 장치 및 제어방법 |
| JP2007247635A (ja) * | 2006-03-20 | 2007-09-27 | Nabtesco Corp | 風車の駆動装置 |
| CN103956851A (zh) * | 2014-05-06 | 2014-07-30 | 刘磊 | 一种高扭电机 |
| TWI655380B (zh) * | 2017-12-29 | 2019-04-01 | 州巧科技股份有限公司 | 平板型減速機 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2265433Y (zh) * | 1995-07-17 | 1997-10-22 | 厦门电机实业总公司 | 一体式卷门驱动装置 |
| JP2001161091A (ja) * | 1999-11-30 | 2001-06-12 | Ito Denki Kk | モータローラの制御方法 |
-
2003
- 2003-02-10 JP JP2003032395A patent/JP3740470B2/ja not_active Expired - Fee Related
- 2003-12-08 KR KR10-2003-0088451A patent/KR100514427B1/ko not_active Expired - Fee Related
- 2003-12-09 TW TW092134719A patent/TWI231083B/zh not_active IP Right Cessation
-
2004
- 2004-02-09 CN CNB2004100040965A patent/CN100373748C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN1521918A (zh) | 2004-08-18 |
| TWI231083B (en) | 2005-04-11 |
| JP2004248339A (ja) | 2004-09-02 |
| CN100373748C (zh) | 2008-03-05 |
| TW200421693A (en) | 2004-10-16 |
| KR20040073266A (ko) | 2004-08-19 |
| KR100514427B1 (ko) | 2005-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017516697A (ja) | 車両の電気ブレーキアクチュエータ | |
| JP2000515616A (ja) | 電気機械式に操作可能なブレーキ | |
| JP2010230128A (ja) | インホイールモーター用ブレーキ装置 | |
| KR20130071256A (ko) | 전자식 주차 브레이크의 모터 | |
| EP1607360B1 (en) | Elevator hoisting machine | |
| WO1987000987A1 (fr) | Engrenage reducteur pourvu d'une source de puissance d'entrainement | |
| US7828132B2 (en) | Dual function holding device operable under a system power loss condition | |
| JPH11299201A (ja) | エレベ―タやリフト駆動機構等のための電気機械 | |
| JP3740470B2 (ja) | 減速機付のdcブラシレスモータ | |
| CN109990018B (zh) | 盘式制动器以及具有其的车辆 | |
| JPH1179627A (ja) | ホームエレベータ昇降用駆動装置 | |
| KR20170064429A (ko) | 파킹 브레이크 액츄에이터 | |
| EP1248011B1 (en) | Disc brake to be opened by torque | |
| JP2005009373A (ja) | 風車ブレードのピッチ角制御装置 | |
| WO2019153446A1 (zh) | 大扭矩外转子电机 | |
| JP6893955B2 (ja) | ブレーキ付きモータ | |
| CN104600903A (zh) | 带手动释放装置的旁磁制动电机 | |
| WO2025011189A1 (zh) | 一体式传动轴的电子机械制动装置和车辆 | |
| JPS61276797A (ja) | クランクプレスの駆動部構造 | |
| JP2004291191A (ja) | チャック用電動操作装置 | |
| CN105059124A (zh) | 缓冲制动器用制动组件 | |
| CN116802140A (zh) | 升降装置 | |
| JP3600965B2 (ja) | 電気ホイスト | |
| JP3423173B2 (ja) | 手動操作機構を備えた駆動装置 | |
| JP6117689B2 (ja) | チェーンブロック |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3740470 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081111 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111111 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111111 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121111 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121111 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131111 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |