JP4083533B2 - 半導体装置の製造方法 - Google Patents
半導体装置の製造方法 Download PDFInfo
- Publication number
- JP4083533B2 JP4083533B2 JP2002308721A JP2002308721A JP4083533B2 JP 4083533 B2 JP4083533 B2 JP 4083533B2 JP 2002308721 A JP2002308721 A JP 2002308721A JP 2002308721 A JP2002308721 A JP 2002308721A JP 4083533 B2 JP4083533 B2 JP 4083533B2
- Authority
- JP
- Japan
- Prior art keywords
- alignment jig
- recognition
- optical probe
- chip
- recognition pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W72/00—Interconnections or connectors in packages
- H10W72/701—Tape-automated bond [TAB] connectors
Landscapes
- Wire Bonding (AREA)
Description
【発明の属する技術分野】
本発明は、半導体製造技術に関し、特に、集積回路が形成された半導体チップを支持するチップ支持部材である配線基板やリードフレームなどにダイボンディングする工程を含む半導体装置の製造に適用して有効な技術に関するものである。
【0002】
【従来の技術】
半導体チップをフリップチップ実装でチップ支持部材に接合する半導体製造装置として、フリップチップボンダが知られている。フリップチップボンダは、半導体チップの主面に設けられた電極とチップ支持部材の電極とを位置合わせして直接密着させ、熱および圧力を加えて接合するワイヤレスボンディング装置である。
【0003】
なお、種々のフリップチップボンダについては、たとえば株式会社プレスジャーナル1998年7月27日発行、「月刊 Semiconductor World 増刊号 '99半導体組立・検査技術」、119〜123頁に記載されている。
【0004】
近年、小型化を図った半導体装置として、CSP(Chip Size Package)と呼ばれる半導体装置が開発されている。その構造は様々であり、チップ支持部材の材料、構造または内部接続構造などから種々の構造に分類される。実用機器に採用されているCSPとしては、たとえばフィルムからなる薄膜のテープ状のチップ支持部材を用い、フェイスダウン方式でチップ支持部材に半導体チップが実装されたCSPを例示することができる。
【0005】
フリップチップボンダを用いたCSPのチップボンディングでは、たとえば半導体チップの主面とテープ状のチップ支持部材のチップ支持面とを対向して配置し、さらにその間に、認識用カメラを備える光学プローブを配置し、この光学プローブによって得られた位置情報に基づき半導体チップとチップ支持部材とを接合する方法が採られている。光学プローブを用いた位置認識では、2視野の光学系を用い、2台の認識用カメラのうち一方を半導体チップ認識用、他方をチップ支持部材認識用として用いている。
【0006】
たとえば、特開2002−110742号公報には、半導体チップの認識マークとチップ支持部材の認識マークとを対向させて配置し、光学系の1回の認識動作で半導体チップとチップ支持部材とにおける対向する認識マークの位置を求め、これを2箇所の認識マークに対して繰り返して行い、半導体チップとチップ支持部材の位置を効率良く認識して両者を接合する技術が開示されている。
【0007】
【発明が解決しようとする課題】
しかしながら、本発明者らが検討したところ、光学プローブで得られた位置情報をもとに半導体チップまたはチップ支持部材の位置補正を行い、その後半導体チップとチップ支持部材とを接合しても、機械組立精度、マウントステージの上昇時の直進性、光学プローブの上視野と下視野との間の光軸ずれ等によって半導体チップおよびチップ支持部材の認識マークの正確な位置情報が得られず、得られた位置情報をもとに位置補正を行うと、目標とするボンディング精度が得られないという問題が生ずることが明らかとなった。
【0008】
さらに、フリップチップボンダでは、チップ支持部材を搭載するマウントステージと、これに対向して設置された半導体チップを支持するマウントヘッドとを500度程度まで加熱している。すなわち、マウントステージおよびボンディングヘッドによって半導体チップとチップ支持部材とに対して荷重および熱などを付与することで、半導体チップとチップ支持部材との接合を強めている。
【0009】
しかし、マウントステージおよびボンディングヘッドを高温にするため、光学プローブが認識動作中に加熱されて変形することがある。このため、上視野と下視野との間に光軸ずれが生じ、その位置情報をもとに位置補正を行うと、上記光軸ずれが半導体チップとチップ支持部材とのボンディングのずれとなって現われる。
【0010】
本発明の目的は、ボンディング装置に備わる光学プローブの上下視野の光軸ずれを補正した、高精度のボンディングを行うことのできる技術を提供することにある。
【0011】
本発明の他の目的は、ボンディング装置に備わる光学プローブの温度上昇による上下視野の光軸ずれを抑制して、高精度のボンディングを行うことのできる技術を提供することにある。
【0012】
本発明の前記ならびにその他の目的と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【0013】
【課題を解決するための手段】
本願において開示される発明のうち、代表的なものの概要を簡単に説明すれば、次のとおりである。
【0014】
本発明は、第1あわせ治具と第2あわせ治具とを対向して上下に配置し、第1あわせ治具と第2あわせ治具との間に、第1あわせ治具の認識パターンと第2あわせ治具の認識パターンとが撮像可能な光学プローブを配置する工程と、光学プローブの上視野によって第1あわせ治具の認識パターンを撮像し、同時に光学プローブの下視野によって第2あわせ治具の認識パターンを撮像して、対向する上記両者の認識パターンの位置を求める工程と、求められた上記両者の認識パターンの位置に基づいて第1あわせ治具と第2あわせ治具とを位置合わせして接合する工程と、光学プローブの下視野によって第1あわせ治具の認識パターンを撮像して、第1あわせ治具の認識パターンの位置を求める工程と、光学プローブの上視野で求められた第1あわせ治具の認識パターンの位置と光学プローブの下視野で求められた第1あわせ治具の認識パターンの位置とのずれを求める工程とを有し、半導体チップとチップ支持部材とを接合する際の位置補正に、上記ずれを光学プローブの上下視野の光軸ずれとして加味するものである。
【0015】
また、本発明は、半導体チップとチップ支持部材とを対向して上下に配置し、半導体チップとチップ支持部材との間に、半導体チップの認識パターンとチップ支持部材の認識パターンとが撮像可能な光学プローブを配置する工程と、光学プローブによって半導体チップの認識パターンとチップ支持部材の認識パターンとを撮像して、対向する上記両者の認識パターンの位置を求める工程と、求められた上記両者の認識パターンの位置に基づいて半導体チップとチップ支持部材とを位置合わせして接合する工程とを有し、光学プローブを冷却保温システムで囲むものである。
【0016】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において同一機能を有するものは同一の符号を付し、その繰り返しの説明は省略する。
【0017】
(実施の形態1)
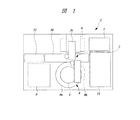
図1に、本実施の形態1であるフリップチップボンダの構成概略図、図2に、このフリップチップボンダのボンディング処理部を拡大した概略図を示す。
【0018】
フリップチップボンダは、たとえばCSPを組み立てる際に、半導体チップ(以下、単にチップという)のチップ支持部材へのボンディングを行う製造装置であり、チップとチップ支持部材との接合を行うものである。本実施の形態1では、チップ支持部材の一例としてテープ状の薄膜の配線基板を用いた場合を説明する。従ってフリップチップボンダは、チップ支持部材であるテープ状の配線基板にチップをボンディングするものである。
【0019】
フリップチップボンダ1のボンディング処理部2には、配線基板3支持用のステージであるマウントステージ2aと、マウントステージ2aと対向してその上方に設けられたボンディングヘッド2bとが設置されている。半導体ウエハ4からピックアップされたチップ5は、ボンディングヘッド2bの先端のコレット2cによって吸着、保持される。
【0020】
マウントステージ2aおよびボンディングヘッド2bは、配線基板3とチップ5とに対して荷重および熱などを付与して両者を接合するものである。マウントステージ2aは、XY方向に移動自在なXYテーブル6に取付けられ、かつZ移動機構によってガイドされており、これによってXYZ方向に移動可能となっている。また、ボンディングヘッド2bは、回転可能であるとともに、XYZ方向にも移動可能に設置されている。
【0021】
さらに、ボンディング処理部2には、光学系を搭載した光学プローブ2dが、ボンディングヘッド2bのコレット2cに支持されたチップ5と、マウントステージ2aに搭載された配線基板3との間に配置可能なように移動自在に設けられている。光学系が取り込んだ情報は認識部7で処理され、情報に基づいて配線基板3の認識マーク3aおよびチップ5の認識マーク5aの位置が求められる。
【0022】
ウエハセット部8には、ダイシング済みの半導体ウエハ4が配置されたウエハ支持台8aと、このウエハ支持台8aに搭載されたダイシング済みの半導体ウエハ4からボンディングすべきチップ5をピックアップするとともに、ピックアップしたチップ5を表裏反転させてボンディングヘッド2bのコレット2cに受け渡すフリップヘッド8bとが設置されている。このウエハセット部8では、ダイシング済みの半導体ウエハ4からのチップ5のピックアップと、チップ5のボンディングヘッド2bへの移載とが行われる。
【0023】
なお、ウエハセット部8への半導体ウエハ4の移載は、ウエハリフタ9によって行われる。また、搬送部10への配線基板3の送り出しは、ローダ11によって行われ、さらにチップボンディング後の配線基板3は、アンローダ12に収容される。
【0024】
図3に、本実施の形態1であるフリップチップボンダを用いてチップボンディングが行われたCSPの要部断面図を示す。
【0025】
このCSP13は、その外観サイズがチップ5より若干大きい程度の小型のものであり、チップ5の主面5b(半導体集積回路が形成されている面)の外周部にその表面電極である複数のパッド5cが配置されている場合を説明する。パッド5cが設置される箇所については、特に限定されるものではなく、チップ5の主面5bの外周部であっても、または内放(たとえばセンターパッド配列)であっても、あるいはその両者などであってもよい。
【0026】
CSP13の構成は、チップ5のパッド5cと接続されるリード3bとを有し、かつこのリード3bと接続されるとともに、外部端子であるバンプ電極14とも接続される配線3cが設けられた薄膜のテープ状の配線基板3と、配線基板3とチップ5との間に配置された弾性部材であるエラストマ15と、配線基板3の開口部3dにおいて封止樹脂などによりパッド5cとリード3bとを封止して形成された封止部16とからなる。
【0027】
ここで、薄膜のテープ状の配線基板3は、たとえばポリイミド系のフィルム基材などによって形成されたものである。また、封止部16に用いられる封止材料は、たとえばエポキシ系の熱硬化性樹脂などであり、モールドまたはポッティングなどによって樹脂封止が行われる。
【0028】
次に、本実施の形態1であるチップボンディング方法を前記図1〜図3および図4〜図8に示すフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図を用い、2つのステップ(ステップ1、ステップ2)に分けて説明する。
(ステップ1)
まず、あわせ治具を用いてフリップチップボンダに備わる光学プローブの上下視野の光軸ずれ量を求める。
【0029】
図4に示すように、ボンディングヘッド2bの先端に設けられたコレット2cによって第1あわせ治具17を吸着、保持し、この第1あわせ治具17をマウントステージ2aの上方で待機させる。一方、マウントステージ2a上に第2あわせ治具18を配置させる。次に、コレット2cによって支持された第1あわせ治具17とこれに対向するようにマウントステージ2aに搭載された第2あわせ治具18との間に、第1あわせ治具17に設けられたリードパターン(認識パターン)17aおよび第2あわせ治具18に設けられたパッドパターン(認識パターン)18aの撮像を可能とする光学系を搭載した光学プローブ2dを配置する。
【0030】
さらに、光学プローブ2dに備わる下視野認識カメラ2d1によって第2あわせ治具18のパッドパターン18aの画像が取り込める箇所に光学プローブ2dを移動させ、続いて光学プローブ2dに備わる上視野認識カメラ2d2によって第1あわせ治具17のリードパターン17aの画像が取り込める箇所にボンディングヘッド2bによって第1あわせ治具17を移動させる。
【0031】
その後、上視野認識カメラ2d2によって、プリズム2d3を介して第1あわせ治具17のリードパターン17aを撮像し、同様に下視野認識カメラ2d1によって、プリズム2d4を介して第2あわせ治具18のパッドパターン18aを撮像して、光学系の認識動作で第1あわせ治具17のリードパターン17aおよび第2あわせ治具18のパッドパターン18aの位置情報をそれぞれ求める。その際、第1あわせ治具17のリードパターン17aの画像および第2あわせ治具18のパッドパターン18aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれほぼ同時に取り込み、認識部7においてデータ処理する。
【0032】
次に、図5に示すように、求められた第1あわせ治具17のリードパターン17aおよび第2あわせ治具18のパッドパターン18aのそれぞれの位置情報に基づいて、第1あわせ治具17のリードパターン17aの中心と第2あわせ治具18のパッドパターン18aの中心とが一致するように位置合わせして、第1あわせ治具17と第2あわせ治具18とを接合する。
【0033】
続いて、下視野認識カメラ2d1によって、プリズム2d4を介して第1あわせ治具17のリードパターン17aを撮像して、光学系の認識動作で第1あわせ治具17のリードパターン17aの位置情報を求める。上視野認識カメラ2d2によって撮像され、得られた第1あわせ治具17のリードパターン17aの位置情報と、下視野認識カメラ2d1によって撮像され、得られた第1あわせ治具17のリードパターン17aの位置情報との差を算出し、この差を光学プローブ2dの上下視野の光軸ずれ量とする。この光軸ずれ量は、チップ5と配線基板3との位置合わせにおいて位置補正量に加味される。
(ステップ2)
次に、チップ5と配線基板3とを接合してチップボンディングする。
【0034】
まず、薄膜のテープ状の配線基板3を準備し、さらにウエハセット部8のウエハ支持台8aに、ウエハリフタ9によってダイシンング済みの半導体ウエハ4をセットする。
【0035】
次に、ウエハセット部8においてチップボンディングが行われるチップ5をフリップヘッド8bによって半導体ウエハ4からピックアップし、さらにその表裏を反転させてボンディング処理部2に移動させる。その後、このチップ5の裏面5dをボンディングヘッド2bの先端に設けられたコレット2cによって吸着、保持し、チップ5をマウントステージ2aの上方で待機させる。一方、ローダ11から搬送部10に配線基板3を送り出し、搬送部10からボンディング処理部2のマウントステージ2a上に配線基板3を配置させる。
【0036】
次に、図6に示すように、ボンディングヘッド2bのコレット2cによって支持されたチップ5とこれに対向するようにマウントステージ2aに搭載された配線基板3との間に、チップ5の認識マーク5aおよび配線基板3の認識マーク3aが撮像可能な光学系を搭載した光学プローブ2dを配置する。
【0037】
さらに、下視野認識カメラ2d1によって配線基板3の1点目の認識マーク3aの画像が取り込める箇所に光学プローブ2dを移動させ、続いて上視野認識カメラ2d2によってチップ5の1点目の認識マーク5aの画像が取り込める箇所にボンディングヘッド2bによってチップ5を移動させる。
【0038】
続いて、上視野認識カメラ2d2によってチップ5の1点目の認識マーク5aを撮像し、同時に下視野認識カメラ2d1によって配線基板3の1点目の認識マーク3aを撮像して、光学系の1回の認識動作でチップ5の1点目の認識マーク5aの位置情報および配線基板3の1点目の認識マーク3aの位置情報を求める。その際、チップ5の1点目の認識マーク5aの画像および配線基板3の1点目の認識マーク3aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれ同時に取り込み、認識部7でデータ処理する。
【0039】
その後、図7に示すように、下視野認識カメラ2d1によって配線基板3の2点目の認識マーク3aの画像が取り込める箇所に光学プローブ2dを移動させ、続いて上視野認識カメラ2d2によってチップ5の2点目の認識マーク5aの画像が取り込める箇所にボンディングヘッド2bによってチップ5を移動させる。
【0040】
続いて、上視野認識カメラ2d2によってチップ5の2点目の認識マーク5aを撮像し、同時に下視野認識カメラ2d1によって配線基板3の2点目の認識マーク3aを撮像して、光学系の1回の認識動作でチップ5の2点目の認識マーク5aの位置情報および配線基板3の2点目の認識マーク3aの位置情報を求める。その際、チップ5の2点目の認識マーク5aの画像および配線基板3の2点目の認識マーク3aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれ同時に取り込み、認識部7でデータ処理する。
【0041】
次に、あらかじめ登録されているチップ5の認識マーク5aの位置情報および配線基板3の認識マーク3aの位置情報と、光学系の認識動作で得られたチップ5の認識マーク5aの画像および配線基板3の認識マーク3aの画像をデータ処理した位置情報とによってチップ5および配線基板3のそれぞれの位置を求めた後、光学プローブ2dの上下視野の光軸ずれ量を加味して、求められたチップ5および配線基板3の位置を補正する。
【0042】
続いて、チップ5および配線基板3の補正された位置に基づいてチップ5と配線基板3とを位置合わせし、マウントステージ2aとボンディングヘッド2bとによってチップ5および配線基板3に荷重や熱などを付与して両者を接合し、チップボンディングする。
【0043】
チップマウント後、配線基板3をアンローダ12に送り、そこに収容する。次に、リードボンディングを行う。ここでは、チップ5のパッド5cと配線基板3のリード3bとをインナリードボンダなどを用いて接続する。
【0044】
次に、封止を行う。ここでは、封止樹脂を用いてポッティングなどによってチップ5のパッド5cおよびリード3bの樹脂封止を行い、これにより、封止部16を形成する。
【0045】
続いて、ボール付けを行う。ここでは、配線基板3の配線3cとつながる所定位置のランドにそれぞれ1つずつ外部端子である半田ボールを搭載して所定数のバンプ電極14を形成する。その後、選別・マークを行って前記図3に示すCSPが略完成する。
【0046】
なお、本実施の形態1では、光学プローブ2dの上下視野の光軸ずれ量を求める際、上視野認識カメラ2d2によって撮像され、得られた第1あわせ治具17のリードパターン17aの位置情報と、第1あわせ治具17と第2あわせ治具とを接合した後に下視野認識カメラ2d1によって撮像され、得られた第1あわせ治具17のリードパターン17aの位置情報との差を求め、この差を光学プローブ2dの上下視野の光軸ずれ量としたが、図8に示すように、下視野認識カメラ2d1によって撮像され、得られた第2あわせ治具18のパッドパターン18aの位置情報と、第2あわせ治具18と第1あわせ治具17とを接合した後に上視野認識カメラ2d2によって撮像され、得られた第2あわせ治具18のパッドパターン18aの位置情報との差を求め、この差を光学プローブ2dの上下視野の光軸ずれ量としてもよい。
【0047】
このように、本実施の形態1によれば、チップ5とこれに対向して配置された配線基板3とを位置合わせする際、チップ5の認識マーク5aの位置情報および配線基板3の認識マーク3aの位置情報を基にチップ5および配線基板3の位置をそれぞれ求め、さらにその位置の補正に、第1あわせ治具および第2あわせ治具を用いて求められた光学プローブ2dの上下視野の光軸ずれ量を加味することで、上下視野の光軸ずれを補正した精度の高いチップボンディングを行うことができる。
【0048】
(実施の形態2)
本実施の形態2であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を図9および図10に示す認識原理図を用いて説明する。本実施の形態2では、前記実施の形態1と同様に、第1あわせ治具17および第2あわせ治具18を用いてフリップチップボンダ1に備わる光学プローブ2dの上下視野の光軸ずれ量を求めるが、光学プローブ2dの他にもう1つの光学プローブ19を設けることによって、光学プローブ2dの上下視野の光軸ずれ量を求める。
【0049】
まず、図9に示すように、マウントステージ2aの上方に第1あわせ治具20を設置する。一方、マウントステージ2a上に第2あわせ治具21を配置する。次に、第1あわせ治具20とこれに対向するようにマウントステージ2aに搭載された第2あわせ治具21との間に、第1あわせ治具20に設けられたリードパターン(認識パターン)20aおよび第2あわせ治具21に設けられたパッドパターン(認識パターン)21aの撮像を可能とする光学系を搭載した光学プローブ2dを配置する。
【0050】
さらに、下視野認識カメラ2d1によって第2あわせ治具21のパッドパターン21aの画像が取り込める箇所に光学プローブ2dを移動させ、続いて上視野認識カメラ2d2によって第1あわせ治具20のリードパターン20aの画像が取り込める箇所に第1あわせ治具20を移動させる。
【0051】
その後、上視野認識カメラ2d2によって、プリズム2d3を介して第1あわせ治具20のリードパターン20aを撮像し、同様に下視野認識カメラ2d1によって、プリズム2d4を介して第2あわせ治具21のパッドパターン21aを撮像して、光学系の認識動作で第1あわせ治具20のリードパターン20aの中心座標および第2あわせ治具21のパッドパターン21aの中心座標を求める。その際、第1あわせ治具20のリードパターン20aの画像および第2あわせ治具21のパッドパターン21aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれほぼ同時に取り込んでデータ処理する。
【0052】
次に、第1あわせ治具20のリードパターン20aの中心座標と第2あわせ治具21のパッドパターン21aの中心座標とが一致するように、マウントステージ2aをXYθ方向に移動する。その後、第1あわせ治具20の上方に設置された光学プローブ19の認識カメラ19aによって第1あわせ治具20のリードパターン20aを撮像して、光学プローブ19の認識動作で第1あわせ治具20のリードパターン20aの中心座標を求める。
【0053】
次に、図10に示すように、マウントステージ2aを上昇させて、求められた第1あわせ治具20のリードパターン20aおよび第2あわせ治具21のパッドパターン21aのそれぞれの位置情報に基づいて、第1あわせ治具20のリードパターン20aの中心と第2あわせ治具21のパッドパターン21aの中心とが一致するように位置合わせして、第1あわせ治具20と第2あわせ治具21とを重ね合わせる。
【0054】
続いて、光学プローブ19の認識カメラ19aによって第2あわせ治具21のパッドパターン21aを撮像して、光学系の認識動作で第2あわせ治具21のパッドパターン21aの中心座標を求める。認識カメラ19aによって撮像され、得られた第1あわせ治具20のリードパターン20aの中心座標と、第1あわせ治具20と第2あわせ治具21とを接合した後に認識カメラ19aによって撮像され、得られた第2あわせ治具21のパッドパターン21aの中心座標との差を算出し、この差を光学プローブ2dの上下視野の光軸ずれ量とする。この光軸ずれ量は、チップ5と配線基板3との位置合わせにおいて位置補正量に加味される。
【0055】
このように、本実施の形態2によれば、前記実施の形態1と同様に、光学プローブ2dの上下視野の光軸ずれ量を求め、これをチップ5と配線基板3との位置の補正に加味することで、上下視野の光軸ずれを補正した精度の高いチップボンディングを行うことができる。
【0056】
(実施の形態3)
本実施の形態3であるフリップチップボンダに備わる光学プローブの構造を図図11および図12に示す認識原理図を用いて説明する。
【0057】
本実施の形態3の光学プローブ2eは、前記図4に示した実施の形態1の光学プローブ2dと同様に、チップ5の認識マーク5aと配線基板3の認識マーク3aとが撮像可能な光学系を有し、チップ5の認識マーク5aの画像を取り込む上視野認識カメラ2d2およびプリズム2d3と、配線基板3の認識マーク3aの画像を取り込む下視野認識カメラ2d1およびプリズム2d4とが搭載されている。
【0058】
さらに、光学系は冷却保温システム22で囲まれており、この冷却保温システム22によってフリップチップボンダ1の雰囲気温度、ならびにマウントステージ2aおよびボンディングヘッド2bからの熱などを遮断し、光学プローブ2eに搭載された光学系の温度を一定に保つことができる。冷却保温の方法としては、たとえば光学プローブ2eに温度検出センサを設置してペルチエ素子によって加熱冷却する方法、または水冷にて冷却する方法などを例示することができる。
【0059】
これにより、マウントステージ2aおよびボンディングヘッド2bを高温にしても、光学プローブ2eの光学系が認識動作中に加熱されないので、上視野認識カメラ2d2と下視野認識カメラ2d1との間に光軸のずれが生じ難くなる。従って、マウントステージ2aおよびボンディングヘッド2bからの熱などの影響を受けずに、チップ5の認識マーク5aおよび配線基板3の認識マーク3aの位置情報をもとにチップ5および配線基板3の位置補正が行われて、チップ5と配線基板3とを精度よく接合することができる。
【0060】
チップ5と配線基板3とを接合するチップボンディングは、たとえば以下ようにして行う。
【0061】
まず、図11に示すように、ボンディングヘッド2bのコレット2cによって支持されたチップ5とこれに対向するようにマウントステージ2aに搭載された配線基板3との間に、チップ5の認識マーク5aおよび配線基板3の認識マーク3aが撮像可能な光学系が搭載され、冷却保温システム22が備えられた光学プローブ2eを配置する。
【0062】
さらに、下視野認識カメラ2d1によって配線基板3の1点目の認識マーク3aの画像が取り込める箇所に光学プローブ2dを移動させ、続いて上視野認識カメラ2d2によってチップ5の1点目の認識マーク5aの画像が取り込める箇所にボンディングヘッド2bによってチップ5を移動させる。
【0063】
続いて、上視野認識カメラ2d2によってチップ5の1点目の認識マーク5aを撮像し、同時に下視野認識カメラ2d1によって配線基板3の1点目の認識マーク3aを撮像して、光学系の1回の認識動作でチップ5の1点目の認識マーク5aの位置情報および配線基板3の1点目の認識マーク3aの位置情報を求める。その際、チップ5の1点目の認識マーク5aの画像および配線基板3の1点目の認識マーク3aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれ同時に取り込んでデータ処理する。
【0064】
次に、図12に示すように、下視野認識カメラ2d1によって配線基板3の2点目の認識マーク3aの画像が取り込める箇所に光学プローブ2eを移動させ、さらに上視野認識カメラ2d2によってチップ5の2点目の認識マーク5aの画像が取り込める箇所にボンディングヘッド2bによってチップ5を移動させる。
【0065】
続いて、上視野認識カメラ2d2によってチップ5の2点目の認識マーク5aを撮像し、同時に下視野認識カメラ2d1によって配線基板3の2点目の認識マーク3aを撮像して、光学系の1回の認識動作でチップ5の2点目の認識マーク5aの位置情報および配線基板3の2点目の認識マーク3aの位置情報を求める。その際、チップ5の2点目の認識マーク5aの画像および配線基板3の2点目の認識マーク3aの画像を上視野認識カメラ2d2および下視野認識カメラ2d1によってそれぞれ同時に取り込んでデータ処理する。
【0066】
次に、あらかじめ登録されているチップ5の認識マーク5aの位置情報および配線基板3の認識マーク3aの位置情報と、光学系の認識動作で得られたチップ5の認識マーク5aの画像および配線基板3の認識マーク3aの画像をデータ処理した位置情報とによってチップ5および配線基板3のそれぞれの位置を求めた後、求められたチップ5および配線基板3の位置を補正する。
【0067】
続いて、チップ5および配線基板3の補正された位置に基づいてチップ5と配線基板3とを位置合わせし、マウントステージ2aとボンディングヘッド2bとによってチップ5および配線基板3に荷重や熱などを付与して両者を接合し、チップボンディングする。
【0068】
このように、本実施の形態3によれば、フリップチップボンダ1の雰囲気温度、ならびにマウントステージ2aまたはボンディングヘッド2bからの熱などの影響を受けずに、チップ5の認識マーク5aおよび配線基板3の認識マーク3aの位置情報が得られるので、熱に起因する光学プローブ2eの光軸ずれを抑制した精度の高いチップボンディングを行うことができる。
【0069】
なお、本実施の形態3の光学プローブ2eに備えられた冷却保温システム22は、前記実施の形態1または前記実施の形態2に記載した光学プローブ2dにも備えることができる。これにより、熱に起因する光学プローブ2dの上視野と下視野との間の光軸ずれをなくして、光学プローブ2dの機械的要因などによる光学プローブ2dの上視野と下視野との間の光軸ずれ量を再現性よく正確に算出することができる。
【0070】
以上、本発明者によってなされた発明を発明の実施の形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。
【0071】
たとえば、前記実施の形態では、本発明を半導体装置がCSPの場合の製造方法について説明したが、チップとチップ支持部材とが前記実施の形態のチップボンディング方法によって接合されて組み立てられたものであれば、いかなる半導体装置の製造方法にも適用することができる。
【0072】
【発明の効果】
本願によって開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば、以下のとおりである。
【0073】
チップボンディングにおいてチップとこれに対向して配置されたチップ支持部材との位置を求める際、チップの認識マークの位置情報およびチップ支持部材の認識マークの位置情報を基にチップの位置およびチップ支持部材の位置を求め、さらにその位置の補正に、あらかじめ求めておいた光学プローブの上下視野の光軸ずれ量を加味することによって、上下視野の光軸ずれを補正した精度の高いチップボンディングを行うことができる。
【0074】
さらに、光学プローブを冷却保温システムで囲み、チップの認識マークおよびチップ支持部材の認識マークの位置情報を基にチップおよびチップ支持部材の位置をそれぞれ求めることによって、熱に起因する上下視野の光軸ずれを抑制した精度の高いチップボンディングを行うことができる。
【0075】
さらに精度の高いチップボンディングを行うことができることから、半導体チップとチップ支持部材との位置ずれによる断線やショート等が防止できて、半導体装置の製造歩留まりを向上することができる。
【図面の簡単な説明】
【図1】本発明の実施の形態1であるフリップチップボンダの構造を示す構成概略図である。
【図2】本発明の実施の形態1であるチップボンディング時の状態の一例を示す概略図である。
【図3】本発明の実施の形態1であるフリップチップボンダを用いて製造された半導体装置の一例であるCSPの構造を示す断面図である。
【図4】本発明の実施の形態1であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図5】本発明の実施の形態1であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図6】本発明の実施の形態1であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図7】本発明の実施の形態1であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図8】図5に示すチップ・基板位置認識方法に対する変形例のチップ・基板位置認識方法を示す認識原理図である。
【図9】本発明の実施の形態2であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図10】本発明の実施の形態2であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図11】本発明の実施の形態3であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【図12】本発明の実施の形態3であるフリップチップボンダにおけるチップ・基板位置認識方法の一例を示す認識原理図である。
【符号の説明】
1 フリップチップボンダ
2 ボンディング処理部
2a マウントステージ
2b ボンディングヘッド
2c コレット
2d 光学プローブ
2d1 下視野認識カメラ
2d2 上視野認識カメラ
2d3 プリズム
2d4 プリズム
2e 光学プローブ
3 配線基板
3a 認識マーク
3b リード
3c 配線
3d 開口部
4 半導体ウエハ
5 半導体チップ
5a 認識マーク
5b 主面
5c パッド
5d 裏面
6 XYテーブル
7 認識部
8 ウエハセット部
8a ウエハ支持台
8b フリップヘッド
9 ウエハリフタ
10 搬送部
11 ローダ
12 アンローダ
13 CSP
14 バンプ電極
15 エラストマ
16 封止部
17 第1あわせ治具
17a リードパターン(認識パターン)
18 第2あわせ治具
18a パッドパターン (認識パターン)
19 光学プローブ
19a 認識カメラ
20 第1あわせ治具
20a リードパターン(認識パターン)
21 第2あわせ治具
21a パッドパターン(認識パターン)
22 冷却保温システム
Claims (4)
- (a)第1あわせ治具と第2あわせ治具とを対向して上下に配置し、前記第1あわせ治具と前記第2あわせ治具との間に、前記第1あわせ治具の認識パターンと前記第2あわせ治具の認識パターンとが撮像可能な光学プローブを配置する工程と、
(b)前記光学プローブの上視野によって前記第1あわせ治具の認識パターンを撮像し、同時に前記光学プローブの下視野によって前記第2あわせ治具の認識パターンを撮像して、対向する前記両者の認識パターンの位置を求める工程と、
(c)求められた前記両者の認識パターンの位置に基づいて前記第1あわせ治具と前記第2あわせ治具とを位置合わせして接合する工程と、
(d)前記光学プローブの下視野によって前記第1あわせ治具の認識パターンを撮像して、前記第1あわせ治具の認識パターンの位置を求める工程と、
(e)前記光学プローブの上視野で求められた前記第1あわせ治具の認識パターンの位置と前記光学プローブの下視野で求められた前記第1あわせ治具の認識パターンの位置とのずれを求める工程とを有し、
半導体チップとチップ支持部材とを接合する際の位置補正に、前記ずれを前記光学プローブの上下視野の光軸ずれとして加味することを特徴とする半導体装置の製造方法。 - (a)第1あわせ治具と第2あわせ治具とを対向して上下に配置し、前記第1あわせ治具と前記第2あわせ治具との間に、前記第1あわせ治具の認識パターンと前記第2あわせ治具の認識パターンとが撮像可能な第1の光学プローブを配置し、前記第1あわせ治具の上方に第2の光学プローブを配置する工程と、
(b)前記第1の光学プローブの上視野によって前記第1あわせ治具の認識パターンを撮像し、同時に前記第1の光学プローブの下視野によって前記第2あわせ治具の認識パターンを撮像して、対向する前記両者の認識パターンの中心座標を求める工程と、
(c)前記第2の光学プローブによって前記第1あわせ治具の認識パターンを撮像して、前記第1あわせ治具の認識パターンの中心座標を求める工程と、
(d)前記(b)工程で求められた対向する前記両者の認識パターンの中心座標に基づいて前記第1あわせ治具と前記第2あわせ治具とを位置合わせして重ね合わせる工程と、
(e)前記第2の光学プローブによって前記第2あわせ治具の認識パターンを撮像して、前記第2あわせ治具の認識パターンの中心座標を求める工程と、
(f)前記第2の光学プローブで求められた前記第1あわせ治具の認識パターンの中心座標と前記第2あわせ治具の認識パターンの中心座標との差を求める工程とを有し、
半導体チップとチップ支持部材とを接合する際の位置補正に、前記差を前記第1の光学プローブの上下視野の光軸ずれとして加味することを特徴とする半導体装置の製造方法。 - (a)第1あわせ治具と第2あわせ治具とを対向して上下に配置し、前記第1あわせ治具と前記第2あわせ治具との間に、前記第1あわせ治具の認識パターンと前記第2あわせ治具の認識パターンとが撮像可能で、かつ冷却保温システムによって囲まれた光学プローブを配置する工程と、
(b)前記光学プローブの上視野によって前記第1あわせ治具の認識パターンを撮像し、同時に前記光学プローブの下視野によって前記第2あわせ治具の認識パターンを撮像して、対向する前記両者の認識パターンの位置を求める工程と、
(c)求められた前記両者の認識パターンの位置に基づいて前記第1あわせ治具と前記第2あわせ治具とを位置合わせして接合する工程と、
(d)前記光学プローブの下視野によって前記第1あわせ治具の認識パターンを撮像して、前記第1あわせ治具の認識パターンの位置を求める工程と、
(e)前記光学プローブの上視野で求められた前記第1あわせ治具の認識パターンの位置と前記光学プローブの下視野で求められた前記第1あわせ治具の認識パターンの位置とのずれを求める工程とを有し、
半導体チップとチップ支持部材とを接合する際の位置補正に、前記ずれを前記光学プローブの上下視野の光軸ずれとして加味することを特徴とする半導体装置の製造方法。 - (a)第1あわせ治具と第2あわせ治具とを対向して上下に配置し、前記第1あわせ治具と前記第2あわせ治具との間に、前記第1あわせ治具の認識パターンと前記第2あわせ治具の認識パターンとが撮像可能で、かつ冷却保温システムによって囲まれた第1の光学プローブを配置し、前記第1あわせ治具の上方に第2の光学プローブを配置する工程と、
(b)前記第1の光学プローブの上視野によって前記第1あわせ治具の認識パターンを撮像し、同時に前記第1の光学プローブの下視野によって前記第2あわせ治具の認識パターンを撮像して、対向する前記両者の認識パターンの中心座標を求める工程と、
(c)前記第2の光学プローブによって前記第1あわせ治具の認識パターンを撮像して、前記第1あわせ治具の認識パターンの中心座標を求める工程と、
(d)前記(b)工程で求められた対向する前記両者の認識パターンの中心座標に基づいて前記第1あわせ治具と前記第2あわせ治具とを位置合わせして重ね合わせる工程と、
(e)前記第2の光学プローブによって前記第2あわせ治具の認識パターンを撮像して、前記第2あわせ治具の認識パターンの中心座標を求める工程と、
(f)前記第2の光学プローブで求められた前記第1あわせ治具の認識パターンの中心座標と前記第2あわせ治具の認識パターンの中心座標との差を求める工程とを有し、
半導体チップとチップ支持部材とを接合する際の位置補正に、前記差を前記第1の光学プローブの上下視野の光軸ずれとして加味することを特徴とする半導体装置の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002308721A JP4083533B2 (ja) | 2002-10-23 | 2002-10-23 | 半導体装置の製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002308721A JP4083533B2 (ja) | 2002-10-23 | 2002-10-23 | 半導体装置の製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004146528A JP2004146528A (ja) | 2004-05-20 |
| JP4083533B2 true JP4083533B2 (ja) | 2008-04-30 |
Family
ID=32454788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002308721A Expired - Fee Related JP4083533B2 (ja) | 2002-10-23 | 2002-10-23 | 半導体装置の製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4083533B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4593429B2 (ja) * | 2005-10-04 | 2010-12-08 | キヤノンマシナリー株式会社 | ダイボンダ |
| WO2009096454A1 (ja) * | 2008-01-30 | 2009-08-06 | Toray Engineering Co., Ltd. | チップ搭載方法およびチップ搭載装置 |
| KR20250083585A (ko) * | 2019-05-08 | 2025-06-10 | 도쿄엘렉트론가부시키가이샤 | 접합 장치, 접합 시스템 및 접합 방법 |
| TW202443770A (zh) * | 2023-04-28 | 2024-11-01 | 日商松下知識產權經營股份有限公司 | 處理裝置及處理方法 |
-
2002
- 2002-10-23 JP JP2002308721A patent/JP4083533B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004146528A (ja) | 2004-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5427301A (en) | Ultrasonic flip chip process and apparatus | |
| CN104580859A (zh) | 摄像头模组的装配方法和摄像头模组 | |
| JP4831091B2 (ja) | ダイボンディング装置及びダイボンディング方法 | |
| JP4083533B2 (ja) | 半導体装置の製造方法 | |
| JP4343989B1 (ja) | ボンディング装置およびボンディング装置に用いられるボンディング領域の位置認識方法及びプログラム | |
| JPH06163634A (ja) | フリップチップ型半導体装置の実装方法 | |
| JP3530517B2 (ja) | アライメント補正機能付きフリップチップ実装装置 | |
| JP2000164655A (ja) | アライメント装置及びアライメント方法 | |
| US8664039B2 (en) | Methods and apparatus for alignment in flip chip bonding | |
| JPH10270500A (ja) | 半導体装置の製造方法及びフィルムキャリアテープ | |
| JP2002110742A (ja) | 半導体装置の製造方法および半導体製造装置 | |
| JPH09322075A (ja) | レンズマウント装置 | |
| JP3277308B2 (ja) | 電子部品 | |
| JP2004134443A (ja) | 半導体装置の製造方法 | |
| US20250112201A1 (en) | Bonding systems, and methods of bonding a semiconductor element to a substrate | |
| JP2001176934A (ja) | 半導体装置の製造方法 | |
| JPH06310569A (ja) | 半導体素子のフェースダウンボンディング法 | |
| JP3996101B2 (ja) | 半導体装置の製造装置及び半導体装置の製造方法 | |
| JP3759703B2 (ja) | Cofフィルムを用いた半導体装置及びその製造方法 | |
| TWI890543B (zh) | 置晶偏移量的量測方法 | |
| JP3285087B2 (ja) | テープ検査装置および方法 | |
| JP2000340606A (ja) | 半導体装置の製造方法およびそれを用いた半導体製造装置 | |
| JP2000077591A (ja) | 半導体装置及びその組立方法 | |
| JP3441939B2 (ja) | アライメント方法 | |
| JP2005026278A (ja) | チップ積層装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051004 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20051004 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080213 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110222 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110222 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110222 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110222 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120222 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130222 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140222 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |