JP4062020B2 - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP4062020B2 JP4062020B2 JP2002254793A JP2002254793A JP4062020B2 JP 4062020 B2 JP4062020 B2 JP 4062020B2 JP 2002254793 A JP2002254793 A JP 2002254793A JP 2002254793 A JP2002254793 A JP 2002254793A JP 4062020 B2 JP4062020 B2 JP 4062020B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- detected
- turning
- actuator
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本発明は、操舵部材の操作に基づいて転舵輪を転舵させる車両用操舵装置に関するものである。
【0002】
【従来の技術】
近年、ステアリングホイール等の操舵部材と転舵輪との間の機械的な連結を解き、操舵伝達系の一部を電気的な経路で構成する、いわゆるステア・バイ・ワイヤ・システム(単にSBWとも称する)を搭載した車両用操舵装置が提供されている。
この種の車両用操舵装置では、転舵輪を転舵させるための操舵用モータの他、操舵部材に操舵反力を与えるための反力用モータが用いられる。
【0003】
また、操舵部材の操舵角を検出するための操舵角センサと、転舵輪の転舵角を検出するための転舵角センサとが設けられ、これらのセンサからの信号に基づいて、操舵用モータが駆動制御され、例えばラック軸等の転舵軸が位置制御されることになる。
【0004】
【発明が解決しようとする課題】
この種のステア・バイ・ワイヤ・システムでは、操舵用アクチュエータや転舵角センサ等の転舵系に異常が発生した場合のフェールセーフ対策が重要である。
本発明は上記課題に鑑みてなされたものであり、いわゆるステア・バイ・ワイヤ・システムにおいて転舵系の故障発生時にも良好な操舵を達成することができる車両用操舵装置を提供することを目的とする。
【0005】
【課題を解決するための手段及び発明の効果】
上記目的を達成するため、請求項1記載の発明は、操舵部材と、この操舵部材に連なる第1要素、転舵輪に連なる第2要素、並びに、上記第1及び第2要素を関連付ける第3要素を含む差動伝達機構と、転舵輪を転舵させるための操舵用アクチュエータと、差動伝達機構の第3要素に駆動伝達可能に連結され、操舵部材に操舵反力を与えるための反力用アクチュエータと、操舵部材の操舵角を検出するための操舵角検出手段と、転舵輪の転舵角を検出するための転舵角検出手段と、操舵角検出手段により検出される検出操舵角及び転舵角検出手段により検出される検出 転舵角に基づいて、操舵用アクチュエータを駆動制御する制御部と、上記転舵角検出手段又は操舵用アクチュエータの異常発生を検出する転舵系異常発生検出手段とを備え、上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出し、上記制御部は転舵系異常発生検出手段により転舵角検出手段又は操舵用アクチュエータの異常が検出されたときに、反力用アクチュエータを差動伝達機構の伝達比可変のために駆動制御することを特徴とするものである。
【0006】
本発明では、通常時は、反力用アクチュエータに適当なトルクを生じさせることで、差動伝達機構を介して操舵部材に適正な操舵反力を付与する。また、操舵用アクチュエータや転舵角検出手段等の転舵系に異常が発生したときには、反力用アクチュエータを駆動制御して転舵輪を転舵させたり、或いは差動伝達機構の伝達比を変更したりすることができる。
また、上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出するので、下記の利点がある。すなわち、もともと設けられている操舵角検出手段と転舵角検出手段からの信号に基づいてコスト安価に転舵系の異常を検出することができる。
また、請求項2記載の発明は、操舵部材と、この操舵部材に連なる第1要素、転舵輪に連なる第2要素、並びに、上記第1及び第2要素を関連付ける第3要素を含む差動伝達機構と、転舵輪を転舵させるための操舵用アクチュエータと、差動伝達機構の第3要素に駆動伝達可能に連結され、操舵部材に操舵反力を与えるための反力用アクチュエータと、操舵部材の操舵角を検出するための操舵角検出手段と、転舵輪の転舵角を検出するための転舵角検出手段と、操舵角検出手段により検出される検出操舵角及び転舵角検出手段により検出される検出転舵角に基づいて、操舵用アクチュエータを駆動制御する制御部と、上記転舵角検出手段又は操舵用アクチュエータの異常発生を検出する転舵系異常発生検出手段とを備え、上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出し、上記制御部は転舵系異常発生検出手段により転舵角検出手段又は操舵用アクチュエータの異常が検出されたときに、反力用アクチュエータによって上記第3要素を回転不能に拘束することを特徴とするものである。
本発明では、通常時は、反力用アクチュエータに適当なトルクを生じさせることで、差動伝達機構を介して操舵部材に適正な操舵反力を付与する。また、操舵用アクチュエータや転舵角検出手段等の転舵系に異常が発生したときには、反力用アクチュエータによって差動伝達機構の第3要素を回転不能に拘束することで、差動伝達機構の残りの2つの要素による伝達比でのマニュアル操舵を達成することができる。
【0007】
また、上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出するので、下記の利点がある。すなわち、もともと設けられている操舵角検出手段と転舵角検出手段からの信号に基づいてコスト安価に転舵系の異常を検出することができる。
【0008】
【発明の実施の形態】
本発明の好ましい実施の形態を添付図面を参照しつつ説明する。
図1は本発明の一実施の形態の車両用操舵装置の概略構成を示す模式図である。図1を参照して、本車両用操舵装置1は、例えばステアリングホイール等の操舵部材2に一体回転可能に連結される第1操舵軸3と、この第1操舵軸3と同軸上に設けられラックアンドピニオン機構等の舵取り機構4に連結される第2操舵軸5と、第1及び第2操舵軸3,5間の差動回転を許容するための差動伝達機構を構成する遊星伝達機構としての遊星ギヤ機構6とを備える。
【0009】
舵取り機構4は、車両の左右方向に延びて配置された転舵軸7と、この転舵軸7の両端にタイロッド8を介して結合され、転舵輪9を支持するナックルアーム10とを備える。転舵軸7はハウジング11により支承されて軸方向に摺動可能とされており、その途中部に、電動モータからなる操舵用アクチュエータ12が同軸的に組み込まれている。操舵用アクチュエータ12の駆動回転は、ボールねじ機構等の運動変換機構等によって転舵軸7の摺動に変換され、この転舵軸7の摺動により転舵輪9の転舵が達成される。
【0010】
転舵軸7の一部には、ラック7aが形成されており、このラック7aには、第2操舵軸5の端部に設けられて第2操舵軸5と一体回転するピニオン14が噛み合わされている。後述するように、操舵用アクチュエータ12の故障時に、操舵部材2の操作に応じて第2操舵軸5が回転駆動されると、この第2操舵軸5の回転がピニオン14及びラック7aにより、転舵軸7の摺動に変換され、転舵輪9の転舵が達成される。
【0011】
遊星ギヤ機構6は、第1操舵軸3の端部に一体回転可能に連結された入力側となる第1要素(太陽部材)としての太陽ギヤ15と、出力側となるキャリア16により回転自在に保持されて太陽ギヤ15と噛み合う第2要素(遊星部材)としての複数の遊星ギヤ17と、各遊星ギヤ17に噛み合う内歯18aを内周に持つリング部材としてのリングギヤ18とを含む。
リングギヤ18は外歯18bを形成することで例えばウォームホイールを構成している。この外歯18bは例えばウォームからなる駆動伝達ギヤ19を介して、操舵部材2に操作反力を与えるための反力用アクチュエータ20に駆動連結されている。この反力用アクチュエータ20は例えば電動モータからなり、そのケーシングは車体の適所に固定されている。
【0012】
操舵用アクチュエータ12及び反力用アクチュエータ20は、CPU31、制御プログラム等を記憶したROM32、演算処理等のワークエリアとして用いられるRAM33等を含む制御部Cにより制御されるようになっている。
第1操舵軸3には操舵部材2による操舵角を検出するための操舵角検出手段としての操舵角センサ24、及び操舵部材2から入力される操舵トルクを検出するための操舵トルク検出手段としてのトルクセンサ25が設けられている。これら操舵角センサ24及びトルクセンサ25からの検出信号が制御部Cに入力される。
【0013】
また、転舵軸7には転舵軸7の軸方向位置に関連して転舵輪9の転舵角を検出するための転舵角検出手段としての転舵角センサ26が設けられており、この転舵角センサ26による検出信号も制御部Cに入力される。また、制御部Cには、車速を検出するための車速センサ27からの検出信号が入力されるようになっている。
制御部Cは、上記各センサ類からの入力信号に基づいて、操舵用アクチュエータ12及び反力用アクチュエータ20をそれぞれ駆動するための駆動部としての駆動回路28,29に制御信号を出力する。
【0014】
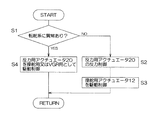
図2は制御部Cにより実行される舵取り制御の処理について説明するためのフローチャートである。図2を参照して、制御部Cは転舵系が正常に動作しているか否かを監視している(ステップS1)。転舵系の異常としては、転舵角センサ26又は操舵用アクチュエータ12の異常が考えられるが、操舵用アクチュエータ12に異常が発生する確率が電装部品である転舵角センサ26に異常が発生する確率よりも格段に低いので、ステップS1の監視としては、実質的に、転舵角センサ26の異常発生を監視していることになる。
【0015】
転舵角センサ26(転舵系)に異常が発生していない場合には(ステップS1でNO)、制御部Cが、反力用アクチュエータ20によって例えば路面反力に応じた操舵反力を操舵部材2に与えるためのトルクを発生させる(ステップS2)。
また、例えば車両の走行状況等に応じて操舵部材2の回転量と転舵輪9の転舵量との比(伝達比、ギヤ比)を設定し、VGR(Variable Gear Ratio)機能を作用させることも可能である。この設定した伝達比及び操舵部材2の操作量などに基づいて、操舵用アクチュエータ12の電圧指令値を設定し、その電圧指令値に応じた制御信号を駆動回路28に与えて、操舵用アクチュエータ12を駆動制御する(ステップS3)。
【0016】
これにより、操舵用アクチュエータ12から、操舵部材2の操作方向に応じた方向に転舵軸7を摺動させるためのトルクが出力され、車両の走行状況や操舵部材2の操作態様に応じた良好な操舵が達成される。なお、必ずしも、VGR機能を設定する必要はない。
こうして、操舵アクチュエータ12を駆動制御している間に、転舵角センサ26(転舵系)に異常が発生すると(ステップS1でYES)、制御部Cは、操舵角センサ24の検出操舵角に応じて転舵輪9の転舵角を位置制御(角度制御)するように駆動回路29に制御信号を出力し反力用アクチュエータ20を駆動制御する(ステップS4)。なお、このとき、操舵用アクチュエータ12はオフ(空回り可能な状態)とする。
【0017】
このようにして、転舵角センサ26等の異常発生時にも、反力用アクチュエータ20を操舵用のアクチュエータとして用いて良好な操舵を達成することができる。なお、ステップS4において、反力用アクチュエータ20をVGR用として駆動制御することも可能である。ただし、転舵角センサ26の検出転舵角を用いるフィードバック制御は行えない。
図2のステップS1における転舵系の異常検出の詳細について、図3のフローチャートに基づいて説明する。
【0018】
転舵角センサ26からの信号入力があるか否かが判断され(ステップT1)、信号が入力されない場合は(ステップT1でNO)、転舵系に異常が発生していると判断し(ステップT2)、図2のフローチャートのステップS4へ移行し、反力用アクチュエータ20を用いての転舵が行われる。又はマニュアル操舵で且つVGR動作が実行される。
次いで、転舵角センサ26からの信号入力がある場合には(ステップT1でYES)、操舵角センサ24及び転舵角センサ26の信号に基づいて走行中の検出操舵角及び検出転舵角を求める(ステップT3)。
【0019】
求められた検出操舵角及び検出転舵角の双方が変動している場合には(ステップT4でNO)、図2のフローチャートのステップS2へ移行し、通常の反力制御及び操舵制御が実施される。
一方、求められた検出操舵角が変動しているにもかかわらず、求められた検出転舵角が一定である場合には(ステップT4でYES)、転舵角センサ26等の転舵系に異常が発生していると判断し(ステップT5)、図2のフローチャートのステップS4へ移行し、反力用アクチュエータ20を用いての転舵又はVGR動作が実行される。
【0020】
本発明は上記実施の形態の限定されるものではなく、例えば、上記の実施の形態では、転舵系に異常が発生したときに、反力用アクチュエータ20を操舵(補助)用又はVGR用として駆動制御したが、図4のフローチャートに示すように、転舵系に異常が発生したときに(ステップU1でYES)、反力用アクチュエータ20を停止ロックさせて(ステップU4)、リングギヤ18を回転不能に拘束し、これにより、操舵部材2と舵取り機構4とを遊星ギヤ機構6を介して機械的に結合させ、遊星ギヤ機構6の残りの2つの要素による伝達比でマニュアル操舵による良好な操舵を達成するようにしても良い。なお、図4で示すフローチャートにおいて、ステップU2、U3は、前記ステップS2、S3とそれぞれ同じである。
【0021】
その他、本発明の特許請求の範囲で種々の変更を施すことができる。
【図面の簡単な説明】
【図1】本発明の一実施の形態の車両用操舵装置の概略構成を示す模式図である。
【図2】図1の車両用操舵装置の舵取り制御の流れを示すフローチャートである。
【図3】図2のフローチャートにおいて異常検出のステップの詳細を示すフローチャートである。
【図4】本発明の別の実施の形態の車両用操舵装置の舵取り制御の流れを示すフローチャートである。
【符号の説明】
1 車両用操舵装置
2 操舵部材
3 第1操舵軸
4 舵取り機構
5 第2操舵軸
6 遊星ギヤ機構(差動伝達機構)
7 転舵軸
7a ラック
9 転舵輪
12 操舵用アクチュエータ
14 ピニオン
15 太陽ギヤ(第1要素)
16 キャリア(第2要素)
17 遊星ギヤ(第2要素)
18 リングギヤ(第3要素)
18a 内歯
18b 外歯
19 駆動伝達ギヤ
20 反力用アクチュエータ
C 制御部(転舵系異常発生検出手段)
24 操舵角センサ(操舵角検出手段)
25 トルクセンサ
26 転舵角センサ(転舵角検出手段)
27 車速センサ
28,29 駆動回路
31 CPU
32 ROM
33 RAM
Claims (2)
- 操舵部材と、
この操舵部材に連なる第1要素、転舵輪に連なる第2要素、並びに、上記第1及び第2要素を関連付ける第3要素を含む差動伝達機構と、
転舵輪を転舵させるための操舵用アクチュエータと、
差動伝達機構の第3要素に駆動伝達可能に連結され、操舵部材に操舵反力を与えるための反力用アクチュエータと、
操舵部材の操舵角を検出するための操舵角検出手段と、
転舵輪の転舵角を検出するための転舵角検出手段と、
操舵角検出手段により検出される検出操舵角及び転舵角検出手段により検出される検出 転舵角に基づいて、操舵用アクチュエータを駆動制御する制御部と、
上記転舵角検出手段又は操舵用アクチュエータの異常発生を検出する転舵系異常発生検出手段とを備え、
上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出し、
上記制御部は転舵系異常発生検出手段により転舵角検出手段又は操舵用アクチュエータの異常が検出されたときに、反力用アクチュエータを差動伝達機構の伝達比可変のために駆動制御することを特徴とする車両用操舵装置。 - 操舵部材と、
この操舵部材に連なる第1要素、転舵輪に連なる第2要素、並びに、上記第1及び第2要素を関連付ける第3要素を含む差動伝達機構と、
転舵輪を転舵させるための操舵用アクチュエータと、
差動伝達機構の第3要素に駆動伝達可能に連結され、操舵部材に操舵反力を与えるための反力用アクチュエータと、
操舵部材の操舵角を検出するための操舵角検出手段と、
転舵輪の転舵角を検出するための転舵角検出手段と、
操舵角検出手段により検出される検出操舵角及び転舵角検出手段により検出される検出転舵角に基づいて、操舵用アクチュエータを駆動制御する制御部と、
上記転舵角検出手段又は操舵用アクチュエータの異常発生を検出する転舵系異常発生検出手段とを備え、
上記転舵系異常発生検出手段は、操舵角検出手段により検出される検出操舵角が変動しているにもかかわらず、転舵角検出手段により検出される検出転舵角が一定である場合に、転舵角検出手段又は操舵用アクチュエータの異常を検出し、
上記制御部は転舵系異常発生検出手段により転舵角検出手段又は操舵用アクチュエータの異常が検出されたときに、反力用アクチュエータによって上記第3要素を回転不能に拘束することを特徴とする車両用操舵装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002254793A JP4062020B2 (ja) | 2002-08-30 | 2002-08-30 | 車両用操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002254793A JP4062020B2 (ja) | 2002-08-30 | 2002-08-30 | 車両用操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004090782A JP2004090782A (ja) | 2004-03-25 |
| JP4062020B2 true JP4062020B2 (ja) | 2008-03-19 |
Family
ID=32060478
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002254793A Expired - Fee Related JP4062020B2 (ja) | 2002-08-30 | 2002-08-30 | 車両用操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4062020B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5019104B2 (ja) | 2006-12-28 | 2012-09-05 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP4623063B2 (ja) * | 2007-08-02 | 2011-02-02 | 株式会社デンソー | 操舵補助装置 |
| JP7211149B2 (ja) | 2019-02-21 | 2023-01-24 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
-
2002
- 2002-08-30 JP JP2002254793A patent/JP4062020B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004090782A (ja) | 2004-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4147836B2 (ja) | 車両用操舵装置 | |
| CN113508068B (zh) | 用于转动可转向的车轮的装置 | |
| CN100572164C (zh) | 转向设备 | |
| CN111615482B (zh) | 用于使可操纵的车轮转向的装置 | |
| JP2005041283A (ja) | 操舵制御装置 | |
| JP4285310B2 (ja) | 車両の操舵装置 | |
| KR20220020973A (ko) | 조향 가능 차량 휠의 회전에서 이용하기 위한 장치 | |
| JP4930751B2 (ja) | ステアリング装置 | |
| US20230399046A1 (en) | Apparatus for use in turning steerable vehicle wheels | |
| CN112874628A (zh) | 一种具有失效防护功能的线控冗余转向系统及其控制方法 | |
| JP4055520B2 (ja) | 車両用操舵装置 | |
| US7909132B2 (en) | Apparatus for use in turning steerable vehicle wheels | |
| JP5131513B2 (ja) | 電動パワーステアリング装置 | |
| JP4106990B2 (ja) | 車両用操舵装置 | |
| JP4720362B2 (ja) | 操舵装置 | |
| JP2005112025A (ja) | 操舵制御装置 | |
| CN118144863A (zh) | 用于使可转向车轮转动的线控转向设备 | |
| JP4055519B2 (ja) | 車両用操舵装置 | |
| JP4062020B2 (ja) | 車両用操舵装置 | |
| JP2008273419A (ja) | 車両の操舵制御装置 | |
| JP4055484B2 (ja) | 車両用操舵装置 | |
| JP4062038B2 (ja) | 車両用操舵装置 | |
| JPH05262243A (ja) | 電動式動力舵取装置 | |
| CN214607701U (zh) | 一种具有失效防护功能的线控冗余转向系统 | |
| JP2005035360A (ja) | 車両の操舵制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070814 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071217 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130111 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |