JP3771992B2 - 内視鏡装置 - Google Patents
内視鏡装置 Download PDFInfo
- Publication number
- JP3771992B2 JP3771992B2 JP12091197A JP12091197A JP3771992B2 JP 3771992 B2 JP3771992 B2 JP 3771992B2 JP 12091197 A JP12091197 A JP 12091197A JP 12091197 A JP12091197 A JP 12091197A JP 3771992 B2 JP3771992 B2 JP 3771992B2
- Authority
- JP
- Japan
- Prior art keywords
- forceps
- color
- endoscope
- display
- virtual point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000000007 visual effect Effects 0.000 claims description 44
- 239000003550 marker Substances 0.000 description 98
- 238000000605 extraction Methods 0.000 description 30
- 238000003780 insertion Methods 0.000 description 28
- 230000037431 insertion Effects 0.000 description 28
- 238000001514 detection method Methods 0.000 description 21
- 230000004048 modification Effects 0.000 description 16
- 238000012986 modification Methods 0.000 description 16
- 230000005484 gravity Effects 0.000 description 14
- 230000003287 optical effect Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 11
- 230000000694 effects Effects 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 238000003384 imaging method Methods 0.000 description 5
- 210000003815 abdominal wall Anatomy 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 238000002674 endoscopic surgery Methods 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000004659 sterilization and disinfection Methods 0.000 description 2
- 229930182556 Polyacetal Natural products 0.000 description 1
- 239000004699 Ultra-high molecular weight polyethylene Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 229920006324 polyoxymethylene Polymers 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 description 1
Images













Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
【発明の属する技術分野】
本発明は、例えば体腔内に挿入される処置具と組合わされて使用され、内視鏡による観察視野内の画像を表示手段に表示させる内視鏡装置に関する。
【0002】
【従来の技術】
一般に、処置具と内視鏡とがそれぞれ別個に患者の体腔内に挿入され、体腔内に挿入された処置具の先端部分の画像を内視鏡の観察視野内に捕らえ、処置具による患部の処置状態を内視鏡によって観察しながらその処置作業を行う内視鏡下の手術が知られている。
【0003】
この種の内視鏡下手術で使用される内視鏡装置として特開平6−30896号公報が開示されている。ここに示された内視鏡装置では処置具である鉗子の先端部にマーカー(標識)を設け、このマーカーの位置を検出することにより、鉗子の先端部の位置を決める構成になっている。
【0004】
さらに、この装置には内視鏡全体を動かすアクチュエータであるマニピュレータが示されている。そして、このマニピュレータによって内視鏡の先端の位置および方向を任意の方向に移動することにより、内視鏡の視野を移動することができるようになっている。
【0005】
【発明が解決しようとする課題】
上記従来構成の装置のように鉗子の先端部に色マーカーを付けた場合には、色マーカーの表示面積が小さくなるので、表示手段の画面内における色マーカーの色抽出能が低くなる問題がある。
【0006】
また、鉗子の挿入部に色マーカーを付けた場合には、色マーカーを鉗子の挿入部の周方向に大きく付けられる。しかしながら、この場合には鉗子の先端部と色マーカーの位置とが離れてしまうので、色マーカーを表示手段の画面中央に導くようにマニピュレータによって内視鏡の先端の位置および方向を動かした際に鉗子の先端部が画面中央位置からずれてしまう問題がある。
【0007】
本発明は上記事情に着目してなされたもので、その目的は、色マーカー等の観察視野内の目標物を処置具の先端部に付けない場合でも、処置具の先端部を表示手段の画面の中央部に移動させるように制御することができ、作業性の優れた内視鏡装置を提供することにある。
【0008】
【課題を解決するための手段】
本発明は内視鏡と、この内視鏡による観察視野内の画像を表示する表示手段と、前記表示手段の表示画面内に複数の仮想点を設定する仮想点設定手段と、前記表示手段の表示画面上の任意の位置の前記仮想点を選択する仮想点選択手段と、前記表示手段に表示される前記観察視野内の目標物を識別する目標物識別手段と、この目標物識別手段からの出力データに基いて前記目標物の位置を検出する位置検出手段と、前記内視鏡の視野を移動させる内視鏡視野移動手段と、前記仮想点選択手段で選択された仮想点と前記目標物の位置とが一致するように前記内視鏡視野移動手段を動かす制御手段と、前記内視鏡視野移動手段を、動作状態と、停止状態とに切換える切換え手段とを具備したことを特徴とする内視鏡装置である。
そして、本発明では表示手段の表示画面内に予め中心点、及び、中心以外の点を含む複数の仮想点を仮想点設定手段によって設定し、仮想点選択手段によって表示手段の表示画面上の任意の位置の仮想点を選択する。ここで、切換え手段によって内視鏡視野移動手段を動作状態に切換えた場合には表示手段に表示される観察視野内の目標物が目標物識別手段によって識別され、この目標物識別手段からの出力データに基いて位置検出手段によって目標物の位置を検出する。その後、仮想点選択手段で選択された仮想点と目標物の位置とが一致するように制御手段によって内視鏡視野移動手段を動かすようにしたものである。
【0009】
【発明の実施の形態】
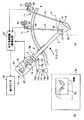
以下、本発明の第1の実施の形態を図1(A)乃至図6(D)を参照して説明する。図1(A)は本実施の形態の内視鏡装置全体の概略構成を示すものである。この内視鏡装置には患者の体腔内を観察する例えば腹腔鏡等の直視型の硬性のスコープ(内視鏡)1が設けられている。
【0010】
このスコープ1には患者の体腔内に挿入される挿入部2と、この挿入部2の基端部に配設された接眼部3とが設けられている。また、このスコープ1には図2(A)に示すように挿入部2の先端面に対物レンズ4、接眼部3に接眼レンズ5がそれぞれ配設されている。さらに、挿入部2を形成する円筒状の筒体6内には対物レンズ4と接眼レンズ5との間に複数のリレーレンズ7がそれぞれ適宜の間隔を存して並設されている。なお、スコープ1の光学系には図示しない歪み除去レンズが設けられている。
【0011】
また、スコープ1の挿入部2は予め例えば患者の腹壁部8等に穿刺されたトラカール9内に挿通され、体腔内に挿入されている。ここで、スコープ1の挿入部2の接眼部3側は多関節構造、本実施の形態では3関節構造のスコープ保持具10によって移動可能に保持されている。なお、このスコープ保持具10には定位置に固定される基台部10aと、この基台部10aに基端部が第1の関節部10bを介して回動可能に連結された第1のアーム10cと、この第1のアーム10cの先端部に基端部が第2の関節部10dを介して回動可能に連結された第2のアーム10eと、この第2のアーム10eの先端部に基端部が第3の関節部10fを介して回動可能に連結されたスコープホルダ10gとが設けられている。
【0012】
また、患者の腹壁部8等には処置具である2つの鉗子11,11´がスコープ1の挿入場所とは別の挿入場所から体腔内にそれぞれ独立に挿入されている。ここで、一方の第1の鉗子11には体腔内に挿入される挿入部12の先端部に処置部13が配設されている。さらに、挿入部12の基端部には手元側のハンドル部14が配設されている。そして、このハンドル部14の開閉操作にともない処置部13が遠隔的に開閉操作されるようになっている。
【0013】
また、他方の第2の鉗子11´は第1の鉗子11と略同一構成になっている。すなわち、第2の鉗子11´にも挿入部12´の先端部に処置部13´が配設されている。さらに、挿入部12´の基端部には手元側のハンドル部14´が配設されている。そして、このハンドル部14´の開閉操作にともない処置部13´が遠隔的に開閉操作されるようになっている。なお、処置具としては上記構成の鉗子11,11´の代わりに剥離鉗子、ハサミ、レーザープローブ、縫合器、電気メス、持針器、超音波吸引器等の他の構成の処置具を使用してもよい。
【0014】
また、スコープ1の接眼部3にはこのスコープ1の観察像の一部又は全部を撮像するTVカメラ15が取付けられている。このTVカメラ15には図2(A)に示すようにケーシング16内に第1の部品収納室17と第2の部品収納室18とが設けられている。ここで、第1の部品収納室17内にはレンズ、プリズム、ミラー、ズームレンズ等からなる光学素子19や、固体撮像素子であるCCD20等の撮像光学系の各光学部品が設けられている。そして、スコープ1の接眼部3で得られるスコープ1の観察像の一部又は全部が光学素子19を経てCCD20に撮像されるようになっている。なお、光学素子19のズームレンズは図示しないモータによって、ズームイン、ズームアウトが可能となっている。
【0015】
さらに、第2の部品収納室18内にはCCD20をその光軸方向に対して直交する平面内に沿って直交する2方向、例えば上下方向および左右方向に駆動するCCD移動機構21が設けられている。このCCD移動機構21には図2(B)に示すように同図中で左右方向に移動する第1のプレート22aと、同図中で上下方向に移動する第2のプレート22bとが設けられている。ここで、第1のプレート22aはこの第1のプレート22aの上下に配設された4つのローラ23aによって左右方向に移動可能に支持されている。同様に、第2のプレート22bはこの第2のプレート22bの左右に配設された4つのローラ23bによって上下方向に移動可能に支持されている。
【0016】
また、第1のプレート22aの板面には上下方向に伸びるガイド用の2つのスリット24aが設けられている。同様に、第2のプレート22bの板面には左右方向に伸びるガイド用の2つのスリット24bが設けられている。
【0017】
さらに、第1のプレート22aの一側部には第1の係合ピン25aが突設されている。この係合ピン25aは第1のステッピングモータ26aにより回転する送りネジ27aのミゾにはめ込まれている。そして、第1のステッピングモータ26aの駆動時には第1のステッピングモータ26aの回転運動が送りネジ27aのミゾと係合ピン25aとの係合部によって直動運動に変換され、第1のプレート22aが左右方向に移動されるようになっている。
【0018】
同様に、第2のプレート22bの一側部には第2の係合ピン25bが突設されている。この係合ピン25bは第2のステッピングモータ26bにより回転する送りネジ27bのミゾにはめ込まれている。そして、第2のステッピングモータ26bの駆動時には第2のステッピングモータ26bの回転運動が送りネジ27bのミゾと係合ピン25bとの係合部によって直動運動に変換され、第2のプレート22bが上下方向に移動されるようになっている。
【0019】
また、ケーシング16の第1の部品収納室17と第2の部品収納室18との間の仕切り壁28の中央部位にはCCD20の台座29よりも大径な開口部30が形成されている。
【0020】
さらに、CCD20の台座29はCCD移動機構21のスライダ31に固定されている。このスライダ31はポリアセタールや、超高分子量ポリエチレン等の摺動性の良い材料でできている。
【0021】
また、スライダ31の下面には4本の操作ピン32が突設されている。これらの操作ピン32はCCD移動機構21の第1のプレート22aの2つのスリット24aと第2のプレート22bの2つのスリット24bとの間の交点に挿入されている。ここで、スライダ31は第1のプレート22aの上に板ばね31aを介して重ねられた状態で配設されている。そして、スライダ31は板ばね31aのバネ力によりTVカメラ15内の仕切り壁28に移動可能に押し当てられた状態で圧接されている。
【0022】
したがって、CCD20が装着されたスライダ31は第1のステッピングモータ26aの動作により図2(B)中の左右方向に移動操作され、第2のステッピングモータ26bの動作により同図中の上下方向に移動操作されるようになっている。そして、第1のステッピングモータ26aおよび第2のステッピングモータ26bによってTVカメラ15の撮像用の光学部品、本実施の形態ではCCD20を移動させ、TVカメラ15の撮像範囲を変更させることにより、スコープ1の視野を移動させるアクチュエータ(内視鏡視野移動手段)33が形成されている。なお、このアクチュエータ33としてはステッピングモータの他、DCサーボモータ、ボイスコイル、圧電振動子を使用したアクチュエータ、超音波モータ、形状記憶合金等が使用できる。
【0023】
また、CCD20には図2(C)に示すようにフレキシブルプリント板34の一端が接続されている。このフレキシブルプリント板34の他端はTVカメラ15内の適宜の固定部に固定されたCCD制御回路35に接続されている。なお、フレキシブルプリント板34の中間部には略U字状に折り返された折り返し部36が形成されており、CCD20の移動に対応できるようになっている。
【0024】
また、TVカメラ15には鉗子追尾装置37が接続されている。この鉗子追尾装置37にはアクチュエータ33を、動作状態と、停止状態とに切換える後述する2つの操作スイッチ(切換え手段)38,38´および例えばTVモニタ、HMD(HEAD MOUNTED DISPLAY:頭部装着型ディスプレー)等の表示モニタ(表示手段)39がそれぞれ接続されている。
【0025】
さらに、鉗子追尾装置37には図3に示すように映像信号回路40、A/Dコンバータ41、画像演算処理回路42、アクチュエータ制御回路(制御手段)43が設けられている。ここで、映像信号回路40にはCCD20および表示モニタ39がそれぞれ接続されている。そして、CCD20の映像信号は映像信号回路40に送られるようになっている。この映像信号回路40はCCD20で得られた信号をNTSCや、RGB等の映像信号に変換するものである。
【0026】
また、映像信号回路40からの出力信号は表示モニタ39に入力されるとともに、A/Dコンバータ41に入力されるようになっている。このA/Dコンバータ41は映像信号回路40から送られるアナログの映像信号をデジタル信号に変換して画像演算処理回路42に出力するものである。
【0027】
さらに、画像演算処理回路42には色相関演算回路が内蔵されている。そして、この画像演算処理回路42はA/Dコンバータ41からの出力信号に基づいて後述する画像演算処理を行い、鉗子11,11´の先端の位置を求め、さらに、CCD20の位置、移動量を求め、アクチュエータ33の位置、移動量に関する指令をアクチュエータ制御回路43に送るものである。
【0028】
また、この画像演算処理回路42には図4に示すように仮想点設定部(仮想点設定手段)44と、仮想点選択部(仮想点選択手段)45と、目標物識別部(目標物識別手段)46と、位置検出部(位置検出手段)47とが設けられている。ここで、仮想点設定部44は表示モニタ39の表示画面内に図6(A)に示すように複数、本実施の形態では1〜14の仮想点Pを設定するものである。なお、表示モニタ39の表示画面上の各仮想点Pの座標値はアクチュエータ制御回路43に記憶されている。
【0029】
また、仮想点選択部45は鉗子追尾装置37の図示しないフロントパネル上のスイッチ等の入力装置48に接続されている。そして、仮想点選択部45はこの入力装置48から出力される制御信号に基いて表示モニタ39の表示画面上の任意の位置の仮想点Pを選択するものである。
【0030】
さらに、目標物識別部46は表示モニタ39に表示される観察視野内の目標物を識別するものである。なお、本実施の形態では目標物として、例えば図1(A)に示すように第1の鉗子11の挿入部12の先端部に設けた色マーカーM、または第2の鉗子11´の挿入部12´の先端部に設けた色マーカーM´が使用される。これらの色マーカーM,M´は各鉗子挿入部12,12´の先端側に周方向に沿ってリング状に取付けられている。
【0031】
また、位置検出部47は目標物識別部46からの出力データに基いて鉗子11,11´の色マーカーM,M´の位置を検出するものである。なお、鉗子11,11´の先端の位置を検出する方式としては、図5に示すように鉗子11,11´の先端に設けた色マーカーM,M´の重心位置を検出する方式(後述する)がある。
【0032】
また、アクチュエータ制御回路43では、画像演算処理回路42で求められた位置、移動量に関する指令通りにアクチュエータ33が動作するようにこのアクチュエータ33の制御を行うものである。すなわち、本実施の形態ではアクチュエータ制御回路43は仮想点選択部45で選択された仮想点Pと目標物Mの位置とが一致するようにアクチュエータ33の動作を制御するようになっている。
【0033】
ここで、アクチュエータ33が本実施の形態のようにステッピングモータの場合はオープンループ制御を行い、DCモータの場合にはエンコーダからの帰還信号を使用したクローズドループ制御を行うようになっている。
【0034】
さらに、このアクチュエータ制御回路43にはCCD20のアクチュエータ33および2つの操作スイッチ38,38´がそれぞれ接続されている。ここで、一方の第1の操作スイッチ38は第1の鉗子11のハンドル部14に取付けられている。そして、第1の鉗子11のハンドル部14を使用者が手指で把持したままの状態で、第1の操作スイッチ38を操作可能となっている。さらに、他方の第2の操作スイッチ38´は第2の鉗子11´のハンドル部14´に取付けられている。そして、この場合も同様に第2の鉗子11´のハンドル部14´を使用者が手指で把持したままの状態で、第2の操作スイッチ38´を操作可能となっている。
【0035】
また、第1,第2の各操作スイッチ38,38´には鉗子11,11´の先端の追尾機能の有効/無効の切換え操作を行う切換え操作ボタン(切換え手段)49,49´が設けられている。
【0036】
そして、各操作スイッチ38,38´の操作時には例えば、切換え操作ボタン49、または49´の押下操作時のみ、鉗子追尾装置37の画像演算処理回路42により検出された鉗子11、または11´の先端位置が表示モニタ39の概ね中央に配置されるように、鉗子11、または11´の先端位置に追従してCCD20の移動位置が制御されるようになっている。ここで、図1(B)に示すように表示モニタ39の概ね中央位置に鉗子11、または11´の先端位置が表示されていない状態で、操作スイッチ38、または38´の操作ボタン44、または44´を押した場合には、鉗子11、または11´の先端部分が予め指定された速度で表示モニタ39の中央位置に移動するように、CCD20の移動制御が行われるようになっている。
【0037】
次に、上記構成の作用について説明する。まず、本実施の形態の内視鏡装置の使用時には図1(A)に示すように予め例えば患者の腹壁部8等に穿刺されたトラカール9内にスコープ1の挿入部2が挿通され、体腔内に挿入される。さらに、患者の腹壁部8等にはスコープ1の挿入場所とは別の挿入場所から鉗子11,11´がそれぞれ独立に体腔内に挿入される。このとき、鉗子11,11´の先端の処置部13,13´がスコープ1の接眼部3による視野範囲R1 内に挿入される状態にセットされる。
【0038】
また、スコープ1の接眼部3にはTVカメラ15が取付けられている。そして、このスコープ1の観察像の一部がTVカメラ15によって撮像され、表示モニタ39に図1(B)に示すように表示される。ここで、TVカメラ15の光学素子19を経てCCD20に撮像される観察像の視野範囲R2 はスコープ1の接眼部3による視野範囲R1 より小さくなっており、スコープ1の接眼部3による視野範囲R1 の一部の観察像がCCD20によって撮像される。なお、表示画面R1 中の矩形枠はTVカメラ15の光学素子19を経てCCD20に撮像される観察像の視野範囲R2 を示している。
【0039】
なお、スコープ1とTVカメラ15とは着脱が可能に取付けられている。これにより、スコープ1を例えば直視スコープから斜視スコープというように視野角の異なるスコープに交換することが容易となる。また、消毒滅菌の際には、それぞれを取り外すことによって、別々に滅菌消毒を行うことができる。
【0040】
そして、TVカメラ15によるスコープ1の観察像の撮像中、操作スイッチ38、または38´の切換え操作ボタン49、または49´が押下操作された場合には鉗子追尾装置37による第1の鉗子11、または第2の鉗子11´の先端の追尾機能が作動する。この鉗子追尾機能の作動時にはCCD20の映像信号が映像信号回路40、A/Dコンバータ41を順次介して画像演算処理回路42に送られ、この画像演算処理回路42でA/Dコンバータ41からの出力信号に基づいて図5のフローチャートに示す画像演算処理が次の通り行われ、第1の鉗子11、または第2の鉗子11´の先端の位置が求められる。
【0041】
図5のフローチャートの画像演算処理では、まずTVカメラ15で撮像された手術部位の観察画像の取り込みが行われる(ステップS1)。この画像はビデオ信号に変換された後、色相関演算回路に入力される。この色相関演算回路ではTVカメラ15で撮像された第1の鉗子11の挿入部12の色マーカーM、または第2の鉗子11´の挿入部12´の色マーカーM´の色の抽出が行われる(ステップS2)。続いて、2値化(ステップS3)、重心演算(ステップS4)を行い、表示モニタ39のR2 画面内での第1の鉗子11の色マーカーMの位置、または第2の鉗子11´の色マーカーM´の位置が算出される。
【0042】
この処理により算出された第1の鉗子11、または第2の鉗子11´の先端位置の算出データからCCD20の移動量の演算が行われ(ステップS6)、CCD20の移動量のデータが出力される(ステップS7)。
【0043】
続いて、この画像演算処理回路42から出力される信号がアクチュエータ制御回路43に入力される。このアクチュエータ制御回路43では画像演算処理回路42で求められた第1の鉗子11、または第2の鉗子11´の先端位置およびCCD20の移動量に関する指令通りにアクチュエータ33が動作するようにアクチュエータ33の制御信号が出力される。
【0044】
そして、このアクチュエータ制御回路43からの制御信号によってアクチュエータ33の第1のステッピングモータ26aおよび第2のステッピングモータ26bがそれぞれ駆動され、CCD移動機構21のスライダ31上のCCD20の位置がその光軸方向と直交する方向に移動される。したがって、鉗子追尾装置37による第1の鉗子11、または第2の鉗子11´の先端の追尾機能の作動中は、TVカメラ15によって撮像される第1の鉗子11の挿入部12、または第2の鉗子11´の挿入部12´の先端を追尾する状態でTVカメラ15の撮像範囲を変更する第1の鉗子11、または第2の鉗子11´の先端の追尾動作が行われる。
【0045】
また、本実施の形態の鉗子追尾機能の作動時には表示モニタ39の表示画面R2 上に図6(A)に示すような1〜14の仮想点Pが設定されている。なお、1〜14の仮想点Pは必要に応じて表示モニタ39の表示画面上に表示するようにしても良い。
【0046】
そして、鉗子追尾装置37のフロントパネル上のスイッチ等の入力装置48によって表示モニタ39の表示画面R2 上の1〜14の仮想点Pのいずれかが任意に設定される。ここで、今、例えば図6(A),図7(C)に示すように表示モニタ39の表示画面R2 上に表示されている第1の鉗子11の処置部13が表示モニタ39の表示画面R2 上の中央位置Oから外れた位置に配置されている場合には本実施の形態の鉗子追尾機能が作動される。
【0047】
ここで、仮想点選択部45によって例えば表示モニタ39の表示画面R2 上の中央の0点位置の仮想点Pが選択された場合にはこの状態で、次に例えば第1の鉗子11の操作スイッチ38の切換え操作ボタン49を押すと色マーカーMの重心Bが表示モニタ39の表示画面R2 の中央の仮想点Pの0点位置に移動するようにアクチュエータ33の動作が制御され、CCD20が動く。その結果、図7(D)に示すように第1の鉗子11の処置部13の先端は画面中央の0点位置よりも左側に移動する。
【0048】
そのため、この場合には表示モニタ39の表示画面R2 の中央の0点位置の仮想点Pよりも右側の8点位置の仮想点Pが選択される。この状態で、次に例えば第1の鉗子11の操作スイッチ38の切換え操作ボタン49を押すと図5のステップS6によって色マーカーMの重心Bが予め選択した8点位置の仮想点Pに一致するように移動量の演算が行われる。
【0049】
従って、この場合には色マーカーMの重心Bが表示モニタ39の表示画面R2 の8点位置の仮想点Pに移動するようにアクチュエータ33の動作が制御され、CCD20が動く。その結果、図6(B),(C)に示すように色マーカーMの重心Bは8点位置の仮想点Pと一致し、第1の鉗子11の処置部13の先端は画面中心0の近傍に配置されることになる。
【0050】
また、図7(A)に示すように第1の鉗子11の先端が表示モニタ39の表示画面R2 の左側から入ってくるような場合には表示画面R2 の中央の0点位置の仮想点Pよりも左側の7点位置の仮想点Pが予め選択される。この状態で、第1の鉗子11の操作スイッチ38の切換え操作ボタン49を押すことで、アクチュエータ制御回路43によって色マーカーMの重心Bが7点位置の仮想点Pに一致するようにアクチュエータ33の動作が制御され、CCD20を動かす。
【0051】
なお、第2の鉗子11´の操作スイッチ38´の切換え操作ボタン49´を押した場合には第2の鉗子11´の追尾機能が駆動され、第1の鉗子11の場合と同様に動作する。
【0052】
そこで、上記構成のものにあっては次の効果を奏する。すなわち、本実施の形態では表示モニタ39の表示画面内に予め中心点O、及び、中心以外の点を含む複数の仮想点Pを仮想点設定部44によって設定し、仮想点選択部45によって表示モニタ39の表示画面R2 上の任意の位置の仮想点Pを選択する。ここで、第1の鉗子11の第1の操作スイッチ38の切換え操作ボタン49、または第2の鉗子11´の第2の操作スイッチ38´の切換え操作ボタン49´によってCCD20のアクチュエータ33を動作状態に切換えた場合には表示モニタ39に表示される観察視野内の第1の鉗子11の挿入部12の色マーカーM、または第2の鉗子11´の挿入部12´の色マーカーM´が目標物識別部46によって識別され、この目標物識別部46からの出力データに基いて位置検出部47によって色マーカーM、またはM´の位置を検出する。その後、仮想点選択部45で選択された仮想点Pと色マーカーM、またはM´の位置とが一致するようにアクチュエータ制御回路43によってアクチュエータ33を動かすようにしたので、色マーカーM、またはM´を取付ける位置によらず、処置を行う第1の鉗子11の処置部13の先端、または第2の鉗子11´の処置部13´の先端を表示モニタ39の表示画面R2 の中央位置に配置させることができる。そのため、色マーカーM、またはM´等の観察視野内の目標物を鉗子11、または11´の先端部に付けない場合でも、鉗子11、または11´の先端部を表示モニタ39の表示画面R2 の中央部に移動させるように制御することができ、作業性が優れる。
【0053】
また、色マーカーM,M´は各鉗子11,11´の挿入部12,12´の先端側に周方向に沿ってリング状に取付けられているので、各鉗子11,11´の処置部13,13´の先端に色マーカーM,M´を付けるよりも表示面積を大きくすることができる。
【0054】
さらに、色マーカーM,M´は各鉗子挿入部12,12´の先端側にリング状に取付けられているので、各鉗子11,11´を周方向に回転させても色抽出能力が変化するおそれがない。
【0055】
また、本実施の形態の1〜14の仮想点Pの間隔は各鉗子11,11´の処置部13,13´の先端と色マーカーM,M´の位置に応じて、例えば鉗子追尾装置37のフロントパネル上のスイッチ等の入力装置48によって調整可能にしても良いし、TVカメラ15の光学素子19のズームレンズのズーム倍率に応じて自動的に変更するようにしても良い。又、両者を組合せても良い。
【0056】
そこで、上記構成のものにあっては表示モニタ39の表示画面R2 上の各鉗子11,11´の処置部13,13´の先端と色マーカーM,M´との間の距離と仮想点Pの間隔とを一致させることが可能となる効果がある。
【0057】
また、本実施の形態の1〜14の仮想点Pは第1の鉗子11の操作スイッチ38と、第2の鉗子11´の操作スイッチ38´とにそれぞれ対応させて別々に設定できるようにしても良い。この場合、例えば、第1の鉗子11の色マーカーMを第1の色に設定し、第2の鉗子11´の色マーカーM´の色を第1の色とは異なる第2の色に設定することにより、各々異なる色の色マーカーを取付けるようになっている。
【0058】
そして、例えば、第1の鉗子11の操作スイッチ38を押したときには、第1の色の色マーカーMを抽出し、この色マーカーMの重心が仮想点Pと一致するようにアクチュエータ33の動作が制御され、CCD20が移動される。また、第2の鉗子11´の操作スイッチ38´を押したときには第2の色の色マーカーM´を抽出し、この色マーカーM´の重心が仮想点Pと一致するようにアクチュエータ33の動作が制御され、CCD20が移動される。
【0059】
そこで、上記構成のものにあっては表示モニタ39の表示画面R2 上に2つ以上の鉗子11,11´がある場合でも、各鉗子11,11´の処置部13,13´の先端を表示モニタ39の表示画面R2 の中央位置に集まるように制御することができる効果がある。
【0060】
また、図8乃至図10は本発明の第2の実施の形態を示すものである。本実施の形態では図8に示すように内視鏡装置で使用される鉗子11の挿入部12の先端側に異なる色の色マーカー51A,51Bが取付けられている。
【0061】
さらに、図9に示すように本実施の形態の画像演算処理回路42の内部には、第1の色マーカー重心検出部52と、第2の色マーカー重心検出部53と、重心比較部54と、色マーカー位置算出部55とが設けられている。そして、第1の色マーカー重心検出部52および第2の色マーカー重心検出部53の各々の出力は重心比較部54に入力される。この重心比較部54では、第1の色マーカー重心検出部52および第2の色マーカー重心検出部53の各々の出力の座標の差を算出し、色マーカー位置算出部55に入力される。
【0062】
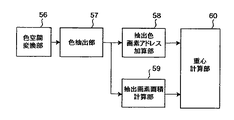
また、第1,第2の色マーカー重心検出部52,53は、A/Dコンバータ41から入力されたNTSC,Y/C等の信号を図10に示すように色空間変換部56にてRGB,YIQ HSI等の既知の色空間に変換し、その色空間内に設けた色マーカー51A,51Bにそれぞれ対応したスレッェホールド値にて色抽出部57にて色抽出、2値化を行い、上記色抽出されたエリアの各画素の表示モニタ39の表示画面R2 での画素アドレス、及び画素面積(画素数)が抽出色画素アドレス加算部58、抽出画素面積計算部59でそれぞれ算出され、抽出された色マーカーの重心が重心計算部60によって計算される。
【0063】
次に、上記構成の作用について説明する。本実施の形態では、第1の色マーカー重心検出部52によって一方の色マーカー51Aの重心を、第2の色マーカー重心検出部53によって他方の色マーカー51Bの重心をそれぞれ算出する。
【0064】
続いて、重心比較部54で算出される各色マーカー51A,51Bの重心値の座標の差の値が、予め設定された一定の設定値よりも小さければ、重心比較部54によって正しく色マーカー51A,51Bの抽出ができた状態として鉗子11の先端側に近い色マーカー51Aの重心値を色マーカ位置算出部55に入力する。ここで、重心比較部54で算出される各色マーカー51A,51Bの重心値の座標の差の値が、一定の設定値以上のときにはエラーとして、処理を行う。
【0065】
さらに、色マーカー位置算出部55では、上記色マーカー51A,51Bの重心位置と表示モニタ39の表示画面R2 の画面中心、又は予め決めた仮想点Pへ動かすためのCCD20の移動量を算出する。なお、エラーのときにはCCD20を動かさないようにする。
【0066】
そこで、上記構成のものにあっては表示モニタ39の表示画面R2 の画面中に擬色、ノイズが発生しても色マーカー51A,51Bの位置を正しく検出でき、術者の意図しない位置にCCD20が動くことを防止できる効果がある。
【0067】
また、図11は第2の実施の形態(図8乃至図10参照)の第1の変形例を示すものである。本変形例には単一の色マーカ重心検出部52に第1の重心記憶部61と第2の重心記憶部62とが接続されている。そして、色マーカ重心検出部52にて、まず、第1の色マーカ51Aを検出し、その結果を第1の重心記憶部61に記憶したのち、次に同じ色マーカ重心検出部52にて第2の色マーカ51Bを検出し、第2の重心記憶部62に記憶し、重心比較部54で重心比較を行う構成になっている。
そこで、上記構成のものにあっては色マーカ重心検出部52の回路が1つで済み、内視鏡装置の装置全体の回路構成を簡素化できる効果がある。
【0068】
また、第2の実施の形態(図8乃至図10参照)の第2の変形例として第1の色マーカー重心検出部52と、第2の色マーカー重心検出部53とで、同じ色空間を用い、色マーカー51A,51Bの色に応じたスレッュホールド値を設定して色抽出を行っても良いし、各々異なる色空間で抽出しても良い。
【0069】
ここでは、例えば、第1の色マーカー重心検出部52では色空間を(L,a,b)、抽出パラメータ1を用い、第2の色マーカー重心検出部53では色空間を(Y,I,Q)、抽出パラメータ2を用いる。
【0070】
また、第2の実施の形態の第3の変形例として色マーカーは1つのままで使用し、同一の色マーカーに対して上記のように異なる色空間、パラメータにて2回の色抽出を行い、重心比較を行うようにしても良い。
そこで、上記構成のものにあっては第2の実施の形態の第1の変形例と同様に内視鏡装置の装置全体の回路構成を簡素化できる効果がある。
【0071】
また、図12および図13(A),(B)は第2の実施の形態の第4の変形例を示すものである。本変形例は鉗子11の色マーカーMの抽出において、図12中で、右側の表示モニタ39の表示画面R2 に示すようにこの表示画面R2 上に鉗子11の色マーカーMが無い場合に、TVカメラ15内の光学素子19のズームレンズを動かすことにより、鉗子11の色マーカーMを表示モニタ39の表示画面R2 に表示させ、鉗子11の先端の処置部13を表示させる構成にしたものである。
【0072】
すなわち、本変形例では、図12中で、右側の表示モニタ39の表示画面R2 に示すようにこの表示画面R2 上に鉗子11の色マーカーMが挿入されていない状態で、操作スイッチ38の切換え操作ボタン49が押された場合には、まず、現在のズーム倍率を記憶し、自動的にズームレンズをズームアウト側へ動かす動作が行われる。
【0073】
このズームレンズのズームアウト動作にともない図12中で、左側の表示モニタ39の表示画面R2 ´に鉗子11の色マーカーMが入る。そして、色マーカーMの検出が出来た時点で、ズームレンズのズームアウト動作を停止し、図13(A)に示すように表示モニタ39の表示画面R2 ´の画面中央、または仮想点Pに色マーカーMの重心が来るようにCCD20を移動する。
【0074】
次に、色マーカーMの重心位置を画面中央、または仮想点Pと一致させたままの状態で、ズーム倍率を記憶した値にまでもどす。これにより、図13(B)に示すように表示モニタ39の表示画面R2 に色マーカーMを挿入させ、鉗子11の先端の処置部13を表示させることができる。
【0075】
そこで、上記構成のものにあっては上記手順にてTVカメラ15内の光学素子19のズームレンズとCCD20を動かすことで表示モニタ39の表示画面R2 内に色マーカーMが無くても、色マーカーMを追尾してCCD20を動かすことができる効果がある。
【0076】
また、図14(A),(B)は本発明の第3の実施の形態を示すものである。本実施の形態は表示モニタ39の表示画面R2 の一部に色抽出を行うエリアR3 を限定して設けたものである。
【0077】
そして、本実施の形態では表示モニタ39の表示画面R2 内の色抽出エリアR3 の中に鉗子11の色マーカーMを入れた状態で、鉗子11の操作スイッチ38の切換え操作ボタン49を押す。この操作スイッチ38の切換え操作ボタン49を押した時点の色抽出エリアR3 内の色マーカ重心位置は記憶される。次に、鉗子11の色マーカーMの重心が常に上記記憶した重心位置となるようにCCD20を動かす。
【0078】
そこで、本実施の形態では表示モニタ39の表示画面R2 の一部に色抽出を行うエリアR3 を限定して設けたので、色抽出エリアR3 を小さくできる。そのため、色抽出回路を小さく構成できる効果がある。
【0079】
なお、本発明は上記実施の形態に限定されるものではない。例えば、図15(A)に示す第3の実施の形態の第1の変形例のように表示モニタ39の表示画面R2 の内部の外周部位に略矩形枠状の色抽出エリアR3 を配設してもよい。
【0080】
また、図15(B)に示す第3の実施の形態の第2の変形例のように表示モニタ39の表示画面R2 の外側で、かつ、映像信号(H方向のTV信号およびV方向のTV信号)のあるエリアに略矩形枠状の色抽出エリアR3 を配設してもよい。さらに、その他、本発明の要旨を逸脱しない範囲で種々変形実施できることは勿論である。
【0081】
次に、本出願の他の特徴的な技術事項を下記の通り付記する。
記
(付記項1) 内視鏡と、この内視鏡による観察視野内の画像を表示する手段と、前記表示する手段に設定した複数の仮想点と、前記仮想点を選択する手段と、この表示手段に表示される前記観察視野内の目標物を識別する手段と、前記目標物の位置を検出する手段と、前記内視鏡の視野を移動させる内視鏡視野移動手段と、前記選択された仮想点と目標物の位置が一致するように内視鏡視野移動手段を動かす制御手段と、上記内視鏡視野移動手段を、動作状態、停止状態に切り替える少なくとも一つの動作切り替え手段と、を有することを特徴とする内視鏡装置。
【0082】
(付記項2) 付記項1において、前記仮想点は格子状であることを特徴とする内視鏡装置。
(付記項3) 付記項1において、前記仮想点の間隔は調整可能であることを特徴とする内視鏡装置。
【0083】
(付記項4) 付記項1において、前記仮想点の間隔はズーム倍率に応じて変化することを特徴とする内視鏡装置。
(付記項5) 付記項1において、前記仮想点は複数選択可能であることを特徴とする内視鏡装置。
【0084】
(付記項6) 付記項1において、前記仮想点は前記表示する手段の中心を含むことを特徴とする内視鏡装置。
(付記項7) 付記項6において、選択された仮想点は、動作切り替え手段に1対1で対応することを特徴とする内視鏡装置。
【0085】
(付記項8) 付記項1において、目標物を識別する手段は色抽出手段であることを特徴とする内視鏡装置。
(付記項1〜8の従来技術) 鉗子先端のマーカを検出し、検子先端(色マーカ)の位置を決めることが、特開平6−30896に開示されている。
【0086】
(付記項1〜8が解決しようとする課題) 鉗子先端に色マーカを付けた場合、色マーカの面積が小さく、色抽出能が低くなるという問題がある。また、鉗子挿入部に色マーカを付けたときには、色マーカを大きく、周状に付けられるが、図5に示すように色マーカが画面中央に来るようにCCD素子を動かしたときに鉗子先端が画面中央からずれてしまう。
【0087】
(付記項1〜8の目的) 色マーカを鉗子先端に付けない場合でも、鉗子先端が画面の中央部に来るようにした内視鏡装置を提供する。
(付記項1〜8の作用) TV表示画面内に予め中心、及び、中心以外の点を設定しておき、その設定した点と色マーカが一致するようにCCDを動かすようにした。
【0088】
(付記項1〜8の効果) 色マーカを取付ける位置によらず処置を行う鉗子先端を画面中央部に位置させることができる。
(付記項9) 内視鏡と、この内視鏡による観察視野内の画像を表示する手段と、この表示手段に表示される前記観察視野内の目標物を識別する複数の手段と、前記目標物の位置を検出する手段と、前記内視鏡の視野を移動させる内視鏡視野移動手段と、上記内視鏡視野移動手段を、動作状態、停止状態に切り替える少なくとも一つの動作切り替え手段と、を有することを特徴とする内視鏡装置。
【0089】
(付記項10) 付記項9において、複数の手段は、処置具に付けた複数の色マーカであることを特徴とする内視鏡装置。
(付記項11) 付記項9において、複数の手段は、異なる色空間での色抽出であることを特徴とする内視鏡装置。
【0090】
(付記項12) 付記項9において、複数の手段は、異なる色抽出パラメータであることを特徴とする内視鏡装置。
(付記項13) 付記項9において、位置を検出する手段は、目標物を識別する複数の手段の結果を比較する手段であることを特徴とする内視鏡装置。
【0091】
(付記項14) 内視鏡と、この内視鏡による観察視野内の画像を表示する手段と、この表示手段に表示される前記観察視野内の目標物を識別する手段と、前記目標物の位置を検出する手段と、前記内視鏡の視野を移動させる内視鏡視野移動手段と、前記選択された仮想点と目標物の位置が一致するように内視鏡視野移動手段を動かす制御手段と、上記内視鏡視野移動手段を、動作状態、停止状態に切り替える少なくとも一つの動作切り替え手段と、ズーム倍率を記憶する手段と、前記動作切り替え手段が動作状態の時に、前記観察視野内に識別する目標物がない場合に、目標物が識別可能となるまでいったんズームアウトし、目標物識別後、仮想点と目標物の位置を一致させたままで前記記憶されたズーム倍率に戻すことを特徴とする内視鏡装置。
【0092】
(付記項9〜14の従来技術) また、鉗子先端に取り付けた色マーカを検出し、その色マーカがTV表示画面の中央に来るように、カメラヘッド内のCCD素子を移動させる内視鏡システムが特願平7−214824に開示されている。
【0093】
(付記項9〜14が解決しようとする課題) 抽出された色マーカの重心を計算する場合に、擬色、ノイズにより重心位置がずれてしまう。
(付記項9〜14の目的) 色マーカの抽出精度を上げた内視鏡装置を提供する。
【0094】
(付記項9〜14の作用) 色マーカ抽出の精度を上げるために、複数の色マーカ、または複数の抽出方法にて色マーカを抽出し、各抽出結果を比較して精度を向上させた。
【0095】
(付記項9〜14の効果) 擬色、ノイズが発生しても正しい色マーカ位置を検出できる。TV表示画面内に色マーカが無い場合でも色マーカの追尾が可能となる。
【0096】
(付記項15) 内視鏡と、この内視鏡による観察視野内の画像を表示する手段と、前記表示する手段に設定した仮想点と、この表示手段に表示される前記観察視野内の目標物を識別する手段と、前記表示する手段に表示される前記観察視野内の画像内で、目標物を識別するエリアと識別しないエリアをわける手段と、前記目標物の位置を検出する手段と、前記内視鏡の視野を移動させる内視鏡視野移動手段と、上記内視鏡視野移動手段を、動作状態、停止状態に切り替える動作切り替え手段と、前記動作切り替え手段が動作状態の時に、目標物識別エリア内の目標物の位置を保持するように内視鏡視野移動手段を動かすことを特徴とする内視鏡装置。
【0097】
(付記項16) 付記項15において、目標物を識別するエリアは観察視野内の画像を表示する手段による表示範囲の一部であることを特徴とする内視鏡装置。
【0098】
(付記項17) 付記項15において、目標物を識別するエリアは観察視野内の画像を表示する手段による表示範囲の周囲であることを特徴とする内視鏡装置。
【0099】
(付記項18) 付記項15において、目標物を識別するエリアは観察視野内の画像を表示する手段による表示範囲の外側であることを特徴とする内視鏡装置。
【0100】
(付記項15〜18の従来技術) また、上記CCDを移動させるべく色マーカを抽出エリアとそれ以外のエリアを分離する方法について特願平8−80169に開示されている。
【0101】
(付記項15〜18が解決しようとする課題) 色抽出を全画面に対して行うと、色抽出、重心計算のために必要な回路が大きくなる。
(付記項15〜18の目的) 小さな回路規模で、色マーカを検出し、視野(CCD)を変更可能な内視鏡装置を提供する。
【0102】
(付記項15〜18の作用) 色抽出エリアを小さくすることで、色抽出の回路規模を小さくした。
(付記項15〜18の効果) 色抽出エリアを小さくでき、回路を小さく構成できる。
【0103】
【発明の効果】
本発明によれば表示手段の表示画面内に予め複数の仮想点を設定し、仮想点選択手段によって表示手段の表示画面上の任意の位置の仮想点を選択した状態で、切換え手段によって内視鏡視野移動手段を動作状態に切換えた場合に表示手段に表示される観察視野内の目標物を目標物識別手段によって識別させ、この目標物識別手段からの出力データに基いて位置検出手段によって目標物の位置を検出した後、仮想点選択手段で選択された仮想点と目標物の位置とが一致するように制御手段によって内視鏡視野移動手段を動かすようにしたので、色マーカー等の観察視野内の目標物を処置具の先端部に付けない場合でも、処置具の先端部を表示手段の画面の中央部に移動させるように制御することができ、作業性の向上を図ることができる。
【図面の簡単な説明】
【図1】 本発明の第1の実施の形態を示すもので、(A)は内視鏡装置全体の概略構成図、(B)は表示モニタの画面を示す平面図。
【図2】 (A)は第1の実施の形態のスコープの接眼部に取付けられたTVカメラの縦断面図、(B)はCCD移動機構の概略構成図、(C)はCCDに接続されたフレキシブルプリント板の配設状態を示す側面図。
【図3】 第1の実施の形態の鉗子追尾装置の概略構成図。
【図4】 第1の実施の形態の画像演算処理回路の内部構成を示す概略構成図。
【図5】 第1の実施の形態の鉗子追尾装置による鉗子の先端の追尾機能動作を説明するためのフローチャート。
【図6】 第1の実施の形態の鉗子追尾装置による鉗子の先端の追尾機能動作を説明するための説明図。
【図7】 第1の実施の形態の鉗子追尾装置による鉗子の先端の追尾機能動作を説明するための他の説明図。
【図8】 本発明の第2の実施の形態の内視鏡装置で使用される鉗子の色マーカーの取付け状態を示す要部の側面図。
【図9】 第2の実施の形態の画像演算処理回路の内部構成を示す概略構成図。
【図10】 第2の実施の形態の色マーカーの重心位置の計算手段を示す概略構成図。
【図11】 第2の実施の形態の第1の変形例の色マーカーの重心位置の計算手段を示す概略構成図。
【図12】 第2の実施の形態の第4の変形例の鉗子追尾装置による鉗子の先端を表示モニタの表示画面内に挿入するズームレンズのズームアウト動作を説明するための説明図。
【図13】 第2の実施の形態の第4の変形例の鉗子追尾装置による表示モニタの表示画面に鉗子の先端の処置部を挿入させる鉗子の先端の追尾機能動作を説明するための説明図。
【図14】 本発明の第3の実施の形態の動作を説明するための説明図。
【図15】 (A)は第3の実施の形態の第1の変形例を示す表示モニタの平面図、(B)は第3の実施の形態の第2の変形例を示す表示モニタの平面図。
【符号の説明】
1 スコープ(内視鏡)
11 第1の鉗子(処置具)
11´ 第2の鉗子(処置具)
33 アクチュエータ(内視鏡視野移動手段)
38,38´ 操作スイッチ(切換え手段)
39 表示モニタ(表示手段)
42 画像演算処理回路
43 アクチュエータ制御回路(制御手段)
44 仮想点設定部(仮想点設定手段)
45 仮想点選択部(仮想点選択手段)
46 目標物識別部(目標物識別手段)
47 位置検出部(位置検出手段)
P 仮想点
M,M´ 色マーカー(目標物)
Claims (1)
- 内視鏡と、
この内視鏡による観察視野内の画像を表示する表示手段と、
前記表示手段の表示画面内に複数の仮想点を設定する仮想点設定手段と、
前記表示手段の表示画面上の任意の位置の前記仮想点を選択する仮想点選択手段と、
前記表示手段に表示される前記観察視野内の目標物を識別する目標物識別手段と、
この目標物識別手段からの出力データに基いて前記目標物の位置を検出する位置検出手段と、
前記内視鏡の視野を移動させる内視鏡視野移動手段と、
前記仮想点選択手段で選択された仮想点と前記目標物の位置とが一致するように前記内視鏡視野移動手段を動かす制御手段と、
前記内視鏡視野移動手段を、動作状態と、停止状態とに切換える切換え手段とを具備したことを特徴とする内視鏡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12091197A JP3771992B2 (ja) | 1997-05-12 | 1997-05-12 | 内視鏡装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12091197A JP3771992B2 (ja) | 1997-05-12 | 1997-05-12 | 内視鏡装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10309256A JPH10309256A (ja) | 1998-11-24 |
| JP3771992B2 true JP3771992B2 (ja) | 2006-05-10 |
Family
ID=14798053
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP12091197A Expired - Fee Related JP3771992B2 (ja) | 1997-05-12 | 1997-05-12 | 内視鏡装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3771992B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12565203B2 (en) | 2021-03-26 | 2026-03-03 | Isuzu Motors Limited | Driving control device |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009011831A1 (de) | 2009-03-05 | 2010-09-16 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zur Navigation einer Endoskopiekapsel |
| CN102905606B (zh) * | 2010-07-28 | 2015-02-04 | 奥林巴斯医疗株式会社 | 硬性镜 |
| EP3305161A4 (en) | 2015-05-28 | 2019-01-09 | Olympus Corporation | ENDOSCOPE SYSTEM |
-
1997
- 1997-05-12 JP JP12091197A patent/JP3771992B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12565203B2 (en) | 2021-03-26 | 2026-03-03 | Isuzu Motors Limited | Driving control device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10309256A (ja) | 1998-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3506809B2 (ja) | 体腔内観察装置 | |
| US6036637A (en) | Treating system utilizing an endoscope | |
| US12408823B2 (en) | Method of alerting a user to off-screen events during surgery | |
| JP3618413B2 (ja) | 内視鏡装置 | |
| US5836869A (en) | Image tracking endoscope system | |
| EP1820438B1 (en) | Body cavity interior observing apparatus | |
| US10638915B2 (en) | System for moving first insertable instrument and second insertable instrument, controller, and computer-readable storage device | |
| JP4744595B2 (ja) | 内視鏡外科手術器具 | |
| JP4179846B2 (ja) | 内視鏡手術システム | |
| US10932657B2 (en) | Endoscope with wide angle lens and adjustable view | |
| JP4027876B2 (ja) | 体腔内観察システム | |
| JPWO2020054566A1 (ja) | 医療用観察システム、医療用観察装置及び医療用観察方法 | |
| JP3532660B2 (ja) | 体腔内観察装置 | |
| WO2015151094A1 (en) | Endoscope with wide angle lens and adjustable view | |
| JP3744974B2 (ja) | 内視鏡下外科手術装置 | |
| JPH10118076A (ja) | 内視鏡下外科手術装置 | |
| JP3955126B2 (ja) | 内視鏡の視野変換装置 | |
| JP5084139B2 (ja) | 内視鏡装置 | |
| JP2005046200A (ja) | 内視鏡下手術システム | |
| JPH09266882A (ja) | 内視鏡装置 | |
| JP3771992B2 (ja) | 内視鏡装置 | |
| JP4382894B2 (ja) | 視野移動内視鏡システム | |
| JP3810165B2 (ja) | 内視鏡装置 | |
| JPH10118015A (ja) | 内視鏡下外科手術装置 | |
| JPH09149879A (ja) | 内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040408 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060213 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090217 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100217 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110217 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110217 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130217 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |