JP3831264B2 - 電気自動車の制御装置 - Google Patents
電気自動車の制御装置 Download PDFInfo
- Publication number
- JP3831264B2 JP3831264B2 JP2002011302A JP2002011302A JP3831264B2 JP 3831264 B2 JP3831264 B2 JP 3831264B2 JP 2002011302 A JP2002011302 A JP 2002011302A JP 2002011302 A JP2002011302 A JP 2002011302A JP 3831264 B2 JP3831264 B2 JP 3831264B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- command value
- torque
- phase
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
Description
【発明の属する技術分野】
本発明は、回転電機(この明細書ではモーターと呼ぶ)を走行駆動源とする電気自動車の制御装置に関する。
【0002】
【従来の技術】
モーターを走行駆動源とする電気自動車、あるいは内燃機関とモーターの両方を備え、常時または一時的にモーターのみの駆動力により走行するハイブリッド自動車では、駆動系の細い駆動軸の両端にモーターの慣性と自動車の慣性とが接続された共振系となり、発進時や追い越し加速時などのモーターが大きな駆動力を発生するときに、駆動軸を含む駆動系のねじれによる共振が発生し、自動車に振動が発生して運転フィーリングが低下するという問題がある。
【0003】
そこで、モータートルクを入力とし車速を出力とする自動車の数式化モデルを設定し、この自動車モデルにトルク指令値を入力してモーター速度を演算により推定し、実際のモーター速度と自動車モデルによるモーター速度推定値との速度差に応じた振動補償トルクを算出し、この振動補償トルクによりモーターのトルク指令値を補正することによって、モーター駆動時の共振振動を抑制するようにした電気自動車の制御装置が提案されている(例えば特開平07−163011号公報参照)。
【0004】
【発明が解決しようとする課題】
しかしながら、上述した従来の電気自動車の制御装置では、モータートルクがトルク指令値に一致するようにモーターに流れる電流を制御しており、電流制御系の応答遅れのためにトルク指令値に対して実際のモータートルクに遅れが生じる。そのため、モーター電流制御系のカットオフ周波数が抑制したい共振周波数に近い場合には、モータートルクが振動補償後のトルク指令値に追従せず、充分な振動抑制効果が得られないという問題がある。
【0005】
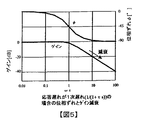
図5はモーター電流制御系を1次遅れの系と仮定した場合の周波数応答特性を示し、図6は振動補償後のトルク指令値に対する実際のモータートルクのトルク減衰と位相ずれを示す。モーター電流制御系の周波数応答特性を1次遅れ、
【数1】
1/(1+s・τ) (s;ラプラス演算子、τ;時定数)
の系と仮定した場合に、ω・τ(ωは角速度)が1を超えるとトルク指令値と実際のモータートルクとの間の位相ずれφとトルク減衰量Kがともに増大し、必要なモータートルクが得られないために共振を抑制する性能が低下する。
【0006】
本発明の目的は、駆動系の共振周波数とモーター電流制御系のカットオフ周波数とが近接していても充分な振動抑制効果が得られる電気自動車の制御装置を提供することにある。
【0007】
【課題を解決するための手段】
一実施の形態の構成を示す図1に対応づけて本発明を説明すると、
(1) 請求項1の発明は、自動車を走行駆動するモーター5と、自動車の駆動系の共振を抑制するための振動補償トルクThを演算する振動補償トルク演算手段21〜24と、振動補償トルクThに対してモーター電流制御系の応答遅れを補償するために、モーター電流制御系のカットオフ周波数近傍において位相を進ませ、且つゲインを増加させる位相進み補償手段25と、自動車を走行駆動させるためのモータートルク指令値T*に、位相進み補償手段25による位相進み補償後の振動補償トルクTxを加算して補正するトルク指令値補正手段26と、トルク指令値補正手段26による補正後のモータートルク指令値Trefに応じたモーター電流指令値I*を演算する電流指令値演算手段27と、モーター5に流れる電流Ifbがモーター電流指令値I*に一致するように電流制御を行う電流制御手段28とを備え、これにより上記目的を達成する。
(2) 請求項2の発明は、自動車を走行駆動するモーター5と、モーター5の回転速度を検出する回転速度検出手段11,21と、モータートルクを入力としモーター回転速度を出力として制御対象の自動車の動作を模擬する自動車の数式化モデルを有し、数式化モデルによりモータートルク指令値に対するモーター回転速度推定値N S を演算する回転速度推定手段22,23と、モーター回転速度検出値Nとモーター回転速度推定値N S との差に応じた振動補償トルクT h を演算する補償トルク演算手段24と、振動補償トルクT h に対してモーター電流制御系の応答遅れを補償するために、モーター電流制御系のカットオフ周波数近傍において位相を進ませ、且つゲインを増加させる位相・ゲイン調整手段25と、位相・ゲイン調整手段25による調整後の振動補償トルクT x をモータートルク指令値T * に加算する加算手段26と、加算手段26による加算値T ref に応じたモーター電流指令値I * を演算する電流指令値演算手段27と、モーター電流I fb を検出する電流検出手段10と、モーター電流検出値I fb がモーター電流指令値I * に一致するように電流制御を行う電流制御手段28とを備え、これにより上記目的を達成する。
【0008】
【発明の効果】
本発明によれば、モーター電流制御系のカットオフ周波数が抑制したい共振周波数に近い場合でも、実際のモータートルクが振動補償後のトルク指令値に追従し、充分な共振振動抑制効果が得られる。
【0009】
【発明の実施の形態】
図1は一実施の形態の構成を示す。車両コントローラー1は、アクセルペダルの踏み込み量を検出するアクセルセンサー(不図示)からの加速信号、ブレーキペダルの踏み込み圧力を検出するブレーキセンサー(不図示)からの減速信号、車速センサー(不図示)からの車速信号などに基づいて、自動車を走行駆動するためのトルク指令値T*を演算し、モーターコントローラー2へ出力する。
【0010】
モーターコントローラー2は、トルク指令値T*、モーター回転速度Nなどに基づいてモーター電流指令値I*を演算し、モーター電流Ifbがモーター電流指令値I*に一致するように電流制御を行い、モーター電圧指令値V*を演算してインバーター3を制御する。モーターコントローラー2はまた、自動車の数式化モデルを用いてモーター回転速度推定値NSを演算し、実際のモーター回転速度Nと推定値NSとに基づいて振動補償トルクThを演算し、トルク指令値T*を補正する。
【0011】
インバーター3はバッテリー4の直流電力を交流電力に変換し、3相交流モーター5に供給する。なお、3相交流モーター5は永久磁石同期モーターでもよいし、誘導モーターでもよい。モーター5の駆動力は変減速機6へ伝達され、さらに駆動軸7a、7bを介して駆動輪8a、8bに伝達される。
【0012】
電圧センサー9はバッテリー電圧Vbを検出する。また、電流センサー10はモーター5に流れる電流Ifb(この実施の形態では3相交流電流Iu、Iv、Iw)を検出する。さらに、回転センサー11はモーター5の所定の回転角度ごとにパルス信号を発生する。
【0013】
次に、モーターコントローラー2の振動抑制機能について詳細に説明する。モーターコントローラー2はマイクロコンピューターとその周辺部品から構成され、マイクロコンピューターのソフトウエア形態により図1に示す制御ブロック21〜28を構成する。回転速度検出部21は、回転センサー11から出力されるパルス信号の単位時間当たりの個数および周期に基づいてモーター5の実際の回転速度Nを検出する。加算器22は、車両コントローラー1から入力したトルク指令値T*と、後述する振動補償トルクThとの和TL(=T*+Th)を算出する。
【0014】
回転速度推定部23は、自動車の駆動トルクに相当するモーター5の出力トルクを入力とし、車速に相当するモーター5の回転速度を出力とする自動車モデルGvを有する。自動車モデルGvには簡易的なものから厳密なものまで種々考えられるが、この実施の形態では次式に示す簡易的な数式化モデルを採用する。
【数2】
Gv(s)=1/(Jv・s)
数式2において、Jvはモーター5の出力軸に換算したモーター5と自動車の慣性である。回転速度推定部23は、数式2に示す自動車モデルGvに対してトルク指令値T*と振動補償トルクThとの和TLを入力し、モーター5の回転速度推定値NSを演算により推定する。
【数3】
NS=TL・Gv(s)=TL/(Jv・s)
【0015】
振動補償トルク演算部24は、駆動系のねじれによる共振振動を抑制するための振動補償トルクThを演算する。自動車の駆動系は、図1に示すように、細い駆動軸7a、7bの両端に走行駆動源であるモーター5の慣性と自動車の慣性とが接続された共振系であり、自動車の発進時や追い越し加速時にモーター5が大きな駆動力を発生すると、駆動軸7a、7bにおける軸トルクが振動する。ところが、自動車の慣性はモーター5の慣性に対して非常に大きいので、共振振動にともなってモーター5の回転速度Nが振動しても車速はほとんど振動しない。このことから、自動車モデルGvを用いて演算したモーター回転速度推定値NSは、実際の車速に比例していると考えることができる。したがって、実際のモーター回転速度Nとモーター回転速度推定値NSとの速度差は、駆動系のねじれによる共振振動により発生していると見なすことができる。振動補償トルク演算部24は、モーター回転速度Nとモーター回転速度推定値NSとの速度差(NS−N)に所定のゲインK1を乗じて振動補償トルクThを演算する。
【数4】
Th=K1・(NS−N)
【0016】
位相・ゲイン調整部25は、車両コントローラー2のトルク指令値T*に加算する振動補償トルクThの位相とゲインを調整することによって、モーター電流制御系の応答遅れ起因したトルク指令値T*に対する実際のモータートルクの遅れを補償する。位相・ゲイン調整部25は、次式に示す進み遅れ要素の伝達特性を有する。
【数5】
Ga(s)=(1+T1・s)/(1+T2・s)
数式5において、T1、T2は時定数である。具体的には、数式5に示す進み遅れ要素と等価な次式により振動補償トルクThに対して位相とゲイン調整を行い、補正トルクTxを演算する。
【数6】
Tx=K2(Th−Tx1),
Tx1=Tx/(1+τ・s)
数式6において、K2はゲイン、τは時定数である。図2に位相・ゲイン調整部25の制御ブロック図を示す。
【0017】
図3(a)は位相・ゲイン調整部25のゲイン特性を示し、図3(b)は位相・ゲイン調整部25の位相特性を示す。位相・ゲイン調整部25では、図3(a)に示すように所定の周波数より高い波数領域におけるゲインを増加し、図3(b)に示すように所定の周波数付近の位相を進ませる。この所定の周波数がモーター電流制御系のカットオフ周波数近傍の値となるように上記数式6の時定数τを設定し、図3に示すような特性の位相・ゲイン調整を振動補償トルクThに対して施すことによって、振動補償トルクThの所定の周波数、すなわちモーター電流制御系のカットオフ周波数近傍の位相を進ませ、且つゲインを増加させることができる。
【0018】
加算器26は、車両コントローラー1のトルク指令値T*に位相・ゲイン調整後の振動補償トルクTxを加算して補正し、補正後のトルク指令値Trefを出力する。
【数7】
Tref=T*+Tx
トルク指令値T*に対して、所定の周波数より高い波数領域におけるゲインを増加させ、所定の周波数付近の位相を進ませた位相・ゲイン調整後の振動補償トルクTxを加算、補正することによって、図6に示すようなトルク指令値T*に対する実際のモータートルクのトルク減衰Kと位相のずれφを抑制することができる。これにより、モーター電流制御系のカットオフ周波数が抑制したい共振周波数に近い場合でも、実際のモータートルクが振動補償後のトルク指令値に追従し、充分な共振振動抑制効果が得られる。
【0019】
電流指令値演算部27は、補正後のトルク指令値Tref、バッテリー電圧Vbおよびモーター回転速度Nに基づいてモーター電流指令値I*(この実施の形態では3相交流電流指令値Iu*、Iv*、Iw*)を演算する。電流制御部28は、モーター電流指令値I*(Iu*、Iv*、Iw*)とモーター電流検出値Ifb(Iu、Iv、Iw)との偏差に対して例えばPI(比例積分)制御を施し、モーター電流検出値Ifbをその指令値I*に一致させるためのモーター電圧指令値V*(この実施の形態では3相交流電圧指令値Vu*、Vv*、Vw*)を演算する。
【0020】
図4は、モーターコントローラー2のモーター制御プログラムを示すフローチャートである。このフローチャートにより、一実施の形態の動作を整理して説明する。モーターコントローラー2は自動車のメインスイッチが投入されると、このモーター制御プログラムを繰り返し実行する。
【0021】
ステップ1において、回転センサー11のパルス信号に基づいてモーター回転速度Nを検出する。続くステップ2で、自動車モデルGvを用いて上記数式3によりモーター回転速度推定値NSを算出する。なお、このとき、数式3の振動補償トルクThには前回のモーター制御プログラム実行時に算出した値を用いて今回のモーター回転速度推定値NSを算出する。ステップ3では、上記数式4により実際のモーター回転速度Nとモーター回転速度推定値NSとの速度差に応じた振動補償トルクThを演算する。
【0022】
ステップ4において、振動補償トルクThに対して位相とゲイン調整を施し、所定周波数付近の位相を進ませるとともに、所定周波数より高い周波数領域のゲインを増加する。ステップ5で、位相とゲイン調整後の振動補償トルクTxをトルク指令値T*に加算して補正し、トルク指令値Trefを求める。ステップ6では、補正後のトルク指令値Tref、バッテリー電圧Vbおよびモーター回転速度Nに基づいてモーター電流指令値I*を演算する。そしてステップ7で、モーター電流指令値I*と実際のモーター電流Ifbとに基づいて電流制御を行い、モーター電圧指令値V*を演算、出力する。
【0023】
なお、上述した一実施の形態ではモーター電流制御系が一次遅れの系であると仮定して位相・ゲイン調整部25の特性を決定したが、モーター電流制御系が一次遅れ以外の応答遅れ特性の場合には、モーター電流制御系の応答遅れ特性を改善できるような位相・ゲイン調整部25の特性とすればよい。
【0024】
また、上述した一実施の形態ではモーターのみを走行駆動源とする電気自動車を例に上げて説明したが、内燃機関とモーターの両方を備え、常時または一時的にモーターのみの駆動力により走行するハイブリッド自動車に対しても本願発明を適用することができる。
【図面の簡単な説明】
【図1】 一実施の形態の構成を示す図である。
【図2】 位相・ゲイン調整部の詳細な構成を示す図である。
【図3】 位相・ゲイン調整部の特性を示す図である。
【図4】 一実施の形態のモーター制御プログラムを示すフローチャートである。
【図5】 モーター電流制御系を一次遅れの系と仮定した場合の周波数応答特性を示す図である。
【図6】 振動補償後のトルク指令値に対する実際のモータートルクのトルク減衰と位相ずれを示す図である。
【符号の説明】
1 車両コントローラー
2 モーターコントローラー
3 インバーター
4 バッテリー
5 モーター
6 変減速機
7a、7b 駆動軸
8a、8b 駆動輪
9 電圧センサー
10 電流センサー
11 回転センサー
21 回転速度検出部
22 加算器
23 回転速度推定部
24 振動補償トルク演算部
25 位相・ゲイン調整部
26 加算器
27 電流指令演算部
28 電流制御部
Claims (2)
- 自動車を走行駆動するモーターと、
自動車の駆動系の共振を抑制するための振動補償トルクを演算する振動補償トルク演算手段と、
前記振動補償トルクに対してモーター電流制御系の応答遅れを補償するために、モーター電流制御系のカットオフ周波数近傍において位相を進ませ、且つゲインを増加させる位相進み補償手段と、
自動車を走行駆動させるためのモータートルク指令値に、前記位相進み補償手段による位相進み補償後の振動補償トルクを加算して補正するトルク指令値補正手段と、
前記トルク指令値補正手段による補正後のモータートルク指令値に応じたモーター電流指令値を演算する電流指令値演算手段と、
前記モーターに流れる電流が前記モーター電流指令値に一致するように電流制御を行う電流制御手段とを備えることを特徴とする電気自動車の制御装置。 - 自動車を走行駆動するモーターと、
前記モーターの回転速度を検出する回転速度検出手段と、
モータートルクを入力としモーター回転速度を出力として制御対象の自動車の動作を模擬する自動車の数式化モデルを有し、前記数式化モデルによりモータートルク指令値に対するモーター回転速度推定値を演算する回転速度推定手段と、
前記モーター回転速度検出値と前記モーター回転速度推定値との差に応じた振動補償トルクを演算する補償トルク演算手段と、
前記振動補償トルクに対してモーター電流制御系の応答遅れを補償するために、モーター電流制御系のカットオフ周波数近傍において位相を進ませ、且つゲインを増加させる位相・ゲイン調整手段と、
前記位相・ゲイン調整手段による調整後の振動補償トルクを前記モータートルク指令値に加算する加算手段と、
前記加算手段による加算値に応じたモーター電流指令値を演算する電流指令値演算手段と、
モーター電流を検出する電流検出手段と、
前記モーター電流検出値が前記モーター電流指令値に一致するように電流制御を行う電流制御手段とを備えることを特徴とする電気自動車の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002011302A JP3831264B2 (ja) | 2002-01-21 | 2002-01-21 | 電気自動車の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002011302A JP3831264B2 (ja) | 2002-01-21 | 2002-01-21 | 電気自動車の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003219514A JP2003219514A (ja) | 2003-07-31 |
| JP3831264B2 true JP3831264B2 (ja) | 2006-10-11 |
Family
ID=27648809
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002011302A Expired - Fee Related JP3831264B2 (ja) | 2002-01-21 | 2002-01-21 | 電気自動車の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3831264B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104125895A (zh) * | 2012-02-15 | 2014-10-29 | 日产自动车株式会社 | 使用电动机的车辆的抑振控制装置以及抑振控制方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4736402B2 (ja) * | 2004-11-02 | 2011-07-27 | 日産自動車株式会社 | モータ組み込みサスペンション装置およびそれを備えた電動車両 |
| JP4148215B2 (ja) * | 2004-12-03 | 2008-09-10 | 日産自動車株式会社 | 電動モータ駆動車両の制振制御装置 |
| JP5037024B2 (ja) * | 2006-03-14 | 2012-09-26 | 株式会社小野測器 | モータ制御装置 |
| JP4933210B2 (ja) * | 2006-10-05 | 2012-05-16 | ヤンマー株式会社 | クローラ式走行装置 |
| JP5604996B2 (ja) * | 2010-06-07 | 2014-10-15 | 日産自動車株式会社 | 車体パネル強化構造 |
| JP5553162B2 (ja) * | 2010-09-29 | 2014-07-16 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP6364832B2 (ja) * | 2014-03-12 | 2018-08-01 | 日産自動車株式会社 | 車両用制振制御装置 |
| JP6541407B2 (ja) * | 2015-04-23 | 2019-07-10 | 株式会社小野測器 | モータ制御装置およびプログラム |
| WO2019215847A1 (ja) * | 2018-05-09 | 2019-11-14 | 日産自動車株式会社 | 電動機の制御方法及び電動機の制御装置 |
| US12043120B2 (en) * | 2020-09-14 | 2024-07-23 | Transportation Ip Holdings, Llc | Systems and methods for active damping of a platform of a vehicle |
| JP7779330B2 (ja) * | 2022-01-18 | 2025-12-03 | 日産自動車株式会社 | 電動車両制御方法及び電動車両制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3266931B2 (ja) * | 1991-10-15 | 2002-03-18 | 株式会社日立製作所 | モータの制御装置 |
| JP3114470B2 (ja) * | 1993-12-09 | 2000-12-04 | 株式会社日立製作所 | 自動車の制御装置 |
| JP3339246B2 (ja) * | 1994-04-04 | 2002-10-28 | 株式会社明電舎 | 低慣性化制御による2慣性共振系の振動抑制装置 |
| JPH11262186A (ja) * | 1998-03-09 | 1999-09-24 | Hitachi Ltd | 電力貯蔵システムの制御装置 |
| JP2000217209A (ja) * | 1999-01-22 | 2000-08-04 | Toyota Motor Corp | 電動機を駆動力源とした車両の制振装置 |
| JP3696025B2 (ja) * | 2000-02-08 | 2005-09-14 | 松下電器産業株式会社 | 位置制御装置 |
-
2002
- 2002-01-21 JP JP2002011302A patent/JP3831264B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104125895A (zh) * | 2012-02-15 | 2014-10-29 | 日产自动车株式会社 | 使用电动机的车辆的抑振控制装置以及抑振控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003219514A (ja) | 2003-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5900609B2 (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP6669249B2 (ja) | 電動車両の制御方法、及び、電動車両の制御装置 | |
| EP2815914A1 (en) | Vibration suppression control device for electric motor-driven vehicle and method for controlling vibration suppression | |
| CN109689422B (zh) | 车辆的控制方法和控制装置 | |
| JP3831264B2 (ja) | 電気自動車の制御装置 | |
| WO2018220805A1 (ja) | 電動車両の制御方法、及び、制御装置 | |
| US9621092B2 (en) | Induction motor control apparatus and induction motor control method | |
| JP2016172459A (ja) | ステアリング装置 | |
| JP4400389B2 (ja) | 駆動モータ制御装置 | |
| KR20190007089A (ko) | 하이브리드 차량의 제어 방법 및 하이브리드 차량의 제어 장치 | |
| JP4556460B2 (ja) | 車両用制振制御装置および車両用制振制御方法 | |
| JP4419625B2 (ja) | 車両用制振制御装置および車両用制振制御方法 | |
| JP2015074308A (ja) | 電動車両の発電制御装置 | |
| JP7107385B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP5900656B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP6728633B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP2006187090A (ja) | 発電機電力制御装置 | |
| WO2020194637A1 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP5406238B2 (ja) | 車両用モータ制御装置 | |
| JP7707855B2 (ja) | 電動車両の制御方法及び制御装置 | |
| JP2017225278A (ja) | 電動車両の制御方法、及び電動車両の制御装置 | |
| JP6686658B2 (ja) | 電動車両の制御方法、及び、電動車両の制御装置 | |
| KR20160098890A (ko) | 자동차의 전동식 파워 스티어링 시스템 및 방법 | |
| JP5511751B2 (ja) | 車両用モータ制御装置 | |
| JP3935039B2 (ja) | 速度指令制御部及び電動車輌の速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050315 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050502 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051206 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060713 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |