JP3880882B2 - 表面形状測定方法及びその装置 - Google Patents
表面形状測定方法及びその装置 Download PDFInfo
- Publication number
- JP3880882B2 JP3880882B2 JP2002136786A JP2002136786A JP3880882B2 JP 3880882 B2 JP3880882 B2 JP 3880882B2 JP 2002136786 A JP2002136786 A JP 2002136786A JP 2002136786 A JP2002136786 A JP 2002136786A JP 3880882 B2 JP3880882 B2 JP 3880882B2
- Authority
- JP
- Japan
- Prior art keywords
- moire
- fringe
- measured
- phase
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は表面形状測定方法及びその装置に関し、特にレンズ等の部品表面の欠陥検査やロボットビジョンに用いられる三次元的な表面形状測定方法に関する。
【0002】
【従来の技術】
三次元測定法の一つの手法としてモアレ法が挙げられる。このモアレ法には、格子投影型と実体格子型があり、様々な分野において広く利用されている。格子投影型のモアレ法とは、図17に示すように、投影用と観察用とに、それぞれ小さな格子G1,G2を配置し、投影用の格子G1をレンズL1により物体に投影し、物体形状に応じて変形した格子線をレンズL2を通じてもう一つの観察用の格子G2上に結像させ、縞等高線を基準面から所定距離のところに生じさせるようにしたものである。次に、実体格子型のモアレ法とは、図18に示すように、基準面に一つの格子Gを設置し、レンズL1の位置に点光源Sを、レンズL2の位置に観察眼eを置いて、格子Gの点光源Sによる影を物体上に落し、物体形状に応じて変形した格子Gの影を形成させてこれを格子Gを通して観察眼eから観察することにより、この格子Gと変形した格子の影とによって生じるモアレ縞を観測する方法をいう。
【0003】
例えば特開平6−160046号公報(以下従来例1と称す)では格子投影型のモアレ法により、長尺材の歪みを検出している。また、得られたモアレ縞から物体の3次元形状を計測することも可能である。図19において、光源S1及び観察点S2と格子面までの距離をl、格子のピッチをS、光源と観察点との距離をdとする。同一平面内にある格子G1とG2はいずれもピッチSをもつが、格子は面内で互いにεだけずれている(格子ピッチの位相でいえば2πε/S)ものとすると、強度がゆっくり変化するモアレ縞の項は、
【0004】
【数1】

と表せられる。形成されるモアレ縞(等高線)は、格子面を基準(0次)として、格子面から離れるに従い、順に1次、2次とカウントされる次数を持つ。そこで縞次数Nのモアレ縞をcoS2πNと置くことによって得られる。その結果、第N次のモアレ等高線は基準面からhNだけ離れた次の位置、
【0006】
【数2】
に形成されることになる。これは位置の座標xを含んでおらず、Nによって(xにかかわりなく)定める固有の値となっている。すなわち、等高線が形成されていることを示す。
【0008】
図20のような構成をとった場合、S1を点光源として、S2の位置に観察点をおき、また1枚の連続した(したがってε=0となる)格子を配したものに相当する(実体格子型)。ε=0であるので(2)式から、
【0009】
【数3】
が成り立つ。ただし、等高線といいながら厳密には、その間隔ΔhN=hN+1−hNは一定ではなく、次数Nによって異なってしまうが、一般的にはd≫NSとみなして、Δh=Sl/dと近似できることが多い。このような原理に基づいて物体の3次元形状を計算できる。
【0011】
更に、高精度な計算方法として、位相シフト法を応用した例が報告されている。まず、位相シフト法の原理について説明する。図21に示すように、位相変調された縞画像Iは、
I=I(θ)=a(x、y)+b(x、y)coS(Φ(x、y)+θ))
(ただし、a:バイアス、b:振幅、θ:操作可能な位相、Φ:高さに相当する位相値である。)
と表せる。ここで求めたいのは各点(x、y)における位相Φ(x、y)である。バイアスや振幅は、表面の反射率や汚れなどで変化する未知数成分なので、位相θを0、π/2、πと変化させた3つの縞画像I1、I2、I3は、
I1= I(0)=a(x、y)+b(x、y)coS(Φ(x、y)+θ))
I2=I(π/2)=a(x、y)−b(x、y)Sin(Φ(x、y)+θ))
I3= I(π)=a(x、y)−b(x、y)coS(Φ(x、y)+θ))
を生成する。その結果、
【0012】
【数4】
となる。この(4)式により位相を算出すれば反射率や汚れ成分を除去して、各点の位相Φ(x、y)を求めることができる。
【0014】
また、特許第2,887,517号明細書(以下従来例2と称す)では、格子面の垂直移動と光源又は観察点の水平移動を、同時に行うことにより、各次数の縞の位相がほぼ揃った状態で測定対象に対する縞位相をシフトさせ、複数枚の縞画像を位相シフト法の原理に基いて処理することにより高い計測精度を実現させている。
【0015】
【発明が解決しようとする課題】
しかし、上記従来例1の方法では対象物を直観的に把握することはできるが、凹凸の判定がし難い、急激な形状変化があった場合、モアレ縞が密になり区別できなくなる等の問題が生じる。あるいは被測定物自体に模様や色の違いがあった場合、色情報とモアレ縞による強度情報を分離できなくなるといった問題も生じる。
【0016】
また、従来例2によれば、これらの形状演算において求められる位相はπの間に折りたたまれて計算される。もし物体形状に段差のような急激な形状変化が存在した場合、モアレ縞の位相π以上変化しまい、その飛びがπの何倍なのか特定できないため正確な形状を計算することができない。
【0017】
本発明はこれらの問題点を解決するためのものであり、被測定物自体の模様や汚れに左右されずに段差等の急激な形状変化が存在する被測定物の表面形状を測定できる表面形状測定方法及びその装置を提供することを目的とする。
【0018】
【課題を解決するための手段】
前記問題点を解決するために、平面格子の影を光源から出た光によって、被測定物表面上に投影し、影を格子又は当該格子と別の格子を通して観察点で得て、平面格子の影によって生じるモアレ縞を利用して被測定物の表面形状を測定する、本発明の表面形状測定方法によれば、モアレ縞の位相を走査し、その走査時に生じるモアレ縞強度変化の周期を測定し、測定したモアレ縞強度変化の周期に基づいて被測定物の表面形状を測定する。よって、モアレ縞強度変化の周期から高さを測定するので、模様や汚れ等があっても影響なく被測定物の表面形状を測定できる。
【0019】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査による被測定物上のモアレ縞強度変化の周期を演算するモアレ縞強度変化周期演算手段と、モアレ縞強度変化の周期の違いに基づいて被測定物の形状データを算出する形状演算手段と有することに特徴がある。
【0020】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を用いて被測定物の表面形状を測定することにより、形状データの算出を高速化できる。
【0021】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査による縞強度変化が1周期分変化するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物の形状データを算出する形状演算手段とを有することに特徴がある。よって、形状データの算出を高速化できる。
【0022】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を用いて被測定物のモアレ縞次数を決定し、決定したモアレ縞次数を基に被測定物体上のモアレ縞の位相を算出し、被測定物の表面形状を測定することにより、測定精度を向上させることができる。
【0023】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査によるモアレ縞強度が1周期するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物のモアレ縞次数を決定する縞次数決定手段と、決定したモアレ縞次数を用いて被測定物体上のモアレ縞位相を演算する位相演算手段と、モアレ縞位相に基づいて被測定物の形状データを算出する形状演算手段とを有すること特徴がある。よって、測定精度を向上させることができる。
【0024】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量を測定し、さらにモアレ縞強度が少なくとも2周期以上変化するのに要したモアレ縞走査量を測定した後、それらの測定量から被測定物体上のモアレ縞次数と位相を算出し、被測定物の表面形状を測定することにより、予め対応表を作成しておかなくてもモアレ縞次数と位相を算出することができる。
【0025】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞強度の位相を走査させるためのモアレ縞位相走査手段と、モアレ縞位相走査によりモアレ縞強度変化が1周期及び少なくとも2周期以上変化に要したモアレ縞走査量を算出する縞強度変化周期演算手段と、演算結果から被測定物体上のモアレ縞次数及び位相を演算する縞次数−位相演算手段と、モアレ縞次数及び位相に基づいて被測定物の形状データを算出する形状演算手段とを有することに特徴がある。よって、予め対応表を作成しておかなくてもモアレ縞次数と位相を算出することができる。
【0026】
更に、モアレ縞位相走査手段が、光源、格子パターン及び光電変換素子を含む光学系全体を格子パターンと垂直方向に移動させるための光学系移動手段を有することにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0027】
また、モアレ縞位相走査手段が、被測定物体を格子パターンと垂直方向に移動させるための被測定物移動手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0028】
更に、モアレ縞位相走査手段が、格子パターンを移動させるための格子パターン移動手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0029】
また、モアレ縞位相走査手段が、格子パターンのピッチを変化させるための格子パターンピッチ変更手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0030】
更に、モアレ縞位相走査手段が、光源と光電変換素子間の距離を変化させるための光源−光電素子間距離変更手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0031】
【発明の実施の形態】
本発明の表面形状測定方法は、モアレ縞の位相を走査し、その走査時に生じるモアレ縞強度変化の周期を測定し、測定したモアレ縞強度変化の周期に基づいて被測定物の表面形状を測定する。
【0032】
【実施例】
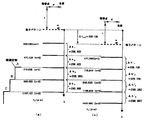
図1は本発明の第1の実施例に係る表面形状測定方法の原理を示す概略図である。同図において、上記(3)式や図20で示したように、モアレ光学系では縞次数Nにより縞間隔Δhnが異なる。例えばS=83.3μm(12本/mm)、L=200mm、d=70mmとした場合、図1の(a)のような位置にモアレ縞等高線が形成される。ここで、モアレ次数n=2、3、4の位置に段差ABCがある被測定物を考える。図1の(a)の状態では、ABC面上には明るいモアレ縞が形成されていることになる。次に、光源、観察点、格子パターンの相対位置関係は維持したまま、モアレ光学系全体を図1の(b)に示すように、図中下方向にΔh2(=239.423μm)だけ移動させるとする。その結果、図1の(b)に示すような位置にモアレ縞等高線がシフトする。光学系移動中のABC各段差面上でのモアレ縞強度変化を模式的に図2に示す。図2ではΔh2(=239.423μm)を50分割して移動させ、各移動時におけるモアレ縞強度を測定した場合を想定して表している。B面上ではモアレ縞強度がちょうど1周期する。一方A面上では、光学系をΔh2(=239.423μm)移動させた場合、モアレ縞強度は1周期以上変化している。逆にC面上では、まだ1周期分の強度変化を示していない。これは縞次数Nにより縞間隔Δhnが異なるためである。このように、モアレ縞の位置、言いかえればモアレ縞の位相を意図的に変化させた場合、その時生じるモアレ縞強度変化の周期と物体の高さを1:1に対応させることが可能である。光学系を移動させる代わりに、被測定物を移動させても同様である。つまり、モアレ縞の位相を変化させるには、モアレ光学系と被測定物との相対距離を変化させればよい。あるいは、モアレ光学系のパラメータ(d,S,l)のいずれかを変化させてもモアレ縞の位相を変化させることが可能である。よって、モアレ光学系のパラメータ(d,S,l)いずれかを変化させて、測定したい個所でモアレ縞の強度を測定した場合、そのモアレ縞強度が1周期するのに要するモアレ光学系パラメータの変化量と物体の高さを1:1に対応させることが可能である。
【0033】
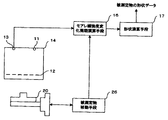
図3は第1の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。表面形状測定装置100は、光源11、格子パターン12及びモアレ縞の強度を観測するための光電変換素子13を有するモアレ光学系14と、例えばモアレ光学系14と被測定物20を相対的に図中上下に移動させてモアレ光学系14と被測定物20の相対距離を変化させてモアレ縞の位相を走査するモアレ縞位相走査手段15と、モアレ縞における変化する周期を演算するモアレ縞強度変化周期演算手段16と、演算された周期に基づいて被測定物の形状を演算する形状演算手段17とを含んで構成されている。ここでは、格子パターン12を1枚だけ用いる実体格子型モアレ光学系を例に取ったが、格子投影型のモアレ光学系でもよい。そして、このような構成を有する表面形状測定装置100によれば、モアレ縞位相走査手段15によりモアレ光学系14と被測定物20の相対距離を変化させてモアレ縞強度の位相を走査させながら、一定の間隔で被測定物20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られるので、モアレ縞強度変化周期演算手段16でモアレ縞強度変化が1周期変化する相対距離の変化量を演算する。更に、その変化量の違いから形状測定手段17を用いて被測定物20の形状データに変換する。あるいは、モアレ縞位相走査手段15によりモアレ光学系14内のパラメータ(d,S,l)のいずれかを変化させてモアレ縞の位相を変化させた場合は、縞変化周期演算手段16でモアレ縞強度変化が1周期変化するパラメータの変化量を演算する。更に、その変化量の違いから形状測定手段17を用いて被測定物の形状データに変換する。
図4は本発明の第2の実施例に係る表面形状測定方法の原理を示す概略図である。ここでは、凸状の被測定物のD面の高さを測定する方法について説明する。同図において、D面は初期設定において縞次数nとn+1の間に存在し、次数nからの位相をφとすると、D面の初期位置は、
【0034】
【数5】
と表される。もともと初期設定において次数n−1とnの間の位相φ位置にあった縞がモアレ光学系の移動により、D面に移動したときにD面上の縞が1周期する。ここでモアレ光学系の移動により縞強度が1周期したときの、求めたい高さ方向におけるモアレ縞の移動量を図4のようにF1(n,φ)とすると下記の(6)式が成り立つ。この場合、モアレ光学系の移動量とモアレ縞の移動量は同じである。
【0036】
【数6】
そして、n=1,2,…、φを必要な分解能で設定して、被測定物体上のあらゆる高さについてF1(n,φ)を算出して、(縞強度が1周期変化するモアレ光学系の移動量)−(高さ)の関係を示す対応表を作成しておく。hnやΔhnはモアレ光学系のパラメータ(d,S,l)と次数nから決定できる。測定の際は、縞強度が1周期変化するモアレ光学系の移動量(測定値)を、対応表と比較し最も近い高さを、その測定個所の形状データとする。被測定物を移動させてモアレ縞位相を走査した場合も同じ対応表が使える。つまり、モアレ光学系と被測定物の相対距離を変化させることによりモアレ縞を走査した場合は同じ対応表が使える。あるいは、モアレ光学系パラメータを変化させた場合は、その変化量が求めたい高さ方向におけるモアレ縞の移動量F1(n,φ)と同じとはならない。そのためF1(n,φ)を測定値から直接得られないが、ある変換式を用いて関連付けることが可能である。その場合は、縞強度が1周期変化するモアレ光学系パラメータの変化量を、変換式を用いて、求めたい高さ方向におけるモアレ縞移動量F1(n,φ)に変換して、先の対応表から縞次数を決定する。あるいはその変換式を用いて、予め(縞強度が1周期変化するモアレ光学系パラメータの変化量)−(高さ)の関係を示す対応表を予め作成しておいてもよい。
【0038】
図5は第2の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。同図において、図3と同じ参照符号は同じ構成要素を示す。異なる構成要素として、(縞強度が1周期変化する相対距離の変化量)−(高さ)の関係を示す対応表を格納している対応表記憶手段18を有している。ここでも格子パターン12を1枚だけ用いる実体格子型モアレ光学系を例に取ったが、格子投影型のモアレ光学系でもよい。モアレ縞位相走査手段15はモアレ光学系14と被測定物20の相対距離を変化させることにより、モアレ縞強度の位相を走査させる。そして、モアレ縞強度の位相を走査させながら、一定の間隔で被測定物体20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られる。そこで、モアレ縞強度変化周期演算手段16でモアレ縞強度変化が1周期分変化する相対距離の変化量を演算する。そして、対応表記憶手段18に記憶しておいた(縞強度が1周期変化する相対距離の変化量)−(高さ)の関係を示す対応表から被測定物20上の形状データを形状演算手段17で形状データを求める。あるいはモアレ縞位相走査手段15によりモアレ光学系14のパラメータ(d,S,l)を変化させてモアレ縞位相を走査させた場合は、モアレ縞強度変化周期演算手段16でモアレ縞強度変化が1周期分変化するモアレ光学系14のパラメータ(d,S,l)の変化量を演算する。そして、(縞強度が1周期変化するモアレ光学系のパラメータ(d,S,l)の変化量)−(高さ)の関係を示す対応表から被測定物20上の形状データを形状演算手段17で形状データを求める。
【0039】
次に、本発明の第3の実施例に係る表面形状測定方法について説明すると、モアレ光学系を移動させて、モアレ縞の位相を走査させた場合、(6)式をΔhn=hn + 1−hnを用いて整理すると、
【0040】
【数7】
となる。ここでF1(n,φ)は求めたい高さ方向におけるモアレ縞1周期分の移動量(図4参照)であり、この場合、モアレ縞強度が1周期するのに要するモアレ光学系の移動量と同じであり測定値として得られる。また、hnは(3)式を用いてモアレ光学系のパラメータ(d,S,l)から算出できるので、縞次数nがわかれば位相φが分りD面の高さに換算できる。縞次数nの特定は予め対応表を作成しておけば容易に特定できる。測定面が縞次数nとn+1の間にあった場合、F1(n,φ)はΔhn−1以上Δhn以下になる。Δhnはモアレ光学系のパラメータ(d,S,l)から予めわかるので、(縞強度が1周期変化するモアレ光学系の移動量)−(縞次数)の関係を示す対応表を作っておけば、測定値であるF1(n,φ)からその面がどの次数の間にあったか特定できる。縞次数nが特定できれば(7)式及び測定値F1(n,φ)から位相φを算出し、高さに変換すれば良い。光学系の代わりに被測定物を移動させた場合も同じである。あるいは、モアレ光学系パラメータを変化させた場合、その変化量が求めたい高さ方向におけるモアレ縞の移動量F1(n,φ)と同じとはならない。そのためF1(n,φ)を測定値から直接得られないが、ある変換式を用いて関連付けることが可能である。その場合は、縞強度が1周期変化するモアレ光学系パラメータの変化量を、変換式を用いて、求めたい高さ方向におけるモアレ縞移動量F1(n,φ)に変換して、先の対応表から縞次数を決定する。あるいはその変換式を用いて、予め(縞強度が1周期変化するモアレ光学系パラメータの変化量)−(縞次数)の関係を示す対応表を予め作成しておいてもよい。
【0042】
図6は第3の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。同図において、図5と同じ参照符号は同じ構成要素を示す。異なる構成要素として、予め作成しておいた(縞強度が1周期変化する相対距離の変化量)−(縞次数)の関係を示す対応表を記憶する対応表記憶手段19と、当該対応表から被測定物上のモアレ縞次数を決定する縞次数決定手段21と、位相演算手段22とを有する。モアレ縞を発生させるための光源11及び格子パターン12、モアレ縞の強度を観測するための光電変換素子13によりモアレ光学系14が形成される。ここでも格子パターン12を1枚だけ用いる実体格子型モアレ光学系を例に取ったが、格子投影型のモアレ光学系でもよい。モアレ縞位相走査手段15は、モアレ光学系14と被測定物20の相対距離を変化させることにより、モアレ縞強度の位相を走査させる。そして、モアレ縞強度の位相を走査させながら、一定の間隔で被測定物体20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られる。そこで、モアレ縞強度変化周期演算手段16でモアレ縞強度変化が1周期分変化する相対距離の変化量、つまり縞強度が1周期変化する縞の移動量をF1(n,φ)を演算する。更に、その結果を受け予め作成しておいた(縞強度が1周期変化する相対距離の変化量)−(縞次数)の関係を示す対応表から被測定物20上のモアレ縞次数を縞次数決定手段21で決定し、その決定した縞次数を用いて被測定物20上のモアレ縞位相を位相演算手段22で演算し、形状演算手段17で形状データに変換する。あるいはモアレ縞位相走査手段15によりモアレ光学系14のパラメータ(d,S,l)を変化させてモアレ縞位相を走査させた場合は、モアレ縞強度変化周期演算手段16でモアレ縞強度変化が1周期分変化するモアレ光学系14のパラメータ(d,S,l)の変化量を演算する。そして、予め作成して対応表記憶手段21に記憶しておいた(縞強度が1周期変化するモアレ光学系のパラメータ(d,S,l)の変化量)−(縞次数)の関係を示す対応表から被測定物20上の形状データを形状演算手段17で形状データを求める。
【0043】
次に、本発明の第4の実施例に係る表面形状測定方法について説明する。第1の実施例で示した縞が1周期変化する縞の移動量F1(n,φ)に続き、図7に示すように、縞が2周期変化する縞の移動量F2(n,φ)を求める。モアレ光学系を移動させてモアレ縞の位相を走査させた場合、F1(n,φ)、F2(n,φ)はモアレ縞強度が1周期あるいは2周期変化するのに要するモアレ光学系の移動量と同じであり測定値として得られる。この場合、
【0044】
【数8】
と表せる。Δhn=hn + 1−hnを用いて整理すると、
【0046】
【数9】
F1(n,φ)を表す(7)式とこの(9)式において、未知数は縞次数nと位相φであるので、2つの方程式を解けば解が得られる。次数nと位相φが求められれば、被測定物の高さに換算できる。ここでは2周期分の移動量から方程式を解いたが更に多くの周期を表す移動量から縞次数nと位相φを解くことにより精度を向上させることも可能である。あるいは、モアレ光学系パラメータを変化させた場合、その変化量が求めたい高さ方向におけるモアレ縞の移動量F1(n,φ)、F2(n,φ)と同じとはならない。そのためF1(n,φ)、F2(n,φ)を測定値から直接得られないが、ある変換式を用いて関連付けることが可能である。
【0048】
図8は第4の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。同図において、図6と同じ参照符号は同じ構成要素を示す。異なる構成要素として、縞強度が1周期変化する縞の移動量F1(n,φ)及び縞強度が2周期変化する縞の移動量F2(n,φ)を演算するモアレ縞強度変化周期演算手段23と、該モアレ縞強度変化周期演算手段23による演算結果から上記(7)式及び(9)式を演算する縞次数−位相演算手段24とを有している。ここでも格子パターン12を1枚だけ用いる実体格子型モアレ光学系を例に取ったが、格子投影型のモアレ光学系でもよい。モアレ縞位相走査手段15はモアレ光学系14と被測定物20の相対距離を変化させることにより、モアレ縞強度の位相を走査させる。そして、モアレ縞強度の位相を走査させながら、一定の間隔で被測定物20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られる。そこで、モアレ縞強度変化周期演算手段23でモアレ縞強度変化が1周期分変化する相対距離の変化量、つまり縞強度が1周期変化する縞の移動量F1(n,φ)及びモアレ縞強度変化が2周期分変化する相対距離の変化量、つまり縞強度が2周期変化する縞の移動量F2(n,φ)を演算する。更に、その結果から縞次数−位相演算手段24で(7),(9)式の方程式を解くことにより被測定物20上のモアレ縞次数と位相を算出し、さらに形状演算手段17で形状データに変換する。あるいはモアレ縞位相走査手段15によりモアレ光学系のパラメータ(d,S,l)を変化させてモアレ縞位相を走査させた場合は、モアレ縞強度変化周期演算手段23でモアレ縞強度変化が1周期分変化するモアレ光学系14のパラメータ(d,S,l)の変化量をモアレ縞の移動量F1(n,φ)に換算し、続いてモアレ縞強度変化が2周期分変化するモアレ光学系14のパラメータ(d,S,l)の変化量をモアレ縞の移動量F2(n,φ)に換算する。更に、その結果から縞次数−位相演算手段24で(7),(9)式の方程式を解くことにより被測定物20上のモアレ縞次数と位相を算出し、さらに形状演算手段17で形状データに変換する。
【0049】
ここで、モアレ縞の位相を走査するためにモアレ光学系全体を移動させる実施例について説明する。本実施例の構成を示す図9に示すように、光学系移動手段25を用いて光学系全体を移動させることによりモアレ縞強度の位相を走査させ、一定の間隔で被測定物20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られるので、モアレ縞強度変化周期演算手段16でモアレ縞強度変化の周期を演算する。さらにその周期の違いから形状測定手段17を用いて被測定物20の形状データに変換する。
【0050】
また、モアレ縞の位相を走査するために被測定物を移動させる実施例について説明する。本実施例の構成を示す図10に示すように、被測定物移動手段26を用いて被測定物20を移動させることによりモアレ縞強度の位相を走査させ、一定の間隔で被測定物20上のモアレ縞強度を光電変換素子13で測定する。その結果、図2のような信号が得られる。この場合、図2の横軸は被測定物20の移動量である。この信号から、モアレ縞強度変化周期演算手段16でモアレ縞強度変化の周期を演算する。さらにその周期の違いから形状測定手段17を用いて被測定物20の形状データに変換する。
【0051】
次に、モアレ縞の位相を変化させるために格子パターンの位置を光軸方向にΔlだけ変化させる実施例を図11に示す。移動前のn+1次のモアレ縞等高線は上記(3)式から
【0052】
【数10】
となる。ただし、図11において、光源と観察点は格子から同距離にあり、光源と観察点の間の距離をd、格子と観察点、光源の間の距離をl、格子のピッチをS、格子の移動量をΔlとする。
【0054】
次に、格子パターンを移動させてモアレ縞をシフトさせることを考えると、シフト後の第n次の縞までの距離hn'は、
【0055】
【数11】
となる。従って、図11に示すように格子移動前の第n次と第n+1次のモアレ縞間の位相Φnの位置に、格子移動後の第n次のモアレ縞があると仮定すると、
【0057】
【数12】
が成立する。この(12)式に(10),(11)式を代入し整理すると、
【0059】
【数13】
を得る。この(13)式により格子移動量Δlと位相シフト量Φnの関係が明らかになった。ここで、S=83.3μm、l=200mm、d=70mm、格子移動前の縞次数n=3の縞を正確に2πシフトさせることを考える。つまり、n=3、Φ3=2πとする。以上のパラメータを(13)式に代入すると、Δln=3=239.138μmとなる。このΔlによる格子移動前後のモアレ縞等高線の位置を図12の(b)に示す。また、格子移動前の縞次数n=4の縞を正確に2πシフトさせるとするとn=4、Φ4=2πとし(13)式に代入すると、Δln=4=239.425μmとなる。このように物体の高さにより縞強度が1周期する格子パターン移動量Δlが異なる。
【0061】
次に、モアレ次数n=3、4、5の位置に段差ABCがある物体を考える。左側の状態では、ABC面上には明るいモアレ縞が形成されていることになる。次に、格子パターンをΔln=3(=239.138μm)だけ移動させるとする。その結果、図12の(a)のような位置にモアレ縞等高線がシフトする。格子移動中のABC各段差面上でのモアレ縞強度変化を模式的に図13に示す。ここではΔln=3を50分割して移動させ、各移動時におけるモアレ縞強度を測定した場合を想定して表している。B面上ではモアレ縞強度がちょうど1周期する。一方A面上では、格子パターンをΔln=3移動させた場合、モアレ縞強度はまだ1周期していない。逆にC面上では、1周期分以上の強度変化を示す。このように、格子パターンの位置を変化させ、モアレ縞の位相を意図的に変化させる場合、その時生じるモアレ縞強度変化の周期と物体の高さを1:1に対応させることが可能である。n=1,2,…、φを必要な分解能で設定して、縞1周期の変化を示す格子移動量Δl1(n,φ)と物体高さの関係を示す対応表を作成しておけば、容易に形状データが得られる。第2の実施例ではΔl1(n,φ)を、求めたい高さ方向のモアレ縞の移動量F1(n,φ)に換算してから対応表を使用する場合を説明したが、(縞1周期の変化を示す格子の移動量Δl1(n,φ))−(高さ)の関係を示す対応表を直接作成する方法に関して図14を用いて補足する。所定の位置から格子パターンをΔl1(n,φ)だけ移動させたととき、D面上の縞強度が1周期したとする。D面が格子移動前にn次とn+1次の間の位相φの縞上に存在したとする。このとき図14より、
【0062】
【数14】
と表せる。hn、Δhn、h'n - 1、Δh'n - 1はモアレ光学系のパラメータ(S,l,d)及び測定値Δl1(n,φ)を用いて表せる。よって任意の縞次数nとその間の位相φに対して、縞強度が1周期する格子パターン移動量Δl1(n,φ)を計算で求めることができる。n=1,2,…、φを必要な分解能で設定して、被測定物上のあらゆる高さについてΔl1を算出しておく。測定の際は、測定値であるΔ1l(n,φ)を、対応表と比較し最も近い高さを、その測定個所の形状データとする。また、先にも説明したように縞次数によりΔl1(n,φ)は異なるので、第2の実施例で示したように先ず被測定物体が存在する縞次数をまず特定し、そのあとにその縞次数と測定したΔl1(n,φ)を(14)式の等式に代入して位相φを求めることも可能である。更に、第3の実施例のように、縞強度が1周期変化するΔl1(n,φ)及び縞強度が2周期変化するΔl2(n,φ)を求めておき、連立方程式から縞次数nと位相φを算出しても良い。装置構成としては図5、図6、図8のモアレ縞位相走査手段15に、格子パターンを移動可能な機構を用いることになる。
【0064】
次に、図15に示すように、位相をシフトさせるために格子パターンのピッチをΔSだけ変化させることも可能である。変化前のn+1次のモアレ縞等高線は上記(3)式から
【0065】
【数15】
となる。ただし、図15において、光源と観察点は格子から同距離にあり、光源と観察点の間の距離をd、格子と観察点、光源の間の距離をl、格子のピッチをS、格子パターンのピッチ変化量をΔSとする。
【0067】
次に、格子パターンピッチを変化させてモアレ縞をシフトさせる実施例について説明すると、シフト後の第n次の縞までの距離hn'は、
【0068】
【数16】
となる。従って、図14に示すように格子パターンピッチ変化前の第n次と第n+1次のモアレ縞間の位相Φnの位置に、格子パターンピッチ変化後の第n次のモアレ縞があると仮定すると、
【0070】
【数17】
が成立する。この(17)式に(15),(16)式を代入し整理すると、
【0072】
【数18】
を得る。この(18)式により格子パターンのピッチ変化量ΔSと位相シフト量Φnの関係が明らかになった。ここで、S=83.3μm(12本/mm)、l=200mm、d=70mm、格子移動前の縞次数n=3の縞を正確に2πシフトさせることを考える。つまり、n=3、Φ3=2πとする。以上のパラメータを(17)式に代入すると、ΔS=27.8μmとなる。このΔSによる格子移動前後のモアレ縞等高線の位置を図16に示す。このようにモアレ縞の位相を走査させることが可能である。格子に液晶などを用いてピッチSを変化させながら測定を行うといった構成が考えられる。
【0074】
また、上記式(3)からわかるように、光源と観察点との距離dを変化させることによってもモアレ縞の位相を走査させることが可能である。そこで、図5、図6、図8のモアレ縞位相走査手段に、距離dを変化させられる機構を用いる。あるいは距離dが異なる光源を多数設けて切り替えながら測定することも可能である。距離dを変えることによりモアレ縞強度の位相を走査させ、一定の間隔で被測定物上のモアレ縞強度を光電変換素子で測定する。その結果、図2のような信号が得られるので、第1〜第4の実施例の表面形状測定方法で高さを測定できる。
【0075】
なお、本発明は上記実施例に限定されるものではなく、特許請求の範囲内の記載であれば多種の変形や置換可能であることは言うまでもない。
【0076】
【発明の効果】
以上説明したように、平面格子の影を光源から出た光によって、被測定物表面上に投影し、影を格子又は当該格子と別の格子を通して観察点で得て、平面格子の影によって生じるモアレ縞を利用して被測定物の表面形状を測定する、本発明の表面形状測定方法によれば、モアレ縞の位相を走査し、その走査時に生じるモアレ縞強度変化の周期を測定し、測定したモアレ縞強度変化の周期に基づいて被測定物の表面形状を測定する。よって、モアレ縞強度変化の周期から高さを測定するので、模様や汚れ等があっても影響なく被測定物の表面形状を測定できる。
【0077】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査による被測定物上のモアレ縞強度変化の周期を演算するモアレ縞強度変化周期演算手段と、モアレ縞強度変化の周期の違いに基づいて被測定物の形状データを算出する形状演算手段と有することに特徴がある。
【0078】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を用いて被測定物の表面形状を測定することにより、形状データの算出を高速化できる。
【0079】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査による縞強度変化が1周期分変化するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物の形状データを算出する形状演算手段とを有することに特徴がある。よって、形状データの算出を高速化できる。
【0080】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を用いて被測定物のモアレ縞次数を決定し、決定したモアレ縞次数を基に被測定物体上のモアレ縞の位相を算出し、被測定物の表面形状を測定することにより、測定精度を向上させることができる。
【0081】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査によるモアレ縞強度が1周期するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物のモアレ縞次数を決定する縞次数決定手段と、決定したモアレ縞次数を用いて被測定物体上のモアレ縞位相を演算する位相演算手段と、モアレ縞位相に基づいて被測定物の形状データを算出する形状演算手段とを有すること特徴がある。よって、測定精度を向上させることができる。
【0082】
更に、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量を測定し、さらにモアレ縞強度が少なくとも2周期以上変化するのに要したモアレ縞走査量を測定した後、それらの測定量から被測定物体上のモアレ縞次数と位相を算出し、被測定物の表面形状を測定することにより、予め対応表を作成しておかなくてもモアレ縞次数と位相を算出することができる。
【0083】
また、別の発明としての表面形状測定装置は、モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞強度の位相を走査させるためのモアレ縞位相走査手段と、モアレ縞位相走査によりモアレ縞強度変化が1周期及び少なくとも2周期以上変化に要したモアレ縞走査量を算出する縞強度変化周期演算手段と、演算結果から被測定物体上のモアレ縞次数及び位相を演算する縞次数−位相演算手段と、モアレ縞次数及び位相に基づいて被測定物の形状データを算出する形状演算手段とを有することに特徴がある。よって、予め対応表を作成しておかなくてもモアレ縞次数と位相を算出することができる。
【0084】
更に、モアレ縞位相走査手段が、光源、格子パターン及び光電変換素子を含む光学系全体を格子パターンと垂直方向に移動させるための光学系移動手段を有することにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0085】
また、モアレ縞位相走査手段が、被測定物体を格子パターンと垂直方向に移動させるための被測定物移動手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0086】
更に、モアレ縞位相走査手段が、格子パターンを移動させるための格子パターン移動手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0087】
また、モアレ縞位相走査手段が、格子パターンのピッチを変化させるための格子パターンピッチ変更手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【0088】
更に、モアレ縞位相走査手段が、光源と光電変換素子間の距離を変化させるための光源−光電素子間距離変更手段を有していることにより、モアレ縞の位相を走査させることができ、モアレ縞強度変化の周期から三次元形状測定が可能となる。
【図面の簡単な説明】
【図1】本発明の第1の実施例に係る表面形状測定方法の原理を示す概略図である。
【図2】光学系移動中のABC各段差面上でのモアレ縞強度変化を示す図である。
【図3】第1の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。
【図4】本発明の第2の実施例に係る表面形状測定方法の原理を示す概略図である。
【図5】第2の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。
【図6】本発明の第3の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。
【図7】本発明の第4の実施例に係る表面形状測定方法の原理を示す概略図である。
【図8】第4の実施例の表面形状測定方法を実現する表面形状測定装置の構成を示すブロック図である。
【図9】モアレ光学系全体を移動させる実施例の構成を示すブロック図である。
【図10】被測定物を移動させる実施例の構成を示すブロック図である。
【図11】格子パターンの位置を光軸方向に変化させる実施例の構成を示す図である。
【図12】格子移動前後のモアレ縞等高線の位置を示す図である。
【図13】格子移動中のABC各段差面上でのモアレ縞強度変化を示す図である。
【図14】対応表を直接作成する様子を示す図である。
【図15】格子パターンのピッチを変化させた様子を示す図である。
【図16】格子移動前後のモアレ縞等高線の位置を示す図である。
【図17】格子投影型のモアレ法を説明する図である。
【図18】実体格子型のモアレ法を説明する図である。
【図19】格子投影型のモアレ法により長尺材の歪みを検出する様子を示す図である。
【図20】格子投影型のモアレ法により長尺材の歪みを検出する別の様子を示す図である。
【図21】位相変調されたモアレ縞画像を示す図である。
【符号の説明】
11;光源、12;格子パターン、13;光電変換素子、
14;モアレ光学系、15;モアレ縞位相走査手段、
16,23;モアレ縞強度変化周期演算手段、17;形状演算手段、
18,19;対応表記憶手段、20;被測定物、21;縞次数決定手段、
22;位相演算手段、24;縞次数−位相演算手段、
25;光学系移動手段、26;被測定物移動手段。
Claims (13)
- 平面格子の影を光源から出た光によって、被測定物表面上に投影し、前記影を格子又は当該格子と別の格子を通して観察点で得て、平面格子の影によって生じるモアレ縞を利用して被測定物の表面形状を測定する表面形状測定方法において、
モアレ縞の位相を走査し、その走査時に生じるモアレ縞強度変化の周期を測定し、測定したモアレ縞強度変化の周期に基づいて被測定物の表面形状を測定することを特徴とする表面形状測定方法。 - モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査による被測定物上のモアレ縞強度変化の周期を演算するモアレ縞強度変化周期演算手段と、モアレ縞強度変化の周期の違いに基づいて被測定物の形状データを算出する形状演算手段と有することを特徴とする表面形状測定装置。
- 任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を用いて被測定物の表面形状を測定する請求項1記載の表面形状測定方法。
- モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査によるモアレ縞強度変化が1周期分変化するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するモアレ縞走査量と測定物の高さとの関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物の形状データを算出する形状演算手段とを有することを特徴とする表面形状測定装置。
- 任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を用いて被測定物のモアレ縞次数を決定し、決定したモアレ縞次数を基に被測定物体上のモアレ縞の位相を算出し、被測定物の表面形状を測定する請求項1記載の表面形状測定方法。
- モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞の位相を走査させるモアレ縞位相走査手段と、モアレ縞位相走査によるモアレ縞強度が1周期するのに要したモアレ縞走査量を演算するモアレ縞強度変化周期演算手段と、予め作成しておいた、任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量とモアレ縞次数との関係を示す対応表を記憶する対応表記憶手段と、該対応表に対応させて被測定物のモアレ縞次数を決定する縞次数決定手段と、決定したモアレ縞次数を用いて被測定物体上のモアレ縞位相を演算する位相演算手段と、モアレ縞位相に基づいて被測定物の形状データを算出する形状演算手段とを有することを特徴とする表面形状測定装置。
- 任意の測定物に対して測定したモアレ縞強度が1周期変化するのに要したモアレ縞走査量を測定し、さらにモアレ縞強度が少なくとも2周期以上変化するのに要したモアレ縞走査量を測定した後、それらの測定量から被測定物体上のモアレ縞次数と位相を算出し、被測定物の表面形状を測定する請求項1記載の表面形状測定方法。
- モアレ縞を発生させるための光源と、格子パターンと、モアレ縞の強度を測定する光電変換素子と、モアレ縞強度の位相を走査させるためのモアレ縞位相走査手段と、モアレ縞位相走査によりモアレ縞強度変化が1周期及び少なくとも2周期以上変化に要したモアレ縞走査量を算出する縞強度変化周期演算手段と、演算結果から被測定物体上のモアレ縞次数及び位相を演算する縞次数−位相演算手段と、モアレ縞次数及び位相に基づいて被測定物の形状データを算出する形状演算手段とを有することを特徴とする表面形状測定装置。
- 前記モアレ縞位相走査手段が、前記光源、前記格子パターン及び前記光電変換素子を含む光学系全体を前記格子パターンと垂直方向に移動させるための光学系移動手段を有する請求項2,4,6,8のいずれかに記載の表面形状測定装置。
- 前記モアレ縞位相走査手段が、前記被測定物体を前記格子パターンと垂直方向に移動させるための被測定物移動手段を有している請求項2,4,6,8のいずれかに記載の表面形状測定装置。
- 前記モアレ縞位相走査手段が、前記格子パターンを移動させるための格子パターン移動手段を有している請求項2,4,6,8のいずれかに記載の表面形状測定装置。
- 前記モアレ縞位相走査手段が、前記格子パターンのピッチを変化させるための格子パターンピッチ変更手段を有している請求項2,4,6,8のいずれかに記載の表面形状測定装置。
- 前記モアレ縞位相走査手段が、前記光源と前記光電変換素子間の距離を変化させるための光源−光電素子間距離変更手段を有している請求項2,4,6,8のいずれかに記載の表面形状測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002136786A JP3880882B2 (ja) | 2002-05-13 | 2002-05-13 | 表面形状測定方法及びその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002136786A JP3880882B2 (ja) | 2002-05-13 | 2002-05-13 | 表面形状測定方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003329425A JP2003329425A (ja) | 2003-11-19 |
| JP3880882B2 true JP3880882B2 (ja) | 2007-02-14 |
Family
ID=29698720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002136786A Expired - Fee Related JP3880882B2 (ja) | 2002-05-13 | 2002-05-13 | 表面形状測定方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3880882B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4595697B2 (ja) * | 2005-06-20 | 2010-12-08 | 株式会社安川電機 | 反射型光ギャップセンサ |
| JP2009128030A (ja) * | 2007-11-20 | 2009-06-11 | Tokyo Univ Of Agriculture & Technology | 格子投影型モアレ装置、及び形状測定方法 |
| JP6520077B2 (ja) * | 2014-11-28 | 2019-05-29 | 凸版印刷株式会社 | 表示装置 |
| US12586222B2 (en) | 2022-04-13 | 2026-03-24 | Ricoh Company, Ltd. | Shape-data acquisition apparatus |
-
2002
- 2002-05-13 JP JP2002136786A patent/JP3880882B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003329425A (ja) | 2003-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8605983B2 (en) | Non-contact probe | |
| US20040130730A1 (en) | Fast 3D height measurement method and system | |
| Bergmann | New approach for automatic surface reconstruction with coded light | |
| Haycocks et al. | Traceable calibration of transfer standards for scanning probe microscopy | |
| JP5515432B2 (ja) | 三次元形状計測装置 | |
| US9441959B2 (en) | Calibration method and shape measuring apparatus | |
| RU2148793C1 (ru) | Способ измерения формы и пространственного положения поверхности объекта | |
| JP2005520142A (ja) | 物体の絶対座標測定方法および装置 | |
| US6734978B2 (en) | Profile measuring method and measurement apparatus using interference of light | |
| JP5663758B2 (ja) | 形状測定方法及び形状測定装置 | |
| JP2013178174A (ja) | 複数の格子を用いた三次元形状計測装置 | |
| US8615128B2 (en) | Method for 3D, measurement of the surface of an object, in particular for dental purposes | |
| JP3880882B2 (ja) | 表面形状測定方法及びその装置 | |
| JP4087146B2 (ja) | 形状測定方法及び形状測定装置 | |
| JP2004309402A (ja) | 干渉測定装置及び位相シフト縞解析装置 | |
| JP3921432B2 (ja) | モアレ光学系を用いた形状測定装置及び形状測定方法 | |
| JP2017125707A (ja) | 計測方法および計測装置 | |
| KR100641885B1 (ko) | 수평 방향 스캐닝 방식의 광위상 간섭측정방법 및 장치 | |
| JP4675011B2 (ja) | 形状測定方法および形状測定装置 | |
| KR101008328B1 (ko) | 모아레를 이용한 3차원 측정장치의 격자이동방법 및격자이동장치 | |
| JP4402849B2 (ja) | 表面形状測定方法及び表面形状測定装置 | |
| JP5786999B2 (ja) | 三次元形状計測装置、三次元形状計測装置のキャリブレーション方法 | |
| JP3236051B2 (ja) | 3次元形状測定用格子板とその製造装置および3次元形状測定装置 | |
| JP2942972B2 (ja) | 干渉計測システム | |
| JP2003121129A (ja) | 形状測定装置及び形状測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061027 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061108 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101117 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111117 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111117 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121117 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131117 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |